基于solidworks 的搬運機械手設計及仿真研究
2022-09-14 06:36:32楊陽
科學技術創新 2022年25期
楊陽
(江蘇師范大學江蘇圣理工學院-中俄學院,江蘇 徐州 221116)
引言
搬運機械手作為工業機械手的一種,經過眾多科研人員的研究推廣,目前搬運機械手應用范圍靈活,在汽車加工生產、化工、機械制造、數碼電子等多個行業中已經被廣泛應用,有效提高了各個企業的工作效率,特別是在高溫、高壓、粉塵、噪聲以及帶有放射性等不適合人類工作的惡劣環境下,搬運機械手可以完全替代工人進行簡單重復的工作[1]。搬運機械手甚至還可以全天不間斷甚至更長時間持續工作,因此搬運機械手的應用得到了廣泛推廣[2-3]。由于搬運機械手在社會各行業中表現出來的獨特優勢,國內外眾多企業投入大量的精力對搬運機械手進行研究和推廣,有的企業目前已經研究出能夠搬運超過1 000 kg 的搬運機械手。但是從生產的整體效益出發,機械手工作的可靠性和穩定性是搬運機械手在滿足生產節拍的前提下反復進行工件搬運的必要前提。因此,很有必要對機械手的力學性能和強度進行研究[4]。
1 搬運機械手結構設計
在工業領域中各類型的搬運機械手隨著社會的需求飛速發展,現在已開發出了多種不同的搬運方式,其中應用最為廣泛的主要有多關節回轉式機械手、直角坐標式機械手、擺臂式機械手和AGV 機械手4 種。
搬運機械手的主體為直角坐標式結構,由支撐柱、橫梁、X 軸運動平臺、Y 軸運動平臺、Z 軸運動平臺、末端執行裝置即機械手爪部分組成,見圖1。
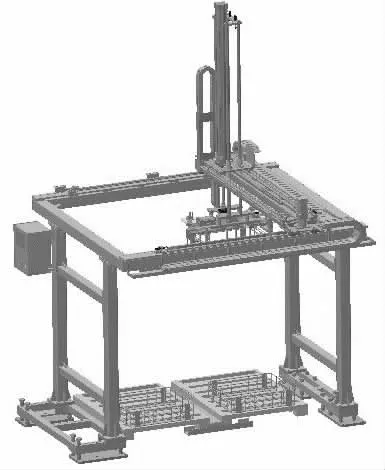
圖1 搬運機械手三維圖
其中支撐柱、橫梁、Y 軸運動平臺構成底架,采用方管型材。采用這種機構的搬運機械手具有X、Y、Z三個移動自由度和一個機械手自由度。其中,由X、Y、Z 三個軸的相互運動可實現機械手末端手爪在一定的空間內工作。按照現場的工況條件,設計搬運機械機械手的Y 軸行程為1 400 mm,X 軸行程為1 700 mm,Z 軸行程為1 200 mm,由此設計得到重載搬運機械手模型的總體尺寸為2 260 mm×2 019 mm×3 320 mm。搬運機械手的框架選用了普通碳鋼,其屈服強度為220 MPa,密度為7 800 kg/m3,彈性模量為210 GPa,泊松比為0.28,綜合性能較好。
依據所設計的機械手結構,X、Y、Z 三軸的運動均為直線運動。因為直線導軌的剛性和承載力較高,即使在高負荷狀態下也能夠實現較高精度的直線運動。所以,搬運機械手采用直線導軌作為運動軌道。
2 靜力學分析
前文依據具體工況對搬運機械手的工作原理和機械結構進行簡述,確定搬運機械手總體和關鍵部件的結構形式,并通過solidworks 軟件對搬運機械手的結構進行建模。但是考慮到對所設計的搬運機械手提出的能夠穩定運行的關于設計方面的要求,只有三維模型還無法確定其是否滿足設計要求。所設計的搬運機械手的主體采用直角坐標式結構,由支撐柱、橫梁、X 軸運動平臺、Y 軸運動平臺、Z 軸運動平臺和末端執行裝置即機械手爪部分組成。其中支撐柱、橫梁、Y 軸運動平臺共同構成了搬運機械手的主體機架,其余部分在機架上做往復運動,機架為搬運機械手的主要受力部件,必須具有足夠承載的機械剛度和強度。因此,為確保搬運機械手能夠穩定運行,要對搬運機械手機械部件進行可靠性的校驗和強度校核。在對機件進行靜力學分析的過程中,主要是為了計算構件在不考慮慣性和阻尼的因素情況下,有固定載荷施加在機件上時機件的應力、應變和位移的反應情況。使用solidworks 插件對搬運機械手的整體結構進行強度校核,可以計算出靜載荷狀態下搬運機械手整體結構的應力數值,同時還能得到近似于實際的工作狀態下的變形情況,為搬運機械手的結構設計提供理論性依據。
2.1 機架靜力學分析
在通過使用solidworks 插件對結構進行靜力學分析時,首先要對需要仿真的構件使用的材料屬性進行定義,在設計時搬運機械人所選用的材料為普通碳鋼,因此在本次有限元建模過程中,對機架的材料屬性進行定義為普通碳鋼。其次對搬運機械人機架的所受負載施加受力。表1 為搬運機械人各主要機構質量表。

表1 搬運機械手部分機構重量/ kg
搬運機械人機架所需承受負載的總重量約為129 kg,機架總負載約為1 264.2 N,按1 300 N 計算。考慮到整個機架的負載的承重主要在Y 軸的兩個橫梁上,因此將總負載均分成大小為650 N 的兩個載荷分布在Y 軸的兩個橫梁上。此外,對搬運機械手進行靜力學分析時還必須施加必要的限制來模擬真實的靜止情況,因此在靜力學分析過程中需要在支撐柱底面添加固定約束。然后對搬運機械人機架進行網格劃分,仿真結果準確與否主要由劃分的網格質量決定。因此網格參數選擇根據曲率的網格選擇,網格最大單元尺寸為35 mm,最大單元尺寸為7 mm,整個模型共劃分999 673 個節點和518 418 個單元,網格精度良好。劃分好的網格模型和載荷見圖2。
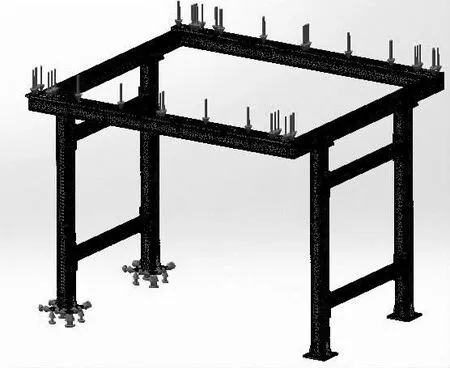
圖2 機架靜力學網格模型和載荷
在對搬運機械手的機架有限元仿真邊界條件的設置施加載荷并進行網格劃分后,開始運行對搬運機械手機架進行靜力分析求解。得到搬運機械手機架的應力云圖和位移云圖,見圖3 和圖4。
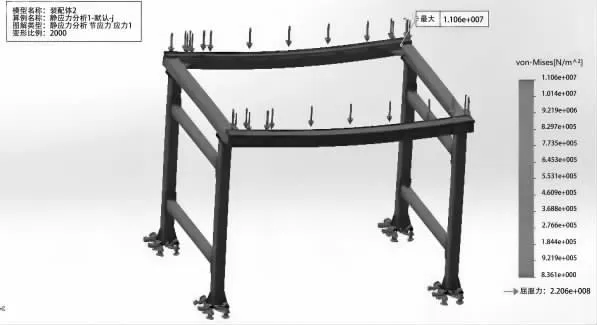
圖3 機架應力變化云圖
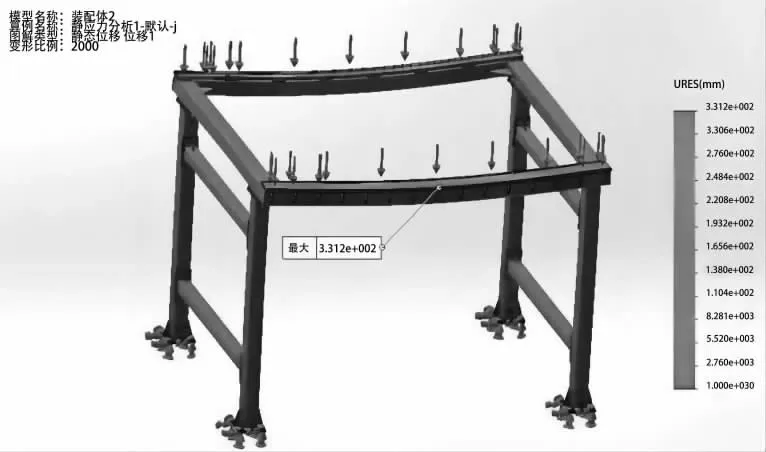
圖4 機架位移變化云圖
從圖3 的搬運機械手機架的應力變化云圖中可以看到,機架所受到的應力很小,最大應力位于Y 運動平臺行走軌道的機架焊縫處,僅為110.6 MPa,小于焊縫抗拉強度,滿足設計要求。從圖4 的搬運機械人機架位移變化云圖中可以看到,機架在最大靜載荷作用下的最大變形僅僅為0.033 mm,其位于Y 軸運動平臺橫梁的中部。靜力分析結果表明,搬運機械人機架橫梁部分變形量很小,所設計的機架結構具有足夠的機械強度,搬運機械手的機架整體的安全系數較高,完全滿足作業要求。
炒鍋、ZG-YM1701型志高破壁料理機,寧波趙記電器有限公司產品;ZDG-5型真空冷凍干燥機,廣東梅州永利機械設備有限公司產品。
2.2 X 軸機構靜力學分析
搬運機械手搬運物料的動作主要依靠Z 軸機構帶動機械手抓取零件上下運動實現,整個Z 軸機構和機械手抓取的零件所有重量全由X 軸機構承受。因此X 軸機構是承載Z 軸機構、機械手和物料運動的關鍵結構,如果X 軸機構剛度和強度不足,就很容易導致Z 軸機構帶動物料運動時不能穩定運行,在嚴重的情況下,這甚至可能會危及工作人員的安全,因此必須對X 軸機架進行靜力校核。
使用solidworks 插件對X 軸機架進行靜力校核的過程與搬運機械手機架靜力學校核設置過程基本一樣,此處不再詳細描述。
由表1 可知,Z 軸機構和機械手以及物料的總質量為87 kg,因此,X 軸機架承受的總負載為852.6 N,為保證安全按照900 N 計算。整個Z 軸機構主要通過直線導軌加滑塊在X 軸機構上運動,所以將總負載均分成大小為450 N 的兩個載荷,均勻分布在X 軸的兩個橫梁上。載荷設置完成后對其進行網格劃分,網格參數選擇基于曲率的網格,網格最大單元尺寸為35 mm,最大單元尺寸為7 mm,整個X 軸機架模型總共劃分為250 330 個節點和129 389 個單元,見圖5。
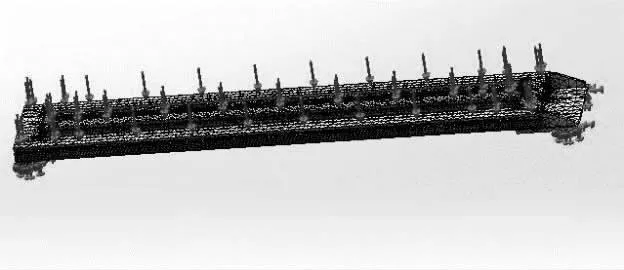
圖5 X 軸劃分網格模型和載荷
對此進行求解和計算,X 軸機架的靜力學計算應力云圖和位移云圖見圖6 和圖7。
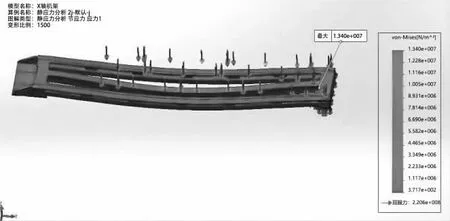
圖6 X 軸機構應力變化云圖
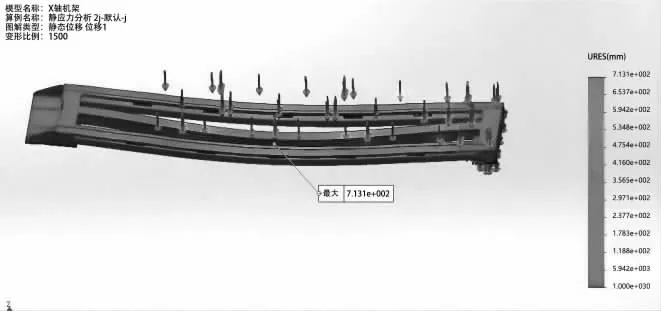
圖7 X 軸機構位移變化云圖
由圖7 應力變化云圖中可以看出,X 軸機構最大應力點位于運動平臺的焊縫處,機架所受應力很小,僅為134 MPa,發現遠小于焊縫抗拉強度,滿足設計要求。由圖8 X 軸機構位移變化云圖中可以看出,在最大載荷作用下的X 軸機構的最大變形量位于X 軸橫梁的中部,為0.07 mm,變形量微小。X 軸機構靜力分析結果表明,所設計的搬運機械人X 軸機構具有足夠的剛度和機械強度,在抓取重物后Z 軸的運動不受影響,完全符合作業要求。
3 模態分析
因為振動模態是彈性結構所固有的、整體的特性,所以模態分析主要對各零件的固有頻率和振型來進行研究。各種零件均有其自身固定的振動頻率,當這個振動頻率被激活時,內部就會形成與其相對應的振蕩形式,它們叫做內部共振頻率和振動模態[6]。在機械設備進行過程中為避免設備出現共振現象,可以使用模態分析計算設備在特定頻率范圍內易受影響,從而就能夠提前預測設備在此頻段內,受外界負載下對振動的實際響應,優化對設備的系統動態特性[7]。
對于具有多個自由度的一般系統而言,它們的振動都可以由自身的自由振動模態來合成[8]。將重載搬運機械手視為無阻尼系統,該無阻尼系統的n 個自由度的自由振動方程表示為

式中:[M]和[K]是重載搬運機械手的質量矩陣以及剛度矩陣,為n×n 階方陣;{X}是重載搬運機械手的位移向量,為n×1 階列陣。
將(2)式表示為位移向量的形式

應用線性變換式{x}=[u]{y},上述耦合系統的微分方程組,用{x}表示,進行解耦,為了對方程組進行解耦,需要得到一個矩陣[u],即振型矩陣。得到了系統的特征值和特征向量,即系統的固有頻率和振型向量,就可以得到振型矩陣[u][8]。
為此,假定是由一系列頻率的簡諧振動組成了系統的振動,設{A}為{x}的振幅列陣,φ 為運動的初始相位[9-10],則此時系統的運動方程可表示為
把(4)式代入(1)式,整理簡化,得到系統的特征矩陣方程:
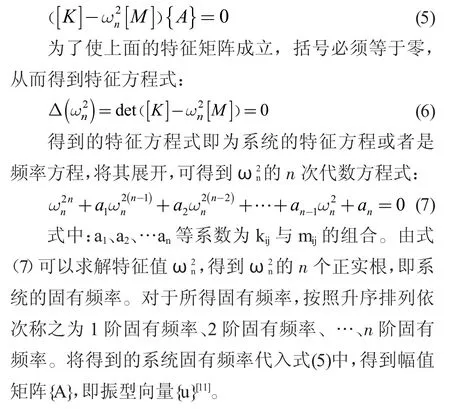
在模態分析過程中,首先要對分析對象選用的材料屬性進行設定,本次的模態分析所選用的材料為普通碳鋼,它的彈性模量、泊松比和材料密度等屬性在前文已給出,此處不再贅述。此外,對搬運機械手進行模態分析時還需要施加必要的約束來模擬實際固定情況,因此在靜力學分析過程中需要在支撐柱底面添加固定約束。機架有限元運算前網格劃分的主要參數為網格參數,設置基于曲率的網格,網格最大單元尺寸為35 mm,最大單元尺寸為7 mm,經過適當調整后,得到的網格見圖8。

圖8 機架模態網格模型和載荷
從上面模態分析的理論基礎可以看出,系統有無數階固有頻率,每階固有頻率都對應著一個振型,但是對系統動態特性影響最大的頻率以低階頻率為主,因此只需分析搬運機械手機架的前6 階模態[12],分析結果見表2。
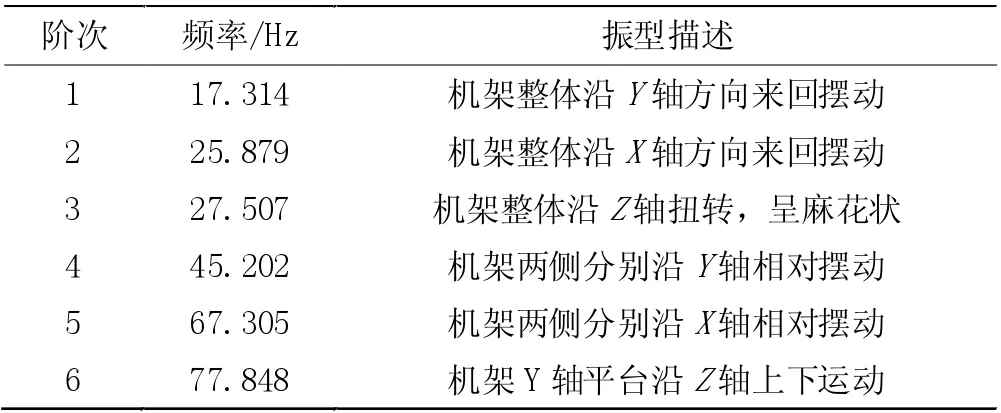
表2 重載搬運機械手底架前四階頻率和振型
模態分析得到的搬運機械手機架的前6 階振型見圖9。從模態分析的結果中可以看出,機架的1 階振型為整體沿Y 軸方向進行來回擺動,以此來作為搬運機械手的主要運動方向,對機械手能否穩定運行有非常大的影響。當電機經減速機和齒條帶動X 軸機構、Z軸機構和物料在Y 軸平臺來回運動時,對機械手機架施加的外部激振力引起的頻率與機架的頻率相近時會引起整個機架共振。搬運機械手Y 軸機構選用的電機轉速為1 500 r/min,輸出轉速為125 r/min,因此我們發現施加在機架上的激振頻率為3.738 Hz,遠小于機械手機架的1 階頻率17.314 Hz,不會發生共振。由于搬運機械手的X 軸運動機構并未固定在機械手的整體機架上,同時由靜力學分析可知機架的橫梁中間處,因此由后面模態仿真結果看出機架容易在X 軸方向擺動或繞Z 軸發生扭轉。當搬運機械手的X 軸機構安裝之后可以有效提高搬運機械手的整體剛度。
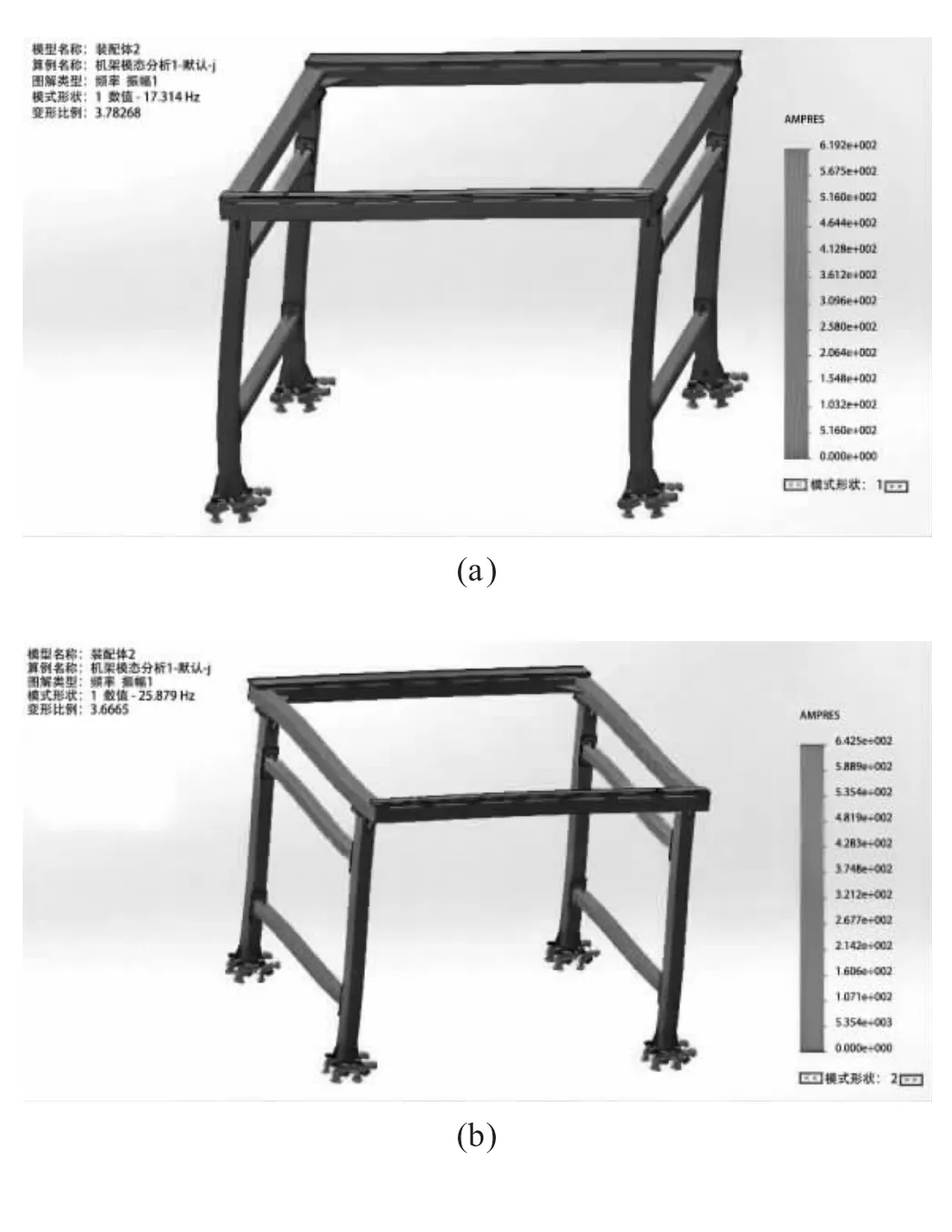
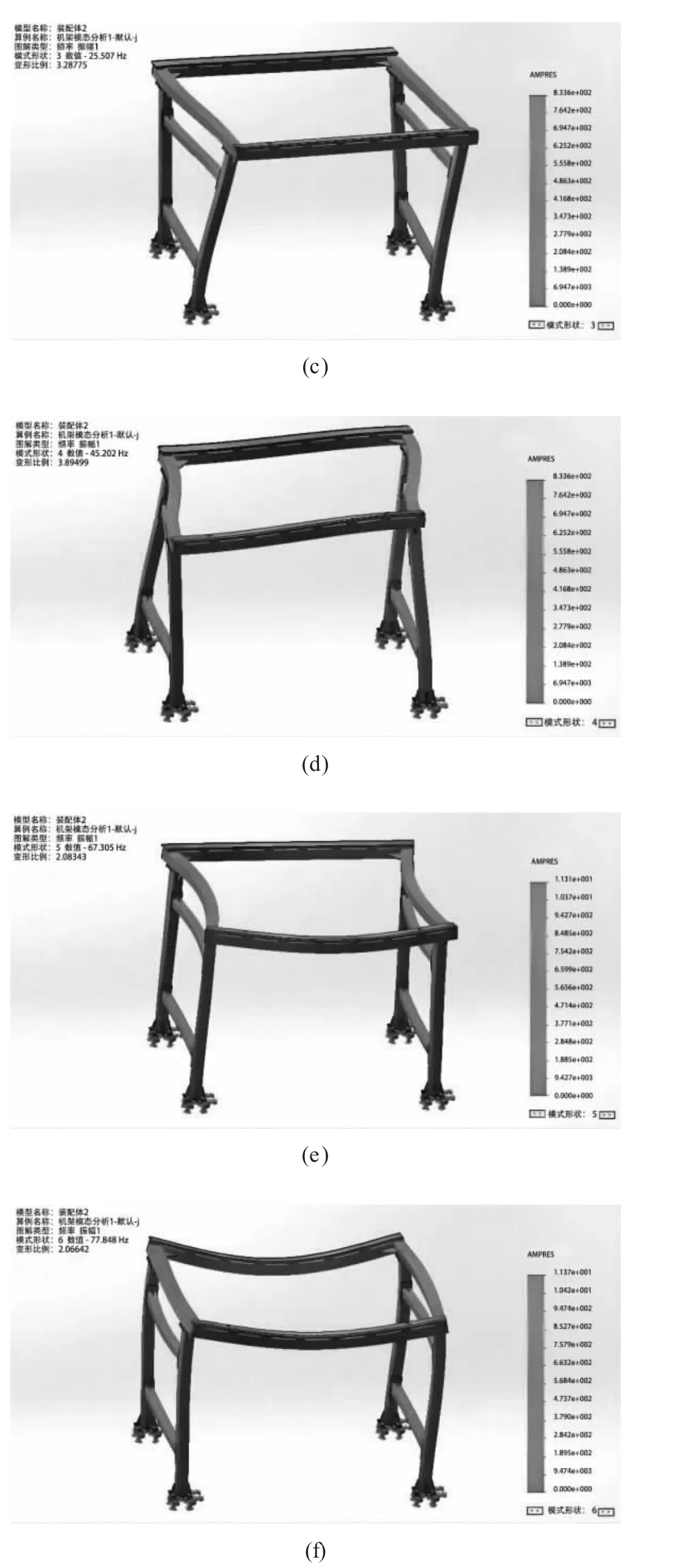
圖9 機架模態前6 階振型
4 結論
本研究設計了一種新型搬運機械手,利用solidworks 軟件對搬運機械手的整體機構進行了建模,通過simulation 對搬運機械手的機架進行了靜力學分析。靜力學分析結果表明搬運機械人機架橫梁和X 軸平臺變形量很小,所設計的機架結構和X 軸平臺具有足夠的機械強度;電機激振頻率為3.738 Hz,遠小于機架的一階頻率17.314 Hz,所以不會發生共振現象。因此,所設計的新型搬運機械手結構穩定。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
當代工人(2020年8期)2020-05-25 09:07:38
電子制作(2018年18期)2018-11-14 01:48:24
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
山東工業技術(2016年15期)2016-12-01 05:31:22
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
