基于MATLAB 計(jì)算的“8”字勢(shì)能驅(qū)動(dòng)車的設(shè)計(jì)
2022-09-14 06:36:32孫喬寵崔瑩超李鵬飛張志高李文慧劉盛杰
科學(xué)技術(shù)創(chuàng)新 2022年25期
關(guān)鍵詞:設(shè)計(jì)
孫喬寵,崔瑩超,李鵬飛,張志高,李文慧,李 越,劉盛杰
(河南科技大學(xué)機(jī)電工程學(xué)院,河南 洛陽(yáng) 471003)
1 設(shè)計(jì)要求
根據(jù)第七屆工程訓(xùn)練賽的要求,需要自主設(shè)計(jì)和制作一臺(tái)可以控制前進(jìn)方向的自行走勢(shì)能驅(qū)動(dòng)車,在規(guī)定的賽道上,該車運(yùn)動(dòng)時(shí)必須與賽道表面接觸運(yùn)行,而且驅(qū)使小車運(yùn)動(dòng)所需的全部能量都必須由重力勢(shì)能轉(zhuǎn)換得到,不能使用任何其他形式的能量。重力勢(shì)能由重物下落得到,要求重物質(zhì)量為1 kg±10 g,從300±2 mm 的高度下降。在小車運(yùn)動(dòng)過程中,重物不允許從小車上掉落[1]。
勢(shì)能驅(qū)動(dòng)車的賽道一塊是5 200 mm×2 200 mm的長(zhǎng)方形平面區(qū)域,見圖1,圖中粗實(shí)線為邊界擋板,賽道中間的缺口長(zhǎng)度是1 000 mm,賽道上的圓點(diǎn)代表障礙樁,障礙樁是直徑20 mm、高200 mm 的圓棒,障礙樁間距指兩個(gè)障礙樁中心線之間的距離。賽道中心線用點(diǎn)畫線表示,用來(lái)計(jì)量運(yùn)行成績(jī)以及判定有效地繞樁;勢(shì)能驅(qū)動(dòng)小車發(fā)車時(shí)必須在“發(fā)車區(qū)”內(nèi),并在“發(fā)車線”后按照逆時(shí)針方向發(fā)車。最后根據(jù)有效繞樁個(gè)數(shù)和運(yùn)行距離來(lái)判定成績(jī)。
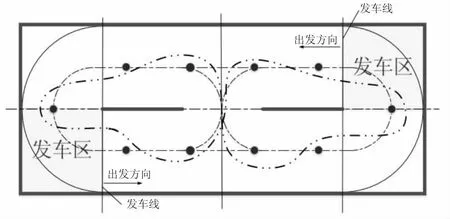
圖1 比賽場(chǎng)地俯視圖
2 設(shè)計(jì)思路
筆者選擇的是“8”字運(yùn)行方式,運(yùn)行軌跡見圖2,根據(jù)小車運(yùn)行路線和比賽場(chǎng)地的要求,通過MATLAB、UG 等軟件進(jìn)行凸輪輪廓的設(shè)計(jì),這是轉(zhuǎn)向機(jī)構(gòu)設(shè)計(jì)的重要一環(huán),凸輪選擇的是盤形凸輪;動(dòng)力傳動(dòng)采用兩對(duì)齒輪傳動(dòng)實(shí)現(xiàn),將動(dòng)力分別傳到驅(qū)動(dòng)小車前進(jìn)的后輪和控制小車前進(jìn)方向的前輪;小車底部繞線軸采用階梯軸的方式,后輪設(shè)計(jì)采用差速方式;最后利用激光加工、線切割、車削、鉆削等方式進(jìn)行非標(biāo)準(zhǔn)件的加工,并在組裝之后進(jìn)行多次調(diào)試,不斷優(yōu)化設(shè)計(jì),最后在比賽中收獲了不錯(cuò)的效果。以下筆者將較為詳細(xì)介紹各個(gè)重要機(jī)構(gòu)的設(shè)計(jì)思路。
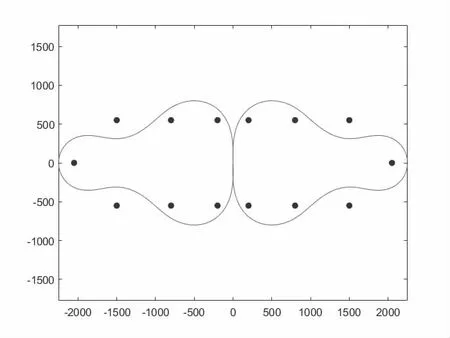
圖2 小車運(yùn)行軌跡圖
3 結(jié)構(gòu)設(shè)計(jì)
3.1 傳動(dòng)設(shè)計(jì)
小車的動(dòng)能均由重錘的重力勢(shì)能轉(zhuǎn)換而來(lái),重力勢(shì)能一部分通過齒輪嚙合驅(qū)動(dòng)后輪轉(zhuǎn)動(dòng),另一部分通過齒輪嚙合和凸輪機(jī)構(gòu)驅(qū)動(dòng)前輪周期性擺動(dòng),難點(diǎn)在于要保證輪子行走的距離要和前輪擺向協(xié)調(diào)一致,保證凸輪旋轉(zhuǎn)1 圈,小車可以運(yùn)行1 周。選用3 根傳動(dòng)軸,一軸和二軸上的齒輪傳動(dòng)比為2.25,三軸和一軸上的齒輪傳動(dòng)比為8,齒輪一模數(shù)0.5 mm,齒輪二模數(shù)0.5 mm,齒輪三模數(shù)0.5 mm[2]。軸一上的繞線軸,最初繞線的部分軸徑較大,便于提供較大的轉(zhuǎn)矩,用來(lái)保證小車地正常啟動(dòng),之后的軸徑趨于一確定值,階梯軸采用的是3D 打印的加工方式,質(zhì)量較輕,又能滿足使用要求,動(dòng)力傳動(dòng)示意圖見圖3。
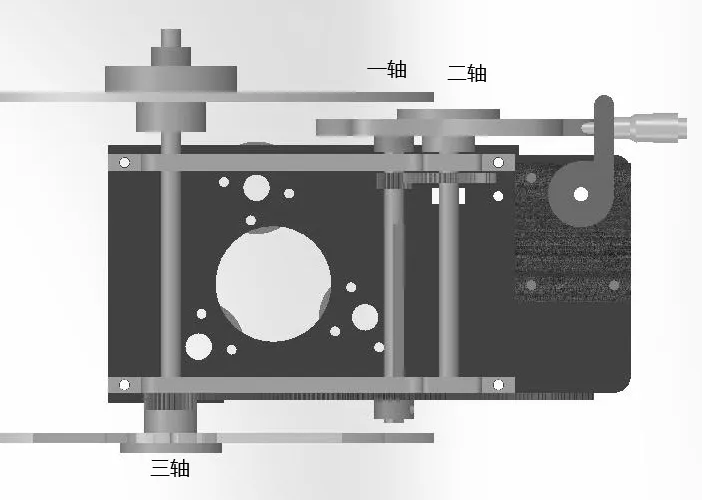
圖3 動(dòng)力傳動(dòng)示意圖
3.2 轉(zhuǎn)向機(jī)構(gòu)
轉(zhuǎn)向機(jī)構(gòu)采用的是凸輪機(jī)構(gòu),凸輪采用盤形凸輪,從動(dòng)件為擺動(dòng)從動(dòng)件,從動(dòng)件由前輪支架和擺桿裝配而成[3],兩者之間為過盈配合。
轉(zhuǎn)向機(jī)構(gòu)中盤形凸輪的設(shè)計(jì)是關(guān)鍵,小車運(yùn)行時(shí)的簡(jiǎn)圖見圖4,圖4 中O 點(diǎn)是小車運(yùn)行到此點(diǎn)時(shí)的曲率圓心,A 點(diǎn)是擺桿的旋轉(zhuǎn)中心,CD 代表凸輪,B 點(diǎn)是垂足,C 點(diǎn)是凸輪和擺桿的接觸點(diǎn),D 點(diǎn)是凸輪的“基圓”圓心。
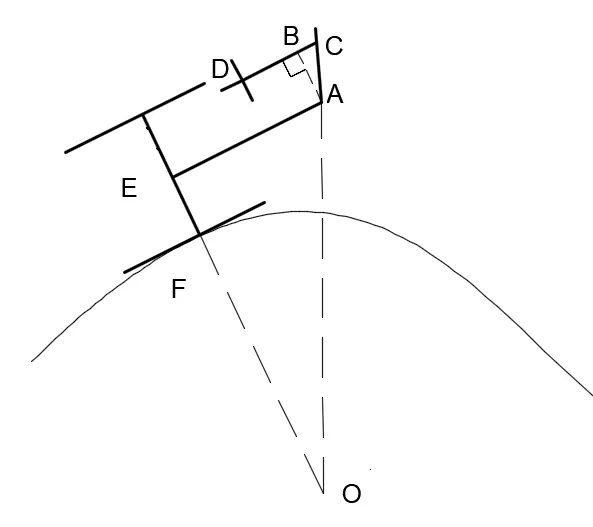
圖4 小車運(yùn)行簡(jiǎn)圖
線段BC 的長(zhǎng)度相當(dāng)于凸輪這一點(diǎn)相對(duì)于凸輪“基圓”的增量(增量可正可負(fù)),而凸輪轉(zhuǎn)1 周小車就沿著賽道運(yùn)行1 圈,若在凸輪上取若干點(diǎn),求得每一點(diǎn)相對(duì)于凸輪“基圓”的增量,那么最終就可以得到凸輪的整圈輪廓。所以關(guān)鍵問題就是求解BC 的長(zhǎng)度。
由于△ABC 中
BC=AB×tan(∠CAB)式中AB 是在設(shè)計(jì)中確定的已知量,另外,由圖4 得知∠CAB 和∠AOE 相等,
而式中AE 是設(shè)計(jì)中可以確定的已知量,OE=OF+EF,其中EF 也是設(shè)計(jì)時(shí)可以確定的已知量,所以只要求出OF 就可求出BC 的長(zhǎng)度,而OF 就是內(nèi)側(cè)輪子運(yùn)行到此點(diǎn)時(shí)的曲率半徑。
根據(jù)上述原理,首先要將軌跡描繪出來(lái),常用數(shù)學(xué)函數(shù)或者用坐標(biāo)點(diǎn)表示。由于軌跡較為復(fù)雜,如果選用數(shù)學(xué)函數(shù)表示的方法將會(huì)很困難,而且也不利于以后的調(diào)節(jié),所以選用坐標(biāo)點(diǎn)表示。利用UG 將軌跡用樣條曲線繪制出來(lái),然后運(yùn)用UG 的曲線分析的功能將軌跡點(diǎn)導(dǎo)出,先將這些點(diǎn)導(dǎo)入MATLAB,通過MATLAB 編程計(jì)算出凸輪輪廓。
3.3 優(yōu)化處理
初步編寫程序計(jì)算出凸輪輪廓見圖5。

圖5 優(yōu)化前的凸輪輪廓
可見直接生成的會(huì)比較粗糙,凹凸變化比較劇烈,這樣不利于實(shí)現(xiàn)運(yùn)動(dòng)的準(zhǔn)確性。采用更加復(fù)雜的算法對(duì)其進(jìn)行一些優(yōu)化,將輪廓處理的圓滑一點(diǎn),見圖6。這樣可以在接觸的時(shí)候更順滑,然后通過優(yōu)化后的凸輪模擬運(yùn)行的軌跡,觀察是否與預(yù)定軌跡重合,如果重合就可以導(dǎo)出進(jìn)行加工和試驗(yàn)。

圖6 優(yōu)化后的凸輪輪廓
3.4 微調(diào)機(jī)構(gòu)
我們選擇的微調(diào)機(jī)構(gòu)是在擺動(dòng)從動(dòng)件上開一個(gè)孔,把千分頭固定在孔中,使千分頭與凸輪接觸,形成一個(gè)高副[4]。這種微調(diào)機(jī)構(gòu)與蝸輪蝸桿機(jī)構(gòu)相比具有組裝容易、調(diào)節(jié)精度高及實(shí)現(xiàn)微調(diào)時(shí)操作起來(lái)也更簡(jiǎn)便等優(yōu)點(diǎn),見圖7。

圖7 微調(diào)機(jī)構(gòu)
3.5 小車后輪的差速設(shè)計(jì)
如果兩輪同速轉(zhuǎn)動(dòng),就會(huì)與地面產(chǎn)生相對(duì)滑動(dòng)使軌跡不準(zhǔn)確,所以要有差速機(jī)構(gòu)進(jìn)行差速處理,保證軌跡的準(zhǔn)確性。我們做了一個(gè)簡(jiǎn)單的差速結(jié)構(gòu),將其中一個(gè)輪作為從動(dòng)輪,只起到支撐的作用,將其與后輪軸之間用一個(gè)軸承隔開,使它們?cè)谵D(zhuǎn)動(dòng)的時(shí)候速度可以不同,起到差速的作用。
3.6 各機(jī)構(gòu)間的運(yùn)動(dòng)聯(lián)系
首先重物從頂部下落,帶動(dòng)重錘線,重錘線帶動(dòng)繞線軸(一軸)轉(zhuǎn)動(dòng),在一軸上固定的齒輪分別帶動(dòng)二軸(凸輪軸)齒輪和三軸(主動(dòng)軸)齒輪運(yùn)動(dòng),凸輪不斷轉(zhuǎn)動(dòng),從而可以推動(dòng)擺桿周期性轉(zhuǎn)動(dòng),進(jìn)而控制著前輪的擺動(dòng)角度,從而實(shí)現(xiàn)運(yùn)動(dòng)方向的控制,而后輪則在前輪地指引下不斷推動(dòng)小車向前運(yùn)動(dòng)[5]。
3.7 注意事項(xiàng)
(1)根據(jù)能量守恒定律,重物下落所產(chǎn)生的重力勢(shì)能一部分用來(lái)驅(qū)動(dòng)小車在賽道上行駛時(shí)與地面摩擦,另一部分被小車內(nèi)部的零件磨損消耗掉[8]。因此,在總的重力勢(shì)能恒定的前提下,為了提高效率,要優(yōu)化小車的結(jié)構(gòu),努力做到簡(jiǎn)化高效。
(2)小車在賽道上要保持適當(dāng)?shù)乃俣龋俣冗^快,在轉(zhuǎn)彎時(shí)由于慣性等因素很容易發(fā)生側(cè)翻,速度過慢,可能會(huì)因?yàn)橘惖滥承┑胤降牟黄椒€(wěn)而無(wú)法持續(xù)運(yùn)行[6]。
(3)小車在轉(zhuǎn)彎時(shí)后面的兩個(gè)輪子的曲率半徑不同,但轉(zhuǎn)動(dòng)的角速度相同,所以后面的兩個(gè)輪子轉(zhuǎn)動(dòng)的線速度并不相同,所以后面兩個(gè)輪子要實(shí)現(xiàn)差速設(shè)計(jì)。
(4)由于靜摩擦力是要大于動(dòng)摩擦力,所以啟動(dòng)時(shí)需要的啟動(dòng)力矩要比正常行走時(shí)的力矩大一些,因此,需要做到在啟動(dòng)階段繞線軸的軸徑要更大,之后均勻的變小,在啟動(dòng)完成后軸徑趨于某一定值。如不采用這種方式,當(dāng)軸徑過小時(shí),無(wú)法正常啟動(dòng),當(dāng)軸徑過大時(shí),雖然可以正常啟動(dòng),但是在場(chǎng)地上加速前進(jìn),而不是緩慢勻速前進(jìn),容易發(fā)生側(cè)翻或不能按照預(yù)定軌跡運(yùn)動(dòng)等事故。
(5)小車在運(yùn)動(dòng)時(shí)通過軸承會(huì)對(duì)小車輪子施加作用力,會(huì)引起小車的輪子發(fā)生形變,如果選用強(qiáng)度較低的材料在運(yùn)動(dòng)時(shí)會(huì)發(fā)生較大的形變,會(huì)使小車的偏離預(yù)定的運(yùn)行軌跡,嚴(yán)重時(shí)會(huì)引起翻車,所以應(yīng)選用強(qiáng)度滿足要求的材料。
4 創(chuàng)新點(diǎn)
(1)小車的微調(diào)機(jī)構(gòu)采用的是千分頭,與蝸輪蝸桿等其他微調(diào)機(jī)構(gòu)相比,優(yōu)點(diǎn)是用千分頭可以把微調(diào)量更精確的量化[7],可以解決微調(diào)時(shí)過小過大等無(wú)法快速、準(zhǔn)確實(shí)現(xiàn)微調(diào)的問題。
(2)在動(dòng)力分配設(shè)計(jì)時(shí)只采用了兩對(duì)齒輪傳動(dòng),可以避免因采用過多對(duì)齒輪傳動(dòng),而造成能量利用率下降的問題,這也側(cè)面證明了小車整體的設(shè)計(jì)比較合理緊湊。
5 結(jié)論
本研究簡(jiǎn)要介紹了制作“8”字勢(shì)能驅(qū)動(dòng)車的思路,使用MATLAB、UG 等軟件進(jìn)行凸輪設(shè)計(jì),小車的結(jié)構(gòu)整體簡(jiǎn)單合理,可以保證小車按預(yù)定的軌跡運(yùn)行。同時(shí),也設(shè)計(jì)了微調(diào)機(jī)構(gòu),用來(lái)增強(qiáng)小車對(duì)不同賽道的適應(yīng)能力。在大量的實(shí)際調(diào)試中,小車整體運(yùn)行平穩(wěn),實(shí)際運(yùn)行軌跡和預(yù)期相吻合,證明了小車結(jié)構(gòu)設(shè)計(jì)的合理性。
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
