基于LabVIEW的伸縮臂越野叉車參數監控系統設計
2022-09-14 09:11:56肖超海程志群張軍何承元洪啟升葉敏
中國工程機械學報 2022年4期
關鍵詞:系統
肖超海,程志群,張軍,何承元,洪啟升,葉敏
(1.安徽好運機械有限公司技術中心 安徽 合肥 230601;2.西安卓士博液壓工程有限責任公司技術中心,陜西 西安 710119;3.長安大學工程機械虛擬仿真實驗教學中心,陜西 西安 710064)
叉車是用于堆垛、裝卸貨物使用頻率最高、需求數量最多的工程機械車輛,在短途貨物運輸中得到廣泛應用。越野叉車是兼具高空作業和叉車功能的伸縮臂越野叉車,具有全輪驅動、爬坡能力強的特點,在建筑工地、山林果園、油田開發、管道鋪設以及在工廠倉庫、港口碼頭貨物提升或搬運等作業環境惡劣的地方應用廣泛,具有良好的市場前景。目前我國在越野叉車的研究和應用上還處于起步階段,市場份額被國外品牌占據。因此,迫切需要開展伸縮臂式越野叉車的基礎研究,特別是掌握越野叉車的作業工況和性能,對提升產品品質有重要意義。
現有的研究集中在越野叉車的液壓系統和電控系統2方面,重點關注越野性能。越野叉車驅動系統采用變量泵和變量馬達的雙變量方案,有效分配泵馬達排量是難點。為解決行駛系統中無級變速和負載自適應的功能要求,王勇等[1-2]從電控角度對泵和馬達的功率匹配、發動機的極限功率保護功能進行了分析,但未對兩者如何適應變復雜工況做深入探討。針對相同問題,姚凱等[3]從液壓系統著手,采用力士樂的DA泵來滿足負載自適應要求,借助液壓系統的壓力反饋進行變速,可實現行駛系統的無極變速,但犧牲了快速響應性。王勇等[4]對行走液壓系統工作參數進行了設計計算,康劉陽[5]采用仿真方法對越野叉車的復合傳動系統進行了分析,為行走系統中的泵和馬達的參數選擇提供了依據。此外,針對伸縮臂式越野叉車工作臂,羅艷蕾等[6]采用Matlab分析了舉升裝置的工作參數,為研究伸縮臂式越野叉車提供參考。關于越野叉車行駛系統的負載自適應以及伸縮臂式越野叉車的工作性能,還是缺乏深入研究。
為解決伸縮臂越野叉車在開發中遇到的技術難題和提升車輛的作業性能,本文以自行研制的4 t伸縮臂越野叉車為對象,采用全電比例控制方式設計了叉車的行駛和工作裝置的控制系統;并依據課題組前期在工程機械裝備控制系統和參數監控系統的技術積累[7-13],設計了越野叉車的參數監控系統,為優化越野叉車控制系統性能提供可視化評價方法。
1 監控系統功能分析
1.1 越野叉車工作原理
4 t伸縮臂越野叉車可實現45°爬坡,可配置3節和4節伸縮臂,主要區別是伸縮臂結構不同,前伸距離和最大起升高度不同,如4節伸縮臂最大起升高度可達18 m。4 t伸縮臂越野叉車的結構如圖1所示,可分成伸縮臂工作裝置和底盤行駛系統兩大部分。工作裝置包括變幅、伸縮、貨叉調平和貨叉移動等4部分,與高空作業車一樣需要進行力矩安全限制。相比起重機聯合伸縮臂配的位移和舉升缸油壓的聯合判斷法,4 t叉車是通過測量后橋受力變化來判斷車輛安全狀態。底盤包括駕駛室、支腿、發動機、行駛系統、液壓主閥和配重等。其中,變量泵和變量馬達組成的行駛系統是越野叉車的關鍵點,有效分配泵馬達排量,關系到車輛的越野性能。

圖1 4 t越野叉車結構組成Fig.1 Structure composition of 4 t telehandler
1.2 控制系統組成
越野叉車的控制系統由伸縮臂工作裝置、行駛系統、發動機和儀表4部分構成,通過CAN總線交互數據,如圖2所示。
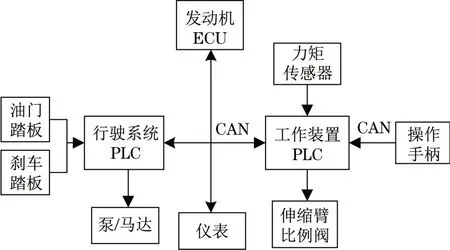
圖2 越野叉車控制系統Fig.2 Schematic of telehandler control system
工作裝置是通過電液操作手柄操控,在力矩傳感器的保護下讓工作臂在安全范圍內作業,其力矩限制原理是確保重心落在4個車輪內。行駛系統的輸入主要是油門和剎車踏板,并且設有1擋低速(0~12 km/h)和2擋高速(0~37 km/h),以滿足作業和轉場要求。工作裝置、行駛系統與發動機均通過CAN總線進行數據交互,從而通過CAN總線可有效了解越野叉車作業狀態和工況。
1.3 監控方案
在新產品開發中,須進行產品的性能測試,完善所必需的設計和調試。盡管伸縮臂越野叉車有顯示系統,但其主要目的是標定和顯示力矩傳感器,以及顯示整機的基本工作參數,難以為整機的故障診斷、系統優化等提供完整參數。
鑒于工作裝置和行駛系統均采用PEAK CAN模塊進行程序下載,若能將下載工具與參數監控結合,將該系統調試和優化更為方便。為此,采用LabVIEW作為開發平臺,個人計算機(PC)通過CAN卡與車輛CAN網絡通信,系統方案如圖3所示。其中通信線纜符合CAN通信標準,開發的監控系統在PC端運行,通過對特定報文數據的解析,實現越野叉車整車工作參數的狀態監控和性能分析,為系統的優化設計提供依據。
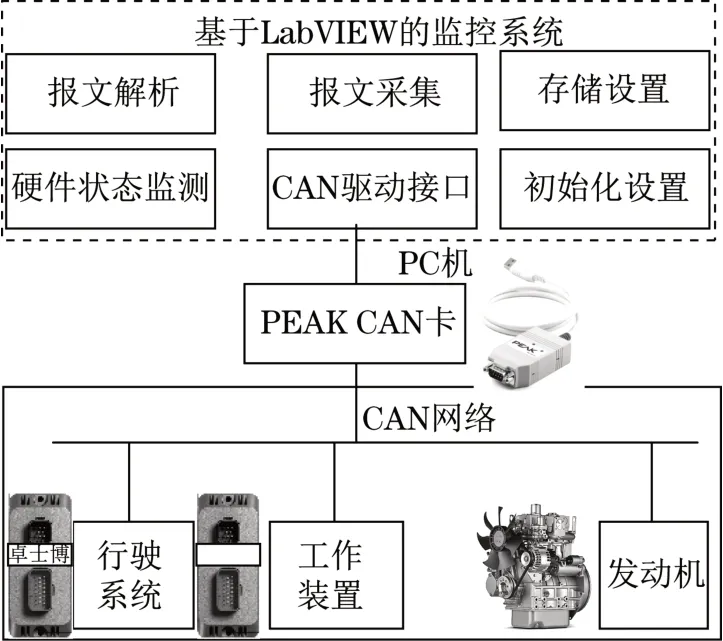
圖3 監控系統方案Fig.3 Monitoring system composition
2 監控系統軟件設計
2.1 軟件架構
為滿足越野叉車的狀態參數監控和功能擴展要求,本次設計延續了前期柔性化測控系統的理念[9],借助隊列、全局變量和多線程的技術,實現報文數據的采集、解析和曲線顯示,以及數據存儲和參數報警等功能。隊列是確保數據采集與數據解析、曲線顯示處理分開,以保證系統運行的實時性,避免出現數據擁堵;全局變量可以將解析的數據在曲線顯示、數據存儲和參數報警模塊中進行共享;運用多線程可滿足多個任務分時運行,確保系統的靈活性。
為說明隊列和多線程在系統設計中的作用,圖4給出了系統中原始報文到終端的數據流。當PEAK CAN收到報文后,隊列模塊會將所有報文壓入隊列,然后在報文解析模塊中對緩沖數據進行解析并釋放緩沖區。數據解析是按照已經定義好的參數來逐個對報文進行比對和解析,然后將參數定義中的參數內容按照順序存入AI_Data數組。而后續的參數顯示、曲線顯示和數據存儲則按照通知形式來實現數據的定時更新。圖4中各個模塊均在不同的循環內,即各自線程中運行,通過全局變量進行數據共享,如Stop來實現停止,AI_Data來實現參數交互。
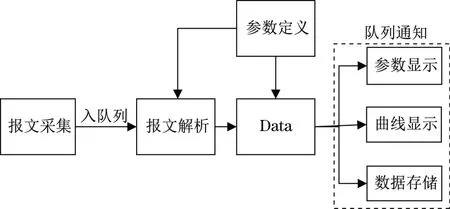
圖4 數據傳遞流程Fig.4 Data transferring process
2.2 隊列模塊設計
監控系統中采用了隊列的異步處理和消息通信2大功能,異步處理是將報文采集與報文解析分開,實現異步處理;消息通信用于參數顯示、曲線顯示、數據存儲和報警等功能模塊,實現定時更新。隊列主要包括隊列初始化、出入隊列和注銷隊列等3大模塊,隊列初始化是為各個隊列變量定義其匹配的數據類型和隊列形式;入隊和出隊,則分別是向隊列(或隊列通知)變量寫入數據以及讀隊列(或隊列通知)中變量的數據;而注銷隊列是在系統結束時將初始化隊列中所有變量注銷。
以隊列初始化為例,如圖5所示,前3個模塊是Obtain Queque函數,用于報文解析、曲線顯示和保存模塊的隊列。報文采集的隊列名為CAN Frame que,其變量格式與CAN報文一致,但由于需要存儲多個報文,因此這是一個結構體數組變量。后面的Notifier變量是通知信息,通過Obtain Notifier進行消息通知,實現曲線數據更新等定時操作功能。
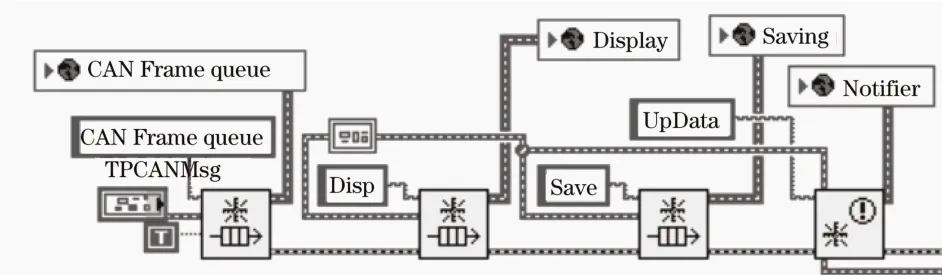
圖5 隊列初始化后面板Fig.5 Queue initialization function
2.3 報文解析
報文解析是按照物理參數所在報文的位置逐步解析,接收的報文CAN_MSG變量包括ID和幀數據Data_array,如圖6所示。如果解析的參數已定義,則根據其數據起始位Start_bit、數據位長度number_of_bit、數 據 類 型data_type、數 據 模 式Byte_order(大端或者小端模式)、數據比例系數a和b,解析參數后獲得參數數據值value。以泵比例閥電流為例,該參數位于16#101報文的第1和2字節,為此判斷接收的CAN_MSG報文是否存在101報文;若有,則取出該報文中的第1和2字節,計B1和B2,按照小端模式方式進行數據拼接,獲得比例閥電流為B1+B2×256。按照這個規則將所有物理參數進行解析。
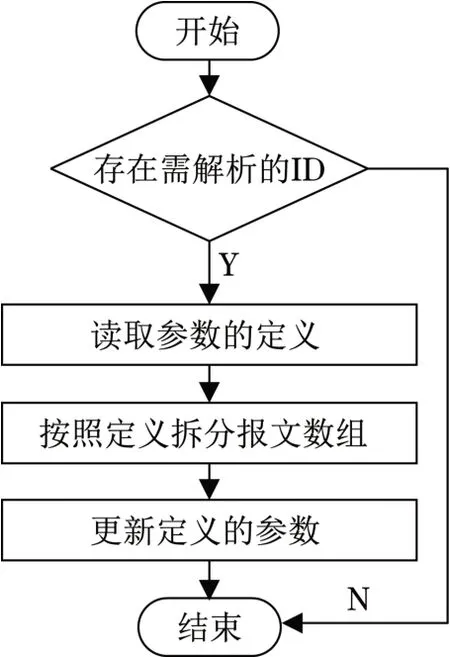
圖6 報文解析流程Fig.6 CAN frame parsing flow chart
參數顯示則是通過隊列通知來實現,如圖7所示,參數顯示分配到一個while循環中,并通過全局變量stop來控制參數顯示模塊的啟停。如果接收到通知,則更新通知里的數據變量AI_Data,相關的參數定義則根據參數序號進行一一解析。如發動機的故障碼SPN和FMI分別位于參數定義的78和79號,則直接通過索引即可獲得它們的參數。
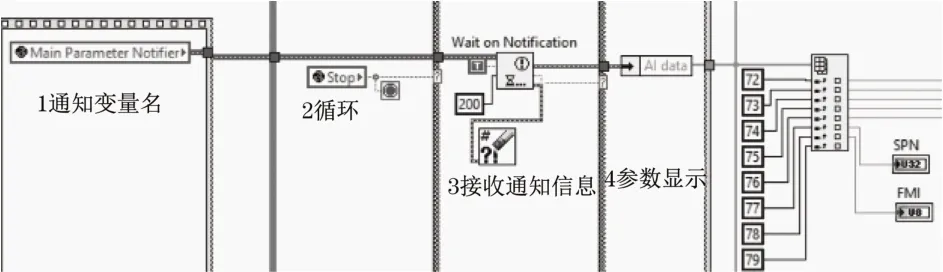
圖7 參數解析Fig.7 Parameters parsing from queue
3 監控系統功能試驗
將設計的監控系統部署在個人計算機上,通過USB PEAK CAN卡與4 t伸縮臂越野叉車連接,分別在正常和故障越野叉車上進行功能試驗,從而確定故障源。
3.1 參數監控功能試驗
越野叉車涉及行駛系統、工作裝置和發動機等3大裝置,僅發動機的J1939協議就包含很多報文,因此總線上的數據量比較大。按照車輛運行參數監控和故障診斷的思路,系統選擇了17個報文,共110個參數,部分參數定義見表1,所有解析的報文均為標準幀,數據模式是小端模式。
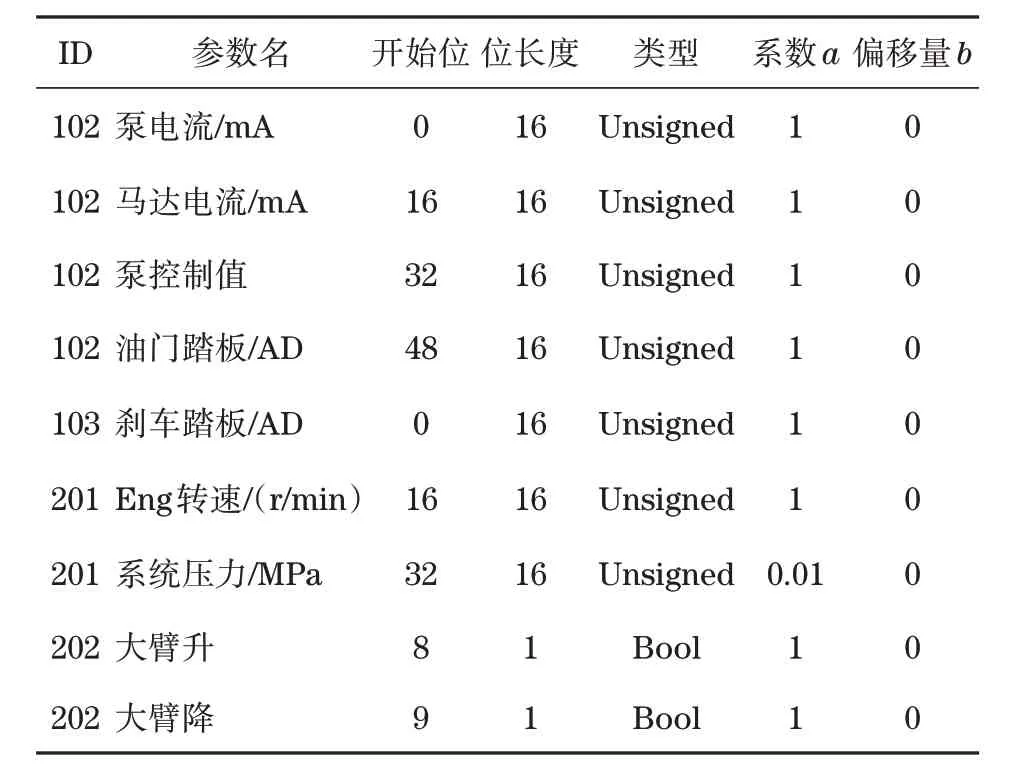
表1 部分報文參數定義表Tab.1 CAN frame parameters define table
通過CAN總線與叉車連接后,啟動越野叉車,發動機擴展幀報文與行駛控制器和工作控制器的標準幀報文合并后,報文總數量超過50個ID,數據量大。
設置行駛擋位為1,方向為前進,進行測試,測試結果如圖8所示。從圖中可知:目前支腿已經收起,符合行駛條件;系統檢測到了前進和1擋的行駛條件,但車速仍為0,其原因是當前發動機轉速僅為999 r/min,處于低帶速狀態,行駛系統不能工作。從以上信息可知,設計的監控系統能正確的解析報文,實現了越野叉車的參數監控功能。
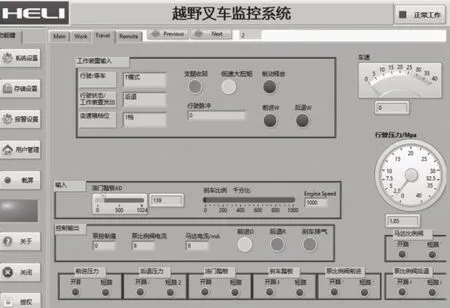
圖8 參數監控結果Fig.8 Monitor result of telehandler
3.2 故障診斷功能
參數監控系統的一個主要功能是故障排查。某樣機車速不平穩,無法實現高速行駛,且阻力較大,行駛有頓挫感。為此,分別對比了正常機型故障機型的行駛系統壓力曲線。
叉車的原地轉向阻力較大,采用該工況進行對比試驗。圖9為性能良好的叉車在原地轉向時進行后退和前進的壓力曲線,行駛系統壓力在8~10 MPa,變化平穩。圖10為故障車行駛系統的壓力曲線,系統壓力波動大,并存在溢流狀態,表明泵和馬達是正常工作,但存在大的行駛阻力,初步懷疑是行走系統被鎖住,導致車速無法提升,壓力波動。
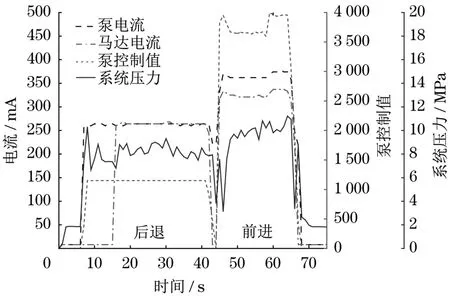
圖9 正常設備原地轉向的測試結果Fig.9 Travel pressure for normal telehandler insitu steering
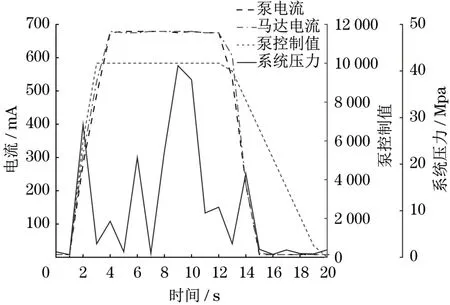
圖10 故障車行駛壓力變化曲線Fig.10 Travel pressure for faulty telehandler insitu steering
經過對液壓系統和機械結構的輔助判斷,懷疑是剎車油路存在空氣,導致液壓系統油溫高后因氣體膨脹而觸發制動,導致行駛時阻力太大,出現系統溢流和較大的壓力波動。為此,去掉制動系統的油路并進行行駛測量,故障車的車速正常,表明制動阻力已經釋放,說明參數監控系統為叉車的故障診斷提供了科學依據。
4 結語
針對伸縮臂越野叉車的運行狀態、故障診斷等功能要求,采用LabVIEW為軟件平臺,PEAK USB/CAN為硬件平臺,通過隊列、全局變量和多線程等技術完成了越野叉車的參數監控系統的開發,通過實驗測試,系統功能良好。將設計的系統用于故障車輛監控,快速發現了越野叉車的故障源,為叉車工作過程中的故障診斷提供了可視化的判斷方法。采用CAN總線監控方式有效實現了車輛狀態監控和故障診斷,但仍依賴于個人電腦,后期可以考慮物聯網技術,通過藍牙/WIFI來獲得車輛信息,為改進越野叉車性能奠定基礎。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32