二維伺服系統旋變解碼電路設計
2022-09-14 08:20:10吳建剛楊紅霞馬俊安劉勝魁
電子設計工程 2022年17期
吳建剛,楊紅霞,馬俊安,劉勝魁
(四川航天電子設備研究所,四川成都 610100)
隨著精確制導技術不斷發展,導引頭技術越來越受到重視[1]。雷達伺服系統是反艦導彈導引頭的重要組成部分,它對于發現目標、跟蹤目標以及精確測量目標位置都起著重要作用,它的精度直接影響到反艦導彈的制導精度[2-3]。伺服系統的定位精度主要取決于角度傳感器的精度,常見的角位置檢測傳感器有光電編碼器、磁編碼器以及旋轉變壓器。相比于其他兩種類型的傳感器,旋轉變壓器具有耐污染、抗震動、抗電磁干擾、壽命長,在惡劣環境下可靠工作的優點[4-6]。
由于旋轉變壓器直接輸出的是模擬電壓信號,需要經過模數轉換及解碼變為數字信號才能被處理器使用,所以,對于采用旋轉變壓器作為測角元件的伺服系統,模數轉換解碼電路和旋轉變壓器共同決定系統的定位精度。旋變解碼又稱為軸角解碼,主要有兩種方法[7-8]:一種是結合硬件調理電路,利用處理器運行軸角轉換計算軸角;另外一種是直接使用軸角數字轉換芯片(RDC)。RDC 芯片精度較高、外圍電路簡單,廣泛應用于現代雷達伺服測角系統。目前,應用于雷達導引頭伺服系統的旋變解碼電路普遍基于集成的RDC 芯片(AD2S1210),而該芯片驅動能力很小,微安級的驅動電流無法直接驅動旋轉變壓器工作,所以,對于RDC 芯片(AD2S1210)解碼電路,后端的驅動電路設計非常關鍵。劉偉奇等設計了基于AD2S83、AD2S99、OP279 和甲乙類放大電路組合的激磁放大電路,電路非常復雜[9];范濤等設計了高密度主控板,但側重于軟件解碼設計,并未給出高密度RDC 設計電路[10];郭晨霞等研究了低成本激磁電路,但主要采用分立器件來搭建[11];魏旭來選用AD823ARZ 和TCA0372 構成射隨緩沖,其驅動電流可達1 A,但電路設計復雜[12];文獻[13-20]研究較多的解碼驅動電路主要為分立器件組成的多級推勉放大電路,其電路復雜、規模較大,均不利于二維伺服系統的工程應用;文獻[21-23]采用集成運放驅動電路,但僅針對單軸設計;魏雅設計了雙軸解碼驅動電路,但仍采用分立器件搭建[24]。因此,該文設計開發了一款適用于小型雷達導引頭二維伺服系統的集成化共激磁放大電路。
1 旋轉變壓器測角原理
旋轉變壓器是一種輸出電壓隨轉子轉角變化的信號元件。當勵磁繞組以一定頻率的交流電壓勵磁時,輸出繞組的電壓幅值與轉角成正弦、余弦函數關系或線性關系。
工程上應用較多的是正余弦旋轉變壓器,其等效原理結構如圖1 所示,左側初級勵磁繞組輸入勵磁電壓,右側次級感應繞組反饋輸出兩相正交的電壓,大小與轉角成正余弦關系,故可以通過反饋正余弦電壓信號計算出其轉子位置數據。
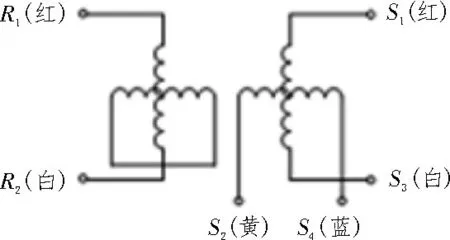
圖1 旋轉變壓器等效原理結構圖
其電壓換算關系為:
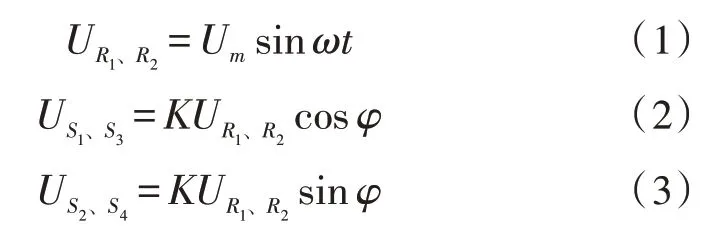
式中,Um為最大激磁電壓幅值;ω為激磁頻率;K為變比;φ為轉角;
由于旋轉變壓器(以下簡稱旋變)直接輸出的是模擬電壓信號,所以,需要經過模數轉換及解碼變為數字信號供處理器使用,信號轉換原理框圖如圖2所示。

圖2 信號轉換原理框圖
2 電路設計
2.1 RDC解碼芯片
AD 公司的AD2S1210 是一款高精度的集成RDC芯片,能夠為旋變提供所需的激磁信號。內部有一個伺服跟蹤環路,負責跟蹤輸入的正、余弦信號,并轉換為數字的位置。該芯片廣泛應用于直流和交流伺服電機控制領域。AD2S1210 的主要參數見表1。

表1 AD2S1210主要參數
2.2 AD2S1210接口電路
AD2S1210 是模數混合芯片,芯片工作時需要模擬AVDD+5 V、數字DVDD+5 V 以及邏輯數字+3.3 V三路電源供電。AD2S1210 芯片模擬端用于產生驅動旋變工作的激磁信號,同時接收旋變返回的正余弦信號,數字端與處理芯片FPGA 互連,FPGA 對其專用管腳進行配置操作,設置芯片的工作模式和激磁電壓頻率等,并接收其輸出的角度解碼數據。AD2S1210 具有串行和并行兩種通訊方式,為了減少外圍走線,該文采用SPI 串行方式。電路設計按照模數混合的電路設計原則進行設計,模數走線采用分開設計,模擬地線與數字地線通過磁珠單點相連。AD2S1210 接口電路原理框圖如圖3 所示。

圖3 AD2S1210接口電路原理框圖
2.3 激磁放大電路
雖然AD2S1210 產生激磁信號和處理正余弦信號非常方便,但該芯片驅動能力很小,微安級的驅動電流無法直接驅動旋變工作,所以,后端的激磁驅動電路設計非常關鍵,既影響信號的質量,又制約整個旋變解碼電路的集成化程度。常見的驅動電路多為分立器件組成的多級推勉驅動電路,電路復雜,可靠性低,已經無法適應微小型二維伺服系統的使用需求。
該文設計開發了一款基于雙路軌到軌功率運放FX2546(主要參數見表2)的激磁放大電路,實現了激磁放大電路的集成化。為了盡可能地精簡外圍電路,減小電源種類,設計時采用單電源供電。為了有效利用運放的最優線性段,實現信號全范圍放大,設計時將激勵信號參考電平偏置到供電電壓的一半附近。激磁放大電路的原理圖如圖4 所示,AD2S1210 輸出的激磁差分EXC 信號分別經過R3和R17連接運放負端,運放正端通過分壓電阻將電壓配置為一半的供電電壓,經放大后的激磁差分EXC_OUT 信號便可驅動旋變工作。工程應用時,還可根據需要靈活配置激磁信號電壓的放大倍數,以適應不同電壓的旋變使用。
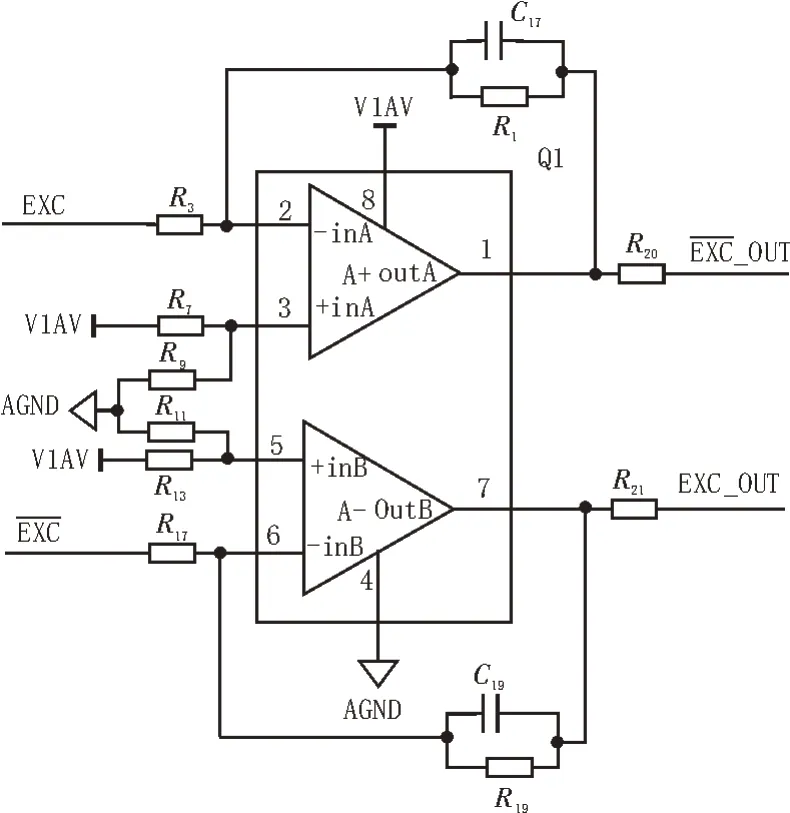
圖4 激磁放大電路原理圖

表2 FX2546主要參數
2.4 共激磁解碼電路
導引頭小型化低成本是未來發展的趨勢,如何充分利用已有資源,優化電路結構、實現電路的微小型化設計是工程應用需要重點解決的難題。該文設計的共激磁解碼電路可采用一路激磁放大電路同時驅動方位和俯仰兩維旋變,與分立器件組成的多級推勉驅動電路相比,元器件數量和電路PCB 面積分別縮小一倍以上,為導引頭伺服電路的微小型化設計提供了工程化途徑。
共激磁解碼電路的原理框圖如圖5 所示,方位AD2S1210 輸出的激磁信號經激磁放大電路放大后同時驅動方位和俯仰兩個旋變工作,旋變輸出的正余弦信號分別輸入各自的AD2S1210 解碼芯片。由FPGA 對解碼芯片進行配置,并通過SPI 串口接收解碼后的角度數據。為保證共激磁設計時兩維激磁信號相位的一致性,由FPGA 進行時序控制確保兩維解碼芯片同步復位,采用同源晶振經時鐘驅動芯片后供兩維解碼芯片使用。

圖5 共激磁解碼電路原理圖
3 試驗測試
3.1 測試系統
對設計完成的產品進行了實物測試,搭建的測試系統(如圖6)由上位機、集成控制驅動器(包括控制電路、角度解碼電路和電機驅動電路)以及執行機構組成[25]。所選旋變型號及主要參數如表3 所示。
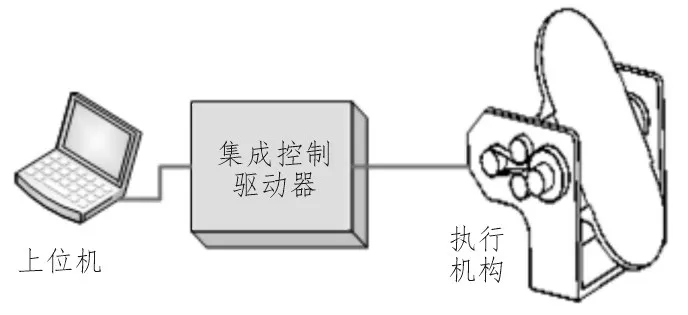
圖6 測試系統

表3 J45XF20旋變主要參數
3.2 波形測試
該文設計的共激磁旋變解碼電路使用的是方位維AD2S1210 輸出的激磁差分信號,經激磁放大后同時驅動方位維和俯仰維兩路旋變,然后將旋變輸出的正余弦信號輸入各路AD2S1210 進行解碼。對于俯仰維測角而言,如果兩維AD2S1210 分別產生的激磁信號相位一致性較差,則會影響俯仰維旋變角度解碼的正確性。所以,需要對方位維和俯仰維AD2S1210分別產生的激磁信號相位進行測試,測試結果如圖7所示,方位維和俯仰維激磁波形基本重合,相位差在10°以內,符合AD2S1210 手冊44°以內的相位差要求,激磁信號輸出波形符合設計預期。

圖7 方位維和俯仰維AD2S1210產生的激磁信號波形
3.3 系統測試
旋轉變壓器解碼電路屬于模數混合電路,電路設計裕度是否夠用,通常可通過溫度循環測試進行考核。在常溫系統測試的基礎上,將被測產品放入高低溫循環試驗箱中,按要求完成了溫循試驗(-40~+60 ℃)。在常溫、低溫和高溫測試過程中,系統各流程正常工作,預置角度流程數據截圖分別見圖8-10,在角度預置過程中角度輸出連續平滑無畸點,預置到位后,角度平穩無波動。

圖8 常溫預置角度數據截圖

圖9 低溫預置角度數據截圖
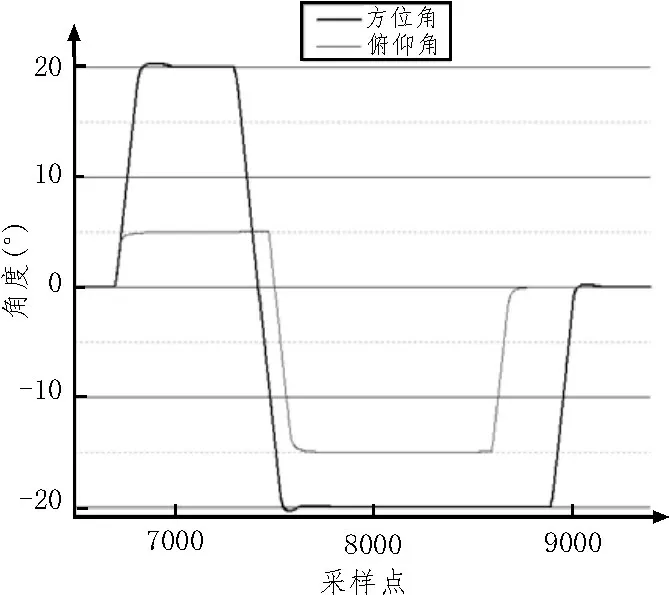
圖10 高溫預置角度數據截圖
測試數據表明,設計完成的共激磁旋變解碼電路及伺服系統工作穩定可靠,適用于導引頭伺服系統工作環境。
4 結束語
文中設計開發的二維伺服系統旋轉變壓器解碼電路,集成化程度高,適應了彈載雷達導引頭小型化低成本的發展需求。文中介紹了集成化激磁電路和適用于二維伺服系統的共激磁放大電路設計。通過溫循試驗,驗證了該電路的可靠性和穩定性,實現了集成化和小型化二維伺服系統旋變解碼電路的工程化設計。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
