挖掘機工作裝置復合動作性能提升分析與試驗
2022-09-19 06:57:00劉志東王青云魏志民常文爽
機床與液壓 2022年16期
劉志東,王青云,魏志民,常文爽
(天津中德應用技術大學汽車與軌道交通學院,天津 300350)
0 前言
近年來,隨著國家“一帶一路”戰略的實施,挖掘機在基礎設施建設方面仍有較大的市場需求空間。國內外大型液壓挖掘機作業質量的重要指標是系統可靠性和平穩性,由于經常進行啟動、換向、制動操作,導致液壓系統外負載變化較大,振動與沖擊明顯,嚴重影響挖掘作業的協調性。而挖掘機液壓系統的性能不僅與零件的可靠度、整機的安裝等有關,還與系統的匹配程度有關。挖掘機對動臂、斗桿、鏟斗等執行機構負載復雜性及動作協調性要求較高。因此,分析工作裝置液壓系統的協調性對大型液壓挖掘機液壓系統的設計制造具有重要意義。隨著檢測技術的發展,通過對現有挖掘機液壓系統進行試驗分析,結合數據對比和駕駛員操作反饋,逆向修正和優化液壓系統,對降低開發成本和縮短周期效果明顯。
本文作者以液壓系統的區別為分析點,采用在挖掘機液壓系統和動力臂相應位置布局檢測傳感器的方式,對同等負載等級的3臺大型液壓挖掘機進行工作裝置復合動作的對標試驗。結合數據采集和統計結果,分析挖掘機液壓系統流量分配特性對工作裝置復合動作性能提升的影響。根據分析結果對某一挖掘機進行液壓系統改進前、后的復合動作性能試驗,從而總結出工作裝置液壓系統的較佳匹配方式,為設計人員提供參考。
1 對標試驗方法
挖掘機工作裝置包括動臂、斗桿和鏟斗3個機構,每個機構均由液壓缸驅動,3個工作機構可以單獨動作,也可以同時動作。在挖掘機工作時,為充分利用發動機功率、提高作業效率,通常要求多個機構進行復合動作,相互配合,其中,動臂、鏟斗、斗桿在挖掘過程中的復合動作頻繁、消耗能量大。駕駛員通過操縱手柄控制多路閥的閥芯開度來控制挖掘機的工作裝置運動,實現挖掘作業。
為能夠對挖掘機液壓系統工作數據進行試驗采集,需要在各檢測位置安裝相應的傳感器,通過傳感器數據,分析操作過程、液壓系統參數變化、工作裝置運動之間的協調性。
1.1 傳感器布局
根據挖掘機液壓系統及結構組成,需要對相關數據進行實時采集,傳感器布局如圖1所示。由便攜式數據采集設備對相應傳感器的數據進行實時采集,傳感器包括:動臂、斗桿、鏟斗驅動液壓缸上安裝的0~2.5 m拉繩位移傳感器,用于進行伸縮位移的實時檢測;在主泵1、2的出口測壓孔位置和動臂、斗桿、鏟斗各驅動液壓缸大小腔的入口管路上安裝的0~45 MPa壓力傳感器;液壓油箱和主泵1、2之間分別安裝的1~250 L/min齒輪流量計;先導操作閥組處安裝的0~10 MPa先導壓力檢測傳感器。

圖1 傳感器布局
1.2 試驗方法
挖掘機工作裝置在挖掘過程中的復合動作過程:動臂、鏟斗、斗桿3個液壓缸由全收縮狀態,經同步操作,直到3個液壓缸都到達全伸出狀態。
根據挖掘機左右手柄功能,同時操作左先導閥水平向后移動進行斗桿收回、右先導閥向左后方45°角移動,控制動臂提升、鏟斗挖掘。左右手柄由初始狀態同時移動到先導閥極限位置的過程,挖掘機工作裝置由全伸狀態運動為動臂提升極限、斗桿和鏟斗全收縮狀態,如圖2所示。

圖2 試驗操作狀態
2 試驗數據采集與分析
2.1 數據分析方法
液壓系統中的壓力、流量、位移信號屬于低頻信號,選擇10 ms的采樣周期足以保證采集到的信號不失真。將參與試驗的3臺大型液壓挖掘機型號分別定義為A、B、C型。
挖掘機在挖掘過程中,在動臂提升且斗桿和鏟斗收縮的復合動作中,數據分析以先導壓力開始上升的時間作為起始時間點,分別以動臂油缸、斗桿油缸和鏟斗油缸開始緩沖的時間點作為動臂提升完成、斗桿和鏟斗收縮完成的時間點,統計各動作所用時間。分別統計動臂提升和鏟斗收縮的時間差值、動臂提升和斗桿收縮的時間差,以及各液壓缸在不同計時節點處的伸出行程比例,結合液壓系統的實時壓力和流量數據信息,分析由液壓系統的區別而導致的工作裝置復合動作協調性的差異。
2.2 工作裝置運動時間
工作裝置各驅動液壓缸的尺寸如表1所示。可知:B型挖掘機動臂和斗桿的缸徑最大,因此負載也最大。

表1 液壓缸尺寸(缸徑×桿徑×行程) 單位:mm
運動時間和液壓缸位移比例統計分別如表2、3所示。可知:B型挖掘機動臂與鏟斗運動時間差最小,A型挖掘機最大。根據駕駛員土方挖掘經驗,挖掘過程中動臂和鏟斗運動同步性越高,操作舒適性、協調性越好。
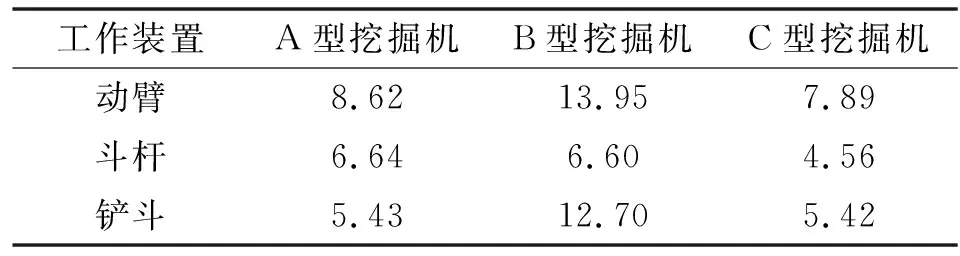
表2 改進前工作裝置運動時間 單位:s

表3 改進前工作裝置位移比例
任一液壓缸達到全伸狀態作為第一時間點,A型挖掘機鏟斗液壓缸先到達到全伸狀態,B、C型挖掘機斗桿液壓缸先達到全伸狀態。在第一時間點,A、B、C型挖掘機動臂液壓缸的伸出比例分別為4.5%、23.6%、1.4%。
兩個液壓缸達到全伸狀態作為第二時間點,A、B、C 3臺挖掘機都是斗桿和鏟斗液壓缸先達到100%的全伸狀態,此時,動臂液壓缸的伸出比例分別為21.9%、53.6%、13.2%。
由以上分析可知,B型挖掘機在工作裝置復合動作中,動臂一直保持穩定的提升狀態,而A、C型挖掘機在鏟斗液壓缸未達到全伸狀態時,動臂提升很小,幾乎無動作。
2.3 液壓系統數據對標
圖3所示為A、B、C 3臺大型挖掘機工作裝置復合動作周期中液壓系統參數及液壓缸位移數據采集對標結果。
動臂大腔、斗桿大腔、鏟斗大腔流量,根據公式(1)和(2)可求得:
=d/d
(1)
(2)
其中:為液壓缸的位移;為位移對時間求導得到的實時運動速度;為液壓缸活塞的直徑;為液壓缸大腔流量。基于MATLAB的液壓缸流量計算程序如下:
%三個液壓缸的活塞面積,單位m
A_boom=3.14*D_boom*L_boom/4;
A_arm=3.14* D_ arm*L_ arm/4;
A_bkt=3.14* D_ bkt *L_ bkt/4;
%三個液壓缸的伸縮速度,單位m/s
v_boom=[diff(S_boom),0];
v_arm=[diff(S_arm),0];
v_bkt=[diff(S_bkt),0];
%三個液壓缸的大腔流量,單位L/min
F_boom=v_boom*A_boom*1000*100*60*2;
F_arm=v_arm*A_arm*1000*100*60;
F_bkt=v_bkt*A_bkt *1000*100*60;
其中:A_boom、A_arm、A_bkt分別為動臂、斗桿、鏟斗液壓缸的活塞面積;D_boom、D_ arm、D_ bkt分別為動臂、斗桿、鏟斗液壓缸的活塞直徑;S_boom、S_arm、S_bkt分別為動臂、斗桿、鏟斗液壓缸的伸縮位移;v_boom、v_arm、v_bkt分別為動臂、斗桿、鏟斗液壓缸的伸縮速度;F_boom、F_arm、F_bkt分別為動臂、斗桿、鏟斗液壓缸的大腔流量。
3臺挖掘機液壓系統對主泵1、2的流量分配設計相同,即動臂提升和斗桿回收由主泵1、2進行閥內合流供應,鏟斗運動所需流量由泵2提供。
工作裝置復合動作試驗以手柄先導閥壓力上升為起點,以各液壓缸開始緩沖時間點為終點。由圖3可知,A型和C型挖掘機在工作裝置復合動作過程中,主泵出口壓力和各工作腔入口壓力有明顯波動,主泵1、2的流量優先流向斗桿和鏟斗液壓缸,當鏟斗液壓缸完全伸出時,主泵流量會瞬間分流給動臂提升運動,由于主泵流量供應瞬間切換,造成整車晃動明顯,復合運動協調性差,降低了駕駛員的操作舒適性和效率。而B型挖掘機主泵出口壓力和各工作腔入口壓力數據曲線穩定,同步率高,動臂和鏟斗同步協調運動,保持了穩定流量供應。當斗桿液壓缸伸出至緩沖位置時,泵2流量進行了2次有效的調節,保證對動臂和鏟斗液壓缸的流量供應,延續之前的穩定運行速度,沒有出現明顯的頓挫現象,增強了工作裝置運動的協調性,駕駛員不必通過頻繁調整操作手柄實現有效的挖掘工作,操作舒適性強。
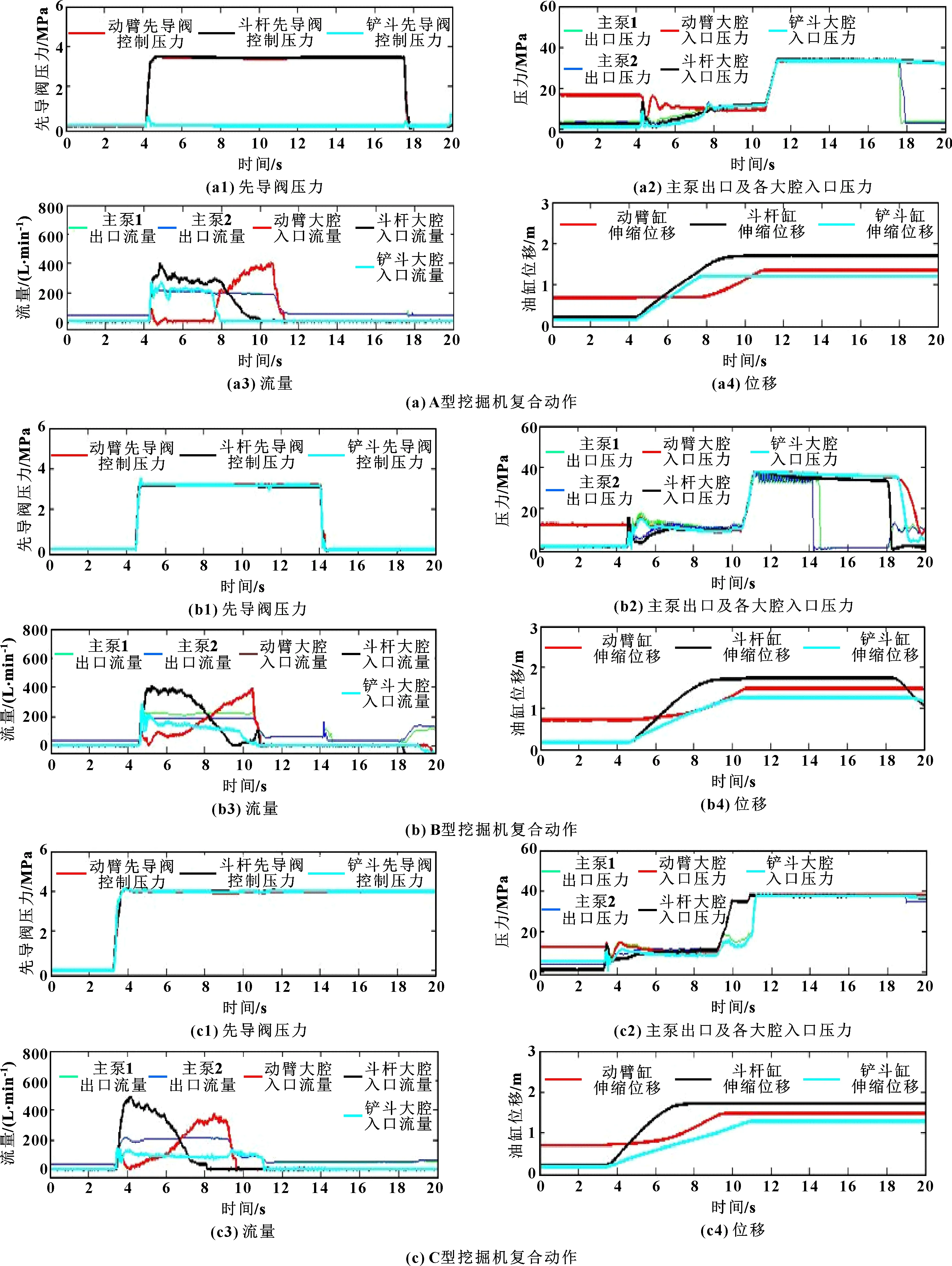
圖3 采集到的液壓系統及液壓缸位移數據
3 液壓系統改進試驗
動臂提升、斗桿收縮和鏟斗收縮復合動作多用于挖掘作業的后半段,根據試驗數據分析,結合挖掘機液壓系統原理圖可知,由于A型和C型挖掘機沒有鏟斗大腔限流功能,在動臂和鏟斗同時動作時,動臂提升需要較大的壓力,泵2的流量優先供應鏟斗翻轉,導致鏟斗液壓缸快速伸出,而動臂幾乎無動作。液壓挖掘機屬于典型多執行器系統,其典型特點是多執行器并行動作及負載頻繁變化,這就要求其液壓系統必須具有較好的流量分配特性。參照B型挖掘機液壓系統特點,以A型挖掘機液壓系統為改進對象,增加鏟斗大腔限流功能,限制泵2對鏟斗的流量供應,分流出部分流量用于動臂提升;同時,在動臂大腔和斗桿大腔之間增加了斗桿調速閥,實現斗桿調速功能。改進后的液壓系統如圖4所示。

圖4 改進后的A型挖掘機液壓系統
對A型挖掘機液壓系統進行改進后,以同樣的復合動作操作標準,由同一名駕駛員進行工作裝置復合運動試驗,現場試驗過程如圖5所示。

圖5 復合動作試驗現場
根據液壓系統改進前、后的數據采集結果,得出各液壓缸實時的大腔流量和液壓缸位移數據如圖6 所示。可知:液壓系統改進后,由先導操作開始,動臂液壓缸即獲得穩定的流量供應,斗桿達到全伸狀態后,泵2流量進行了2次有效的調節,使動臂液壓缸流量保持相對穩定,避免出現流量的瞬間增大,造成整車晃動;鏟斗大腔流量供應受到限制,保持穩定運動,與動臂提升同步性增強,更符合挖掘作業過程運動規律,明顯提高了工作裝置復合動作協調性。

圖6 液壓系統改進前后的試驗數據
液壓系統改進設計后,工作裝置液壓缸的運動時間和伸出位移分別如表4、表5所示。可知:動臂、斗桿、鏟斗液壓缸的運動時間分別為13.95、6.60、12.70 s,動臂與鏟斗運動時間差為1.25 s;在第一時間點,斗桿液壓缸先達到全伸狀態,動臂液壓缸的伸出比例為24.5%,比改進前提高了20%;在第二時間點,動臂液壓缸的伸出比例為49.0%,比改進前提高了27.1%。
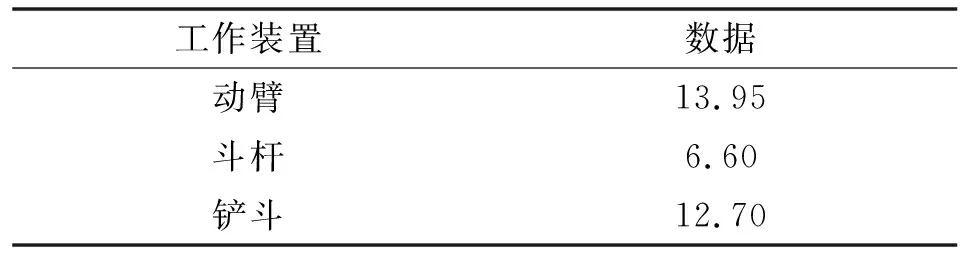
表4 改進后的液壓缸運動時間 單位:s
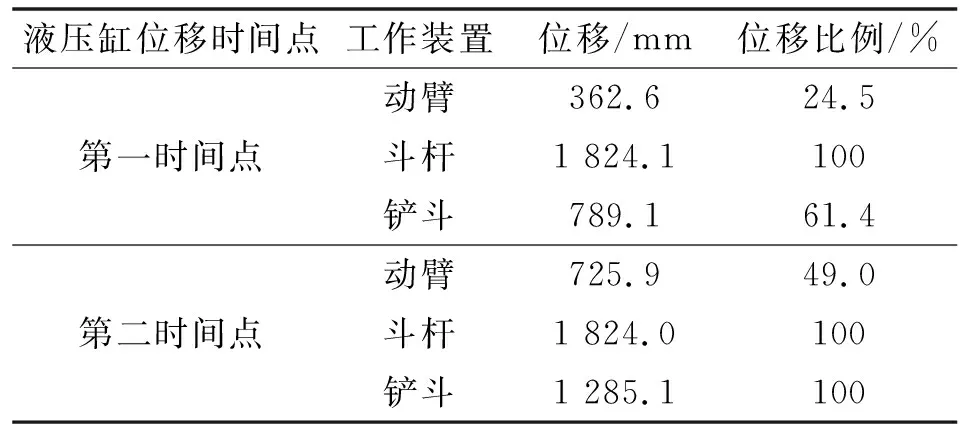
表5 改進后液壓缸位移比例
通過經驗數據可知,駕駛員實際的挖掘過程時間約為9~15 s,動臂和鏟斗復合動作時間的有效延長,可明顯提高操作的舒適性和作業效率,降低了由于某一工作裝置運動過快而導致駕駛員頻繁操作先導手柄進行作業調節而造成的駕駛疲勞,同時減小了由于整車重載結構頻繁晃動而造成的系統功率損失。
4 結語
本文作者針對挖掘機工作裝置復合動作協調性的差異,對3個品牌的大型挖掘機進行性能對標試驗。根據數據采集結果,采用MATLAB軟件對結構位移和液壓系統參數進行數據處理和分析,結合工作時間統計數據,總結出導致工作裝置復合動作協調性不同的原因。以某機型為例,對液壓系統進行改進設計,優化流量分配,驗證了增加鏟斗限流閥和斗桿調速閥對復合動作中,主泵流量的合理分配具有重要意義,可有效提高操作效率和舒適性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
家庭影院技術(2017年9期)2017-09-26 03:41:45
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
