一種新型智能導(dǎo)盲車的研究與開發(fā)
2022-09-19 04:40:50魏佳豪陳籽萌鄒思奇田豐源趙琳博謝印慶
物聯(lián)網(wǎng)技術(shù) 2022年9期
關(guān)鍵詞:單片機(jī)
周 帥,魏佳豪,陳籽萌,鄒思奇,田豐源,趙琳博,謝印慶
(大連理工大學(xué)城市學(xué)院,遼寧 大連 116600)
0 引 言
近年來(lái),盲人群體龐大,很多研發(fā)團(tuán)隊(duì)都在致力于導(dǎo)盲輔助相關(guān)設(shè)備的研究。國(guó)內(nèi)目前的研究方向是以導(dǎo)盲杖和導(dǎo)盲眼鏡為輔助工具,而國(guó)外的研究中心則是高端機(jī)器人。為此,本文研發(fā)了一輛以單片機(jī)為主硬件基礎(chǔ)并與軟件相結(jié)合的智能導(dǎo)盲車。該導(dǎo)盲車主要實(shí)現(xiàn)隨著環(huán)境的變化提供照明、遇到障礙物時(shí)語(yǔ)音提醒以及避障路徑檢測(cè)和實(shí)時(shí)定位的功能。
1 系統(tǒng)結(jié)構(gòu)設(shè)計(jì)與功能
智能導(dǎo)盲車運(yùn)用STM32單片機(jī)作為主硬件基礎(chǔ),在此基礎(chǔ)上添加各種模塊集成,并與軟件相結(jié)合,進(jìn)而實(shí)現(xiàn)對(duì)智能導(dǎo)盲車性能需求的研究。系統(tǒng)結(jié)構(gòu)如圖1所示。
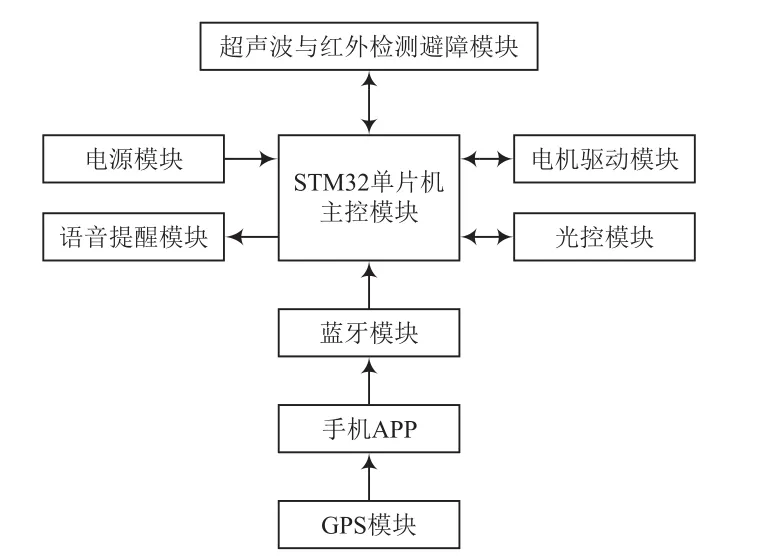
圖1 導(dǎo)盲車結(jié)構(gòu)
系統(tǒng)的超聲波模塊是主要的避障模塊,它實(shí)現(xiàn)對(duì)前方障礙物的感知并測(cè)距避障。GPS模塊實(shí)現(xiàn)對(duì)小車的定位。電源模塊為整個(gè)系統(tǒng)提供能量。語(yǔ)音提醒模塊實(shí)現(xiàn)遇到障礙物時(shí)的報(bào)警功能。紅外避障模塊實(shí)時(shí)進(jìn)行路徑檢測(cè)并實(shí)現(xiàn)對(duì)車身左右的障礙物進(jìn)行避障。主控模塊是STM32單片機(jī),同時(shí)也是整個(gè)硬件系統(tǒng)的核心,它可以實(shí)時(shí)處理傳感器傳輸過(guò)來(lái)的數(shù)據(jù),并根據(jù)所指示的命令做出應(yīng)答。電機(jī)驅(qū)動(dòng)模塊為導(dǎo)盲車提供機(jī)械能,使其具有機(jī)動(dòng)性。光控模塊對(duì)盲人出行時(shí)的環(huán)境進(jìn)行判決和照明。藍(lán)牙模塊實(shí)現(xiàn)單片機(jī)與手機(jī)間的通信,運(yùn)用手機(jī)與導(dǎo)盲車相連接并操縱。
2 主要硬件模塊
2.1 主控模塊
以STM32F103ZE單片機(jī)作為主硬件控制系統(tǒng),目前市面上多應(yīng)用51單片機(jī)和15單片機(jī)。從盲人行進(jìn)安全系數(shù)等方面考慮,導(dǎo)盲車需要實(shí)現(xiàn)多種功能,保證數(shù)據(jù)信息采集的效率,因此對(duì)單片機(jī)的運(yùn)行性能要求較高。文中選用STM32單片機(jī)作為導(dǎo)盲車的主控芯片。STM32單片機(jī)資源豐富,可容納數(shù)百千字節(jié)的程序,也可移植RTOS、GUI中間件,時(shí)鐘頻率快、I/O口多、庫(kù)函數(shù)豐富,能夠滿足幾乎全部的應(yīng)用需求。
2.2 超聲波避障模塊
避障模塊使用超聲波HC-SR04傳感器。該模塊的避障效果優(yōu)越,使用直流5 V電壓,遠(yuǎn)可在2~450 cm范圍內(nèi)探測(cè)出與障礙物的距離,如2 cm超近盲區(qū)等。超聲波避障的工作過(guò)程:模塊的發(fā)送端發(fā)出超聲波時(shí),定時(shí)器中斷開啟;當(dāng)觸碰到障礙物時(shí)返回到接收端,定時(shí)器中斷就立即停止計(jì)時(shí),經(jīng)過(guò)接收電路放大和整形后返回到單片機(jī)主控模塊。工作框圖如圖2所示,測(cè)距是根據(jù)超聲波在空氣中的傳播速度=340 m/s,記錄高電平持續(xù)的時(shí)間,與障礙物距離=/2。為了實(shí)現(xiàn)模塊的避障功能,主要是在單片機(jī)所對(duì)應(yīng)軟件程序里設(shè)置一個(gè)的最大閾值,當(dāng)設(shè)定的值小于閾值時(shí),此時(shí)數(shù)據(jù)回歸到單片機(jī),使小車做出相應(yīng)的判斷以躲避障礙物,同時(shí)也會(huì)發(fā)出語(yǔ)音報(bào)警,提醒盲人當(dāng)前遇到障礙物。

圖2 超聲波工作流程
2.3 GPS模塊
本設(shè)計(jì)所用的GPS模塊為TTL-LEA,是一款簡(jiǎn)單方便、實(shí)用易用的嵌入式開發(fā)的GPS模塊,具有-144 dBm信號(hào)靈敏度、120 mW的極低功耗,使用方便。定位精度高達(dá)2.5 m,擁有標(biāo)準(zhǔn)SMA有源天線接口,支持NMEA-0183、UBX二進(jìn)制通信協(xié)議;采用U-BLOX第五代GPS引擎,精度高、抗漫反射、抗干擾能力強(qiáng)。同時(shí),該模塊在連接GPS模塊后無(wú)須附加設(shè)備即可實(shí)現(xiàn)定位功能。
2.4 紅外避障模塊
本文的紅外避障模塊采用HCRT5000紅外傳感器,該傳感器對(duì)外界光線有較好的適應(yīng)能力,測(cè)距速度快。具有成本低、體積小、使用方便、檢測(cè)精度高等優(yōu)點(diǎn)。將紅外傳感器分別放于導(dǎo)盲車的左右兩端,用來(lái)感知左右兩側(cè)的障礙物。當(dāng)左側(cè)紅外傳感器感知到障礙物時(shí),傳感器的接收端將信號(hào)傳輸?shù)絾纹瑱C(jī)中,通過(guò)與設(shè)定的軟件系統(tǒng)的程序相結(jié)合進(jìn)行判斷,從而使車右轉(zhuǎn)。同理,當(dāng)右側(cè)紅外傳感器感知到障礙物時(shí)車會(huì)左轉(zhuǎn),兩側(cè)無(wú)障礙物時(shí)會(huì)前進(jìn),左右均有障礙物時(shí)車會(huì)后退并右轉(zhuǎn)。程序設(shè)計(jì)流程如圖3所示。
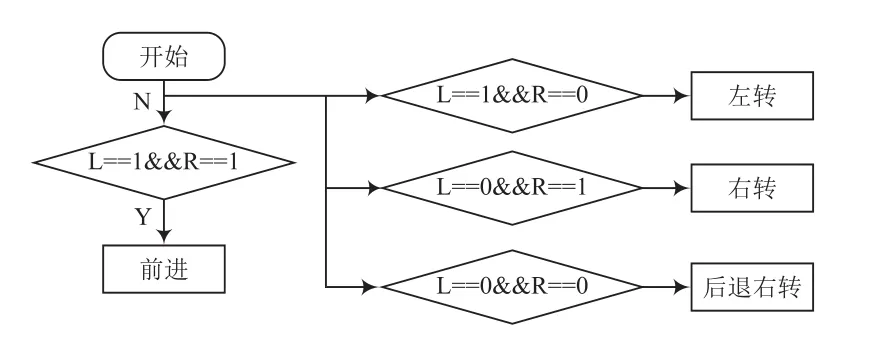
圖3 紅外避障程序流程
2.5 藍(lán)牙模塊
本設(shè)計(jì)使用HC-05藍(lán)牙模塊,采用非常快速的連接方式,就可以進(jìn)行短距離數(shù)據(jù)間的傳輸。當(dāng)前市面上也有通過(guò)WiFi模塊與硬件設(shè)備相連接的情況。但考慮到藍(lán)牙不需要依靠網(wǎng)絡(luò),且HC-05藍(lán)牙模塊具有功耗小、價(jià)格低廉、響應(yīng)快、穩(wěn)定性好、使用簡(jiǎn)單等優(yōu)點(diǎn),僅占用單片機(jī)的一個(gè)串口,再通過(guò)藍(lán)牙通信技術(shù),就可以實(shí)現(xiàn)硬件設(shè)備與手機(jī)相連接。
2.6 電機(jī)驅(qū)動(dòng)模塊
在導(dǎo)盲車的兩端各安裝一個(gè)步進(jìn)電機(jī)充當(dāng)車輪,并通過(guò)單片機(jī)調(diào)節(jié)PWM的占空比和脈沖信號(hào)的頻率,控制兩個(gè)車輪的速度,速度不同時(shí)導(dǎo)盲車進(jìn)行左右轉(zhuǎn)彎,速度相同時(shí)導(dǎo)盲車直行。本文使用ULN2003驅(qū)動(dòng)芯片對(duì)步進(jìn)電機(jī)進(jìn)行驅(qū)動(dòng)。與直流電機(jī)不同的是它通過(guò)輸入電脈沖信號(hào),將脈沖信號(hào)變?yōu)檗D(zhuǎn)換角位移的機(jī)理,進(jìn)而使小車移動(dòng)。當(dāng)前市面上廣泛應(yīng)用直流電機(jī)和步進(jìn)電機(jī)。相比較而言,步進(jìn)電機(jī)結(jié)構(gòu)簡(jiǎn)單、控制性能和機(jī)動(dòng)性能優(yōu)越,盲人通過(guò)操縱手機(jī)APP可以使小車快速啟動(dòng)和停止,并且具有誤差不長(zhǎng)期積累等優(yōu)點(diǎn)。綜上,考慮到總體的設(shè)計(jì)需求,導(dǎo)盲小車選擇使用步進(jìn)電機(jī)。
“糧食銀行”并不新鮮,最早出現(xiàn)在20世紀(jì)80年代末期,20世紀(jì)90年代初一度成為農(nóng)業(yè)方面的熱詞,只是好像時(shí)間并不長(zhǎng)就慢慢消失了。具體原因可能比較復(fù)雜,不過(guò)近兩年來(lái)“糧食銀行”又重新出現(xiàn)星火之勢(shì)。
3 軟件設(shè)計(jì)與調(diào)試
以上主要介紹了整個(gè)系統(tǒng)的硬件板塊,而一個(gè)完整的系統(tǒng)還需要軟件的支持。為此,需要將硬件模塊所支持的軟件程序燒錄到單片機(jī)上,將各傳感器收集到的數(shù)據(jù)通過(guò)杜邦線傳遞,與主控模塊相連接,主控模塊依據(jù)預(yù)設(shè)的軟件程序進(jìn)行判斷和處理,最終整個(gè)系統(tǒng)的構(gòu)架搭建完成,使盲人能夠真正利用導(dǎo)盲車進(jìn)行導(dǎo)盲。
4 結(jié) 語(yǔ)
為解決當(dāng)前盲人出行問(wèn)題,本文提出了一個(gè)以STM32單片機(jī)為控制核心的智能導(dǎo)盲車系統(tǒng)。系統(tǒng)中設(shè)計(jì)了驅(qū)動(dòng)芯片、步進(jìn)電機(jī)、超聲波和紅外避障傳感器、GPS等模塊。經(jīng)過(guò)實(shí)驗(yàn)測(cè)試發(fā)現(xiàn),導(dǎo)盲車實(shí)際使用效果較為理想,解決了盲人出行困難的問(wèn)題。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30
電子設(shè)計(jì)工程(2015年8期)2015-02-27 12:05:36

- 物聯(lián)網(wǎng)技術(shù)的其它文章
- 基于任務(wù)驅(qū)動(dòng)法與拼圖法的數(shù)據(jù)庫(kù)課程小組項(xiàng)目實(shí)踐改革
- 程序設(shè)計(jì)類課程的實(shí)踐與創(chuàng)新能力的培養(yǎng)研究
- 應(yīng)用型本科物聯(lián)網(wǎng)工程專業(yè)課程思政實(shí)踐探索
- 基于MATLAB GUI的《信號(hào)與系統(tǒng)》課程仿真實(shí)驗(yàn)平臺(tái)設(shè)計(jì)
- 面向新工科的物聯(lián)網(wǎng)綜合應(yīng)用教學(xué)與實(shí)踐
- 基于無(wú)線傳感網(wǎng)與人機(jī)交互管控的智能嬰兒車