智能垃圾分類裝置硬件設計
2022-09-19 04:41:00徐聯冰蘇克顯張金亮
物聯網技術 2022年9期
吳 栓,徐聯冰,蘇克顯,吳 穎,廖 虎,張金亮
(湖北汽車工業學院 電氣與信息工程學院,湖北 十堰 442002)
0 引 言
隨著人們消費需求的變化和科技的發展,日常生活中各種智能化產品應運而生。環保問題一直是人們關注的重點,尤其垃圾分類的問題一直困擾著人們,并且目前面臨的最大問題是人們對于垃圾的具體分類不太清晰。通過對生活垃圾進行智能分類可以極大程度地幫助人們減輕負擔來提高生活質量,支持國家的可持續發展戰略,實現資源的再利用,促進節能減排。智能垃圾桶的核心在于實現垃圾的自動分類,使用者只需要將垃圾丟進垃圾桶,就能對垃圾進行自動識別和分類。
本文結合實際的應用需求,設計了一款智能垃圾分類裝置。該智能垃圾桶以英偉達Jetson Nano人工智能平臺作為數據核心處理模塊,基于BP神經網絡算法對垃圾圖像進行識別和分類來獲取垃圾信息;然后通過機械部分對垃圾進行分類,并將結果進行顯示以及語言提醒;最后通過組裝和軟硬件聯合調試,驗證系統的整體功能。
1 系統總體設計
根據實際的應用需求,對系統功能進行全面分析,系統的總體結構主要由電控部分和機械部分兩大塊構成,總體架構設計如圖1所示。其中電控部分包括:數據融合處理模塊、圖像處理與攝像頭模塊、無線通信模塊、智能音視頻顯示與提醒模塊、電源及動力模塊和執行機構控制模塊。機械部分包括:垃圾桶箱體機械結構和箱體內的齒輪傳動機構。
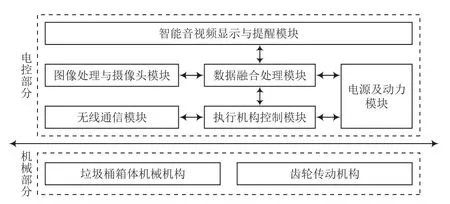
圖1 系統總體架構
系統的總體工作流程如下:
(1)電源及動力模塊為整個系統的電控及動力執行機構提供穩定的電壓輸出。
(2)圖像處理與攝像頭模塊可以實時采集當前垃圾投放口的圖像信息。
(3)數據融合處理模塊通過軟件算法對采集的垃圾圖像進行識別,并確定分類。
(4)執行機構控制模塊則根據數據融合處理模塊分類的結構控制步進電機,驅動齒輪傳動機構,將垃圾投入正確的分類池中。
(5)智能音視頻顯示與提醒模塊循環播放垃圾分類宣傳片,同時對垃圾分類識別的結果進行顯示和播報。
(6)無線通信模塊用于與上位機進行通信,查看系統的狀態信息,便于調試。
2 系統詳細設計
基于總體方案,從電控和機械兩個部分進一步對系統的主要模塊進行詳細設計。
2.1 電控部分設計
2.1.1 電源及動力模塊
電源及動力模塊主要包括穩壓模塊和驅動電機,其中電源穩壓模塊為系統其他模塊的工作平穩有序進行提供條件。根據系統主控和其他功能模塊芯片對供電特性的要求,本系統設計了3種不同的電壓等級:12 V、5 V和3.3 V。綜合考慮系統的可移動和方便拆卸等特性,系統12 V電壓則直接采用12 V/8 000 mA的鋰電池進行供電,該電池功率大、轉換效率高、充電快,能較好地滿足整個系統的供電需求。
驅動電機采用86系列的步進電機86BYG250C,額定電流為5.6 A,持續輸出力矩6 Nm,完全滿足垃圾投放池轉動所需的轉矩和功率要求。此外,該電機步進角為1.8°,通過機械設計齒輪傳動減速比為1∶10,能實現更高精度的旋轉位置控制。
2.1.2 數據融合處理模塊
系統數據融合處理模塊主要用來運行人工智能算法,實現垃圾圖像的識別和分類。該模塊基于NVIDIA(英偉達)高性能Jetson Nano人工智能運算平臺進行實現,該平臺采用四核64位ARM CPU和128核集成NVIDIA GPU,可提供472 GFLOPS的計算性能;它還包括4 GB LPDDR4存儲器,采用高效、低功耗封裝,具有5 W / 10 W功率模式和5 V-DC輸入,平臺實物如圖2所示。
圖2 英偉達Jetson Nano人工智能平臺
平臺支持NVIDIA CUDA Toolkit 10.0以及cuDNN 7.3和TensorRT等庫。該SDK包括主流的開源機器學習(ML)框架(TensorFlow、PyTorch、Caffe、Keras和 MXNet等)以及計算機視覺和機器人開發的框架(OpenCV和ROS等)。
2.1.3 執行機構控制模塊
執行機構控制模塊用于與數據融合處理模塊交互,并控制步進電機驅動傳動機構。該模塊采用意法半導體公司生產的32位處理器STM32F103ZET6為主控芯片,主頻高達72 MHz,內置高達512 KB的高速閃存,具有豐富的I/O端口和各類標準的通信接口,實時性能夠很好地滿足數據交互和電機驅動控制的要求。基于該主控芯片設計電路原理如圖3所示。其中串口1的RXD1和TXD1與無線通信模塊中的藍牙模塊對應的管腳相連,實現與上位機的數據交互。電機驅動器采用TB6600,因此主控芯片與驅動器電路連接方式設計為:PA0接PUL+,PA2接DIR+,PA3接EAN+,GND接EAN-,從而控制電機的轉速和旋轉方向。
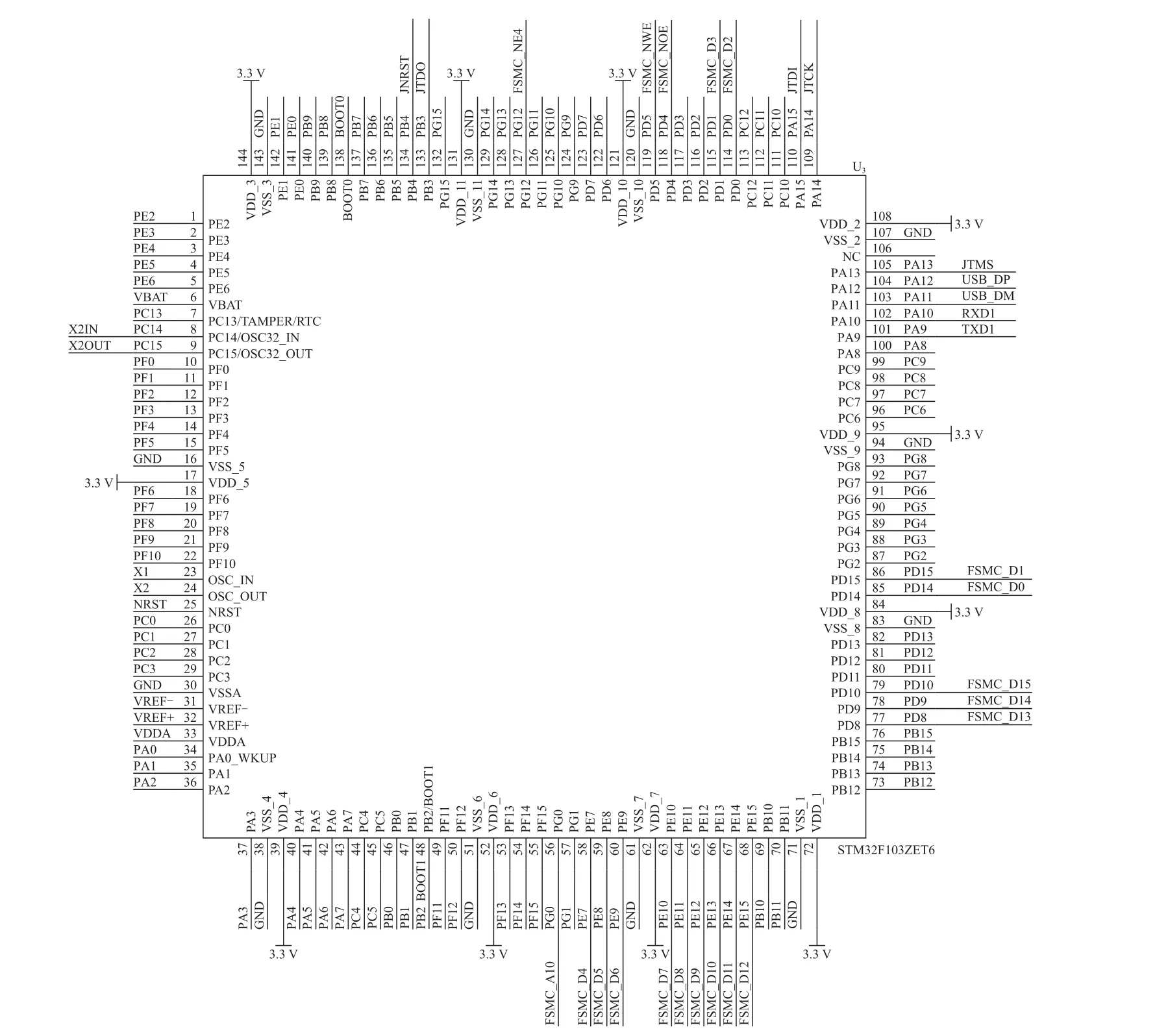
圖3 執行機構控制模塊電路
2.2 機械部分設計
機械部分包括桶箱體機械結構和箱體內的齒輪傳動機構。箱體作為整個裝置的“軀體”部分,主要包括整體材質、外觀、尺寸以及垃圾投放口尺寸、滑道坡度和位置、內部垃圾投放池的尺寸等。利用SolidWorks繪圖工具對機械部分進行設計,箱體及齒輪傳動部分的三維結構如圖4和圖5所示。
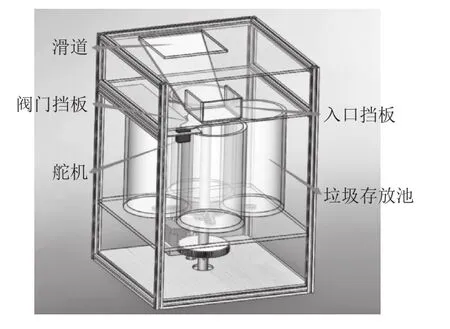
圖4 垃圾桶整體機械結構

圖5 垃圾桶齒輪傳動部分的機械結構
通過實地調研和文獻查閱,結合功能的要求,箱體整體外觀按照長方體進行設計,材質以不銹鋼和亞克力板為主構成。投放口位于整個箱體的頂部,滑道位于投放口的正下方,側邊的平臺用于安裝電控部分的各類模塊。根據當前國內城市生活垃圾分類通用標準,將日常生活垃圾歸屬為四大類,故本垃圾分類裝置設計過程按照四個投放池的規格來構建。
齒輪傳動機構由步進電機驅動,受箱體結構和尺寸的限制,為同時滿足負載轉矩和控制精度的需求,設計三軸兩級級聯齒輪傳動結構,中心主軸與四個投放池下方的旋轉平臺直連,通過中間過渡軸的兩個不同大小的齒輪與步進電機旋轉軸的齒輪級聯,從而實現整個垃圾分類裝置的旋轉分類投放。
3 系統測試
根據前述章節對電控和機械部分的詳細設計,定制相關的硬件材料進行組裝,組裝完畢后對硬件進行逐步調試。測試主要內容和結果見表1所列。硬件測試完畢后,進行軟件算法實現,通過軟硬件聯合調試,逐步實現系統的各項功能。基于高性能的人工智能平臺,系統通過神經網絡能夠對垃圾圖像進行快速識別,與執行機構控制模塊聯動準確實現垃圾的分類投放。經過多次實驗發現,系統響應速度快且具有較高的準確率。
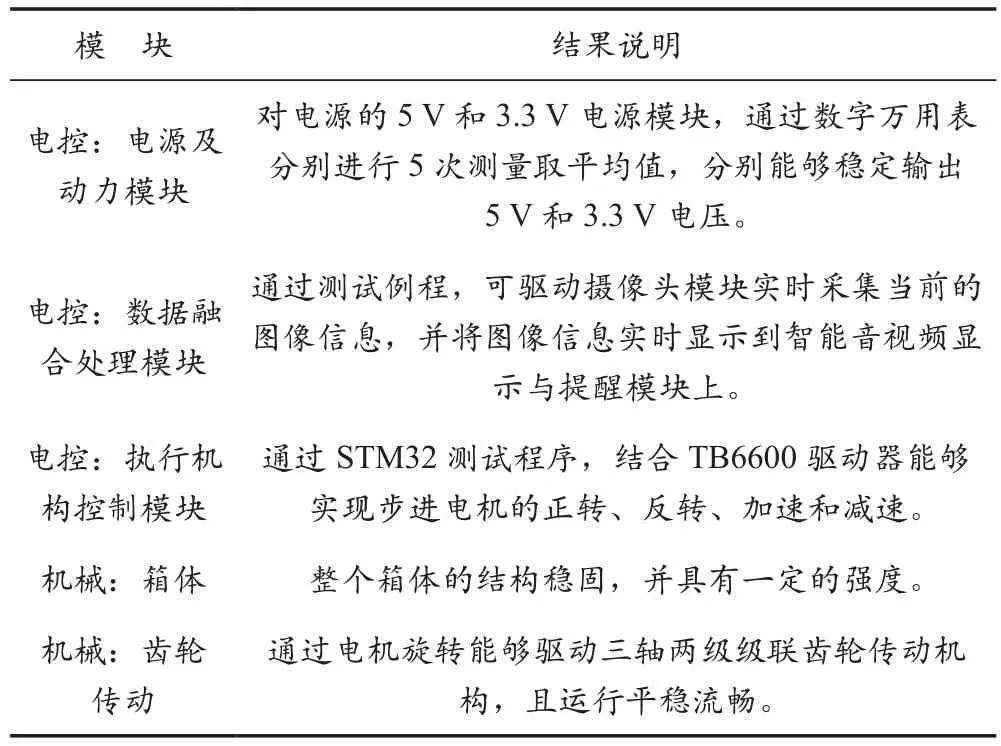
表1 硬件測試結果
4 結 語
為進一步將垃圾分類落到實處,本文綜合運用人工智能、圖像處理、智能控制等技術設計了一種智能垃圾分類裝置。主要對系統的電控和機械結構方面進行了詳細的設計,經過實物安裝、調試、測試和驗證,證明系統的實時性和準確率均能夠達到預期效果。然而,由于各方面條件的限制,在同時投放多個垃圾或者不同光照等較為復雜場景下,系統的識別和分類結果較差。后續將進一步結合物聯網、云計算等新技術和平臺進行研究與改進。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代工人(2020年8期)2020-05-25 09:07:38
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
家庭影院技術(2017年9期)2017-09-26 03:41:45
