壓電式氣體流量比例閥建模與控制技術(shù)研究
2022-09-19 07:52:54李傳江朱燕飛王明月
壓電與聲光 2022年4期
關(guān)鍵詞:模型
李傳江,鄧 徽,顧 亞,朱燕飛,王明月
(上海師范大學(xué) 信息與機(jī)電工程學(xué)院,上海 201418)
0 引言
隨著氣動技術(shù)的發(fā)展,氣體流量精密控制已廣泛應(yīng)用在半導(dǎo)體制造[1]、醫(yī)療器械[2]和航天[3]等領(lǐng)域。與傳統(tǒng)電磁式流量閥相比,以壓電陶瓷為致動器的流量比例控制閥具有響應(yīng)快,體積小,輸出力大及控制精度高等優(yōu)點[4]。國內(nèi)外學(xué)者積極研發(fā)基于壓電材料的各種流體閥, 然而壓電陶瓷作為致動器,其固有的遲滯非線性導(dǎo)致流量輸出誤差較大[5]。為了表征壓電致動器的遲滯特性,已開發(fā)了Prandtl-Ishlinskii(PI)模型、Bouc-Wen模型[6]、Krasnosel'skii-Pokrovskii(KP)模型[7]、Duhem模型[8]和神經(jīng)網(wǎng)絡(luò)模型[9]等。田雷等[10]利用最小二乘法辨識PI遲滯模型的權(quán)值,對單壓電變形鏡進(jìn)行開環(huán)控制,使變形遲滯由9.3%降低到1.2%,但并未考慮遲滯非對稱與閉環(huán)控制的情況。王代華等[11]設(shè)計了基于Bouc-Wen模型的前饋線性化控制器,能較好地實現(xiàn)輸入輸出間遲滯關(guān)系的線性化,但Bouc-Wen模型難以完整描述壓電陶瓷遲滯特性曲線,且精度有限。
本文采用改進(jìn)的PI模型對壓電式氣體比例閥進(jìn)行遲滯建模,建立了氣體流量閥輸出流量與驅(qū)動電壓的非對稱遲滯非線性模型,并利用改進(jìn)的自適應(yīng)粒子群遺傳算法對權(quán)值進(jìn)行辨識,減小了辨識誤差。將建立的模型作為前饋補(bǔ)償控制器,并結(jié)合無模型自適應(yīng)控制算法,最后通過實驗對比,表明該方法可提高氣體流量閥輸出流量控制的快速性。
1 壓電式氣體流量比例閥控制系統(tǒng)組成與特性
1.1 控制系統(tǒng)組成
圖1為本文采用江蘇高凱公司生產(chǎn)的壓電式氣體流量比例控制閥[12]。壓電式氣體流量比例控制閥控制系統(tǒng)由壓電驅(qū)動閥體、流量傳感器和驅(qū)動控制板(在安裝閥體的外側(cè))組成。驅(qū)動控制板產(chǎn)生壓電陶瓷驅(qū)動信號,處理流量信號及實現(xiàn)閉環(huán)控制算法,即根據(jù)用戶設(shè)定的期望流量,實時采集流量信號,通過閉環(huán)控制算法計算控制量,輸出相應(yīng)的驅(qū)動電壓,調(diào)節(jié)閥門的開度,進(jìn)而控制輸出氣體流量比。
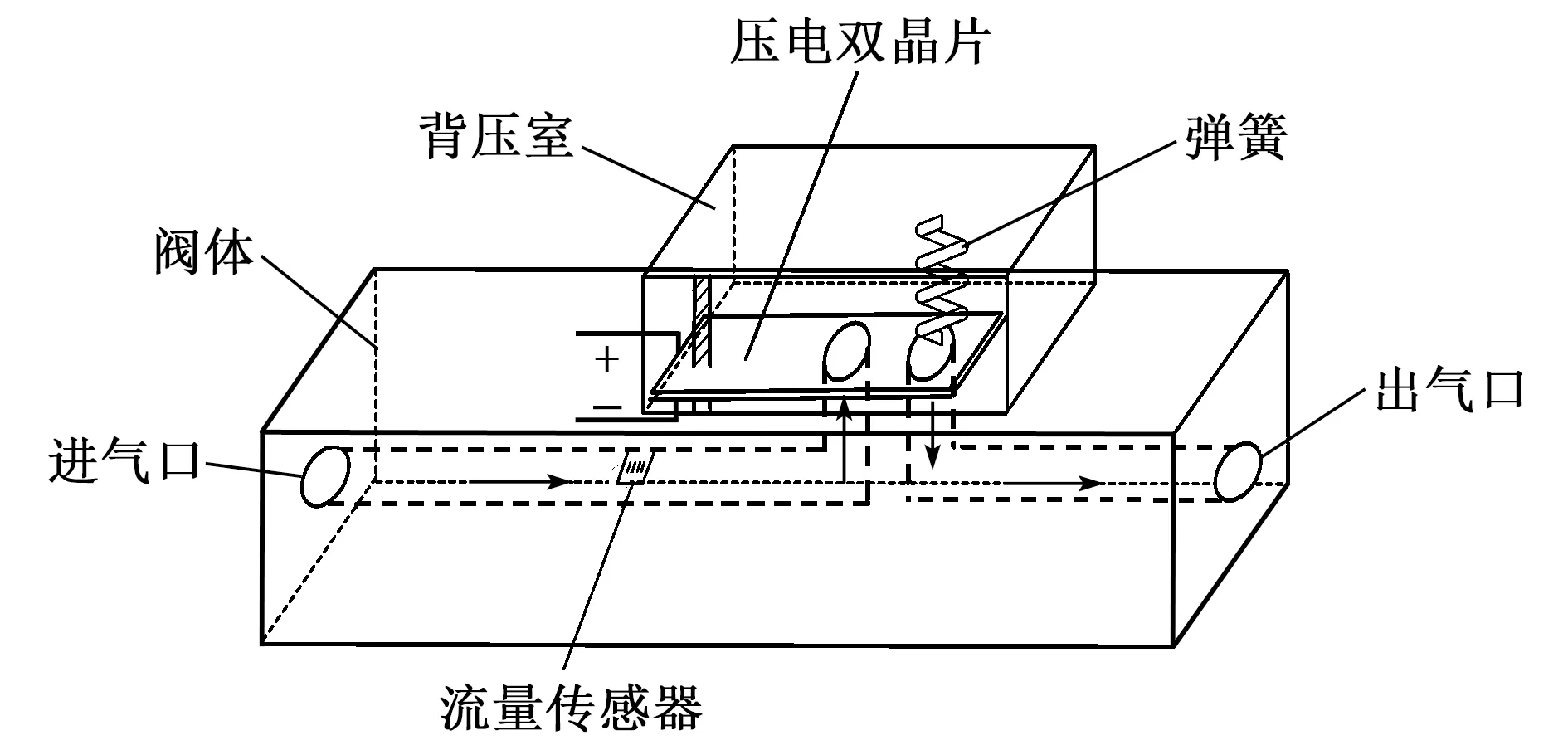
圖1 壓電雙晶片驅(qū)動式氣體比例閥結(jié)構(gòu)簡圖
1.2 壓電式氣體流量比例閥控制系統(tǒng)的非線性
壓電式氣體比例閥由壓電雙晶片致動,而壓電材料自身固有的遲滯等非線性特性,導(dǎo)致比例閥具有遲滯特性、蠕變特性和溫度特性等[13]。在壓電系統(tǒng)中,遲滯特性是影響壓電驅(qū)動器精度的主要因素,遲滯特性是指給壓電材料施加電壓,其升、降壓曲線不重合,圖2為壓電式氣體比例閥驅(qū)動電壓與流量的遲滯曲線圖。
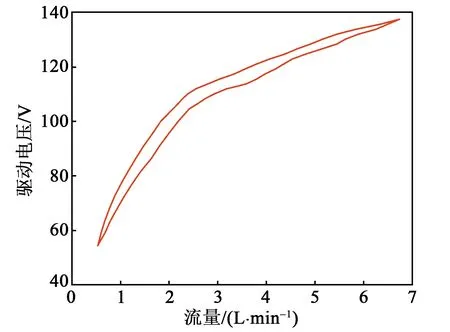
圖2 比例閥驅(qū)動電壓與流量的遲滯曲線圖
2 壓電式氣體流量比例控制閥遲滯非線性建模與復(fù)合控制
2.1 改進(jìn)PI遲滯模型的建立
PI模型利用Play算子的加權(quán)和及輸入信號的線性函數(shù)表征遲滯非線性[14]。Play算子為
y(t)=max{x(t)-r,min{x(t)+r,y(ti)}}
(1)
式中:ti為第i段時間;x(t)為輸入的驅(qū)動電壓;y(t)為輸出的氣體流量;r,w分別為Play算子的閾值和權(quán)值。
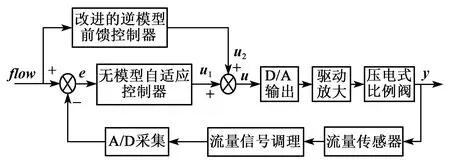
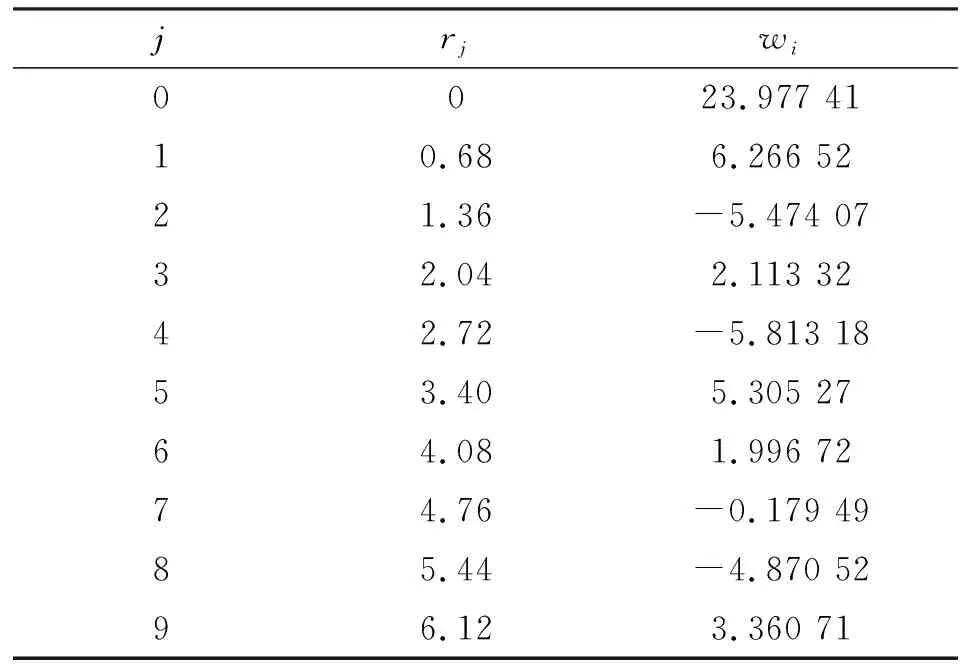
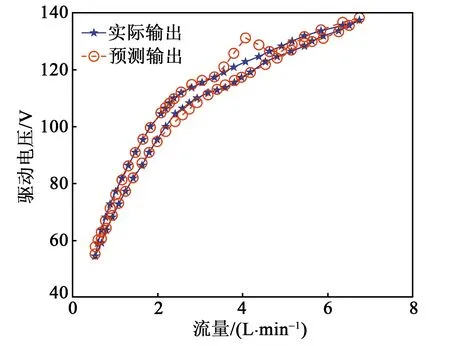
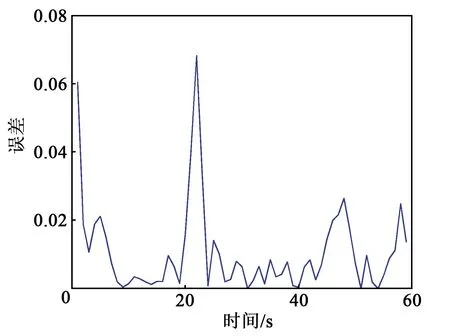
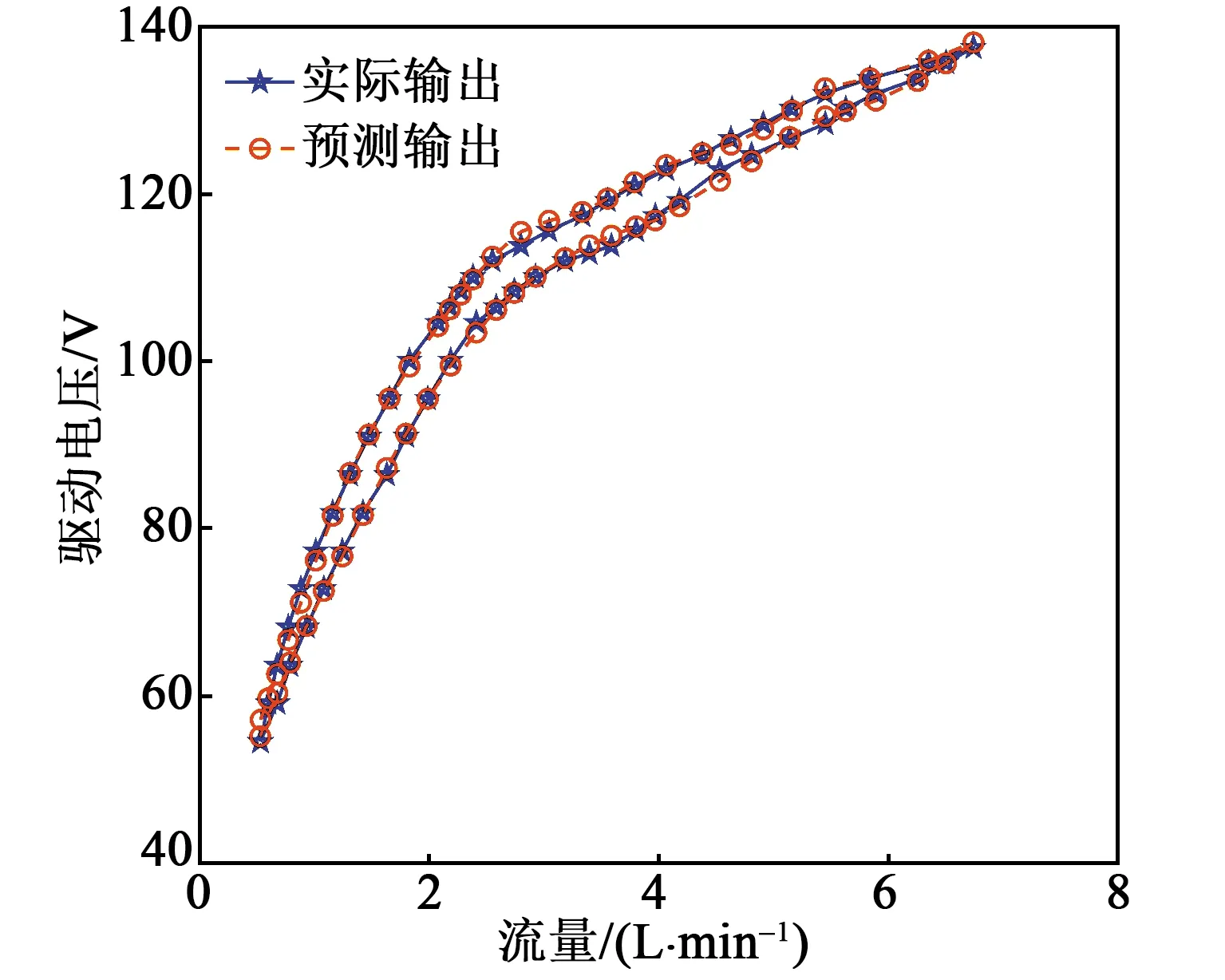
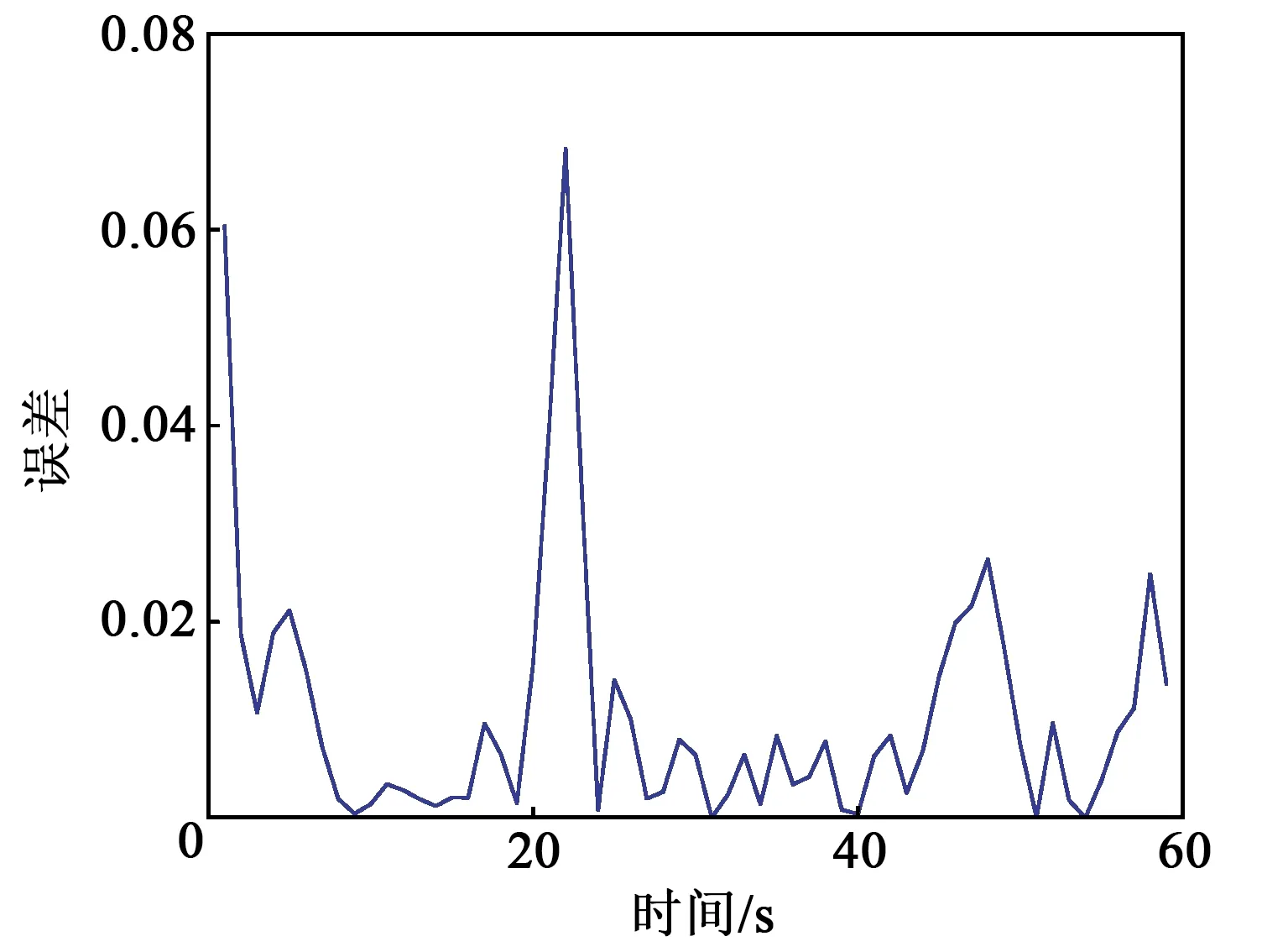
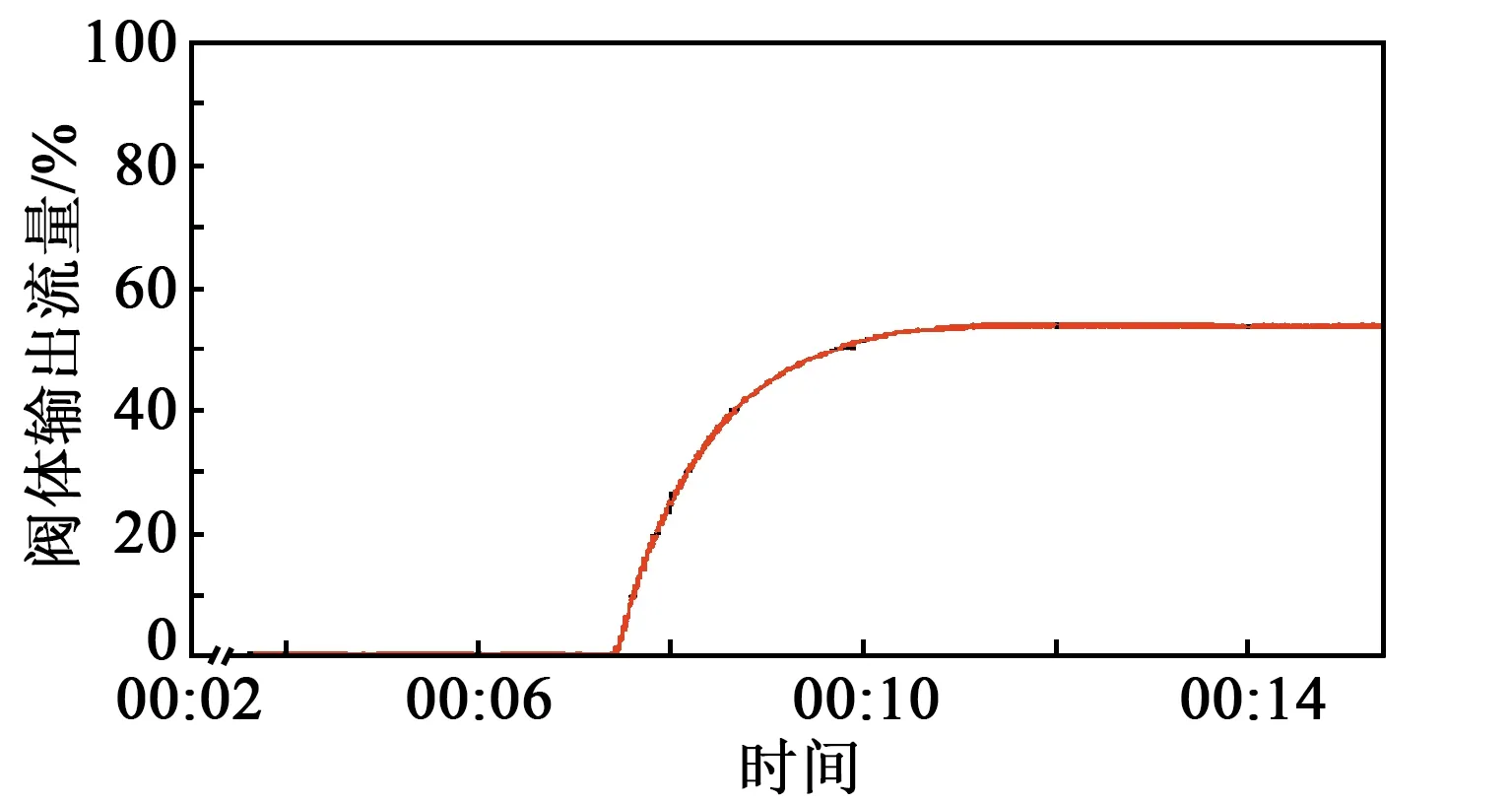
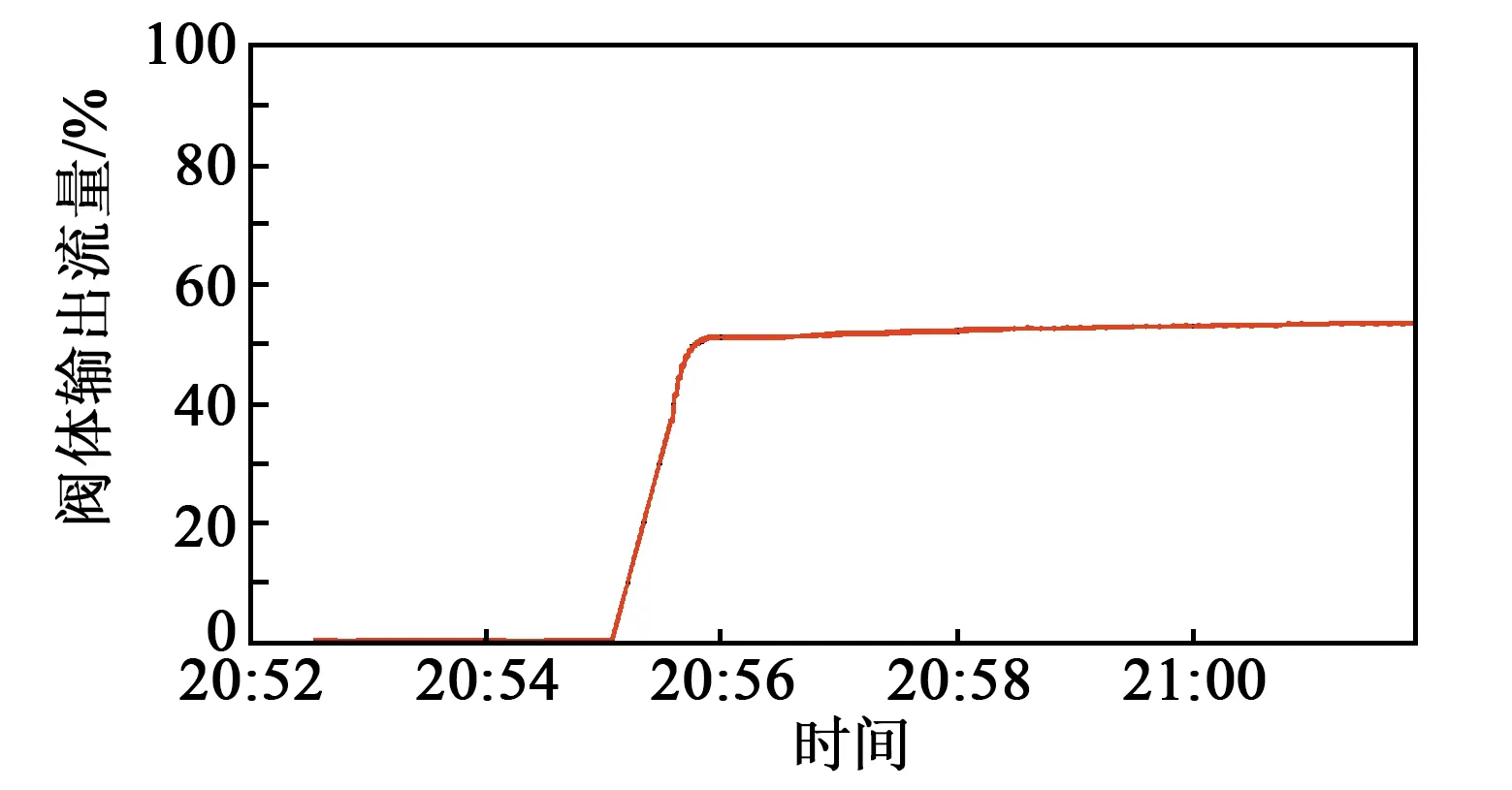
x(t)在分段區(qū)間內(nèi)連續(xù),t∈(ti,ti+1),i∈[0,N-1],0=t0 y(0)=fr(x(0),0) (2) PI模型的數(shù)學(xué)表達(dá)式為 rj,min{x(t)+rj,yj(ti-1)}} (3) 式中j=0,…,n(n=10)為j個Play算子。 (4) 壓電式氣體流量閥的遲滯特性曲線是非奇對稱的,傳統(tǒng)PI模型難以對其描述,通過引入多項式輸入來改進(jìn)傳統(tǒng)的PI模型,使改進(jìn)后的模型能較準(zhǔn)確地描述壓電式氣體流量閥的遲滯特性。改進(jìn)的PI模型表達(dá)式為 (5) g(t)=ax3(t)+bx2(t)+cx(t)+d (6) 式中:g(t)為引入的多項式;a,b,c,d為常量;Hm(t)為改進(jìn)的PI模型的輸出。由于引入了多項式輸入,改進(jìn)的PI模型具有非奇對稱性,能準(zhǔn)確描述本文的壓電式氣體比例閥的遲滯特性。 由于遲滯模型的高度非線性、多維度及多約束的性質(zhì),遲滯模型的參數(shù)辨識是一個難題。粒子群優(yōu)化算法具有易實現(xiàn)、精度高及收斂速度快等優(yōu)點[15],因此,本文選用該方法對改進(jìn)的PI遲滯模型進(jìn)行參數(shù)辨識。如果粒子的群體規(guī)模為M,目標(biāo)搜索空間為D維,則第i(i=1,2,…,M) 個粒子的位置可表示為Xi,飛行速度記為vi,它所經(jīng)過的“最好”位置記為P(vi),群體中“最好”粒子的位置為Pg,那么粒子i將根據(jù)下式來更新自己的速度和位置[16]: (7) (8) 式中:d=1,2,…,D;W為慣性因子;C1,C2為加速度常數(shù),一般取C1=C2∈[0,4];random(0,1)表示區(qū)間[0,1]上的隨機(jī)數(shù)。 本文選擇自適應(yīng)調(diào)整來改進(jìn)慣性權(quán)重系數(shù)以跳出局部最優(yōu),自適應(yīng)慣性權(quán)重系數(shù)為 (9) 式中:ω1,ω2分別為起始與結(jié)束時的慣性權(quán)重;k為當(dāng)前迭代次數(shù);N為總迭代次數(shù)。 為讓粒子群算法擁有更好的全局搜索能力和收斂性,本文自適應(yīng)學(xué)習(xí)因子設(shè)置為 (10) 式中C11,C12,C21,C22分別為第1、2個學(xué)習(xí)因子的起始值與結(jié)束值。在更新粒子速度與位置后,為避免粒子群算法迭代過程中多樣性損失而陷入局部最優(yōu)解的情況,在此基礎(chǔ)上引入遺傳算法的選擇、交叉和變異機(jī)制。 具體改進(jìn)算法的計算步驟如下: 1) 粒子群初始化,包括粒子速度與位置初始化及個體最優(yōu)與全局最優(yōu)的初始化。 2) 計算自適應(yīng)慣性權(quán)重系數(shù)ω,學(xué)習(xí)因子C1和C2。 3) 按式(7)、(8)更新粒子速度與位置,并對越限粒子做邊界化處理。 4) 選擇: 采用交叉概率算子選擇需要交叉的個體。 5) 交叉: 采用交叉臨界值對粒子進(jìn)行交叉操作。 6) 變異: 采用變異概率算子進(jìn)行變異操作。 7) 更新個體最優(yōu)值與全局最優(yōu)值。 8) 判斷是否達(dá)到最大迭代次數(shù),如果是則轉(zhuǎn)步驟9),否則轉(zhuǎn)步驟2)。 9) 輸出模型辨識參數(shù))。 壓電陶瓷固有的遲滯特性與氣體流動的復(fù)雜特性限制了系統(tǒng)的響應(yīng)速度,在極端情況下可能引起振動和系統(tǒng)不穩(wěn)定。為提高控制流量輸出的快速性與精確性[17-18],將遲滯模型作為前饋補(bǔ)償控制器,并結(jié)合無模型自適應(yīng)控制算法,實現(xiàn)氣體流量閥快速精確的輸出流量控制。復(fù)合控制系統(tǒng)框圖如圖3所示,隨著期望值flow的輸入,反饋回路實時采集流量信號計算得到誤差e,并輸入無模型自適應(yīng)控制器得到u1,前饋補(bǔ)償控制器輸出補(bǔ)償值u2,二者求和通過D/A輸出控制電壓u,后經(jīng)驅(qū)動放大施加在壓電式比例閥上,進(jìn)而控制流量y。 圖3 壓電式氣體比例閥復(fù)合控制流程圖 無模型自適應(yīng)控制器主要包括偽偏導(dǎo)數(shù)估計算法(偽偏導(dǎo)數(shù)的辨識)及控制算法(控制律計算): [y*(k+1)-y(k)- (11) [y*(k+1)-y(k)] (12) 本文利用自主研發(fā)的閥體控制器輸出驅(qū)動電壓,使閥體內(nèi)部的壓電陶瓷產(chǎn)生伸縮變形,并由控制器讀取當(dāng)前流量值。采用測量的59組驅(qū)動電壓-流量數(shù)據(jù)對改進(jìn)的PI模型進(jìn)行自適應(yīng)粒子群遺傳算法參數(shù)辨識,即可得到10個權(quán)值的最優(yōu)解與4個參數(shù),如表1、2所示。 表1 改進(jìn)的PI模型多項式參數(shù) 表2 改進(jìn)的PI模型權(quán)值參數(shù) 圖4為粒子群算法辨識結(jié)果。圖5為粒子群算法辨識誤差。圖6為自適應(yīng)粒子群遺傳算法辨識結(jié)果。圖7為自適應(yīng)粒子群遺傳算法辨識誤差。表3為改進(jìn)PI模型性能結(jié)果。由圖4~7和表3可看出,采用粒子群算法辨識模型的相對誤差為0.016 1%,均方根誤差為1.718 4 V,最大絕對值誤差為8.2×10-6。采用自適應(yīng)粒子群遺傳算法辨識參數(shù)得到模型的相對誤差為0.007 3%,均方根誤差為0.782 4 V,最大絕對值誤差為5.87×10-6。采用自適應(yīng)粒子群遺傳算法建立的遲滯模型能更好地描述壓電驅(qū)動精密氣體流量閥的遲滯特性。 圖4 粒子群算法辨識結(jié)果 圖5 粒子群算法辨識誤差 圖6 自適應(yīng)粒子群遺傳算法辨識結(jié)果 圖7 自適應(yīng)粒子群遺傳算法辨識誤差 表3 改進(jìn)PI模型性能結(jié)果 實驗中,系統(tǒng)基本測試實驗裝置如圖8所示。圖中URAT為串口通信。 圖8 實驗裝置 實驗裝置主要由驅(qū)動控制板、壓電式氣體流量閥、流量傳感器、氣源及其配套組件、PC機(jī)等組成。本文選用STM32F103作為主控單元,嵌入式軟件實現(xiàn)上述復(fù)合控制算法。分別對比了無模型自適應(yīng)控制算法和前饋補(bǔ)償與無模型自適應(yīng)復(fù)合控制算法在相同期望輸出流量比例下的控制效果,實驗中,無模型自適應(yīng)的系數(shù)為:η=1,μ=2,步長因子ρ=0.2,λ=2,如圖9所示。 圖9 無模型自適應(yīng)控制結(jié)果 圖10為無模型自適應(yīng)+補(bǔ)償控制結(jié)果。對比圖9、10中流量上升曲線可知,將遲滯非線性模型作為前饋補(bǔ)償控制與無模型控制算法相結(jié)合,可提高流量閥輸出流量控制的快速性,與單獨的無模型自適應(yīng)控制結(jié)果相比,其調(diào)節(jié)時間降低了60%。 圖10 無模型自適應(yīng)+補(bǔ)償控制結(jié)果 本文針對壓電式氣體流量比例控制閥分析了其工作原理,研究了壓電雙晶片遲滯特性是影響氣體流量輸出精度的主要因素。針對傳統(tǒng)PI模型難以描述非對稱的遲滯曲線的問題,提出了一種改進(jìn)的PI模型,利用自適應(yīng)粒子群遺傳算法進(jìn)行參數(shù)辨識,得到了流量-驅(qū)動電壓的遲滯模型, 相對誤差為0.007 3%。將建立的遲滯模型作為前饋補(bǔ)償與無模型控制算法相結(jié)合。實驗結(jié)果表明,復(fù)合控制算法能有效縮短調(diào)節(jié)時間,實現(xiàn)快速準(zhǔn)確的流量比例控制,對于壓電陶瓷在氣體流量控制領(lǐng)域的研究有重要意義。2.2 改進(jìn)的PI遲滯模型的參數(shù)辨識
2.3 前饋補(bǔ)償與無模型復(fù)合控制算法設(shè)計


3 實驗與結(jié)果分析
3.1 模型參數(shù)辨識結(jié)果


3.2 壓電式氣體流量比例閥控制實驗

4 結(jié)束語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19