基于粒子群算法的橋式起重機模糊PID防搖控制
2022-09-21 02:58:40卜凡舟孫玉國盧鳳嬌
船舶與海洋工程 2022年4期
關鍵詞:優(yōu)化
卜凡舟,孫玉國,盧鳳嬌
(上海理工大學光電信息與計算機工程學院,上海200093)
0 引 言
起重機在起吊和運載貨物過程中會受到風載荷和機械慣性的影響,繩索懸掛吊重會產(chǎn)生近似無阻尼的振蕩,僅靠空氣阻尼自然消擺會花費大量時間,影響工作效率。此外,吊重擺動時產(chǎn)生的周期性力矩會對起重機結構造成疲勞損傷。因此,對起重機防搖控制進行研究具有重要的工程意義。目前,已有學者將智能控制算法(如最優(yōu)控制、輸入整型控制和粒子群算法)應用到橋式起重機防搖控制系統(tǒng)中。粒子群優(yōu)化(Particle Swarm Optimization,PSO)算法因具有結構簡單、調整參數(shù)少等優(yōu)點而廣泛應用于控制算法的參數(shù)優(yōu)化中。PSO最早由KENNEDY等提出,其基本思想是對一群粒子尋找最優(yōu)解并使每個粒子都處于最優(yōu)解狀態(tài),能處理連續(xù)或離散空間內(nèi)的數(shù)據(jù)優(yōu)化問題。本文根據(jù)模糊控制易于解決遲滯、非線性系統(tǒng)問題的特點,將模糊控制與傳統(tǒng)PID(Proportion Integral Differential)控制相結合,快速消擺。由于模糊PID控制器參數(shù)較多、難以快速調節(jié),采用PSO算法進行優(yōu)化調整。通過建立起重機防搖數(shù)學模型并進行Simulink仿真,對基于粒子群算法的模糊PID控制效果進行分析,為后期橋式起重機防搖控制提供新的理論方法。
1 起重機數(shù)學模型
結合橋式起重機的工作過程,將滑軌和貨物等抽象為“小車-吊重模型”。小車m受到的驅動力為F,圖1為橋式起重機力學結構模型,以從左到右為x軸正向,以垂直地面向下為z軸正向,建立基于右手定則的平面直角坐標系。小車在x軸上滑動,帶動吊重m移動,m自由擺動,擺角為θ,假設起重機吊繩為柔性繩,長度為l,不計其質量。在實際滑動過程中,小車與滑軌之間的摩擦阻力f近似與小車速度˙x成線性關系,若摩擦因數(shù)為μ,則f=μ˙x。
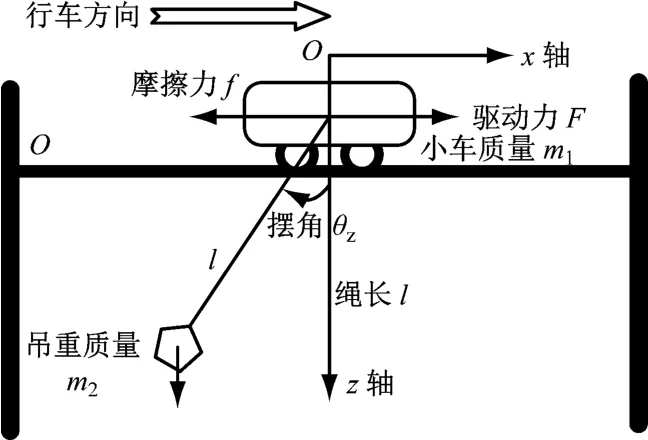
圖1 橋式起重機力學結構模型
基于以上假設,采用拉格朗日方程可得到起重機防搖控制系統(tǒng)的動力學方程為

整理得

2 模糊PID控制器設計
PID控制器的計算公式為

式(3)中:e(t)=r(t)-c(t),e(t)為系統(tǒng)誤差,r(t)為系統(tǒng)輸入值,c(t)為系統(tǒng)輸出值;K、K和K分別為比例、積分和微分系數(shù)。
在起重機防搖控制系統(tǒng)中,為使吊重快速并平穩(wěn)地消擺,將模糊PID控制器設計為兩輸入(擺角誤差e和誤差變化率c)-三輸出(K、K和K)的控制結構。設e、c、K、K和K的模糊子集為{NB,NM,NS,ZE,PS,PM,PB},分別對應{負大,負中,負小,零,正小,正中,正大}。控制器選擇合理的比例因子K和K,在正負邊界處分別采用平滑連續(xù)的Z型隸屬度函數(shù)和S型隸屬度函數(shù),對中間部分采用靈敏度較強的三角形隸屬度函數(shù),在PID算法的基礎上對PID控制參數(shù)進行模糊自整定,模糊PID控制器的實際控制參數(shù)K′、K′和K′的表達式為

式(4)中:K、K和K為模糊PID控制初始值;k、k和k為常量。
根據(jù)K、K和K對輸出特性的影響,可通過不同的e和c建立模糊規(guī)則:當e較大時,K取大提高響應速度,K取小減少超調,K取小或零增強系統(tǒng)的抗干擾能力;當e和c中等大小時,為提高系統(tǒng)的響應速度及減小超調量,K適當取小,K和K取值適中;當e較小時,K和K取大,避免系統(tǒng)振蕩;當c較大時,K取小;當c較小時,K取大。模糊控制規(guī)則表見表1。
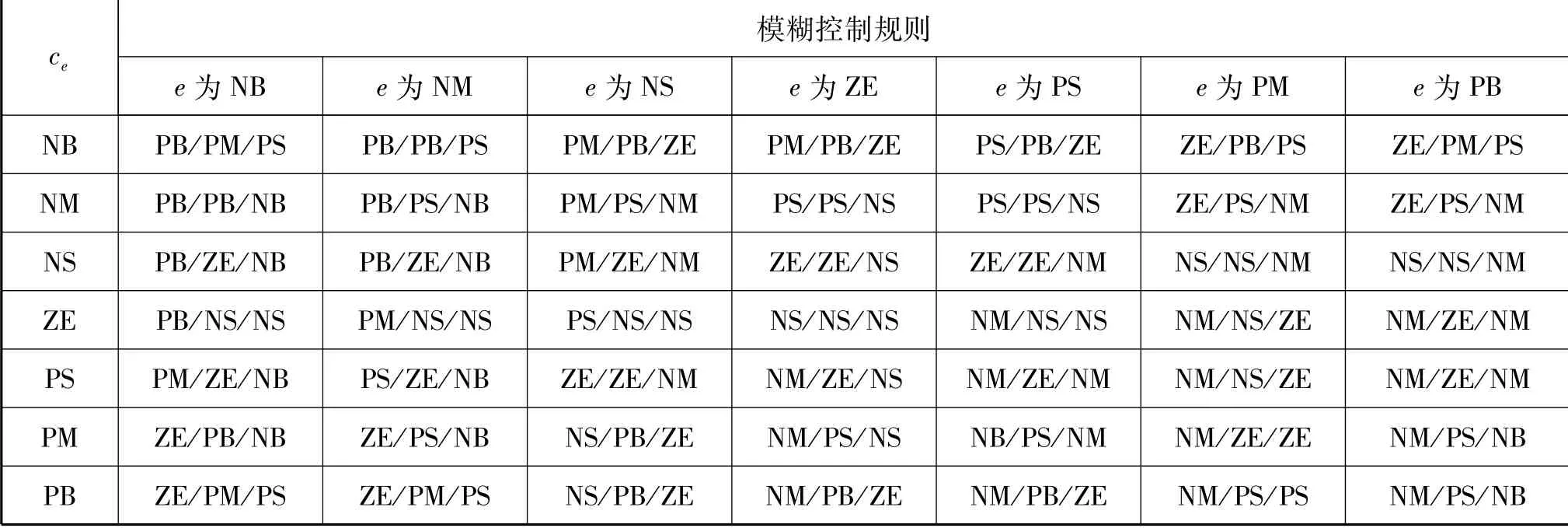
表1 模糊控制規(guī)則表
根據(jù)表1所示的規(guī)則,采用極大-極小法進行推理,采用加權平均數(shù)法進行解模糊化,表達式為

式(5)中:μ(x)為輸出模糊論域x對應的隸屬度函數(shù)。
PID初始參數(shù)和比例因子決定模糊控制器的性能,但參數(shù)的選取主要根據(jù)專家知識和試湊法,具有很強的主觀性和不確定性。為適配出最優(yōu)的參數(shù),使控制性能達到最優(yōu),需對參數(shù)進行尋優(yōu)處理。
3 PSO算法
PSO算法是由一組粒子在搜索空間中運動,受自身的最佳過去位置pbest和整個群體或近鄰的最佳過去位置gbest的影響調整自身位置,最終求得最優(yōu)解,即每個粒子找到自身的最優(yōu)解,帶動群體粒子找到最優(yōu)解。PSO算法流程圖見圖2。每次迭代粒子i的第d維速度的更新公式為

圖2 PSO流程圖

粒子i的第d維位置的更新公式為

式(6)和(7)中:v為粒子速度;x為粒子位置;w為慣性權值,r和r為加速度因子,在[0,1]中隨機產(chǎn)生;c和c為學習因子,一般取2。
先采用算法不斷對量化因子K、K和模糊PID控制參數(shù)k、k、k進行尋優(yōu)處理,使模糊PID控制器的控制輸出性能最優(yōu),達到快速消擺的效果。基于PSO算法優(yōu)化的模糊PID控制器原理圖見圖3。

圖3 基于PSO算法優(yōu)化的模糊PID控制器原理圖
4 仿真分析
采用PSO算法對橋式起重機防搖控制系統(tǒng)進行Simulink仿真,包括防搖控制系統(tǒng)的Simulink模型和PSO優(yōu)化算法程序2部分。橋式起重機防搖控制仿真框圖見圖4。仿真參數(shù)為:m=1 000 kg;m=2 000 kg;繩長l=3 m;重力加速度g=9.797 m/s;摩擦因數(shù)μ=0.165;在小車靜止狀態(tài)下施加的驅動力F=1 500 N。PSO算法設置的參數(shù):粒子數(shù)為100;迭代次數(shù)為100;慣性權重ω為0.6;粒子的初始速度、初始位置和加速度因子r和r由隨機函數(shù)產(chǎn)生;粒子運行的最大速度和最小速度分別設為1和-1;K、K、K、K和K的取值范圍均設為[0,300]。
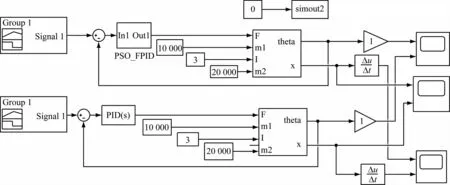
圖4 橋式起重機防搖控制仿真框圖
模擬起重機實際運載過程,對小車施加驅動F=1 500 N,先施加驅動力0~3 s,不施加驅動力運行一段時間之后,在9~12 s施加一個與該作用力大小相同、方向相反的作用力使小車停下,記錄吊重擺動和小車速度曲線,見圖5。圖5中吊重擺角的絕對值與小車速度的變化率近似呈線性關系。將F作為輸入量,將擺角θ作為輸出量,分別采用粒子群模糊PID控制算法和傳統(tǒng)的PID控制算法進行仿真,關注消擺時間和最大擺角幅度等性能指標的表現(xiàn)。

圖5 1 500 N驅動力下起重機仿真曲線圖
圖6為初始擺角為6°時的擺角消除響應曲線。由圖6可知,當初始擺角為6°時,PSO模糊PID控制器的吊重達到穩(wěn)定狀態(tài)僅需4.8 s,采用傳統(tǒng)PID控制器時吊重需11 s才能到達穩(wěn)定狀態(tài)。采用PSO算法優(yōu)化后的K、K和K分別為22.4、0.2和26.8,將其代入模糊PID控制器中,得到的擺角曲線見圖7:當施加的驅動力為1 500 N時,僅采用PID控制,吊重擺角的最大擺幅達到6.42°,停擺時間為28.7 s;采用模糊PID控制器并利用PSO算法優(yōu)化后的系統(tǒng)停擺時間為15.2 s,最大擺幅僅有1.83°。由此可見,采用PSO算法優(yōu)化模糊PID參數(shù)之后,系統(tǒng)具有良好的穩(wěn)定性。

圖6 初始擺角為6°時的擺角消除響應曲線
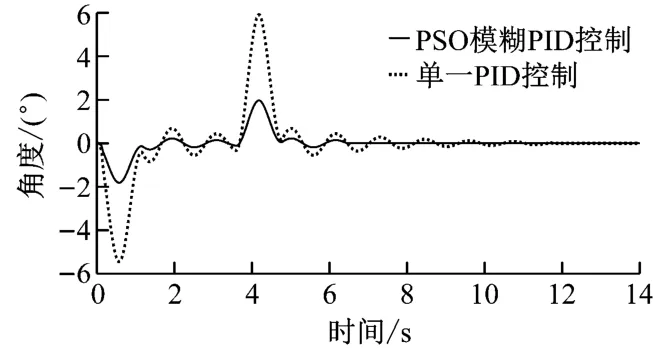
圖7 不同控制算法的擺角消除響應曲線
5 結 語
對橋式起重機進行防搖控制,既能提高其運輸效率,又能延長其使用壽命。本文針對橋式起重機的運載情況建立橋式起重機系統(tǒng)防搖模型,提出了一種基于PSO算法的模糊PID防搖控制系統(tǒng)。通過開展Simulink仿真試驗,發(fā)現(xiàn)采用基于PSO算法的模糊PID防搖控制效果良好。與傳統(tǒng)的PID防搖控制方法相比,該方法在縮短消擺時間和減小擺角幅度方面的表現(xiàn)有明顯提升。仿真結果表明,該方法可運用到起重機的防搖控制系統(tǒng)設計中,取代人工操作,實現(xiàn)起重機自動化運輸。
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45