
一種新型自動化上下臺階輪椅設計*
2022-09-22 08:51:18伍世英
機電工程技術 2022年8期
李 哲,伍世英,許 昌
(1.廣州鐵路職業技術學院機電工程學院,廣州 510430;2.武漢理工大學藝術與設計學院,武漢 430070)
0 引言
隨著人口數量和人均壽命的雙重增長,老齡化帶來的社會問題日趨嚴重。我國老年人占比將近14%,老年人因機體功能降低、疾病等原因造成行走能力減低或喪失的非常多,而腿腳不便的殘疾人士也超過8千萬人[1]。這是一個龐大特殊的群體,需要社會的關愛,也需要多種適合他們心理和生理特征的輔助工具。輪椅是目前老年人和腿腳不便人士使用得最多也最方便的工具。借助于輪椅,使得老年人和腿腳不便的人士具有了一定的行動能力,他們可以自理生活、料理家務,甚至能勝任適當的工作。
由于結構上的缺陷,普通輪椅使用人員在上下樓梯時只能選擇尋求他人幫助,即使是有人陪同的情況下,想要上下樓梯也十分困難[2]。普通輪椅使用者的日常生活很難自理,必須有人全天候陪同,無人看護時只能在家中狹小的空間范圍里移動,長期不與外界接觸不利于人的身心健康,且給家人也帶來了麻煩。因此,解決老年人與殘疾人士出行難最好的方法就是設計一種既能夠像普通輪椅適應平地行走又能夠翻越障礙、上下樓梯的輪椅。
美國的Bray在一百多年前開始研究上下樓梯的輪椅和裝置。近半個世紀以來歐美各發達國家均開始關注可自動上下樓梯輪椅及裝置的研究,有一些產品已經投入市場使用。目前已有的上下樓梯輪椅按其工作原理分為以下3種:履帶式、輪組式和步行式。
履帶式輪椅與普通輪椅相比最大特點是其內部安裝了履帶,可在需要時和普通輪子進行更替使用。其底部安裝的4個普通車輪在平地運行時使用,當遇到樓梯臺階時,用戶通過簡單的操作將普通車輪收起,同時將履帶輪更換到指定位置,通過電機帶動履帶轉動,類似于坦克一樣翻越臺階,無需旁人輔助便能自動上下樓梯。履帶式輪椅在上下樓梯過程中行走連續性強,操作者不需要額外的操作即可完成上下樓,輪椅的重心一直沿著樓梯的傾角線直線運動,平穩安全。履帶式輪椅最大不足是體積自重較大,平地行駛緩慢,上下樓梯時易造成樓梯邊沿的破損[5-6]。
輪組式輪椅分為單輪組式和雙輪組式,其上下樓梯的核心部件由均勻分布在Y形或十字形系桿上的多組小輪構成。各組小輪既能繞自身的軸線進行自轉,又可隨系桿一起繞中心軸進行公轉。平地行走時,各小輪自轉,上下樓梯時,各小輪一起公轉,從而實現上下樓梯的功能。使用人員在乘坐單輪組式輪椅上下樓時無法保證重心的穩定,安全性較差;雙輪組式雖能實現自動上下樓梯,但其體積過大且自身重量大,空間小的地方無法使用,平地上使用性差[7-9]。
通過對普通輪椅結構進行調整,加裝鉸鏈桿件組成可上下樓梯的步行式輪椅。上樓時電機驅動鉸鏈桿件組運動,將輪椅和使用人員抬升并向前移動到第一階樓梯上的位置,重復這種動作直至上完該段樓梯。步行式輪椅上下樓梯時平穩可靠,能適應多種不同尺寸的臺階,但它對控制的要求高,操作復雜,老年人使用比較困難,且對樓梯質量要求較高,上下樓梯速度較慢[10-12]。
目前對于可上樓輪椅的研究已有一定基礎,針對前期設計中存在的問題,本文設計了一款適用于老年人或腿腳不便的人員且能夠幫助使用者安全輕松地上下樓的新型輪椅。
1 新型輪椅主要結構介紹
1.1 主體結構
該新型輪椅的主體結構如圖1所示。其在傳統輪椅的結構基礎上進行了相關改進。首先,設計擯棄了傳統輪子的結構,采用三角輪并結合彈簧的機構,使輪子能夠快速地在平地行駛狀態、爬樓狀態之間進行切換。考慮到輪椅上樓重心后傾的問題,在輪椅的后輪增加了伸縮杠保證輪椅上樓時的重心平穩。輪椅當上樓時,前輪向上行駛,后輪沿驅動桿伸展,控制輪椅的重心,防止輪椅后傾,極大地提升了輪椅的安全系數和平穩性。本產品還能實現座椅整體的抬升,解決了使用者的空間束縛問題。該設計解決了老齡人上下樓困難和普通上樓輪椅過坎不穩的問題,極大地降低了老人因上樓摔傷的概率。
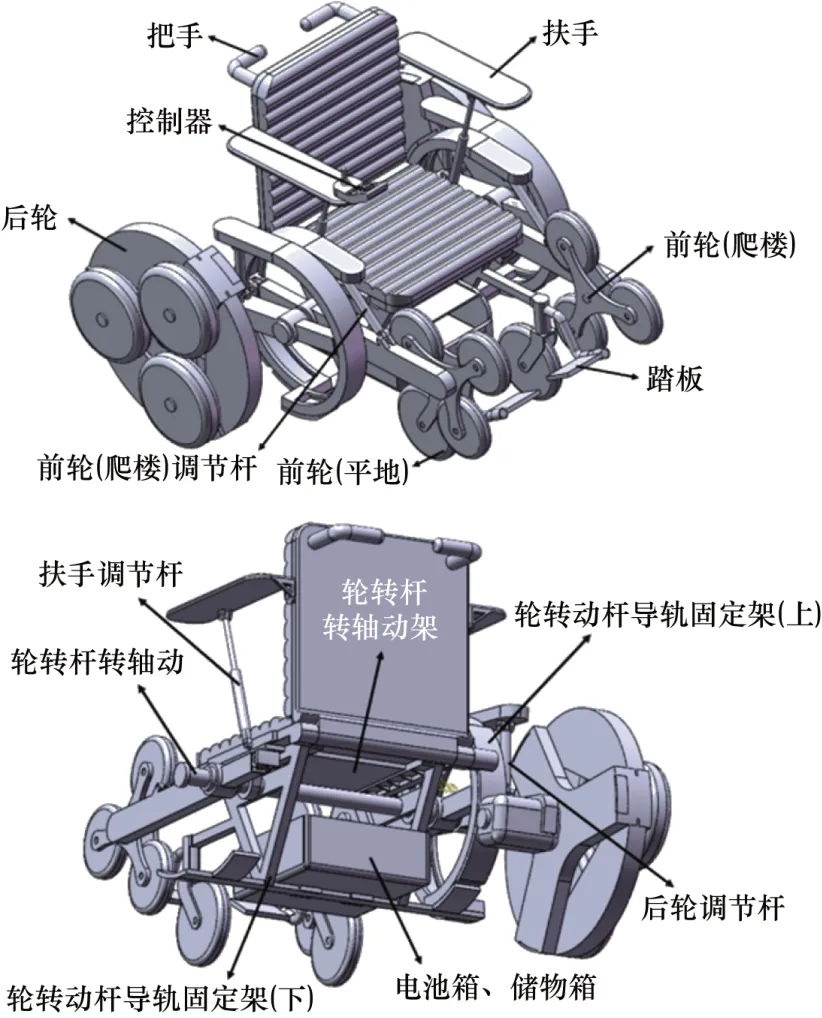
圖1 輪椅主體結構示意圖
1.2 可變式輪體結構
新型輪椅的輪子為可變式輪體,主體采用爬樓式三角輪,在平地時可移動輪面由彈簧彈出,當其完全彈出的時候將其鎖住,使其在平地的輪面為一個完整的大圓,越過障礙物的能力得到提高。在爬樓梯的時候,可移動輪面解鎖,使其遇到樓梯棱角的時候回縮進去,成為一個類似三角輪的可爬樓裝置,如圖2所示。
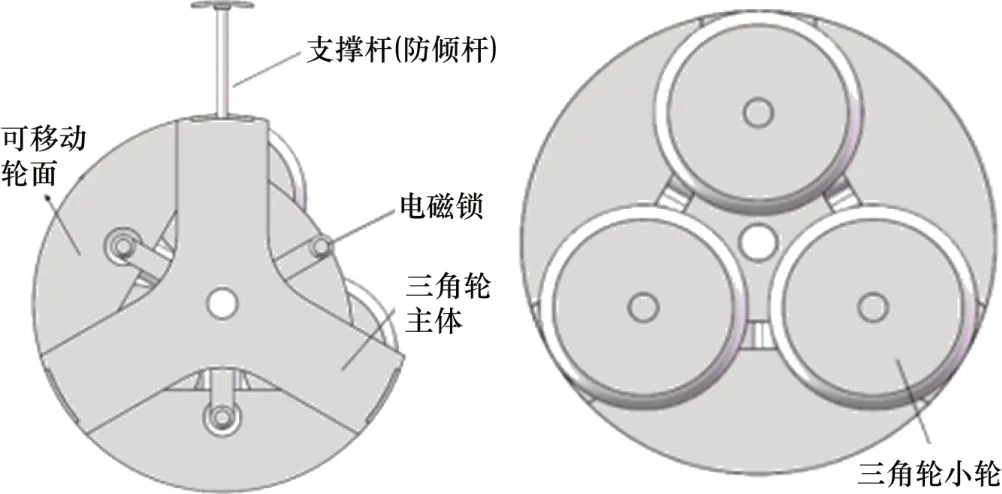
圖2 可變式輪體
利用輪體中間的彈簧結構使其完成輪面的收放過程,如圖3所示。

圖3 可變式輪體彈簧結構
1.3 轉動軸及傳動桿
該輪椅上樓梯的過程中,輪椅傳動軸的轉動僅通過前后輪的運動的不同就可以實現,當前輪爬上前幾級臺階時,輪椅整體傾角過大時,前輪鎖死,后輪前進時,后輪逆時針旋轉,使輪椅主體變為水平,然后轉動桿鎖死,輪椅繼續前進,繼續上述過程。當后輪也爬上樓梯的時候停止轉動軸的傾斜度變化,開始向上爬升,當前輪到達平地時,前輪鎖住,后輪向上爬升,直到轉動桿完全縮回。然后整體上升,當輪椅整體傾角過大時后輪鎖死前輪前進直到輪椅整體再次水平,重復上述過程,直到輪椅整體全部處于平地時結束,傳動桿及其工作演示如圖4~5所示。
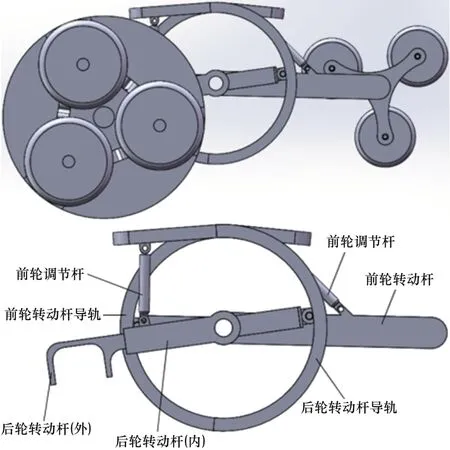
圖4 轉動桿

圖5 轉動軸及轉動伸縮桿原理演示
2 輪椅上樓梯過程描述
輪椅乘坐者在上樓前發出指令,后輪向后運動,將轉動桿的縮入的部件全部伸出并鎖死,前輪(爬樓)調節桿伸長,使前輪(爬樓)下降。
在上樓梯時由前輪(爬樓)先爬上第一級樓梯,隨后前輪(平地)登上第一級臺階,然后鎖死。后輪開始逆時針轉動,使后輪向前運動,后輪調節桿伸長,轉動桿開始轉動,輪椅開始抬升直到座椅主體水平。
前輪允許轉動,后輪允許轉動,后輪開始逆時針轉動,推動輪椅向前移動。由前輪(爬樓)先爬上第二級樓梯,隨后前輪(平地)登上第二級臺階,然后前輪(平地)鎖死。后輪開始逆時針轉動,使后輪向前運動,后輪調節桿伸長,后輪轉動桿開始轉動,輪椅開始抬升直到座椅主體水平。
前輪允許轉動,后輪允許轉動,后輪開始逆時針轉動,推動輪椅向前移動。由前輪(爬樓)先爬上第三級樓梯,隨后前輪(平地)登上第三級臺階,然后前輪(平地)鎖死。后輪開始逆時針轉動,使后輪向前運動,后輪調節桿伸長,后輪轉動桿開始轉動,輪椅開始抬升直到座椅主體水平。后輪繼續前進,當后輪開始爬上樓梯時,接觸樓梯棱角的輪面回縮,與地面接觸三角輪一角的后輪支撐桿伸長,幫助后輪爬上樓梯。
當輪椅整體位于樓梯斜面上,后輪允許轉動,后輪逆時針轉動,將輪椅整體推動向上。并由后輪支撐桿協助使輪椅不斷上爬。
當輪椅前輪(平地)到平地時,前輪繼續向前,當后輪爬上一級臺階后,前輪鎖死,后輪調節桿收縮,轉動軸開始轉動,輪椅開始下降直到座椅主體水平。
重復上述過程直到輪椅整體到達水平面,完成上樓的全部工序過程如圖6~12所示。
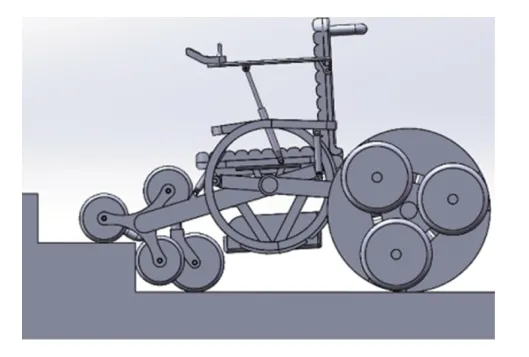
圖6 前輪準備上第一級樓梯
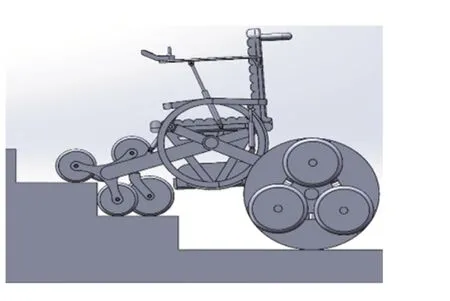
圖7 前輪上第二級樓梯
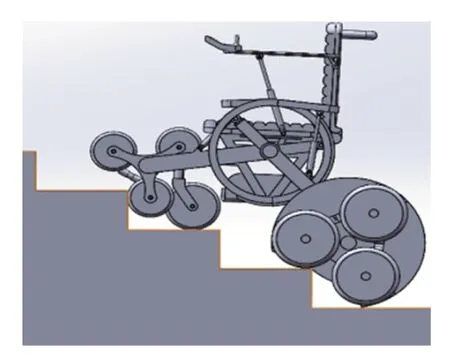
圖8 后輪前進,調節桿伸長使座椅整體水平
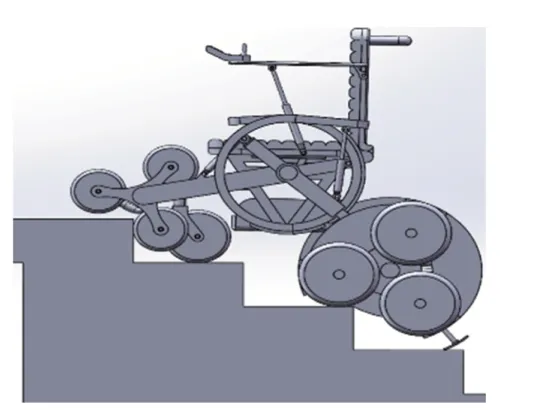
圖9 當后輪前進時,后輪支撐桿伸長,使后輪抬升,并防止傾翻
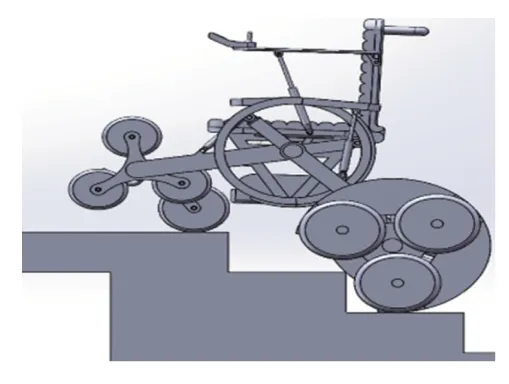
圖10 前后輪前進使輪椅前輪到達樓梯平面
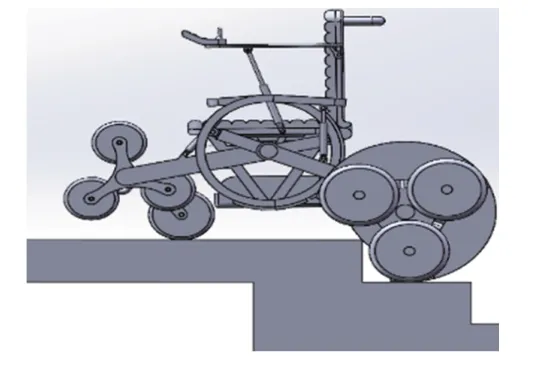
圖11 前后輪前進使輪椅繼續前進,同時后輪調節桿收縮使后輪傾角減小
3 結束語
通過新型可上樓輪椅的設計研究,總結出了以下特點:(1)可上樓機構采用三角輪和彈簧結合的新型輪子,由后輪的運動與后輪調節桿的伸縮來改變輪椅整體的傾角,使得輪椅在樓梯上整體保持水平,使上樓過程更為輕松和安全;(2)座椅升降由輪椅的前輪(爬樓)、前輪調節桿與輪椅的后輪、后輪調節桿相配合,同時改變傾角使得輪椅整體上升。
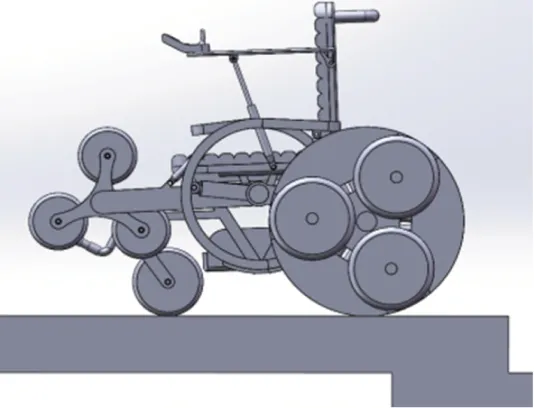
圖12 前后輪前進使輪椅繼續前進,輪椅整體到達平地
產品的主要優勢:(1)安裝可上樓裝置,解決輪椅上樓的困難,提高輪椅上樓的安全系數和舒適度,降低輪椅使用者上下樓時摔傷的機率,給獨居老人和腿腳不便人士出行帶來了便利;(2)安裝座椅可升降裝置,使用者可以無需下輪椅就能拿到高處的物品,能讓使用者生活更方便;(3)市場前景廣闊,人口老齡化越來越嚴重,腿腳不便人員數量不斷增加,人們生活質量的提高導致對此類產品的需求大幅提升。
