基于網(wǎng)絡(luò)的自動(dòng)調(diào)節(jié)教學(xué)系統(tǒng)設(shè)計(jì)
2022-09-22 12:03:46王博趙孟文樊澤明
機(jī)床與液壓 2022年2期
關(guān)鍵詞:界面實(shí)驗(yàn)
王博,趙孟文,樊澤明
(1.西安航空學(xué)院機(jī)械工程學(xué)院,陜西西安 710089;2.西北工業(yè)大學(xué)自動(dòng)化學(xué)院,陜西西安 710072)
0 前言
理論、實(shí)驗(yàn)實(shí)踐教學(xué)這兩個(gè)環(huán)節(jié),本應(yīng)相輔相成自成一體,而目前的傳統(tǒng)教學(xué)模式是以分離模式為向?qū)1],產(chǎn)生了理論教學(xué)在教室、實(shí)驗(yàn)實(shí)踐教學(xué)在實(shí)驗(yàn)室或?qū)嵱?xùn)基地,這種時(shí)空分離的教學(xué)模式,導(dǎo)致了理論教學(xué)、實(shí)驗(yàn)實(shí)踐教學(xué)不能同步進(jìn)行,這樣使得學(xué)生在聽理論課時(shí)不僅理解困難,而且枯燥無味[2]。同時(shí),理論與實(shí)踐教學(xué)由不同老師負(fù)責(zé),理論課教師和實(shí)驗(yàn)教師上課的風(fēng)格節(jié)奏不同,會(huì)讓學(xué)生無所適從。《自動(dòng)控制原理》這樣理論性很強(qiáng)的課程,對(duì)于初學(xué)的學(xué)生來說是很抽象和難學(xué)的。基于此設(shè)計(jì)一套網(wǎng)絡(luò)化自動(dòng)調(diào)節(jié)教學(xué)平臺(tái)[3],使老師在理論課上就能調(diào)動(dòng)實(shí)驗(yàn)資源,幫助學(xué)生理解復(fù)雜、深?yuàn)W的理論知識(shí),同時(shí),學(xué)生也可以課下自行預(yù)約排隊(duì)實(shí)驗(yàn),對(duì)老師所講內(nèi)容實(shí)現(xiàn)鞏固與復(fù)習(xí),最大化實(shí)現(xiàn)理論與實(shí)踐教學(xué)的無縫對(duì)接[4-5]。
1 實(shí)驗(yàn)臺(tái)基本原理
實(shí)驗(yàn)臺(tái)由兩級(jí)機(jī)電伺服單元和機(jī)電加載單元構(gòu)成,由2個(gè)轉(zhuǎn)動(dòng)軸實(shí)現(xiàn)連接,分別為內(nèi)軸和外軸。因?yàn)榻Y(jié)構(gòu)關(guān)系,稱內(nèi)軸為內(nèi)框、外軸為中框。另外還有2個(gè)軸為預(yù)留備用,分別稱為外框和底框。4個(gè)電機(jī)分別安裝在兩個(gè)軸的兩端,通過彈性聯(lián)軸器與軸相連,每個(gè)軸的其中一端安裝一個(gè)交流伺服電機(jī),用于位置控制,另一端安裝直流力矩電機(jī)。力矩電機(jī)能夠給出各種力矩信號(hào),這個(gè)信號(hào)可以作為運(yùn)動(dòng)控制電機(jī)的力矩干擾信號(hào)或負(fù)載信號(hào)。不同的軸,電機(jī)型號(hào)和規(guī)格不同。每個(gè)軸分別安裝多種不同的傳感器,可以采集角位移、速度、力矩等各種反饋信號(hào)。實(shí)驗(yàn)臺(tái)外觀及布局如圖1所示。

圖1 實(shí)驗(yàn)臺(tái)外觀及布局
轉(zhuǎn)臺(tái)的各種電機(jī)及其傳感器與各自的驅(qū)動(dòng)器相連,同時(shí)工控機(jī)內(nèi)部安裝板卡,板卡端子與驅(qū)動(dòng)器相連,實(shí)現(xiàn)工控機(jī)與驅(qū)動(dòng)器的通信,進(jìn)而實(shí)現(xiàn)了控制與反饋數(shù)據(jù)的傳輸。
工控機(jī)采用NI公司測(cè)控軟件LabWindows/CVI,利用該軟件編寫C語言程序,借助其強(qiáng)大功能可實(shí)現(xiàn)計(jì)算機(jī)控制系統(tǒng)的搭建。平臺(tái)分為本地部分和遠(yuǎn)程部分。本地部分有自己的測(cè)控界面,通過修改C語言代碼可實(shí)現(xiàn)各種控制算法的加入。本地測(cè)控界面支持開環(huán)、單位反饋以及數(shù)字PID實(shí)驗(yàn),可將其運(yùn)動(dòng)曲線以及傳感器數(shù)據(jù)顯示在界面上。遠(yuǎn)程通過打開360瀏覽器輸入實(shí)驗(yàn)臺(tái)服務(wù)器網(wǎng)址,即可進(jìn)入網(wǎng)絡(luò)遠(yuǎn)程界面,進(jìn)入界面即可預(yù)約實(shí)驗(yàn)。網(wǎng)絡(luò)實(shí)驗(yàn)界面包括實(shí)時(shí)在線視頻和實(shí)時(shí)傳感器數(shù)據(jù)。
1.1 實(shí)驗(yàn)系統(tǒng)本地部分
實(shí)驗(yàn)系統(tǒng)本地部分構(gòu)成了系統(tǒng)的主體,它決定了系統(tǒng)的主要功能及結(jié)構(gòu),內(nèi)軸、外軸伺服電機(jī)控制系統(tǒng)結(jié)構(gòu)相同。內(nèi)、外軸采樣周期為0.02 s;閉環(huán)輸入為角度指令,范圍是0~360°;輸出為角位移,單位是(°)。圖2所示為伺服電機(jī)控制系統(tǒng)方框圖,其中給定元件、比較元件、校正元件均為工控機(jī)及CVI測(cè)控軟件。工控機(jī)通過串口與伺服電機(jī)驅(qū)動(dòng)器相連,驅(qū)動(dòng)器輸出電壓控制伺服電機(jī);光電編碼器構(gòu)成測(cè)量元件檢測(cè)位置脈沖個(gè)數(shù),伺服驅(qū)動(dòng)器根據(jù)光電編碼器傳來的數(shù)據(jù)計(jì)算位置及速度信號(hào);最后,通過Moxa卡傳回主控計(jì)算機(jī)構(gòu)成閉環(huán)系統(tǒng)。

圖2 伺服電機(jī)控制系統(tǒng)結(jié)構(gòu)
內(nèi)、外軸力矩電機(jī)控制系統(tǒng)結(jié)構(gòu)相同,內(nèi)、外軸閉環(huán)輸入為力矩指令,范圍是0~4;輸出為力矩,當(dāng)力矩電機(jī)作為干擾給伺服電機(jī)加力時(shí),輸入范圍為0~1。圖3所示為力矩電機(jī)控制系統(tǒng)方框圖,其中給定元件、比較元件、校正元件均為工控機(jī)及CVI測(cè)控軟件;工控機(jī)通過PCI8932數(shù)據(jù)采集卡與力矩電機(jī)驅(qū)動(dòng)器相連,力矩電機(jī)通過PCI8932DA輸出控制力矩電機(jī)電樞繞組電壓(單極性);通過PCI8932DO控制力矩電機(jī)方向;驅(qū)動(dòng)器輸出電壓控制伺服電機(jī),光電編碼器和力矩驅(qū)動(dòng)器構(gòu)成測(cè)量元件檢測(cè)位置脈沖個(gè)數(shù)和采集電流;伺服驅(qū)動(dòng)器和力矩驅(qū)動(dòng)器根據(jù)電流和脈沖計(jì)算力矩、位置及速度并轉(zhuǎn)換為原碼后存儲(chǔ);最后,通過Moxa卡傳回主控計(jì)算機(jī),構(gòu)成閉環(huán)系統(tǒng)。

圖3 力矩電機(jī)控制系統(tǒng)結(jié)構(gòu)
1.2 實(shí)驗(yàn)系統(tǒng)遠(yuǎn)程部分
遠(yuǎn)程部分依托于TCP/IP技術(shù)與Web界面通過服務(wù)器實(shí)現(xiàn)網(wǎng)絡(luò)連接[6],可以實(shí)時(shí)采集網(wǎng)絡(luò)實(shí)驗(yàn)臺(tái)的傳感器數(shù)據(jù)并在網(wǎng)絡(luò)端實(shí)現(xiàn)計(jì)算機(jī)控制閉環(huán)。網(wǎng)絡(luò)端支持兩種模式:一種為直接輸入控制參數(shù)進(jìn)行對(duì)應(yīng)的開環(huán)、閉環(huán)以及PID控制;另外一種為網(wǎng)絡(luò)在線編程模式,提供閉環(huán)所需要的變量,即控制量與反饋量。可以自行設(shè)計(jì)控制器并實(shí)時(shí)驗(yàn)證控制效果,網(wǎng)絡(luò)控制采樣周期為0.05 s。圖4所示為網(wǎng)絡(luò)化系統(tǒng)結(jié)構(gòu),與傳統(tǒng)的無網(wǎng)絡(luò)現(xiàn)場(chǎng)式控制系統(tǒng)相比,網(wǎng)絡(luò)控制系統(tǒng)具有很多優(yōu)點(diǎn):(1)系統(tǒng)成本低;(2)系統(tǒng)柔性強(qiáng)、可靠性高;(3)系統(tǒng)靈活性強(qiáng)、易于擴(kuò)展;(4)易于安裝維護(hù),便于進(jìn)行故障診斷;(5)信息資源能共享;(6)可實(shí)現(xiàn)復(fù)雜的大系統(tǒng)和遠(yuǎn)程控制[7]。
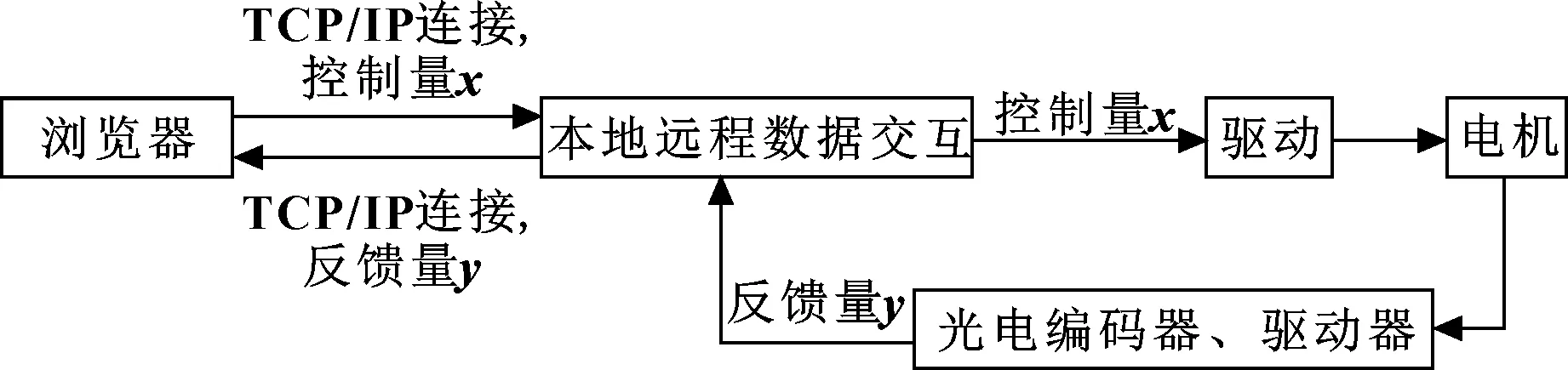
圖4 網(wǎng)絡(luò)化控制系統(tǒng)結(jié)構(gòu)
2 實(shí)驗(yàn)臺(tái)硬件構(gòu)成
(1)實(shí)驗(yàn)臺(tái)動(dòng)力總成。實(shí)驗(yàn)臺(tái)由內(nèi)軸、外軸組成,每一個(gè)軸依次由交流伺服電機(jī)、聯(lián)軸器、框體、聯(lián)軸器、直流力矩電機(jī)組成。伺服、力矩電機(jī)選型如下:內(nèi)外伺服電機(jī)為臺(tái)達(dá)ECMA-CA0604RS;內(nèi)外力矩電機(jī)為北京永光高特110LYX01F。
(2)動(dòng)力總成接線。交流伺服電機(jī)由前端的電機(jī)本體與尾部的編碼器組成。電機(jī)本體接頭通過轉(zhuǎn)臺(tái)內(nèi)部線路與電機(jī)驅(qū)動(dòng)器的u、v、w快速接頭連接,負(fù)責(zé)電機(jī)供電、調(diào)速、換向等功能,伺服電機(jī)為單相220 V供電。電機(jī)尾部的編碼器由信號(hào)正負(fù)、電源正負(fù)、電池盒正負(fù)6根線組成,同樣通過轉(zhuǎn)臺(tái)內(nèi)部線路與電機(jī)驅(qū)動(dòng)器CN2快速接頭相連,負(fù)責(zé)采集伺服電機(jī)的位移、速度、力矩等信息,采集到的信息暫時(shí)儲(chǔ)存在驅(qū)動(dòng)器內(nèi),等待與工控機(jī)的數(shù)據(jù)交互。直流力矩電機(jī)僅通過兩根線經(jīng)過轉(zhuǎn)臺(tái)內(nèi)部線路與驅(qū)動(dòng)器相連。這兩根線即為加在電樞繞組上的24 V電源正負(fù)。通過這兩根線驅(qū)動(dòng)器即可控制電樞繞組兩端電壓,實(shí)現(xiàn)控制力矩輸出大小的功能,并且可以采集其電流,通過系數(shù)換算(直流電機(jī)力矩與電樞電流成正比)得到力矩電機(jī)輸出的力。具體接線如圖5所示。

圖5 實(shí)驗(yàn)臺(tái)電機(jī)驅(qū)動(dòng)器接線
(3)數(shù)控板卡。此教學(xué)平臺(tái)一共使用了3塊測(cè)控板卡[8],分別為1塊阿爾泰科技PCI8932(AD/DA;DI/DO)以及2塊MOXACP-134U(1塊板卡可實(shí)現(xiàn)4路485通信,2個(gè)伺服電機(jī)用1塊卡通信,2個(gè)力矩電機(jī)用1塊卡通信,剩下的用于后期擴(kuò)展。3塊板卡均通過工控機(jī)內(nèi)部的PCI卡槽與工控機(jī)相連。PCI8932有4路DA輸出,其中第1路和第2路對(duì)應(yīng)內(nèi)、外軸2個(gè)力矩電機(jī)的模擬量輸入接口,該板卡可以通過控制DA輸出的大小控制力矩電機(jī)(與力矩電機(jī)驅(qū)動(dòng)器COM端以及AI1/AI2端相連)的轉(zhuǎn)速/力矩。PCI8932有16路DO/DI,其中2路DO依次與內(nèi)、外軸2個(gè)力矩電機(jī)驅(qū)動(dòng)器的DE端相連,控制對(duì)應(yīng)力矩電機(jī)的方向,串口卡MOXACP-134U板卡插入PCI卡槽后,將其側(cè)面接頭與一轉(zhuǎn)四轉(zhuǎn)接器相連,無需改變撥碼開關(guān),安裝驅(qū)動(dòng)即可與工控機(jī)進(jìn)行通信。轉(zhuǎn)接器與4路兩線485相連,實(shí)現(xiàn)伺服電機(jī)驅(qū)動(dòng)器(控制信號(hào)與采集信號(hào)交互)、力矩電機(jī)驅(qū)動(dòng)器(電流反饋)與工控機(jī)的通信[8]。外接線過程中會(huì)用到一些接線端子,作用為將細(xì)小的板卡接頭放大為可直接與電線相連的接線端子。板卡接線端子板如圖6所示。
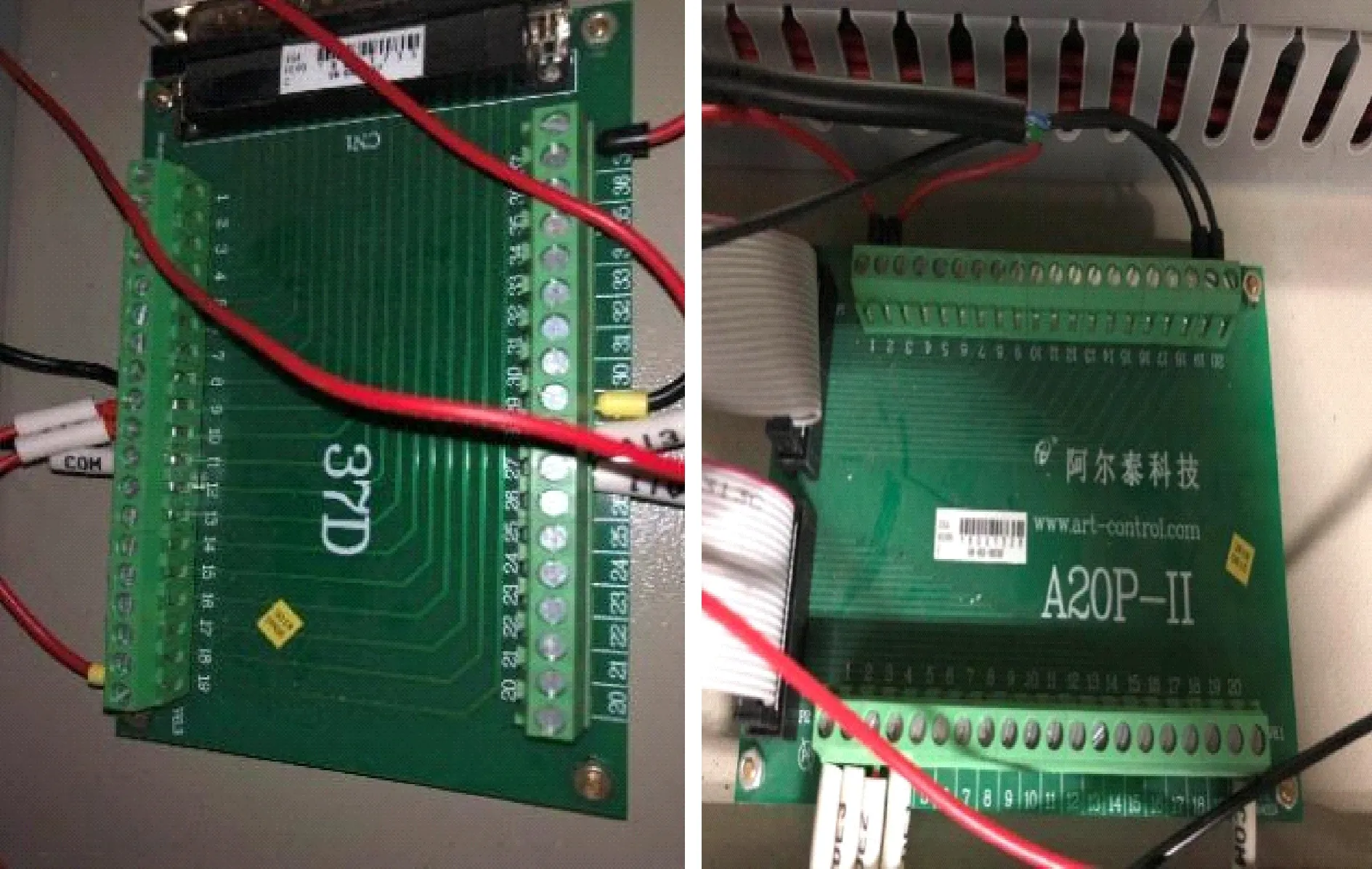
圖6 板卡接線端子板
3 實(shí)驗(yàn)臺(tái)軟件設(shè)計(jì)
(1)本地軟件設(shè)計(jì)。實(shí)驗(yàn)臺(tái)軟件本地測(cè)控程序采用LabWindows/CVI進(jìn)行編寫[9],界面設(shè)計(jì)劃分為3個(gè)分區(qū),分別為電機(jī)控制區(qū)、啟動(dòng)與模式選擇區(qū)、記錄曲線與數(shù)據(jù)區(qū)[10],具體如圖7、圖8、圖9所示。
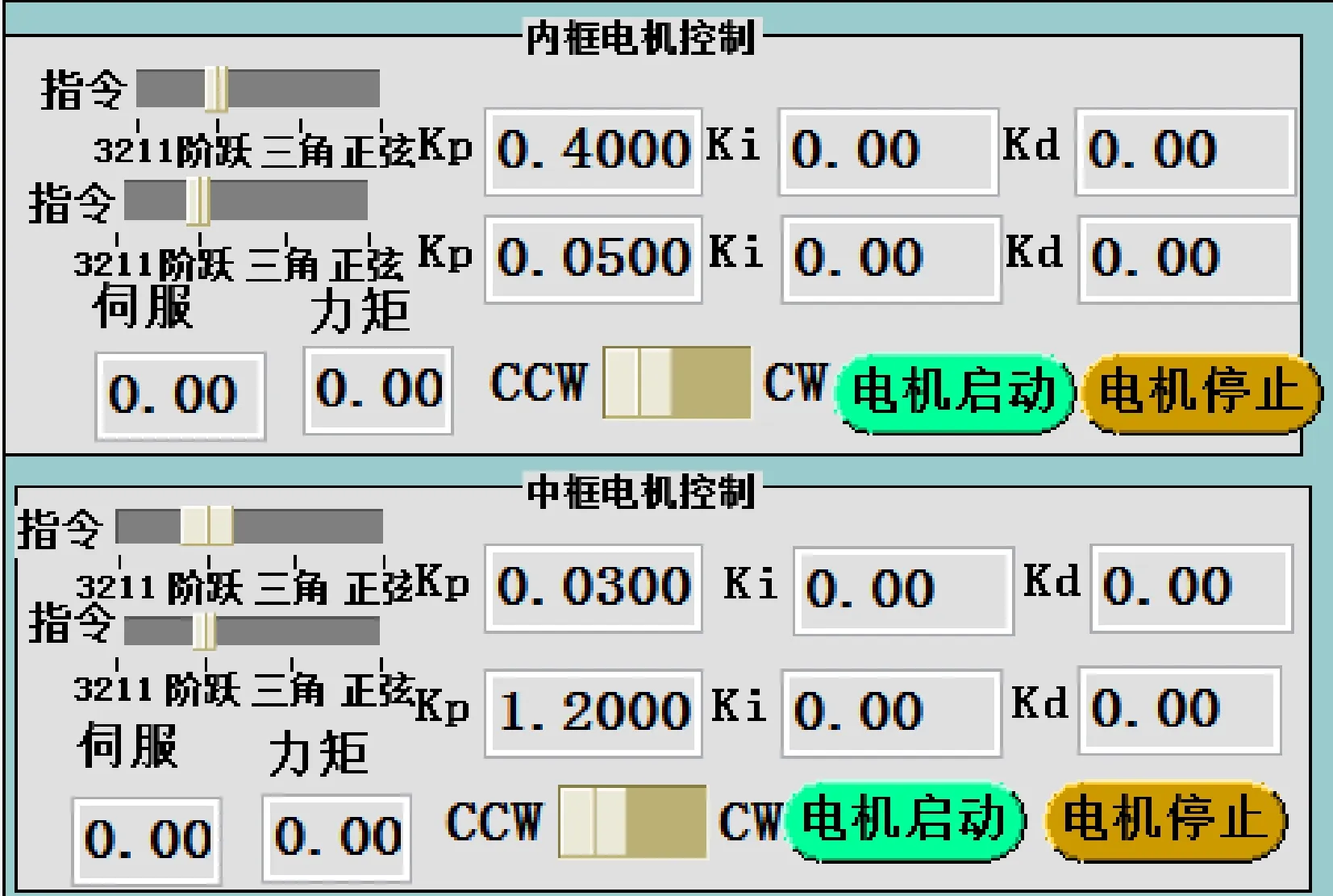
圖7 電機(jī)控制
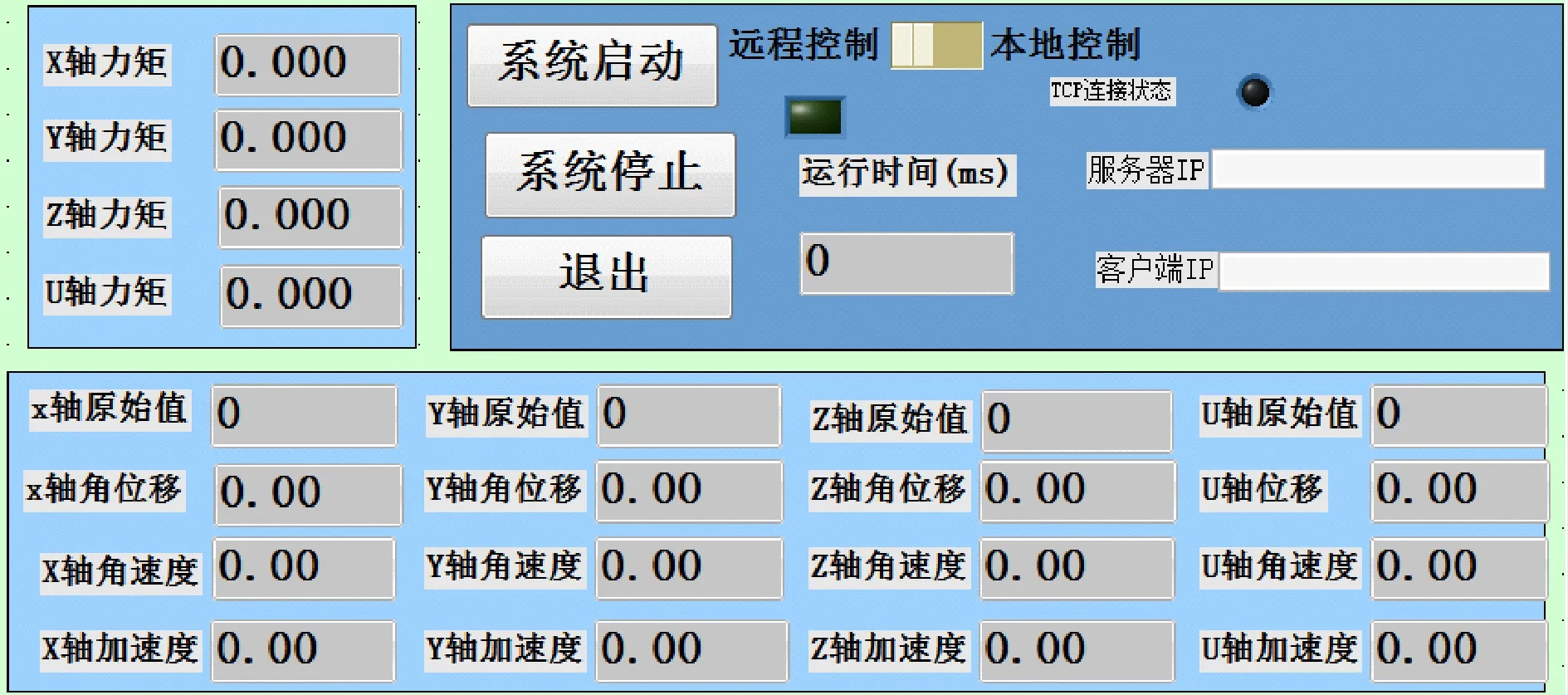
圖8 啟動(dòng)與模式
圖9 數(shù)據(jù)記錄
(2)Web遠(yuǎn)程操作界面設(shè)計(jì)。該遠(yuǎn)程控制界面采用了樊澤明教授的發(fā)明專利“一種理論與實(shí)驗(yàn)一體化同步教學(xué)系統(tǒng)”,實(shí)驗(yàn)臺(tái)遠(yuǎn)程操作界面利用JavaScript編寫[11],圖10所示為針對(duì)實(shí)驗(yàn)臺(tái)所開發(fā)的遠(yuǎn)程實(shí)驗(yàn)控制界面。該實(shí)驗(yàn)界面由現(xiàn)場(chǎng)視頻、采集顯示和操作界面三部分構(gòu)成[12]。現(xiàn)場(chǎng)視頻負(fù)責(zé)實(shí)時(shí)監(jiān)測(cè)實(shí)驗(yàn)室內(nèi)設(shè)備的運(yùn)行狀態(tài),采集顯示負(fù)責(zé)將傳回的傳感器采集數(shù)據(jù)以曲線的形式在頁面顯示,操作界面提供實(shí)驗(yàn)排隊(duì)、控制參數(shù)設(shè)定等操作功能。
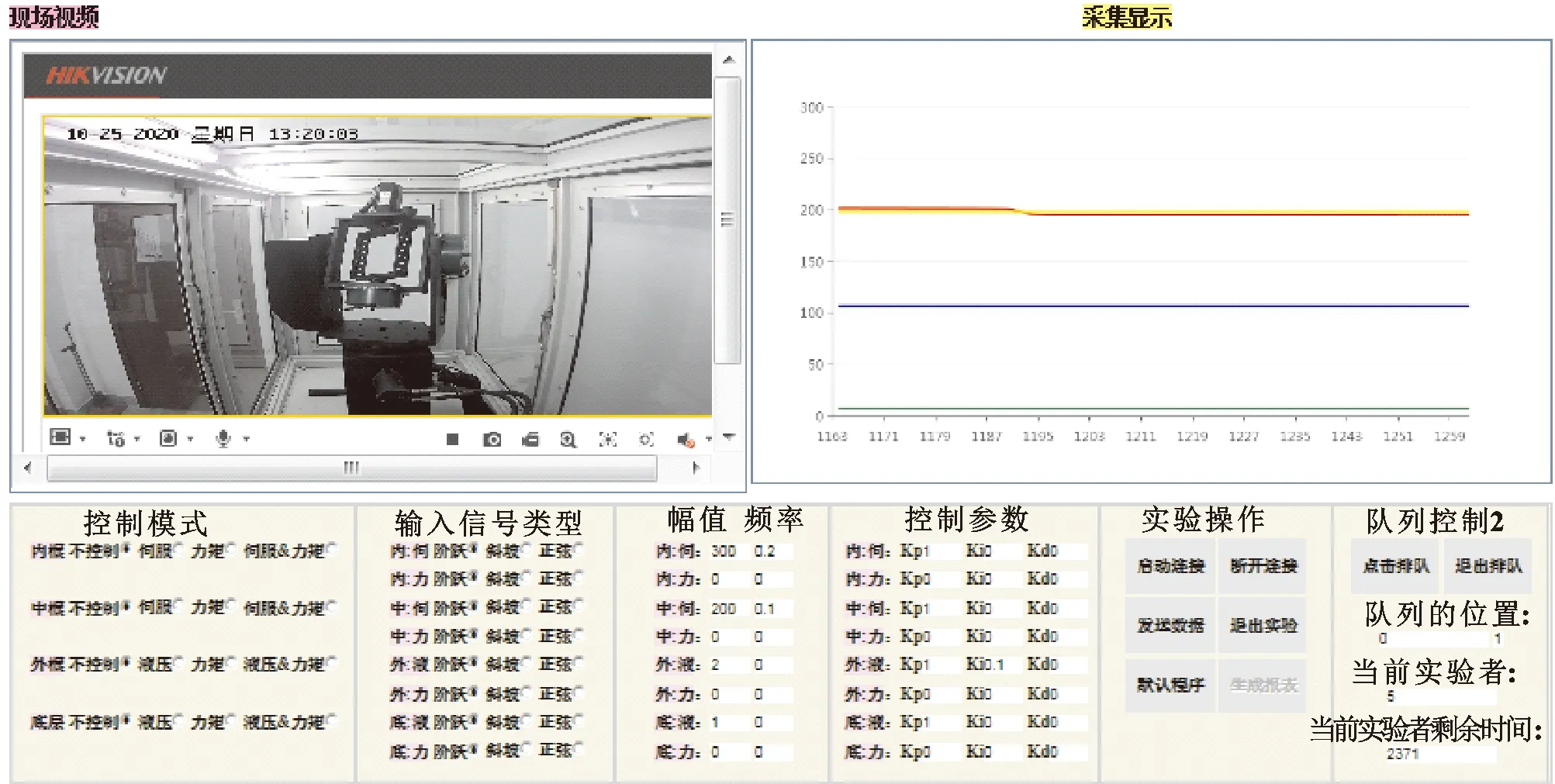
圖10 遠(yuǎn)程操作界面
4 實(shí)驗(yàn)效果展示
開始實(shí)驗(yàn)前,學(xué)生需要先登錄并“點(diǎn)擊排隊(duì)”,如圖11所示,若此時(shí)設(shè)備空閑,則直接進(jìn)入實(shí)驗(yàn),否則等待隊(duì)列之前的學(xué)生完成實(shí)驗(yàn)后,方可進(jìn)入實(shí)驗(yàn)。系統(tǒng)為學(xué)生權(quán)限分配的實(shí)驗(yàn)時(shí)間為5 min,教師為45 min。若計(jì)時(shí)結(jié)束前未“退出實(shí)驗(yàn)”,系統(tǒng)會(huì)自動(dòng)移除當(dāng)前實(shí)驗(yàn)用戶,將隊(duì)列中的用戶按順序推入實(shí)驗(yàn)。
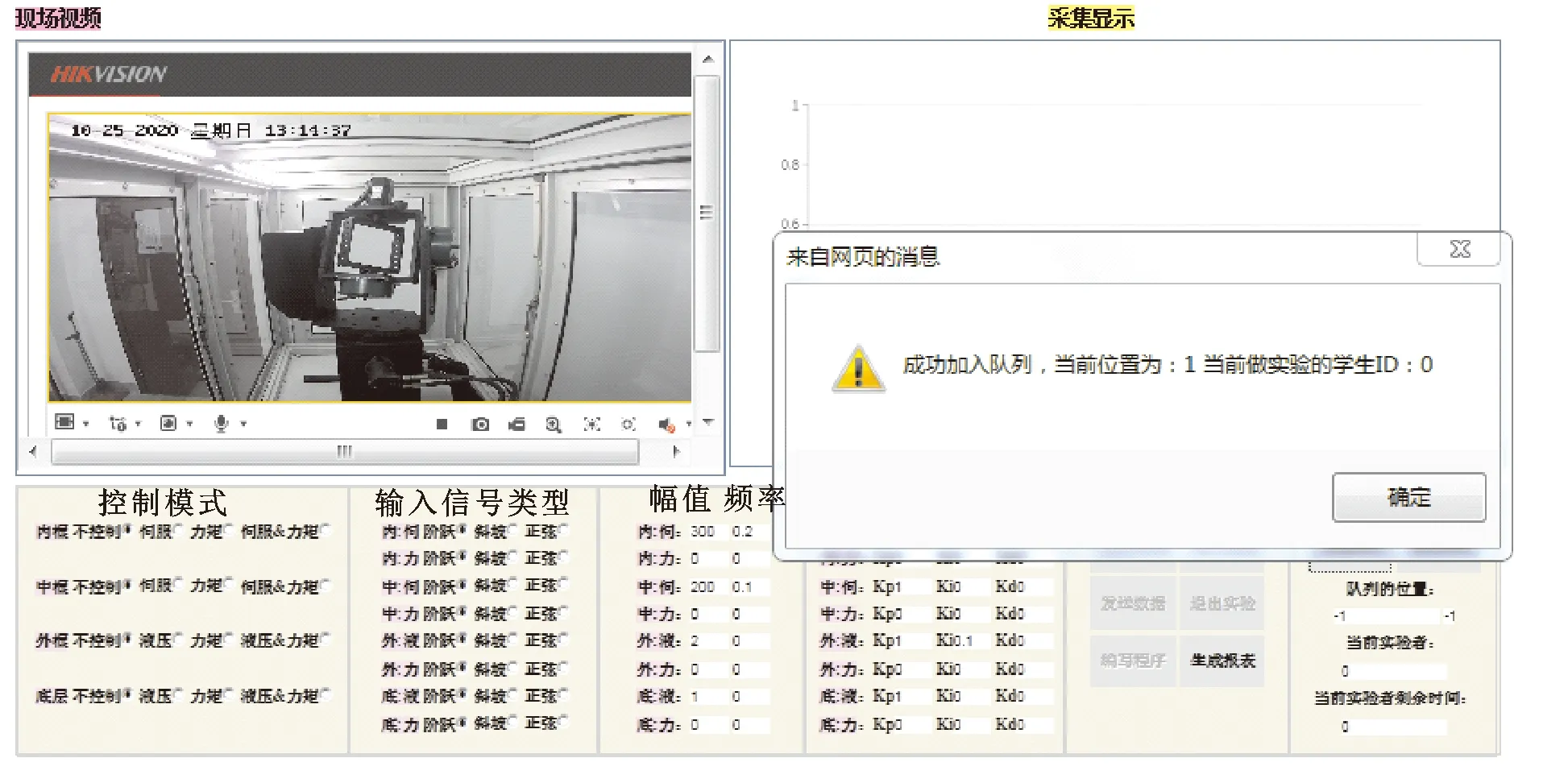
圖11 排隊(duì)界面
然后,點(diǎn)擊編寫程序,彈出程序編寫窗口,學(xué)生將記事本中預(yù)先寫好的程序復(fù)制進(jìn)該窗口,如果熟練也可以直接進(jìn)行編程,然后依次點(diǎn)擊提交編譯、生成代碼、發(fā)送數(shù)據(jù)。數(shù)據(jù)顯示界面、圖像顯示界面分別如圖12、圖10所示。在圖12中可以看到實(shí)時(shí)數(shù)據(jù),包括該軸目前角位移情況,可以看出角位移為202.54°、目標(biāo)值為200°。內(nèi)框PID控制程序如下:
內(nèi)框伺服(控制角度在0~360°):
var error;//誤差
var error_sum=0;//誤差和
var error_last=0;//上一拍誤差
var p,i,d;//比例、積分、微分控制量
var goal=200;//目標(biāo)值
var KP=4;//比例系數(shù)
var KI=0.2;//積分系數(shù)
var KD=0;//微分系數(shù)
function diyCirculate()
{
command[0]=1;//開定時(shí)器
command[1]=1;//
error = goal-feedback[0];
p = KP * error;
error_sum += error;
i = KI * error_sum*0.05;
d = KD *(error-error_last)/0.05;
error_last = error;
command[9]= p+i+d;
}
把目標(biāo)值改為var goal=150時(shí),PI控制器輸出曲線如圖13所示。可以看出:控制效果不好,超調(diào)太大,還有穩(wěn)態(tài)誤差[13]。主要原因是代碼中微分系數(shù)是0,導(dǎo)致系統(tǒng)中缺乏阻尼作用,積分系數(shù)不夠[14]。這時(shí)把KD設(shè)為1.2、KI設(shè)為0.7再次提交編譯[15]、生成代碼、發(fā)送數(shù)據(jù),記錄曲線如圖14所示,可以看出性能改善明顯。
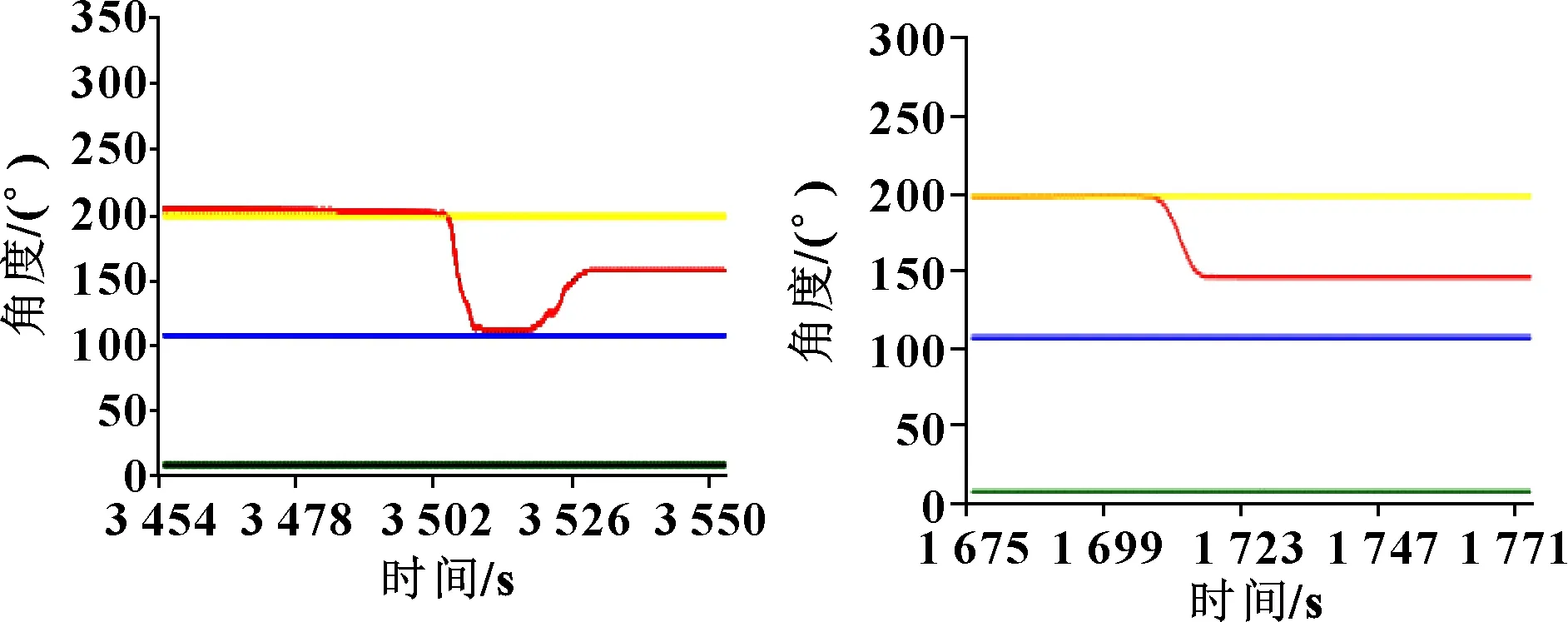
圖13 PI控制器輸出曲線 圖14 改進(jìn)后PID控制器輸出曲線
5 結(jié)束語
網(wǎng)絡(luò)化的自動(dòng)調(diào)節(jié)教學(xué)系統(tǒng),使教師教學(xué)、學(xué)生學(xué)習(xí)突破了時(shí)空限制,教師在課堂上講解復(fù)雜深?yuàn)W的控制理論知識(shí)的同時(shí),能夠通過網(wǎng)絡(luò)使課堂快速轉(zhuǎn)接至實(shí)驗(yàn)室,使學(xué)生能趁熱打鐵,迅速掌握所學(xué)理論知識(shí),同時(shí)也能將理論聯(lián)系實(shí)際。學(xué)生通過網(wǎng)絡(luò),也可以隨時(shí)注冊(cè)登錄實(shí)驗(yàn)臺(tái)服務(wù)器網(wǎng)址,隨時(shí)隨地進(jìn)行專業(yè)化實(shí)驗(yàn)訓(xùn)練,使寶貴的實(shí)驗(yàn)設(shè)備最大化地為廣大師生提供服務(wù)。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
當(dāng)代陜西(2020年13期)2020-08-24 08:22:02
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
制造技術(shù)與機(jī)床(2017年5期)2018-01-19 02:49:17
金秋(2017年4期)2017-06-07 08:22:16
中國(guó)材料進(jìn)展(2016年10期)2016-12-26 06:50:20
濰坊學(xué)院學(xué)報(bào)(2016年2期)2016-12-01 13:00:11
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55