一種水面垃圾清理機(jī)器人設(shè)計(jì)
2022-09-23 09:18:52張芙蓉湯澤軍
技術(shù)與市場(chǎng) 2022年9期
張芙蓉,湯澤軍
(長(zhǎng)沙航空職業(yè)技術(shù)學(xué)院,湖南 長(zhǎng)沙 410124)
0 引言
現(xiàn)有的水面垃圾清理機(jī)制尚不成熟,以城市人工湖等靜態(tài)水域?yàn)槔蠖鄶?shù)清理工作都是由人工作業(yè)完成,清潔工人一整天都要在河道內(nèi)清潔垃圾,不但浪費(fèi)大量人力、物力,也影響景點(diǎn)的美觀;后續(xù)出現(xiàn)的垃圾清理船,對(duì)于一些懸浮于水中的垃圾清理效果差,且對(duì)于垃圾的清理效率低。為解決上述問(wèn)題,本文設(shè)計(jì)了一種針對(duì)靜態(tài)水域水面漂浮物的無(wú)人操作水面垃圾清理機(jī)器人。
1 系統(tǒng)整體設(shè)計(jì)
水面垃圾清理機(jī)器人系統(tǒng)由水面垃圾清理機(jī)器人和遠(yuǎn)程遙控平臺(tái)兩部分構(gòu)成,系統(tǒng)總體設(shè)計(jì)框圖如圖1所示。水面垃圾清理機(jī)器人由傳感器模塊、電源模塊、水面垃圾清理機(jī)器人控制器模塊、執(zhí)行模塊以及通信遙控系統(tǒng)等組成。
1.1 傳感器模塊
傳感器模塊包括攝像頭識(shí)別傳感器、超聲波距離傳感器、風(fēng)速風(fēng)向傳感器、GPS定位傳感器、姿態(tài)檢測(cè)傳感器和垃圾箱滿(mǎn)傳感器等。傳感器模塊可實(shí)時(shí)獲取湖面垃圾視頻、障礙物距離,風(fēng)速和風(fēng)向等環(huán)境信息、機(jī)器人GPS位置和姿態(tài)、垃圾箱狀態(tài)等信息。
1.2 水面垃圾清理機(jī)器人控制器模塊
水面垃圾清理機(jī)器人控制器模塊采用AIstart人工智能主機(jī),它包括一塊K210核心主控,集成了攝像頭、TF存儲(chǔ)卡、LCD顯示、左右聲道喇叭、耳機(jī)接口、USB Type-C、RGB全彩燈、多功能按鍵、GPIO拓展端口等資源。K210核心主控是基于雙核RISC-V 64位處理器,RISC-V是開(kāi)源指令集架構(gòu)(ISA),指令簡(jiǎn)單且高效。邊緣計(jì)算的KPU進(jìn)行神經(jīng)網(wǎng)絡(luò)加速,官方Demo中提供了一些人臉檢測(cè)、圖像識(shí)別、圖像分類(lèi)的視覺(jué)任務(wù),分類(lèi)任務(wù)的分類(lèi)網(wǎng)絡(luò)推理速度最高可達(dá)到240 fps。檢測(cè)任務(wù)在QVGA的網(wǎng)絡(luò)下,模型幀率最高可達(dá)35 fps。乘法操作算力0.23TOPS,總算力1TOPS,芯片內(nèi)置多種硬件加速單元(如CNN,F(xiàn)FT,SHA256等),及8 M超大高速SRAM,實(shí)現(xiàn)機(jī)器視覺(jué)算法;1TOPS算力,只有0.3 W的功耗。可通過(guò)傳感器模塊的輸入信息對(duì)水面漂浮物進(jìn)行識(shí)別,實(shí)現(xiàn)水面清理路線(xiàn)規(guī)劃,達(dá)到自動(dòng)清理垃圾的目的。
1.3 電源模塊
電源模塊由充電電池和太陽(yáng)能電板構(gòu)成。充電電池采用12 V、60 Ah的3串20并18650電池組,充電可通過(guò)岸邊市電適配器充電,電池電量信息能本地顯示。機(jī)器人水面工作時(shí),可把電量信息無(wú)線(xiàn)傳送給遠(yuǎn)程遙控平臺(tái);太陽(yáng)能電板可對(duì)充電電池進(jìn)行充電,可提升系統(tǒng)的續(xù)航能力。
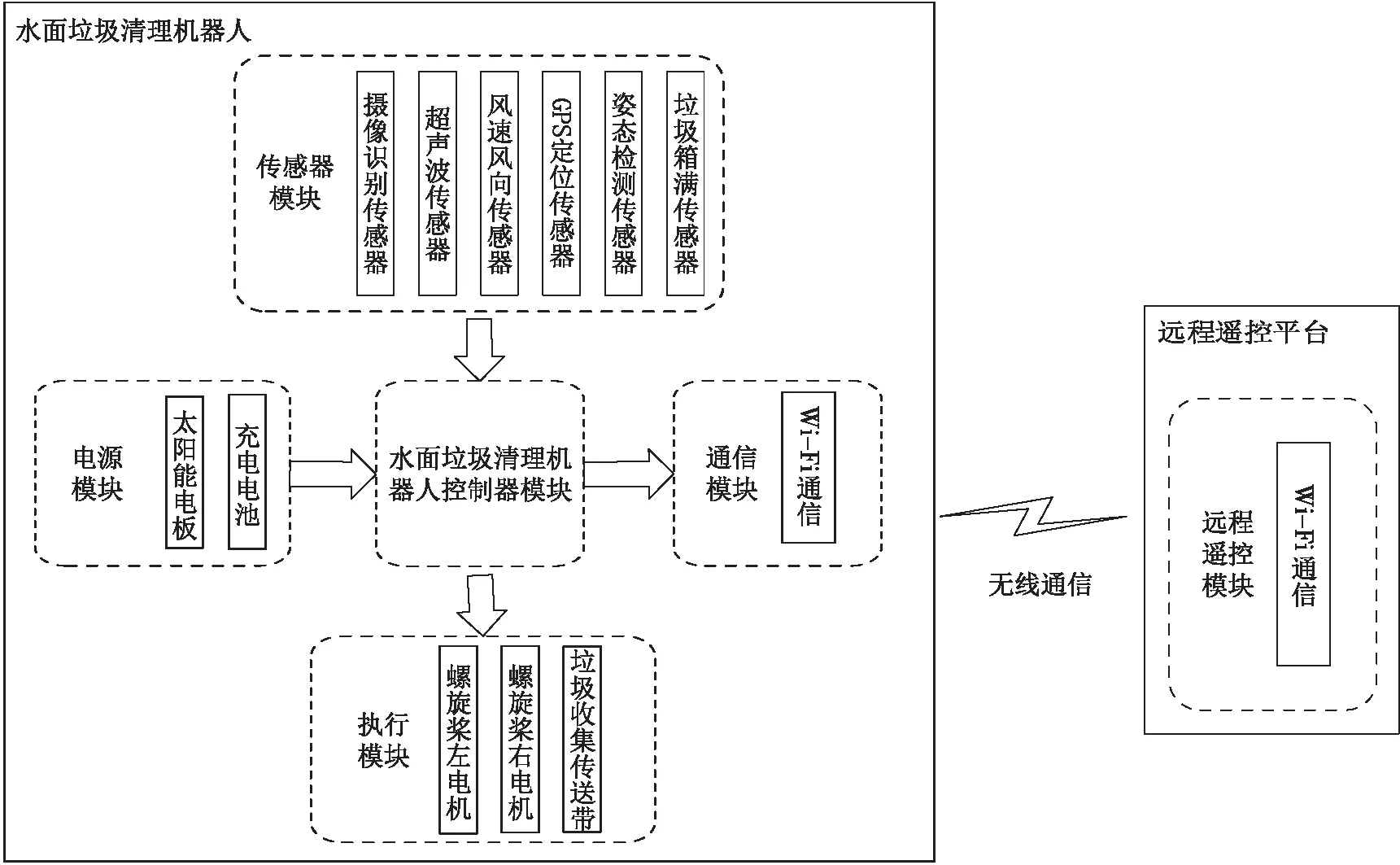
圖1 系統(tǒng)總體設(shè)計(jì)框圖
1.4 執(zhí)行模塊
執(zhí)行模塊由螺旋槳左電機(jī)、螺旋槳右電機(jī)、垃圾收集傳送帶電機(jī)和驅(qū)動(dòng)構(gòu)成。執(zhí)行模塊由水面垃圾清理機(jī)器人控制器模塊進(jìn)行控制,對(duì)螺旋槳左右電機(jī)進(jìn)行驅(qū)動(dòng),實(shí)現(xiàn)機(jī)器人在湖面的移動(dòng);對(duì)垃圾收集傳送帶電機(jī)進(jìn)行驅(qū)動(dòng),把水面垃圾經(jīng)垃圾收集傳送帶傳送到垃圾箱。
1.5 通信模塊
通信模塊通過(guò)Wi-Fi模塊實(shí)現(xiàn)水面垃圾清理機(jī)器人與遠(yuǎn)程遙控平臺(tái)通信,實(shí)現(xiàn)遠(yuǎn)程視頻信息、狀態(tài)信息、遙控指令信息的傳輸。遠(yuǎn)程遙控平臺(tái)可控制機(jī)器人工作模式,獲取機(jī)器人攝像頭工作視頻、機(jī)器人狀態(tài),遙控機(jī)器人進(jìn)行動(dòng)作。
2 結(jié)構(gòu)設(shè)計(jì)
水面垃圾清理機(jī)器人采用流體型結(jié)構(gòu)設(shè)計(jì),大大降低航行阻力。前置超聲波傳感器和攝像頭,左右各放置超聲波傳感器,能識(shí)別垃圾目標(biāo),測(cè)量障礙物距離,從而更適應(yīng)復(fù)雜水域環(huán)境。垃圾箱位置設(shè)計(jì)在船體中間,可有效防止船體側(cè)翻。輔助姿態(tài)傳感器和風(fēng)速風(fēng)向傳感器獲取機(jī)器人狀態(tài),進(jìn)一步提高船體穩(wěn)定性。充電電池放置船體中后方,可提升船頭,壓低船尾,提升航速。左右螺旋槳推動(dòng)設(shè)計(jì),可縮小掉頭半徑,實(shí)現(xiàn)原地掉頭和倒退。結(jié)構(gòu)設(shè)計(jì)框圖如圖2所示。
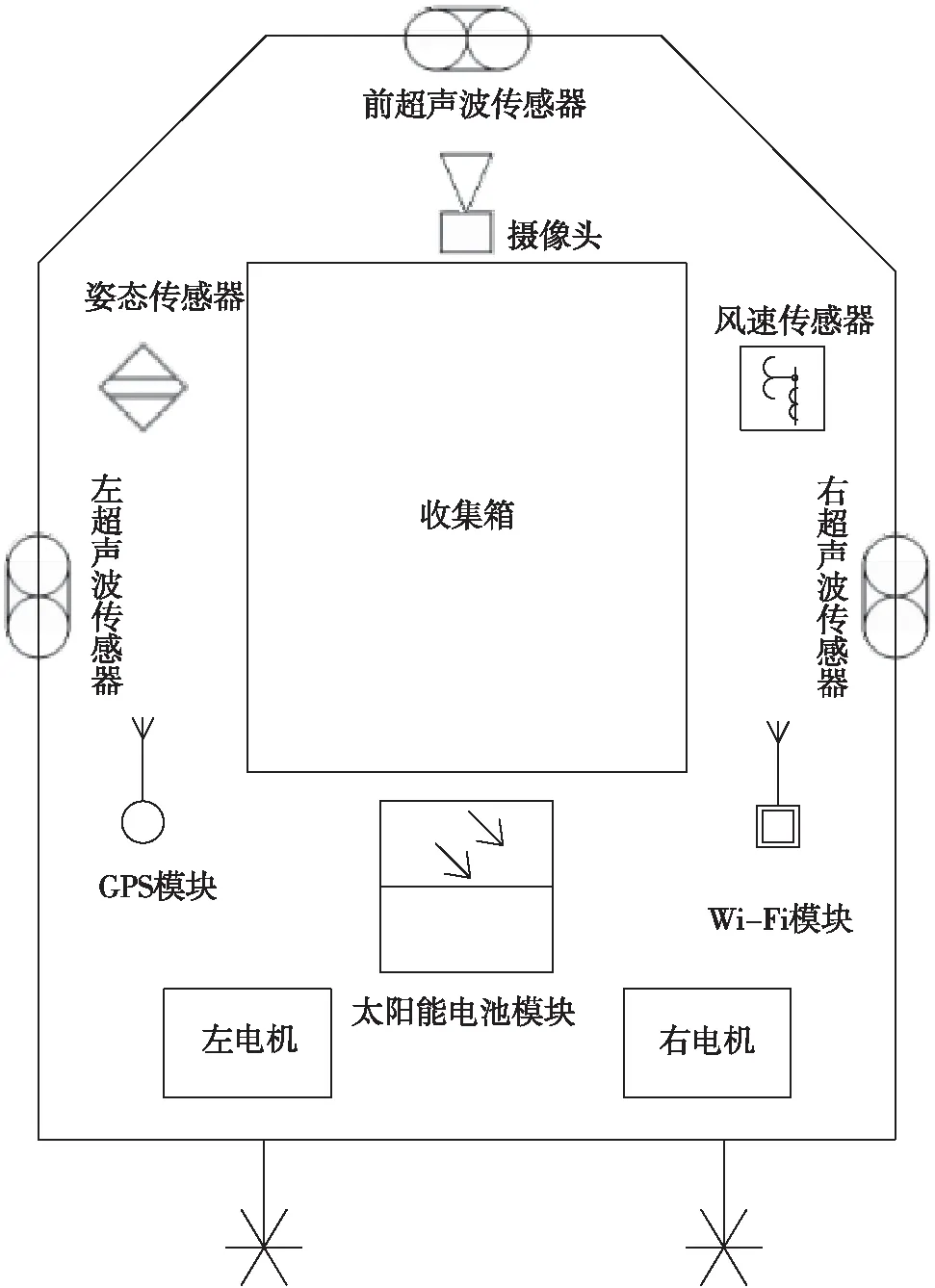
圖2 結(jié)構(gòu)設(shè)計(jì)框圖
水面垃圾清理機(jī)器人在進(jìn)行實(shí)船實(shí)驗(yàn)或者執(zhí)行相應(yīng)作業(yè)任務(wù)時(shí),通常會(huì)因風(fēng)浪流等外界因素影響而使船體產(chǎn)生橫滾、俯仰等姿態(tài)變化,因此會(huì)導(dǎo)致船載的測(cè)量平面與水平面不平行,從而給出錯(cuò)誤的障礙物檢測(cè)信息,影響機(jī)器人安全航行,為此,搭載三軸重力加速度傳感器來(lái)測(cè)量船體姿態(tài)。
水面垃圾清理機(jī)器人艙體內(nèi)設(shè)置一個(gè)可拆卸垃圾收集箱,便于人工更換裝滿(mǎn)垃圾的垃圾收集箱,減少更換時(shí)間。垃圾收集箱內(nèi)表面光潔,上邊緣為圓角,便于垃圾清理。水面垃圾清理機(jī)器人前方兩側(cè)都設(shè)置有傾斜的過(guò)濾網(wǎng),將垃圾向機(jī)器人前方中心匯聚。
機(jī)器人前方設(shè)置一個(gè)傾斜的輸送帶機(jī)構(gòu),用于將機(jī)器人前方中心匯聚的垃圾輸送至垃圾收集箱,垃圾箱滿(mǎn)傳感器可獲取箱滿(mǎn)信息。輸送帶機(jī)構(gòu)由鋁型材架、減速電機(jī)、同步帶、同步輪、上下端帶軸承的滾筒、平皮帶組成。輸送帶機(jī)構(gòu)中,充電電池驅(qū)動(dòng)減速電機(jī)旋轉(zhuǎn),減速電機(jī)通過(guò)帶傳動(dòng)的方式帶動(dòng)皮帶轉(zhuǎn)動(dòng),將垃圾輸送至垃圾收集箱。減速電機(jī)采用間斷式運(yùn)轉(zhuǎn)的方式工作,節(jié)省電能。
水面垃圾清理機(jī)器人主要依靠垃圾收集傳送電機(jī)提供動(dòng)力帶動(dòng)垃圾流入垃圾清理箱內(nèi),以達(dá)到清理垃圾的作用。垃圾流入后通過(guò)過(guò)濾網(wǎng)過(guò)濾,自動(dòng)流入垃圾收集箱,實(shí)現(xiàn)快速清理。在完成垃圾清理過(guò)程中,可對(duì)垃圾箱狀態(tài)進(jìn)行檢測(cè),通過(guò)在箱體上方艙體側(cè)面設(shè)置光電式傳感器,用于感應(yīng)垃圾收集箱是否裝滿(mǎn),可實(shí)時(shí)將該信號(hào)發(fā)送到清潔人員的操作終端。
由于水面工作機(jī)器人在水面作業(yè)時(shí),頻繁充電影響工作效率,考慮到水面一般能接收到太陽(yáng)光,因此選用太陽(yáng)能作為輔助驅(qū)動(dòng)能源。考慮到水面受力情況,選用螺旋槳推進(jìn)器,推進(jìn)器由減速電機(jī)加上槳葉組成,固定設(shè)置在機(jī)器人的下方。工作狀態(tài)下的螺旋槳推進(jìn)器位于水下,螺旋槳擊打水體產(chǎn)生推力,從而實(shí)現(xiàn)機(jī)器人船體的移動(dòng)。
3 軟件設(shè)計(jì)
水面垃圾清理機(jī)器人可通過(guò)遠(yuǎn)程遙控平臺(tái)設(shè)置工作模式,包括遠(yuǎn)程遙控工作模式和自動(dòng)巡航清理模式(見(jiàn)圖3)。遠(yuǎn)程遙控工作模式:清潔人員可遙控水面垃圾清理機(jī)器人至垃圾場(chǎng)并進(jìn)行清理。自動(dòng)巡航清理工作模式:可在沒(méi)有人工控制的情況下,通過(guò) GPS 位置傳感器模塊、姿態(tài)傳感器、前置超聲波傳感器、左置超聲波傳感器、右置超聲波傳感器和前置攝像,自動(dòng)規(guī)劃清理路線(xiàn)完成自動(dòng)巡航清理;垃圾收集箱滿(mǎn)后,水面垃圾清理機(jī)器人可自動(dòng)回到返航記錄點(diǎn),此種模式垃圾收集效率更高,大大減輕了清潔人員處理垃圾的工作量。
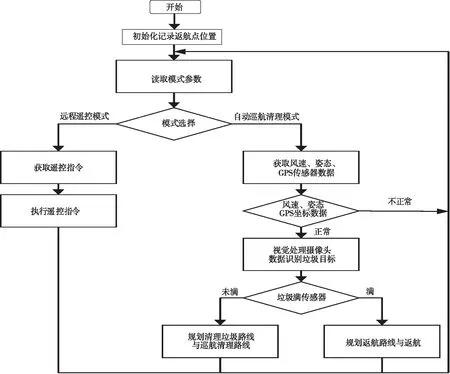
圖3 水面垃圾清理機(jī)器人工作流程圖
3.1 遠(yuǎn)程遙控工作模式
清潔人員手持遠(yuǎn)程遙控平臺(tái),通過(guò)平臺(tái)上的安卓app遠(yuǎn)程設(shè)置水面垃圾清理機(jī)器人為遠(yuǎn)程遙控工作模式,這時(shí)遠(yuǎn)程遙控平臺(tái)可接收并顯示水面垃圾清理機(jī)器人遠(yuǎn)程傳來(lái)的視頻信息和狀態(tài)信息,清潔人員可根據(jù)視頻內(nèi)容和狀態(tài)信息,發(fā)出相應(yīng)的遙控指令給水面垃圾清理機(jī)器人,水面垃圾清理機(jī)器人接收遙控指令,并根據(jù)指令內(nèi)容執(zhí)行相應(yīng)動(dòng)作。
3.2 自動(dòng)巡航清理工作模式
在自動(dòng)巡航清理工作模式下,遠(yuǎn)程遙控平臺(tái)也可獲取水面垃圾清理機(jī)器人遠(yuǎn)程傳來(lái)的視頻信息和狀態(tài)信息。當(dāng)接收到的遠(yuǎn)程信息顯示異常,表明出現(xiàn)特殊情況,清潔人員可以立即修改機(jī)器人的工作模式,解除自動(dòng)巡航模式,改為遠(yuǎn)程遙控模式。
自動(dòng)巡航清理工作模式先要判斷當(dāng)前環(huán)境是否滿(mǎn)足自動(dòng)巡航前提條件,風(fēng)速過(guò)大,水面垃圾清理機(jī)器人的姿態(tài)不正確(比如船體傾斜幅度過(guò)大),GPS位置沒(méi)在指定水域,軟件跳過(guò)自動(dòng)巡航。滿(mǎn)足自動(dòng)巡航前提條件后,視覺(jué)處理攝像頭識(shí)別垃圾目標(biāo):垃圾箱未滿(mǎn),水面垃圾清理機(jī)器人會(huì)規(guī)劃清理垃圾路線(xiàn),開(kāi)動(dòng)垃圾收集傳送帶,巡航清理垃圾;垃圾箱滿(mǎn)后,水面垃圾清理機(jī)器人會(huì)停止垃圾收集傳送帶,規(guī)劃返航路線(xiàn),并返航提醒清潔人員清倒垃圾箱。
垃圾目標(biāo)識(shí)別算法通過(guò)TensorFlow深度學(xué)習(xí)框架,用MX-YOLOv3進(jìn)行垃圾目標(biāo)識(shí)別神經(jīng)網(wǎng)絡(luò)模型訓(xùn)練,接著轉(zhuǎn)換成可被K210 硬件平臺(tái)識(shí)別的Kmodel格式的推理模型文件,然后使用Mixly圖形化開(kāi)發(fā)環(huán)境下的Python語(yǔ)言設(shè)計(jì)實(shí)現(xiàn)推理模型KPU加載和KPU圖像數(shù)據(jù)處理,最后AIstart人工智能主機(jī)結(jié)果輸出。水面垃圾識(shí)別通過(guò)圖像傳感器獲取水面圖片,然后結(jié)合垃圾識(shí)別算法,判斷是否為垃圾,由位移傳感器獲取垃圾位置信息,計(jì)算目標(biāo)垃圾所處位置坐標(biāo),并啟動(dòng)機(jī)器人駛?cè)肽繕?biāo)垃圾所在位置,實(shí)施清理。
4 結(jié)語(yǔ)
為實(shí)現(xiàn)水面漂浮垃圾的高效清理,本文基于水面垃圾清理機(jī)器人和遠(yuǎn)程遙控平臺(tái)兩部分實(shí)現(xiàn)了水面垃圾清理機(jī)器人系統(tǒng),能實(shí)現(xiàn)遠(yuǎn)程遙控模式和自動(dòng)巡航清理模式2種工作模式。針對(duì)自動(dòng)巡航模式,設(shè)計(jì)了垃圾目標(biāo)識(shí)別算法,該算法能實(shí)現(xiàn)對(duì)常見(jiàn)垃圾目標(biāo)的識(shí)別,將水面漂浮垃圾與水面景觀、漂浮植物、水岸等成功分離開(kāi)來(lái)。經(jīng)測(cè)試,本文設(shè)計(jì)的水面垃圾清理機(jī)器人,能完成人工湖等靜態(tài)水域水面漂浮垃圾的清理,具有良好的應(yīng)用和推廣價(jià)值。