小功率水電站變速恒頻控制系統研究
2022-09-24 07:22:24胡興洋韓鴻凌張隆恩葉龐琪張瀏亮
湖北電力 2022年2期
關鍵詞:發電機
胡興洋,韓鴻凌,陳 堃,張隆恩,葉龐琪,張瀏亮
(1.國網湖北省電力有限公司電力科學研究,湖北 武漢 430077;2. 國網湖北省電力有限公司中超建設管理公司,湖北 武漢 430022;3.湖北方源東力電力科學研究有限公司,湖北 武漢 430077)
0 引言
我國的電力能源仍以煤炭為主,煤炭的大規模燃燒,引發溫室氣體排放、空氣污染、酸雨等一系列環境污染問題[1]。水電是當今世界公認的可再生、綠色清潔能源[2],各項指標不僅遠遠優于傳統化石能源和核能,也遠優于風能和太陽能等各種新能源,其中小水電各項指標又優于中大型水電[3]。20世紀80年代,在國家政策的扶持下,各地方開始自主建設小水電,規劃配套電網,逐漸形成40多個區域電網,600多個縣以小水電供電為主[4]。進入新世紀后,小水電從解決山區農村無電用問題逐步轉向提高農村電氣化發展水平、加快貧困地區脫貧致富步伐、帶動山區農村經濟發展、積極保護生態環境,逐步形成了以林蓄水、以水發電、以電養林的生態循環模式,有效保護了當地森林資源不被破壞。
傳統的水力發電控制系統中,一般通過調速器來控制水輪機轉速來控制發電機三相電壓頻率,以及通過勵磁裝置調節勵磁電流,控制交流側三相電壓幅值,再通過專用的相位檢測裝置,來檢測發電機輸出電壓和電網電壓相位,進而實現同期并網發電。控制系統復雜,成本高,而且并網運行時,水輪機固定運行在額定轉速,當水流量低時,無法發揮水輪機組最大效率[5],造成水資源浪費,若強行修渠引水發電,又會破壞河流生態,甚至影響周邊生產和居民生活[6],因此提高小水電低流量下發電量成為小水電進一步發展亟待解決的問題。
針對上述問題,本文將雙PWM變流器[7-10]應用于水力發電并網控制系統中,將并網過程和發電機傳輸功率過程分離開來,兩者通過高壓直流母線連接,來實現變速恒頻水力發電[11]。控制系統分為網側系統和機側系統,網側系統控制直流母線電壓,通過鎖相環技術檢測電網相位,采用SVPWM算法,實現并網發電和無功補償功能;機側系統控制發電機轉速,跟蹤水輪機最大功率輸出,將水流沖擊產生的能量以最大效率傳遞到直流母線上,提高發電量,兩個系統彼此獨立,而又緊密聯系。仿真及實驗表明該系統能有效實現水力并網發電和無功補償,同時還具有成本低、結構簡單、維護方便等優點,適合農村、山林、濕地等環境惡劣但水資源豐富的地方發電上網。
1 系統的結構與原理
整個控制系統主要包括水輪機、永磁同步發電機、背靠背雙PWM 變流器等結構,如圖1 所示。其中,水輪機與同步發電機同軸相連,為發電機提供驅動轉矩[12],經過SVPWM 變流器將機側的三相交流電能轉化為母線直流電能,網側系統穩定直流母線電壓,再經過一個SVPWM變流器將直流電能轉化為符合入網規范的三相交流電能并入電網。
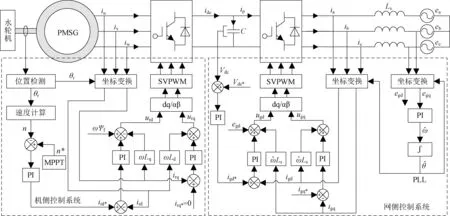
圖1 水電并網控制系統Fig.1 Hydropower grid-connected control system
系統的控制結構如圖1 所示,包括網側和機側兩個部分,其工作原理和控制過程分別如下:
網側以直流母線電壓為控制對象,采用電壓電流雙閉環的控制策略,電壓環用于控制變流器直流母線電壓,電流環用于實現有功、無功分解控制。將電壓給定值Vdc*與電壓采集值Vdc的差值傳入電壓控制器,其輸出作為電流有功分量的給定值igd*,電流無功分量給定值igq*可根據小水電入網規定設置,將電流給定值igd*、igq*與電流采集值igd、igq的差值傳入電流控制器,經過 前 饋 補 償 后 得 到 電 壓 給 定 值ugd*、ugq*,再 經 過SVPWM模塊產生驅動變流器的脈沖信號,這樣變流器輸出電流將實時跟蹤直流母線功率變化,從而實現并網發電控制。
機側以同步發電機轉速為控制對象,采用轉速電流雙閉環控制策略,轉速外環用于穩定發電機轉速,電流內環實現對水輪機輸出功率的跟蹤控制。通過水輪機最大功率跟蹤控制算法得到發電機目標轉速,再將發電機目標轉速n*與實際轉速n的差值送入轉速控制器,其輸出作為轉矩電流分量的給定值ird*,勵磁電流分量給定值irq*設為0,將電流給定值ird*與電流采集值ird、irq的差值傳入電流控制器,經過前饋補償后得到電壓給定值urd*、urq*,再經過SVPWM 調制產生驅動變流器的控制信號,這樣變流器的輸出電流將實時跟蹤水輪機功率變化,實現能量的轉化和傳遞。
系統采用SVPWM 算法實現機側和網側系統的脈沖調制,能有效提高直流電壓利用率,減小損耗,提高系統效率。
2 并網變流器控制原理
2.1 電流內環解耦控制
同步旋轉坐標系下的并網變流器電壓分量方程[13]為

式(1)中,ugd、ugq、igd、igq、egd、egq分別為變流器輸出電壓矢量us、電流矢量is以及電網電壓矢量e的dq軸分量;Ls為網側等效電感;Rs為網側等效電阻;ωe為電網角頻率。

式(2)中,kp為電流環PI 控制器比例常數;ki為積分常數。
為實現網側控制系統有功、無功分離,假定電網電壓矢量e與dq坐標系的d軸重合[15],則其dq軸分量分別滿足egd=e且egq=0。
此時,輸送到電網的有功、無功功率可分別表示為
式(3)中,P為并網的有功功率;Q為并網的無功功率。
由式(3)可知,在基于電網電壓矢量定向的同步旋轉坐標系下,igd為有功電流分量,igq為無功電流分量,從而實現并網有功、無功獨立控制。P為正,表示系統向電網輸送有功;Q為正,表示系統向電網輸送感性無功。
2.2 并網變流器功率控制原理
忽略線路上雜散電阻的壓降,以電網電壓矢量e為參考矢量,通過控制變流器輸出電流矢量is相對于參考矢量的方向,可使并網變流器運行在不同的狀態,如圖2所示,變流器工作模式如下。
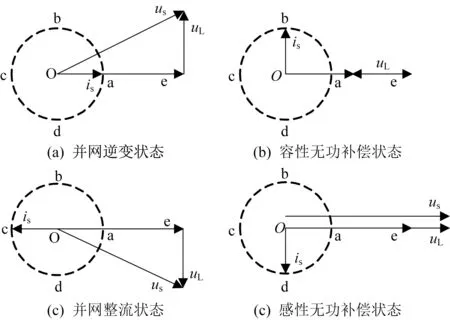
圖2 并網變流器工作模式Fig.2 Working modes of grid-connected converter
1)當電流矢量is運行在a 點時,并網電流與電網電壓相位相同,根據式(3),此時并網變流器工作于逆變狀態,電能從直流母線輸送到電網。
2)當電流矢量is運行在b 點時,并網電流超前于電網電壓,根據式(3),此時并網變流器相當于一個無功補償器,往電網傳輸容性無功電能。
3)當電流矢量is運行在c 點時,并網電流與電網電壓相位相反,根據式(3),此時變流器工作于整流狀態,電網往直流母線上釋放有功電能。
4)當電流矢量is運行在d 點時,并網電流滯后于電網電壓,根據式(3),此并網變流器相當于一個無功補償器,往電網傳輸感性無功電能。
由于小水電并網規定,系統不僅要能提供有功電能,上網時還需要提供一定的無功電能,所以在實際的控制中,一般讓變流器工作在ad 段,為電網提供所需要的感性無功,從而節省了并聯電容器的成本[16]。
3 機側變流器控制原理
3.1 同步發電機控制原理
按電動機慣例,在兩相同步旋轉坐標系下,令d軸與永磁同步發電機反電動勢矢量重合,電壓分量方程[17]為

式(4)中,urd、urq、ird、irq分別為發電機端電壓矢量、定子電流矢量的dq 軸分量;Rrs為定子電阻;e0為電機反電動勢;Ld、Lq分別為dq軸等效電感;ω為電角頻率。
在實際控制中,機側變流器采用單位功率因素控制[18],即q 軸勵磁電流分量目標值設為0,d 軸轉矩電流分量決定了能量流動的大小和方向。根據電機反電勢矢量與電流矢量的對應關系,通過控制電流方向,可使機側變流器處于逆變或整流運行狀態,規律如下:
1)電流矢量與d 軸正方向重合,即電流矢量與電機反電勢矢量同相位時,發電機往直流母線注入有功電能,機側變流器工作在整流狀態。此種狀態反映的是水流量較大時,通過控制水閥,驅動水輪機葉輪做功,往直流母線饋入電能。
2)電流矢量與d 軸正方向相反,即電流矢量與電機反電勢矢量反相位時,發電機從直流母線吸收有功電能,機側變流器工作在逆變狀態。此種狀態反映的是水流量較小時,關閉閥門,從直流母線上吸收少量有功電能維持其正常運行。
在實際控制中,為減小系統損耗,當水流量較小時,機側系統可停止運行。
3.2 水輪機最大功率跟蹤控制
在該系統中,水輪機與發電機同軸連接,能量直接從水輪機傳輸至發電機,將機械能轉化為電能。水輪機輸出功率[5]可表示為

式(5)中,W為水輪機輸出功率;γ為水的比重常數,一般取9.81;Q為水輪機的流量;H為水輪機的工作水頭;η為水輪機效率。
水輪機輸出扭矩為

式(6)中,Tm為水輪機輸出扭矩,n為水輪機轉速。
由式(5)、式(6)可知,影響水輪機輸出功率和輸出扭矩的主要因素為轉速、流量、工作水頭以及效率。考慮到水頭和效率在水輪機運行過程中,無法直接控制,且其與流量存在一定的耦合關系,所以水輪機輸出功率模型可以簡化為與流量、轉速的對應關系W=f(Q,n)。圖3為軸流式水輪機不同導葉開度和轉速下的出力曲線圖[19],W/WN為功率比,n/nN為轉速比,a為導葉開度。從圖3 中可以看出,不同導葉開度下都對應一個功率最大輸出的轉速點,額定轉速下水輪機輸出功率最大,當導葉開度減小即流量降低時,最大功率輸出對應轉速逐漸降低,若此時水輪機仍保持額定轉速運行,水輪機運行工況將逐漸偏移最佳運行區間,導致水輪機無法發揮最大效率,長期偏離最佳運行區間會加重水輪機的磨損,導致水輪機使用壽命降低。若水輪機轉速可調,當水流量或水頭發生變化時,可采用爬坡法等[20-21]調節轉速來跟蹤水輪機最大出力點,使水輪機保持最大功率輸出。

圖3 不同導葉開度下水輪機轉速與功率關系Fig.3 Relationship between turbine speed and power under different guide vane opening
4 仿真與實驗研究
4.1 仿真研究
利用Matlab/Simulink 軟件建立如圖1 所示的控制系統仿真模型,相關參數如下:并網線電壓為400 V,頻率為50 Hz,等效電感為1 mH,直流母線電壓為900 V,發電機額定轉速為1 500 r/min,極對數為2,轉子磁鏈為0.698 Wb,定子電阻為2.87×10-4Ω,dq 軸等效電感均為0.85 mH。
仿真中,網側系統將直流母線電壓穩定在900 V,機側系統發電機轉速設置為1 500 r/min,通過功率閉環往網側輸送功率。系統初始功率值設置為20 kW,0.15 s 時功率上升至60 kW,0.3 s 繼續上升至100 kW。圖4為控制系統功率響應曲線,圖5為發電機三相電流變化曲線,可以看出,當目標功率發生突變時,發電機輸出電流能快速跟蹤功率變化,將功率輸送至直流母線,并迅速趨于穩定。
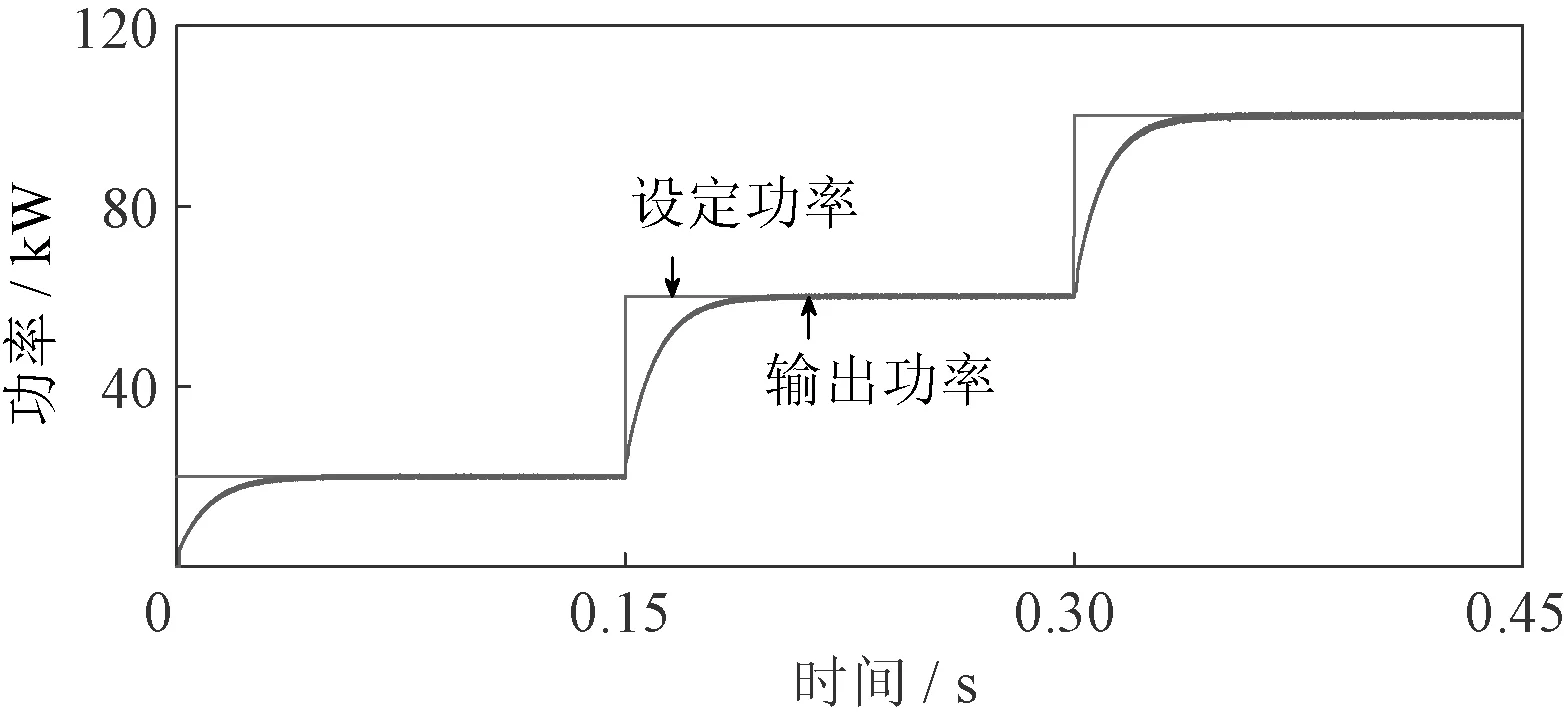
圖4 功率響應曲線Fig.4 Curve of power response
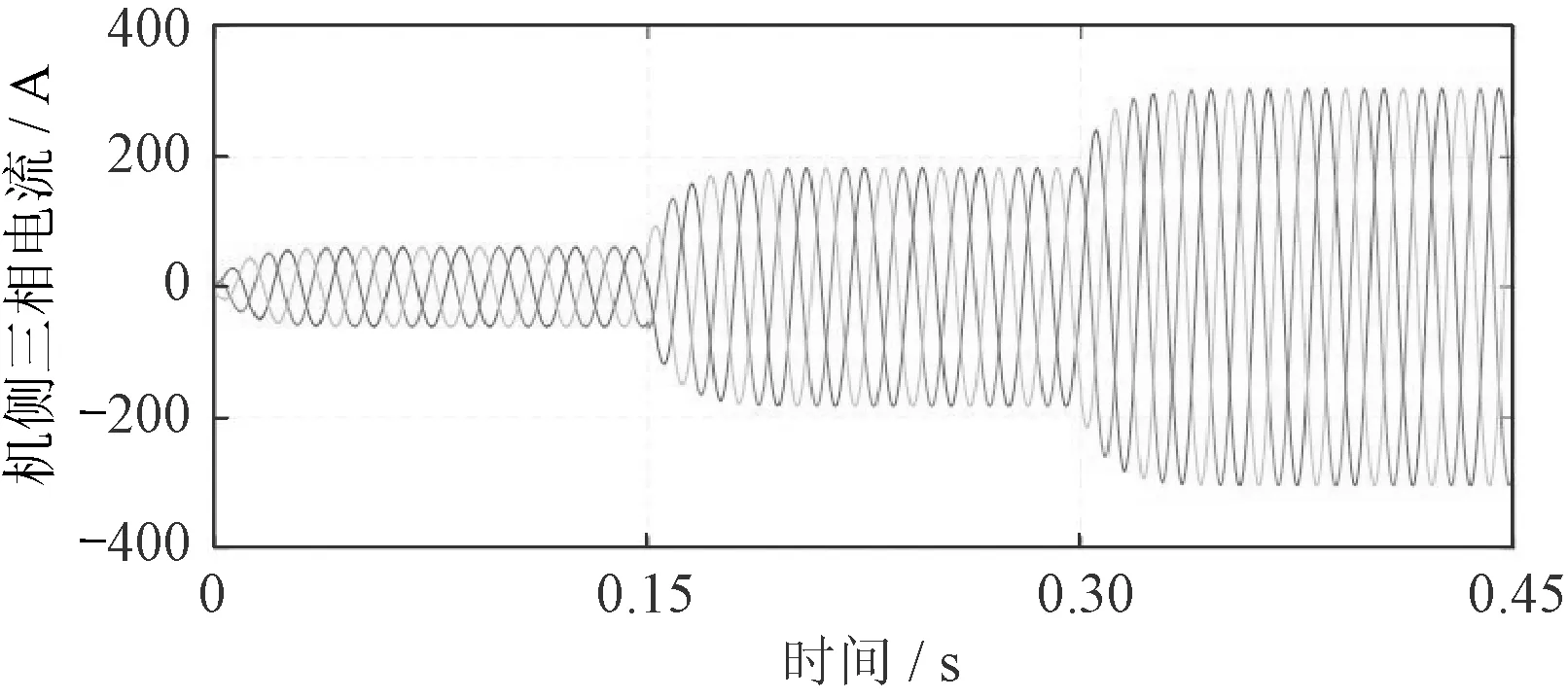
圖5 發電機三相電流Fig.5 Three-phase current of generator
當機側系統將功率輸送至直流母線,母線電壓在功率沖擊下會發生突變,但在網側系統的調節下,電壓快速趨于穩定,如圖6 所示。網側系統通過電壓外環將直流母線電壓穩定在設定值,同時電流內環快速跟蹤電壓環輸出值,將直流電能轉化為交流電能送至電網,如圖7所示。圖7為并網電壓電流變化曲線,可以看出,并網電流能快速響應功率變化,并且并網電壓、電流相位相反,表示系統往電網傳輸有功電能。
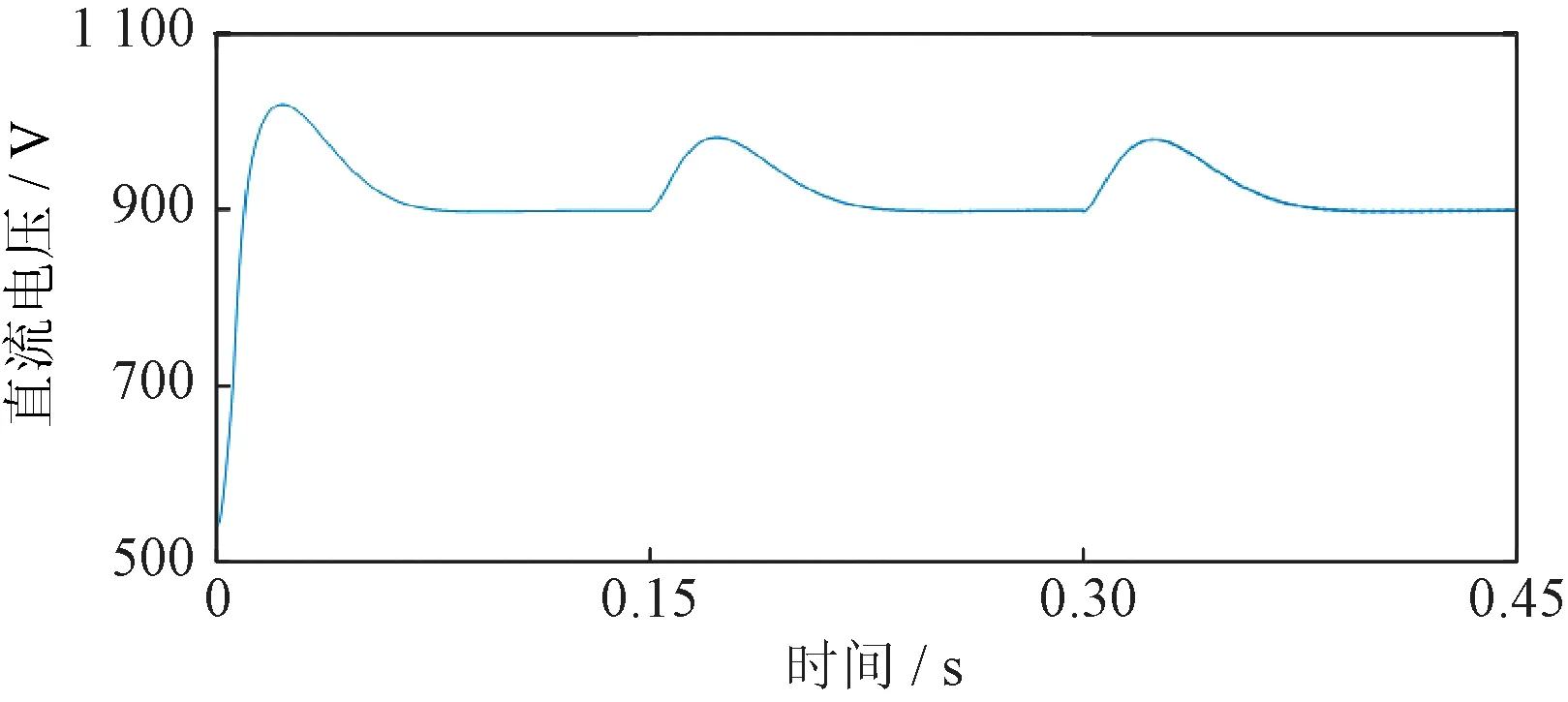
圖6 直流母線電壓Fig.6 DC bus voltage
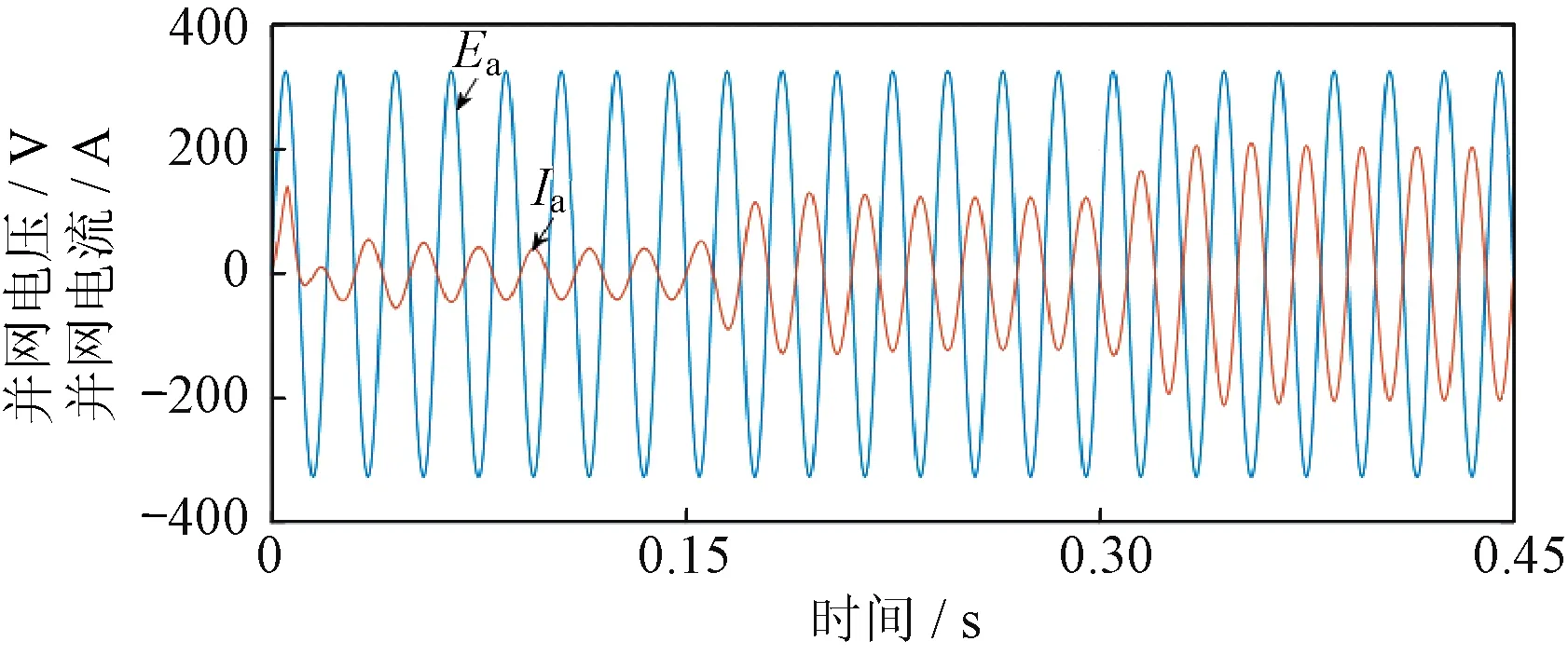
圖7 并網電壓電流Fig.7 Grid-connected voltage and current
4.2 實驗驗證
為了進一步驗證所提控制系統的有效性,對一座額定功率200 kW的小型水電站進行了系統改造,并開展了對比試驗,試驗現場如圖8。該電站原為恒速恒頻機組,最大工作水頭為1.73 m,調速器最大導葉開度為47,將原機組的電勵磁同步發電機以及勵磁控制柜替換為永磁同步發電機和雙PWM 變流器控制柜,水輪機和并網變壓器維持不變。改造完成后,水輪機與永磁同步發電機通過飛輪同軸連接,發電機三相母線接到雙PWM變流器控制柜,然后通過升壓變壓器接入電網。

圖8 試驗現場Fig.8 Testing site
改造完后,對控制系統的基本控制功能開展驗證,并網功率因素設置為0.85,系統啟動后通過最大功率跟蹤控制法自動搜尋水輪機最大功率輸出轉速。
圖9為系統穩定運行時發電機和并網電壓電流波形。可以看出,并網電壓、電流相位相反并且相差一定角度,表明此時系統正往電網輸送有功電能,并提供一定的無功電能。由圖9 可知,此時并網點相電壓為231.8 V,并網相電流為191.5 A,按功率因素0.85計算,并網有功功率為112.5 kW,無功功率為69.6 kVar。
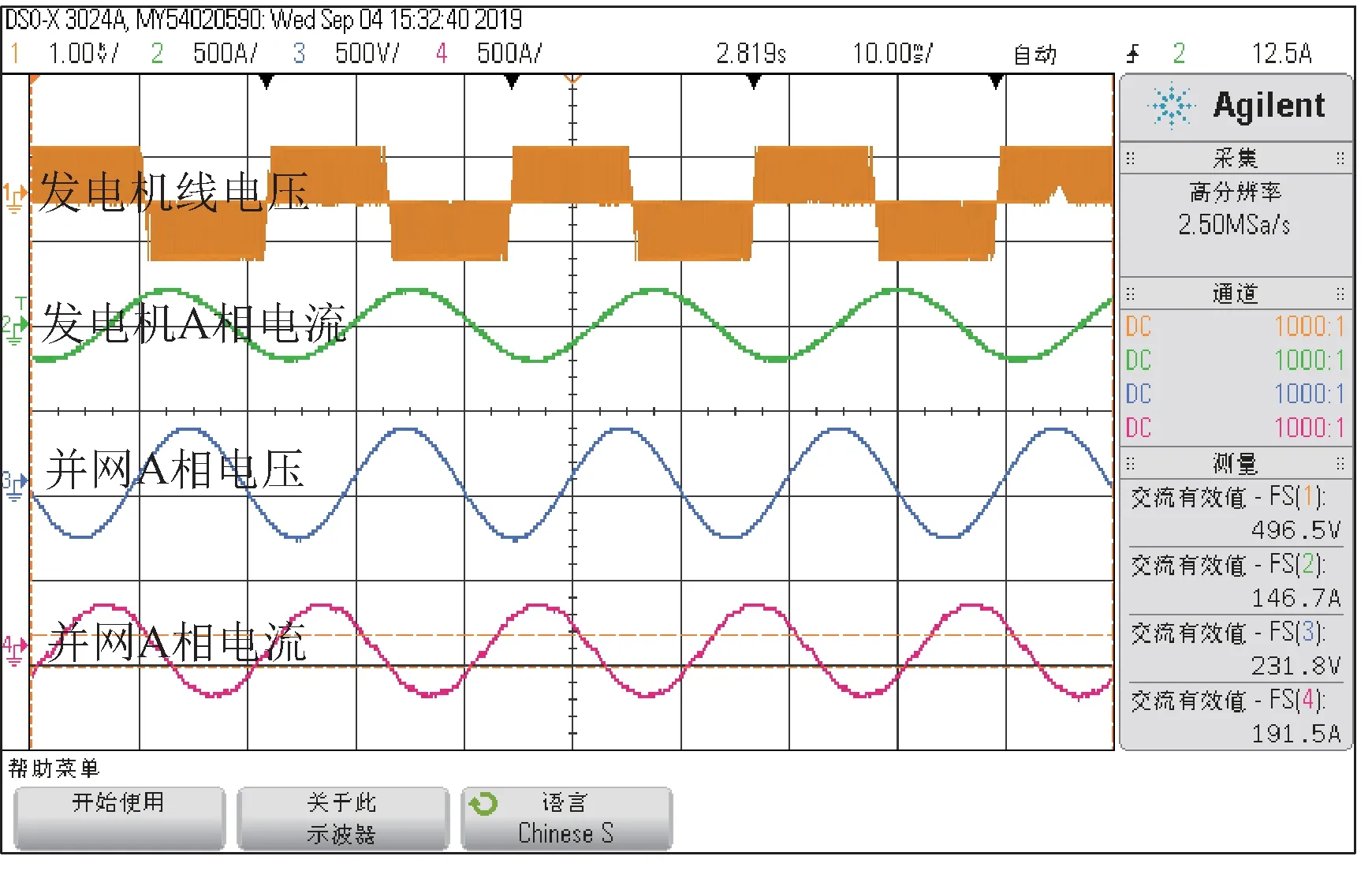
圖9 電壓電流波形Fig.9 Waveform of voltage and current
為充分驗證所提控制系統的有效性,在系統改造前后,對新舊機組不同工況下的輸出功率進行了對比測試。測試期間,水輪機工作水頭維持在最大值1.73 m,通過調速器調節導葉開度,改變水輪機流量和輸出功率。新舊機組在不同導葉開度下的輸出功率對比如表1所示。

表1 不同開度下新舊機組輸出功率對比Table 1 Comparison of output power of old and new units under different guide vane opening
由表1 所測數據可以看出,當水輪機導葉開度在53.2%及以下時,原恒速恒頻機組輸出功率波動幅度大,無法正常發電,而新變速恒頻機組則能通過降低水輪機轉速從而增強水輪機的水能捕獲能力,使系統保持良好的工作狀態,在導葉開度降低至53.2%時,新機組仍能保持32.3 kW的輸出功率。當水輪機導葉開度在63.8%~95.7%之間時,新機組的輸出功率都要大于舊機組,特別是在低開度(流量)下,相較舊機組,新機組的發電能力更加明顯,在導葉開度為63.8%時,新機組的輸出功率是舊機組的3.28倍。
上述數據表明,利用變速恒頻調速技術能顯著提升水輪機的水能捕獲能力,解決小型水電站在枯水期發電效率低的困境,有利于提升電站的年周期發電量。
5 結語
針對小水電站并網系統控制復雜、低流量下效率低等問題,本文將雙PWM變流器應用于水力發電并網系統中,其特點在于:1)采用背靠背雙向PWM變流器將發電機傳輸功率過程與并網發電過程分離,實現變速恒頻水力發電;2)網側系統與靜止無功補償器結構類似,采用SVPWM控制算法實現并網發電的同時,為電網提供所需的無功功率,實現無功補償功能;3)機側系統控制發電機轉速,實時跟蹤水輪機最優轉速點,使水輪機始終保持最大功率輸出,提高控制系統效率;4)低流量下,相較傳統水電并網控制系統,能顯著提高發電量。而且該控制系統體積小、結構簡單、控制方便,能有效降低并網發電成本,適合位置較偏但水資源豐富的地方發電上網,與傳統水電控制系統相比,損耗更小、效率更高,最后實驗驗證了該水電并網控制系統的可靠性和有效性。
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
廣西電力(2016年6期)2016-07-10 12:03:37
通信電源技術(2016年5期)2016-03-22 01:09:38
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
電測與儀表(2015年13期)2015-04-09 11:57:12
電測與儀表(2015年2期)2015-04-09 11:29:14
水電站機電技術(2014年6期)2014-09-26 12:07:48
水電站機電技術(2014年1期)2014-09-26 11:59:45
