一種具有圖像功能的電力巡檢自站立移動機器人
2022-09-24 07:22:48葉思琪羅金滿王湘女
湖北電力 2022年2期
葉思琪,劉 飄,羅金滿,余 凌,王湘女
(廣東電網有限責任公司東莞供電局,廣東 東莞 523008)
0 引言
電力系統及其附屬的大量電氣設備長時間不間斷運行過程中,通常采用定期巡檢等方式對電力系統或設備進行排查,以便及時發現有故障甚至潛在故障的電力設備。當前電力設備巡檢,多需要運維人員攜帶對應設備,到電力現場進行電氣設備的逐一巡檢,存在工作量大、效率低的問題。
針對當前人工巡檢效果過于依賴人工經驗的問題,電力領域也逐步采用移動機器人進行電氣設備的巡檢[1-4]。尤其對于地形復雜、環境惡劣、高壓危險的特種電力區域的巡檢工作,依靠人工進行巡檢存在不及時、人工投入大、效率低、危險性高等缺點,采用移動機器人巡檢有助于解決上述問題[5-8]。目前巡檢機器人最常用的移動結構多為輪式或掛軌式。輪式移動結構簡單,操作方便,但其地形適應能力較差,僅適用于較為平坦的地面,如因外部環境如地面摩擦力不足、地方陡峭或者啟動、急停時都會導致機器人失穩摔倒。掛軌式機器人巡檢有精確的定位精度和響應速度,如文獻[9]開發了一款具有云臺升降功能的掛軌式巡檢機器人,提高了海上升壓站巡檢智能化水平。但以上兩種移動結構的機器人大多存在跌倒后無法自站立或運動路徑單一的問題,本項目將研發一種具有自站立功能的巡檢機器人。
自站立功能巡檢機器人將借鑒人體行走的機理,研發一種跌倒后可自站立的機器人,解決當前電力領域機器人普遍存在的不可自站立的問題,同時輔以高清攝像頭,進行特種電力區域的運行狀況和環境拍攝,實現特種電力區域信息的記錄和檢測,同時兼具智能巡線、自動避障等功能。
1 自站立機器人原理
輪式移動機器人具有較為固定的前進方式,與地面的接觸面積大,前行穩定性較好,控制方式較為簡單,因此,在當前的電力巡檢中得到廣泛應用。但是輪式移動機器人只適用于地面平穩的電力應用場景,對于路面不平整或障礙物較多的電力巡檢應用,則受限太多無法很好完成巡檢任務[10-12]。
隨著機器人技術的發展,具有腳足的自站立機器人逐步得到了應用,尤其在地面曲折、臺階較多等復雜地理的電力巡檢,具有腳足的自站立機器人能夠完成輪式移動機器人無法完成的巡檢任務,而且具有自站立功能,能避免機器人意外摔倒時無法重新站立,從而不能繼續巡檢的弊端。
自站立機器人由物理手足、執行模塊、驅動模塊和控制模塊等主要模塊組成,如圖1 所示。物理手足是機器人的物理本體,完成機器人的肢體支撐、行走擺動以及抓持工件等特定動作,物理手足數量根據所需完成的任務來決定[13-14]。對于電力巡檢來說,巡檢機器人的物理手足數量越多,自站立機器人靈活性越好,但控制難度也更大,所需的控制要求也更高。
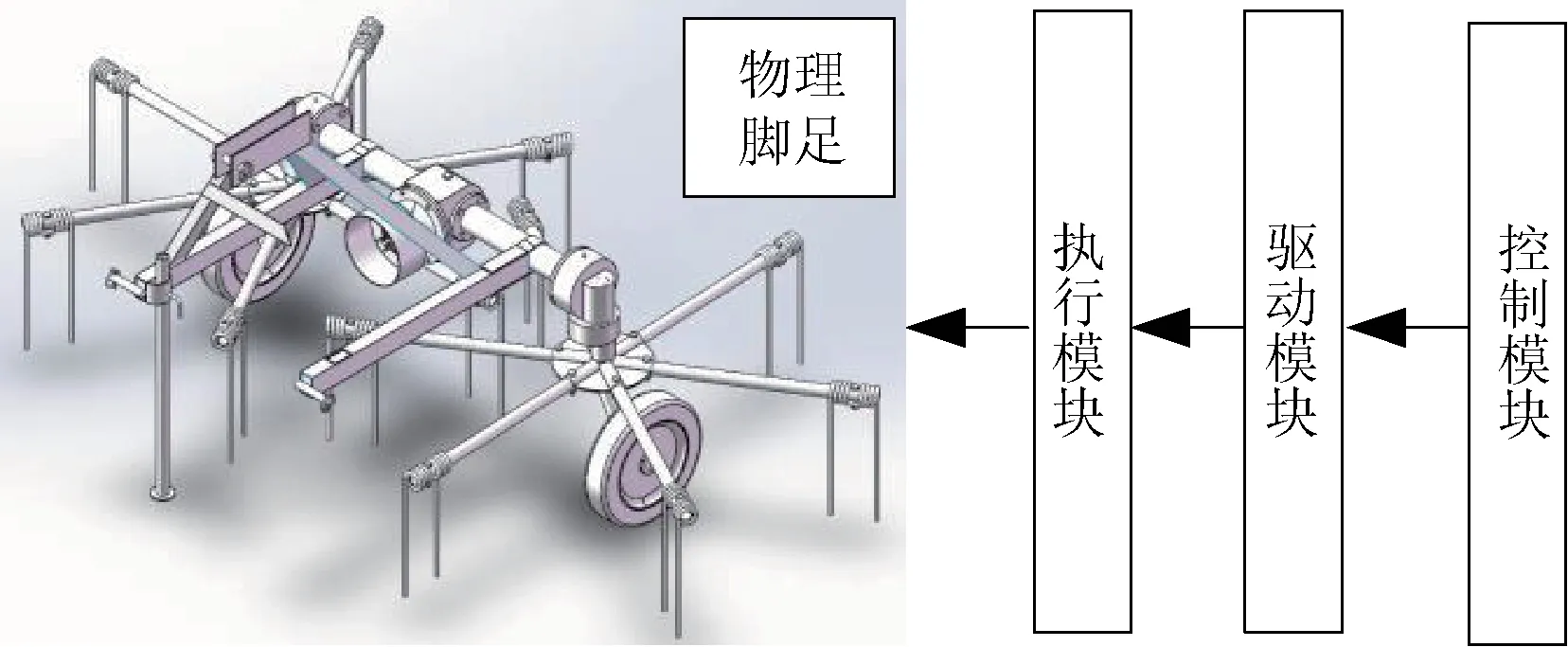
圖1 自站立機器人原理圖Fig.1 Schematic diagram of self-standing robot
執行模塊和驅動模塊是實現自站立機器人靈活控制的直接操作單元,共同協作完成自站立機器人的腳足擺動站立、傾斜、臥倒、前行甚至跨越等對應動作。自站立機器人執行模塊和驅動模塊的升降、伸縮、旋轉等獨立運動方式,稱為自站立機器人的自由度,自由度越多,自站立機器人的靈活性越大,通用性越廣,但結構也越復雜。
控制系統是自站立機器人的“大腦”,通過接收傳感器的位置、速度等信息,完成自站立機器人的方位、狀態識別并進行路徑規劃等功能,將下一步需要完成的功能,通過執行模塊和驅動模塊反饋到物理腳足,操作物理腳足執行對應動作。
2 自站立機器人信息模型
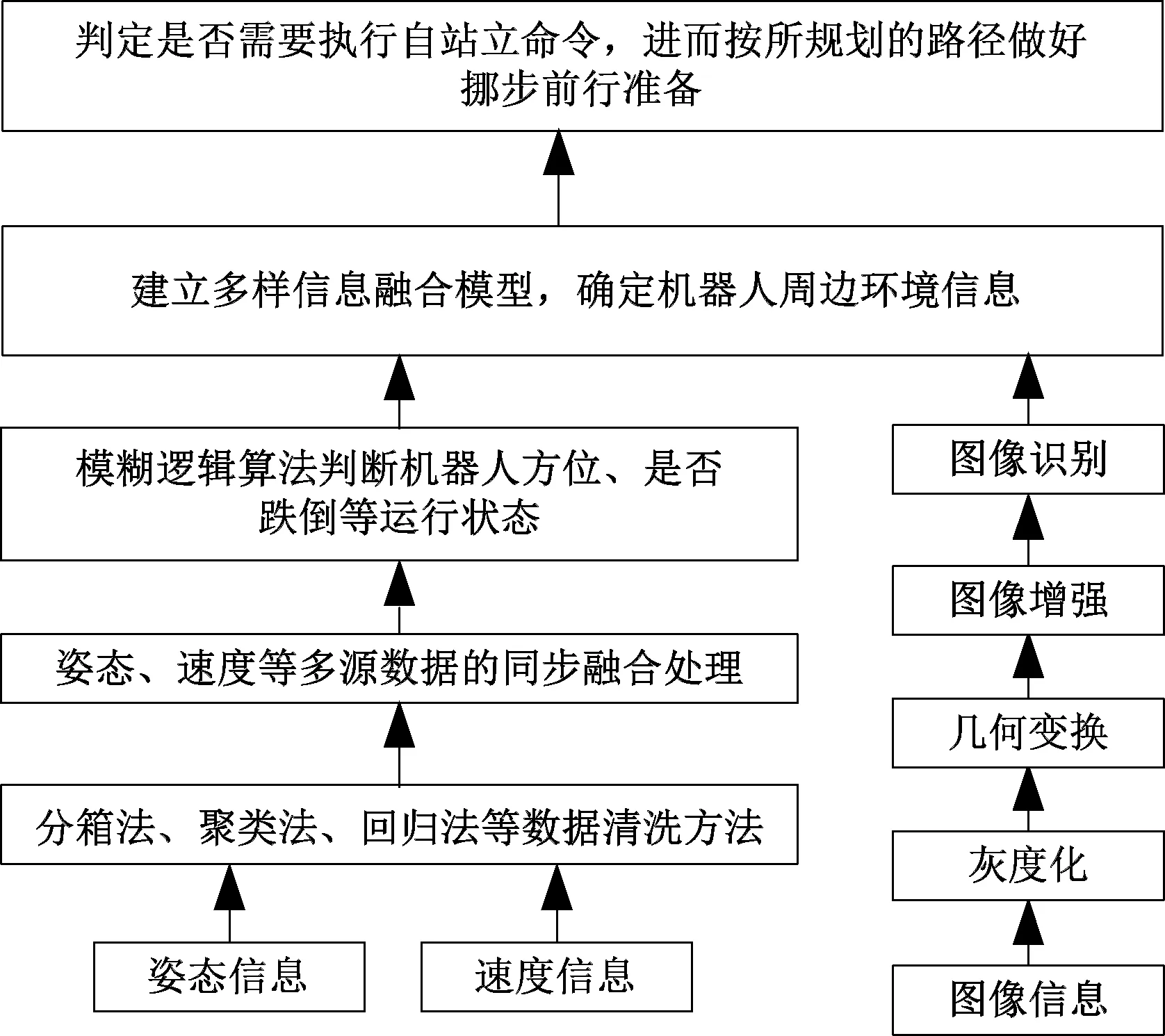
圖2 自站立機器人信息模型圖Fig.2 Information model diagram of self-standing robot
傳統的機器人信息來源,多依賴于位置傳感器、速度傳感器等純數值型的傳感數據,為了提高機器人的狀態精度,通常需要布置大量的傳感器,增加了機器人設計的成本[19-22]。另外,僅靠機器人純數值型的傳感數據,獲得機器人自身的地理位置信息,不容易獲悉周邊環境的信息,尤其無法從全局上全面了解機器人的位置以及精準掌握下一步的最優行動路徑。
因此,本文設計的自站立機器人,在傳統機器人配備的位置傳感器、速度傳感器基礎上,配備自由度高清晰廣角攝像頭,該攝像頭不僅可以實時采集機器人自身的位移信息,與位置傳感器、速度傳感器構建基于數值和圖像數據融合的自站立機器人信息模型。自站立機器人實時采集攝像頭所拍攝的圖像信息,首先進行灰度化、幾何變換、圖像增強等圖像預處理技術,提高所采集的機器人圖像信息的可用度,并基于所構建的機器人采樣數值、圖像多樣信息融合模型,不僅可以更加精準地確定機器人位置方位、是否跌倒等關鍵信息,而且還可以通過圖像獲悉障礙物等周邊環境信息,為自站立移動機器人設計能完成視覺巡線、自動避障、自主站立等功能提供有力的信息模型支撐。
3 主要硬件電路設計
自站立機器人的具體電路設計上,在遵循經典的“感知-分析運算-執行”的3 個控制邏輯基礎上,結合當前最新的半導體發展技術,在“感知-分析運算-執行”3 個環節都采用對應的先進技術,更好發揮自站立機器人的性能[23-25]。在感知環節,采用位置感知和圖像感知相結合的全域地理感知方式,避免自站立機器人陷入局部甚至不可跨越障礙物的前進路徑搜尋。在分析運算環節,由于采用了高級算法進行自站立機器人的位置分析、路徑規劃等應用,涉及的算法較為復雜、耗時較大[26-35],因此采用具有浮點計算功能的高性能數字信號控制器作為主控制器[23-25]。對于自站立機器人,涉及多個自站立機器人腳足的控制,控制環節較多,需要選用控制接口豐富的控制器。
具體表現在,首先通過位置傳感器實時采集機器人的物理位置,并通過圖像傳感器采集機器人周邊地理環境,實現機器人含周邊環境及其前進路徑規劃的全域地理信息收集。在位置地理傳感信息收集基礎上,通過位置判斷、路徑規劃等高級應用算法,自站立機器人的控制器采用具有主頻高、計算能力強的數字信號控制器,實現復雜算法的高效運行。自站立機器人腳足主要是實現PWM 控制,涉及到的PWM 接口控制多。
綜合自站立機器人的設計方案,選擇經典的控制單元F28335 作為主控制器。F28335 具有豐富的內置AD 采樣模塊,可以進行位置等傳感信息的模數轉換,形成傳感信息的數字量;F28335具有數字信號控制體系的高性能浮點計算功能,可以同時高效完成自站立機器人位置判斷、路徑規劃等復雜算法;最重要的是,F28335 控制器本身具有多個PWM 控制接口,可以方便地進行自站立機器人腳足PWM控制輸出。
自站立移動機器人以F28335控制器為核心,并由傳感器模塊、高清攝像頭、鋰電池供電及其人機界面模塊、通信模塊、PWM 信號輸出放大及電機執行電路模塊、通信模塊、機器人腳足以及鋁合金支架等主要模塊組成,如圖3所示。
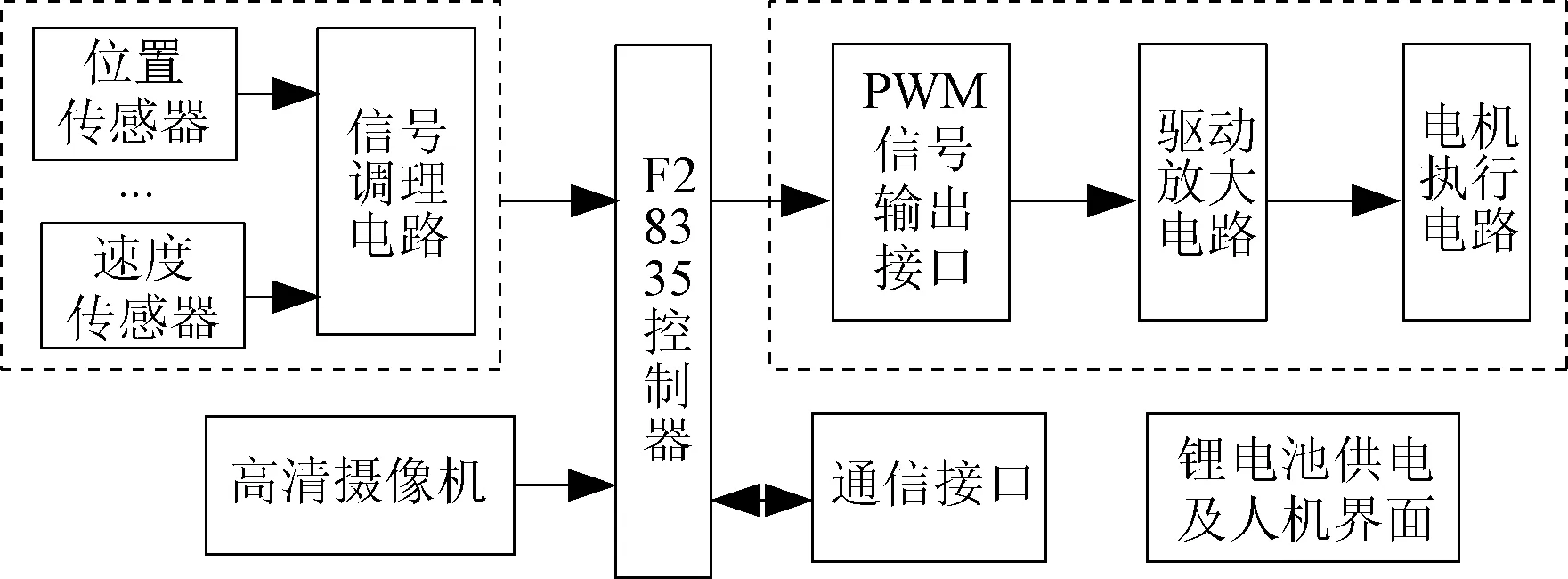
圖3 自站立機器人硬件設計Fig.3 Hardware design of self-standing robot
傳感器模塊方面,采用速度傳感器、足端傳感器等多傳感器融合及時檢測機器人步行狀態,防止機器人摔倒或在摔倒后及時做出應對措施。所配備的足端傳感器可以準確獲得腳步支撐信息,足端傳感器為可拆卸部件,如不需要可去除。
鋰電池供電及其人機界面模塊方面,機器人采用鋰電池為整機進行能量供應,并配備當前鋰電池容量顯示界面,實時提醒運行人員當前鋰電池的容量情況,防止自站立機器人工作過程中由于電量不足導致工作異常。
PWM 信號輸出放大及電機執行電路模塊,直接決定了自站立機器人的性能。本設計充分利用F28335 控制器自身配備的充足PWM 接口,只需直接將PWM 接口管腳接入驅動放大電路,并驅動電機進行自站立機器人的位移。自站立機器人轉動的角度是由調整PWM 波的脈沖寬度來決定的,其脈沖寬度與電機的轉角相對應。自站立機器人每一條腳足的關節處都有小型電機,小型電機的作用是驅動自站立機器人腳足實現轉動,驅動機器人實現肢體的前進和后退移動行走,在自站立機器人跌倒時,還具有自站立功能。
通信接口方面,自站立機器人配備多種通信方式以滿足不同電力應用巡檢要求,首先利用F28335控制器自身配備的UART 接口,方便擴充成當前電力應用現場常見的RS485通信接口。該自站立機器人進一步配備4G通信模塊,可以將自站立機器人采集到的電力巡檢信息,高效地傳遞到遠方的運維中心,減少運維人員到現場的需求。
高清攝像頭是本設計的重點之一,采用高清晰廣角攝像頭對巡檢現場進行記錄,靈活廣泛的攝像角度極大方便巡檢人員的觀測,甚至可以到達人工無法觀測的位置。自站立機器人采用改造過的海康威視的云臺攝像頭7533IW-A 進行信息采集,頭部可以上下左右轉動,搭載360°廣角高清晰度攝像頭,使得機器人的視覺識別范圍更大,攝像機支持手動調焦,使用更方便,并支持500 萬像素,兼容多系統操作windows、Linux、Openwrt,以及USB 免驅連接,能夠滿足全視覺拍攝要求。視頻采集完后,可將視頻存儲于攝像頭底盤的視頻傳儲器,也可通過無線網絡傳輸到機器人所配置的APP 上,從APP 上獲得由攝像頭所傳回的高清視頻。
4 主要軟件流程設計
自站立機器人運行過程中,根據所分配的電力運維任務,按事先規劃的原始路徑逐步前行,機器人在前行過程中,通過位置傳感器、加速傳感器等傳感單元不斷采集當前的位置和移動速度等表征機器人運行狀態的數值型信息,同步采集圖像,將圖像信息和機器人運行狀態的數值型信息融合后進行全域的機器人當前狀態判斷,其程序設計如圖4所示。

圖4 主要軟件流程設計Fig.4 Main software process design
首先判斷當前機器人是否處于跌倒狀態,如果處于跌倒狀態,則先通過控制機器人的腳足站立,恢復機器人的站立狀態,并通過傳感器和攝像機,實時采集當前機器人的位置方位信息,同時規劃機器人前行的下一步路徑。
接著判斷所規劃的路徑是否存在障礙物,如果有障礙物,則結合圖像的障礙物大小尺寸,進一步判斷機器人是否能跨越障礙物,如果不可用,則重新規劃前進路徑,并按機器人所規劃的路徑繼續前行,前行過程中不斷采集傳感信息和圖像信息,并結合兩者信息分析機器人當前狀態和規劃前行路徑。
自站立機器人軟件運行過程中,機器人軟件首先就這些軟件開始自檢和初始化,然后按照電力巡檢任務進行路徑規劃,并按規定的路徑進行PWM輸出控制機器人的腳足電機操作。機器人前行過程中,通過位置傳感器、速度傳感器等傳感器和攝像機進行機器人位置狀態及其周邊環境的信息采集,并基于所采集的數據,進行機器人位置方位、是否跌倒、周邊障礙物等機器人的狀態識別,同時不斷進行下一步路徑規劃和操作。
自站立機器人軟件運行過程中,不斷通過人機界面面板的運行燈提示當前機器人的運行狀態,而且可以通過RS485 以及4G 通信口將所獲得的運行數據和巡檢信息發送給運行人員。
5 現場應用
所研制的自站立機器人,具有四條腳足,具有較好的適應不平整路面及障礙物較多的電力運行場景,該機器人已應用于電力評測機房巡檢,代替了人工巡檢,節省了運維成本,并對驗證機器人巡檢路線導航規劃、動態避障和自主定位、自站立功能和圖像傳輸功能進行驗證。巡檢路線規劃和現場實物如圖5 所示,在現場測試應用中,機器人按所設定的巡檢路線進行巡檢,并設定在規定點進行定位拍攝,在遇到障礙物時,可自動避開并繞行障礙物步行至規定點,實驗表明,機器人能夠按所設定路線進行,并在指定點完成規定動作。

圖5 機器人實驗路線圖Fig.5 Course map of robot test
工作人員在利用APP監測機器人的運動路徑和所傳輸回來的定位拍攝圖像,并通過相關指令觀察執行是否正確和控制機器人攝像頭轉向,通過監測可得,視頻觀看度清晰流暢,控制指令發送正確且機器人執行指令正確,且通信流暢。
將機器人放倒,改變了傳統輪式移動機器不能翻身、只能空轉,無法繼續按規劃路徑前進和完成巡檢任務的缺陷,自站立機器人跌倒后,依靠腳足可以很快站立,并繼續前行完成既定的巡檢任務。
6 結語
電力運維涉及面廣、設備多,傳統的人工運維工作量大、效率低,隨著機器人技術發展,現在逐步采用輪式移動機器人代替人工巡檢,但輪式移動機器人難以適應地面不平整、環境復雜的情況,因此,本文研發了一種具有自站立移動機器人,該機器人在配備經典的傳感器基礎上,裝載高清攝像頭實現機器人位置和周邊環境的全域數據采集,實現更準確的機器人控制。基于自站立移動機器人的特種電力區域巡檢,通過自動巡檢方式,實現特種電力區域運行狀態的監測,有助于減少人工巡檢、提高巡檢效率。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
制造技術與機床(2017年3期)2017-06-23 08:11:21
中華手工(2017年2期)2017-06-06 23:00:31
智能系統學報(2015年4期)2015-12-27 09:38:35
中外會展(2014年4期)2014-11-27 07:46:46
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
