基于國產(chǎn)三代微光ICCD探測器的三維激光成像雷達(dá)
2022-09-25 02:42:04王濱川鄭煥東
激光與紅外 2022年9期
王濱川,鄭煥東,石 峰
(1.北京動力機(jī)械研究所,北京 100074;2.天津津航技術(shù)物理研究所,天津300308;3.微光夜視技術(shù)重點實驗室,陜西 西安 710065;4.昆明物理研究所,云南 昆明 650223)
1 引 言
隨著光電技術(shù)的發(fā)展,二維平面光電成像技術(shù)日趨成熟,大視場、高分辨、高幀頻、多/高光譜等各具特色的成像產(chǎn)品已在軍事偵察和民用安防、監(jiān)控、測繪等領(lǐng)域取得了廣泛應(yīng)用,極大滿足了市場需求。二維平面成像技術(shù)的蓬勃發(fā)展,使得人們發(fā)現(xiàn)從空間到平面映射這一信息降維獲取方式存在諸多弊端,還原空間三維成像信息的需求日趨強烈。激光雷達(dá)技術(shù)體制天然具有測距的優(yōu)勢,配合掃描技術(shù)或者高規(guī)格探測器,可形成三維成像能力[1]。三維激光成像雷達(dá)(以下簡稱激光雷達(dá))近二十年來在科研、民用及軍用領(lǐng)域獲得了廣泛關(guān)注[2-4]。
掃描式激光雷達(dá)[5-6]通過機(jī)械掃描或非機(jī)械掃描的方法提高目標(biāo)的二維平面分辨率,結(jié)合每一點的測距信息,形成目標(biāo)的三維空間全貌。掃描式激光雷達(dá)對激光器的發(fā)射頻率要求高、對掃描機(jī)構(gòu)的線性度與重復(fù)精度要求高,掃描圖像易出現(xiàn)失真[7-8]。
無掃描激光雷達(dá)[9]以高規(guī)格面陣探測器為核心,單幀成像便可獲取垂直于視線的平面二維信息,結(jié)合直接/間接測距技術(shù),單幀成像即可獲取目標(biāo)的三維信息。與掃描方式相比,無掃描激光雷達(dá)具有成像固態(tài)化、無掃描失真、實時性好與幀頻高的優(yōu)點[10],同成像規(guī)模條件下體積重量小,無運動部件可靠性高。缺點是隨著探測器陣列規(guī)模增加,對光源的能量要求成幾何級數(shù)增加,目標(biāo)反射率差異過大容易導(dǎo)致低反射率區(qū)域信噪比不足、高反射率區(qū)域飽和問題,進(jìn)而影響測距精度。
核心探測器方面,國外已突破了256×256像元的LM-APDs和GM-APDs[9],而國內(nèi)研制起步較晚,尚未形成高規(guī)格APD面陣探測器。綜合考慮到三維成像高分辨率的需求和系統(tǒng)體積、重量、成本限制,采用基于國產(chǎn)三代微光像增強器的單ICCD相機(jī)與像增強器增益調(diào)制技術(shù)路線[11-12]進(jìn)行工程樣機(jī)研制。本文針對增益調(diào)制型三維快速成像激光雷達(dá)工程樣機(jī)研制的關(guān)鍵問題進(jìn)行研究。
2 增益調(diào)制三維成像原理
2.1 增益調(diào)制測距原理
三維快速成像技術(shù)的核心為面陣探測器的像元測距方法,增益調(diào)制測距基本原理如圖1所示,對三維目標(biāo)實體發(fā)射激光窄脈沖能量,利用經(jīng)過增益調(diào)制探測器所接收的圖像像元信息,與未進(jìn)行增益調(diào)制探測器所接收的圖像像元信息進(jìn)行對比,即可獲取對應(yīng)像元的距離信息。對整幀圖像數(shù)據(jù)進(jìn)行快速處理,獲得每一個像元的測距信息,即可獲取整幅圖像中目標(biāo)的三維信息。
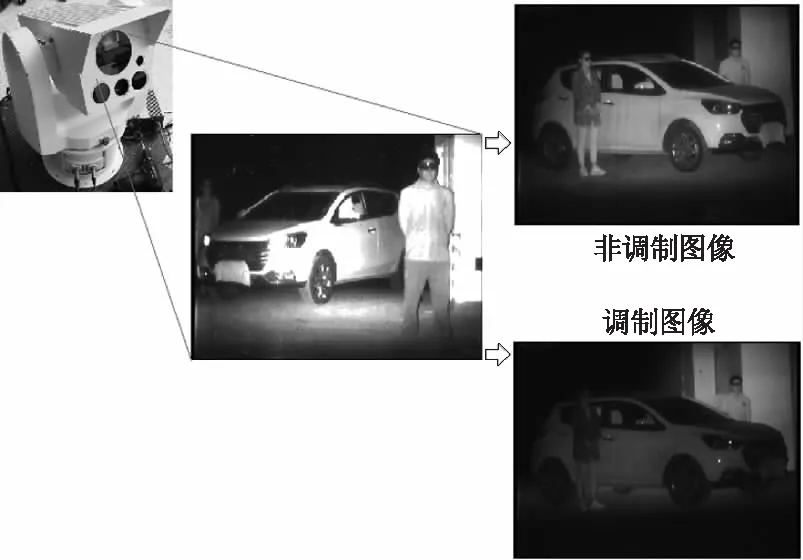
圖1 增益調(diào)制三維成像原理圖
當(dāng)配置兩個探測器時,一個探測器工作于增益調(diào)制狀態(tài)、另一個探測器工作于非調(diào)制狀態(tài),則發(fā)射一次激光窄脈沖能量既可獲得目標(biāo)的一幀三維圖像;當(dāng)配置單個探測器時,則需發(fā)射兩次激光窄脈沖能量,探測器一次工作于調(diào)制狀態(tài)、另一次工作于非調(diào)制狀態(tài),前后兩幀圖像進(jìn)行處理,即可獲取目標(biāo)的一幀三維圖像信息。
2.2 激光發(fā)射功率與成像距離
凝視焦平面激光成像測距示意如圖2所示,假設(shè)激光發(fā)射圓形光斑,能量均勻分布,激光發(fā)射光軸與接收光軸平行,位置貼近。激光發(fā)射束散角與接收對角線視場角為θ,則距離為R的物體,輻射照度為:
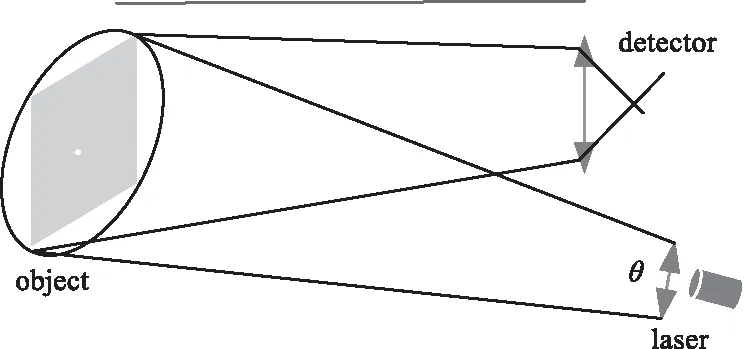
圖2 凝視焦平面測距方程示意圖
(1)
其中,Ps為激光發(fā)射功率;ηt為發(fā)射光學(xué)系統(tǒng)透過率;τa為大氣透過率。設(shè)目標(biāo)為反射率為ρ的朗伯體,則其面輻射強度為:
(2)
為方便分析,假設(shè)探測器焦平面為正方形,探測器規(guī)格M×M,其接收立體角為θ2/2,對于擴(kuò)展源目標(biāo),接收探測器視場光學(xué)前端輻射照度為:
(3)
單個像元對應(yīng)探測器前端輻射照度為:
(4)
設(shè)ICCD像增強器增益為A,則探測器單個像元接收到的功率為:
(5)
可見探測器單位像元接收到的目標(biāo)反射激光功率與增益A、激光發(fā)射功率、光學(xué)接收孔徑面積成正比,與探測器像元數(shù)M2、目標(biāo)距離的平方成反比,與視場角大小無關(guān)。為實現(xiàn)遠(yuǎn)距離探測,需增加激光發(fā)射功率、增加光學(xué)接收孔徑或者提高ICCD像增強器增益。
面陣探測器三維成像對激光器脈沖功率要求較高,對于512×512規(guī)格探測器,對激光能量要求是點源掃描探測的26萬倍。而高幀頻視頻序列三維成像,對激光器連續(xù)工作能量輸出的能力提出更高需求。
2.3 測距方程


圖3 理想情況下的圖像增益時序示意圖
(6)
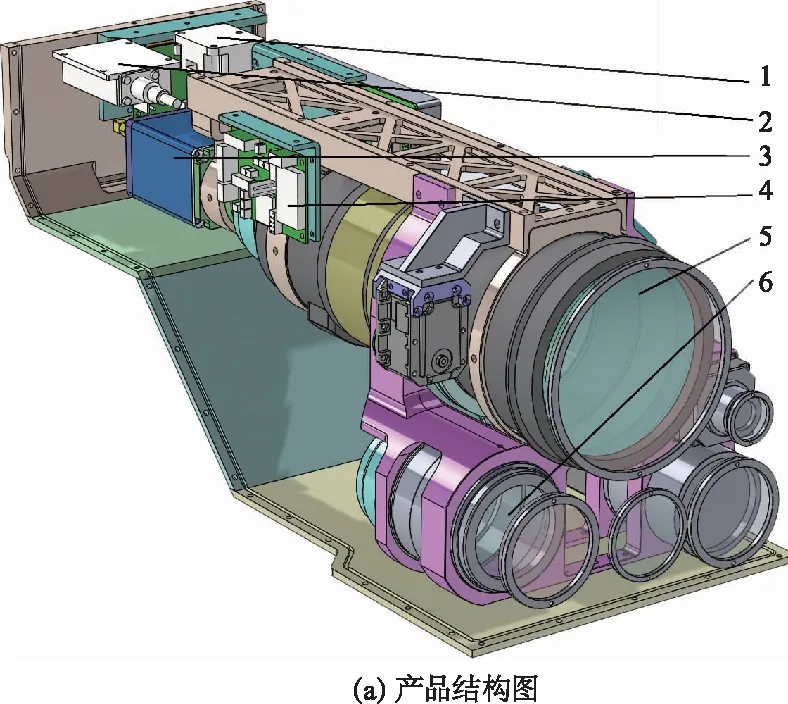
其中,斜率k為常數(shù),(tj-t1/2) (7) 理想情況下CCD中每一個像元的耦合電量與接收到的光子數(shù)成正比,即與像增強器放大后的能量成正比,則該像元的能量,用圖像灰度采樣值計算可表為: (8) 其中,K為傳感器灰度轉(zhuǎn)換系數(shù)。 在理想情況下激光光源發(fā)射特性相同、短時間內(nèi)大氣傳輸特性相同,則對任意一個像元來說Eopts是恒定值。 因此由式(8)可知對于一個特定的像元,在恒定增益非調(diào)制成像時灰度值為: (9) 同理由式(8)可知,線性增益調(diào)制成像時像元灰度值為: (10) (9)、(10)兩式相除得: (11) 由式(11)可求出: (12) t為像元接收到激光脈沖能量的時刻,因此該像元與目標(biāo)的距離為: (13) 目標(biāo)與視軸之間的夾角φ可以由光學(xué)系統(tǒng)參數(shù)、探測器參數(shù)計算獲得,于是,該物體與系統(tǒng)之間的垂直距離為: H=Rcosφ (14) 實際中,脈沖激光器每次發(fā)射存在不穩(wěn)定性、ICCD放大接收存在噪聲,物體運動也會導(dǎo)致能量反射差異,傳輸路徑變化會引起回波差異,電路時序控制會形成直接解算誤差,以上均會形成測距誤差,影響三維成像效果,本文對激光發(fā)射的差異進(jìn)行分析研究。 假設(shè)發(fā)射激光脈寬穩(wěn)定不變,功率存在誤差,即式(8)中的i值存在誤差,設(shè)相對誤差為Δ,Δ是小量。即調(diào)制狀態(tài)的增強前功率為i(1+Δ),代入式(9)和式(10)中: (15) (16) 可得: (17) (18) 對1/(1+Δ)進(jìn)行一階泰勒展開可得: (19) 設(shè)發(fā)射激光脈沖功率相同,但脈寬不同,相對誤差為δ,即調(diào)制狀態(tài)的時激光發(fā)射脈寬為t0(1+δ)。同上可求出: (20) (1+δ)2] (21) (22) (23) 對1/(1+δ)進(jìn)行一階泰勒展開: (24) 考察同能量激光脈沖發(fā)射情況下的測距誤差,即激光脈沖功率和脈寬之積為恒定,設(shè)調(diào)制狀態(tài)的時激光脈沖功率為i(1+σ)、發(fā)射脈寬為t0/(1+σ)。有: (25) N2=KEopts(1+σ)t0· (26) (27) (28) 對1/(1+σ)進(jìn)行一階泰勒展開可得: (29) 根據(jù)以上分析,為保證一定的成像距離和測距精度,需要采取以下措施:①選用光纖耦合輸出的高功率窄脈沖半導(dǎo)體激光光源;②選用具備脈寬穩(wěn)定性高、功率穩(wěn)定性好的激光器;③激光脈沖重頻超過200 kHz,多脈沖回波以相同相位在ICCD焦平面做累計曝光;④選用合理規(guī)格的ICCD探測器,不宜盲目擴(kuò)大面陣探測器規(guī)模;⑤系統(tǒng)允許情況下,盡可能增加接收光學(xué)系統(tǒng)口徑,獲取更多能量;⑥實際物體反射率差異較大時可通過空間濾波、時域濾波以及動態(tài)曝光等方式解決。 某車載無掃描激光成像雷達(dá)硬件如圖4所示,主要有由六部分組成: (a)產(chǎn)品結(jié)構(gòu)圖 (1)車載穩(wěn)臺用陀螺; (2)脈沖光纖激光器; (3)激光器驅(qū)動板; (4)增益調(diào)制三代ICCD; (5)變焦物鏡; (6)激光擴(kuò)束鏡。 系統(tǒng)工作時由外部控制器發(fā)送命令給激光器驅(qū)動板,驅(qū)動窄脈沖光纖激光器輸出激光脈沖,與此同時發(fā)送命令給增益調(diào)制三代ICCD相機(jī),控制其打開快門的時間,并完成增益調(diào)制曝光,輸出數(shù)字圖像至外部視頻采集與圖像處理模塊,進(jìn)行視頻顯示與存儲。 外場試驗如圖6所示,圖像分辨率720×576,幀頻25 Hz,與目標(biāo)距離220 m,成像距離分辨率0.005 m,測距精度優(yōu)于0.01 m。增益調(diào)制圖像如圖6(a)所示,非增益調(diào)制圖像如圖6(b)所示,三維重建偽彩色圖像如圖6(c)所示。試驗成功驗證了本文分析和措施的有效性。 圖5 外場試驗圖 本文建立了面陣激光三維成像激光發(fā)射功率與成像距離的數(shù)學(xué)模型,并依據(jù)增益調(diào)制三維激光成像原理,得出測距方程。進(jìn)一步對激光發(fā)射系統(tǒng)的脈寬和功率誤差進(jìn)行了詳細(xì)分析,得出遠(yuǎn)距離高精度三維成像的解決措施。根據(jù)分析結(jié)果指導(dǎo)單ICCD接收工程樣機(jī)設(shè)計,由外場試驗可知,在220 m遠(yuǎn)處獲得了清晰的三維視頻圖像,距離精度優(yōu)于0.01 m。 未來可進(jìn)一步提高探測距離,并結(jié)合高技術(shù)成熟度的掃描技術(shù),形成廣域偵察激光成像雷達(dá)。

3 測距誤差分析
3.1 功率誤差
3.2 脈寬誤差
3.3 同能量測距誤差
3.4 遠(yuǎn)距離高精度三維成像的措施
4 系統(tǒng)硬件組成與試驗驗證
4.1 系統(tǒng)軟硬件設(shè)計
4.2 外場試驗

5 結(jié) 論
