一種智能存取鞋柜的結構設計
2022-09-28 09:26:18湯俊杰陳建岑張文長梁鴻杰汪朋飛
機械 2022年8期
湯俊杰,陳建岑,張文長,梁鴻杰,汪朋飛
一種智能存取鞋柜的結構設計
湯俊杰,陳建岑,張文長,梁鴻杰,汪朋飛*
(深圳大學 機電與控制工程學院,廣東 深圳 518060)
針對傳統家用鞋柜老年用戶彎腰脫鞋容易受傷、人工擺放雜亂無章等問題,設計了一款智能存取鞋柜,在避免用戶彎腰脫鞋基礎之上實現鞋子的自動化存取。根據輔助脫鞋及自動存取等需求,設計了輔助脫鞋機構、夾持機構、轉盤儲存系統等結構,并構建了相應的物聯網控制系統。利用SolidWorks軟件進行三維建模及運動仿真,樣機實際測試結果表明其能夠高效率實現輔助脫鞋和自動存取功能。該智能鞋柜能夠解放雙手存儲鞋子,滿足多種家居場景需求,具備廣闊的市場前景。
智能鞋柜;自動存取;脫鞋機構;夾持機構
鞋柜作為一種日常生活中廣泛使用的家具,主要用于存儲鞋子、改善室內衛生和裝飾家居環境。迄今為止,傳統鞋柜的發展可以分為四個階段,第一階段為鞋子亂扔亂放,尚未形成鞋柜概念;第二階段為用簡易木架或鐵管組裝的開放式鞋架;第三階段為木鞋柜階段,采用美觀精致的材料搭建的封閉式鞋柜;第四階段為在原有封閉式鞋柜的基礎上加裝殺菌消毒、防潮通風等功能的智能鞋柜[1-2]。
當前,智能家居市場中常見的電子消毒鞋柜多為傳統鞋柜中加裝殺菌紫外燈和烘干裝置[3-6],其工作原理是鞋柜內部裝有臭氧發生器和低溫電熱元件以及微電腦控制系統,通過電腦控制,使鞋柜內產生符合濃度的臭氧,從而實現鞋子的除臭和殺菌防霉護理。此外,通過增加清洗裝置可實現洗鞋功能[7],或使用物聯網實現手機APP遠程查看鞋柜狀態[8],但關于鞋的自動存取功能開發報道較少[9-10]。
本研究致力于開發一種可自動存取的家用鞋柜,以220 V家用交流電為輸入電源,具備存鞋和取鞋兩種工作模式。在輔助用戶脫鞋后通過輸送機構實現鞋子的自動存放,而在手機端軟件操作選好儲存的鞋子后可將其自動取出。該智能鞋柜滿足多種家居場景需求,具備廣闊的市場前景。
1 設計思路及難點
1.1 設計思路
普通用戶脫鞋后,鞋子容易隨意擺放,收集過程繁瑣,需要設計輔助脫鞋機構避免用戶彎腰脫鞋,同時解決地面上鞋子收集的難題;為實現鞋子在鞋柜內部的運送,需要專門的運鞋機構;由于鞋子大小不一及使用平板運送鞋子導致空間浪費,夾持鞋子的機構尤為關鍵。
1.2 設計難點
(1)輔助脫鞋機構的設計。由于大部分鞋面是易變形柔軟材料,實現輔助脫鞋的機構需用自適應機械裝置以提供足夠的摩擦力使鞋子脫離用戶的腳部而又不損傷鞋面。
(2)鞋子夾持機構的設計。不同碼數鞋子外部尺寸區別大,從外部對鞋子進行夾持需要適配多個參數,易導致鞋子變形損壞。因此,考慮使用變形機構從內部夾持鞋子。
2 整體結構設計
圖1所示為自動存取鞋柜的整體結構示意圖,主要由輔助脫鞋機構、絲杠系統、鞋子夾持機構、轉盤驅動系統、轉盤儲存裝置等5部分組成。

1.鞋子夾持機構;2.絲杠系統;3.輔助脫鞋機構;4.轉盤驅動系統;5.轉盤儲存裝置。
2.1 輔助脫鞋機構設計
如圖2所示,輔助脫鞋機構主要包括孔板和彈簧桿陣列。輔助脫鞋機構可以在用戶站立狀態下輔助脫下鞋子。一般情況下,人工脫鞋需扶住鞋子后跟并施加一定的力予以固定,同時腳后跟從鞋子內部脫出。鞋子后跟形狀多為不規則曲面,因此在輔助脫鞋機構中設置彈簧桿陣列以自適應貼合鞋后跟面。用戶脫鞋時往后施加適當作用力,彈簧桿陣列與孔板間安裝的壓縮彈簧在受到壓縮時貼合鞋子的背面和底部,并提供合適的摩擦力,輔助用戶脫鞋。

1.鞋子;2.彈簧桿陣列;3.孔板。
2.2 夾持機構設計
圖3所示為鞋子夾持機構整體結構和工作示意圖。如圖3(a)所示,夾持機構主要由心型槽、限位桿、導向桿、多級連桿、拉伸彈簧和對接圓臺等組成。多級連桿機構初始處于縮回狀態,如圖3(b)所示,外部施加垂直方向的壓力,限位桿在心型槽內滑動至凹槽位置,拉伸彈簧被拉長,多級連桿可在鞋子內部伸展以夾持鞋子,如圖3(c)、(d)所示,之后在絲杠系統驅動下,夾持鞋子并在豎直方向移動。
2.3 傳動系統設計
(1)同步帶傳動系統。采用同步帶實現輔助脫鞋機構的平穩推入和推出,在輔助脫鞋機構底板下方安裝定向輪以減少與地面的摩擦。圖4所示為同步帶傳動系統與輔助脫鞋機構的結構圖,同步帶傳動系統由電機、同步帶、滑塊、同步帶輪、導軌、軸和壓板等組成。電機通過聯軸器驅動同步帶輪轉動,同步帶輪與同步帶嚙合,在同步帶與輔助脫鞋機構間設置有壓板,將同步帶的一段固定在輔助脫鞋機構的底板。
(2)轉盤驅動系統。如圖5所示,轉盤驅動系統主要包括轉盤、儲存盤、電磁制動器、主軸和舵機。在每層鞋子儲存區域中設置有兩個轉盤,呈水平相鄰120°布置。工作時,指定層的電磁制動器抱合主軸,主軸帶動其一起轉動,實現鞋的自動存取。

圖3 鞋子夾持機構
2.4 整體功能實現
圖6所示為存鞋的工作流程,先推出輔助脫鞋機構,脫鞋后輔助脫鞋機構進入鞋柜內部。絲杠帶動夾持機構下降實現對鞋子的夾持。夾持機構上升至對應的轉盤層,舵機帶動儲存盤旋轉至鞋子正下方,夾持機構下降,鞋子被夾持機構釋放后處于儲存盤上方,舵機反轉,儲存盤歸位,完成存鞋。取鞋流程為存鞋流程的逆過程。

1.同步帶;2.壓板;3.同步帶輪;4.電機;5.導軌;6.滑塊;7.軸。

1.主軸;2.電磁制動器;3.儲存盤;4.轉盤;5.舵機。
3 參數設計及校核
3.1 夾持機構參數設計
夾持機構需伸入鞋口將多級連桿展開以夾持鞋子,不同鞋碼的鞋子內長有較大差別,需計算多級連桿的級數及伸展后的長度以適配鞋內長。經調研分析,女性鞋碼一般分布于34~40碼,集中分布于36~38碼;男性鞋碼一般分布于38~44碼,集中分布于40~43碼。多級連桿的每一級單個連桿尺寸設定為25 mm,采用5~6級的多級連桿,實測多級連桿伸展固定后的最大長度為95~118 mm。在多級連桿完全伸展時,測得模型中上下連桿的中心距離為24.67 mm,完全壓縮時上下連桿的中心距離為4.52 mm,故多級連桿在此壓縮過程的行程為20.15 mm。上述行程能夠適應絕大多數用戶的鞋內長,確定多級連桿級數為6級,每級長度25 mm。為保證連桿的順利伸長和復位,選擇線徑為0.6 mm、半徑為6 mm、工作長度為20 mm、勁度系數為160 N/m的拉伸彈簧。

圖6 存鞋流程圖
3.2 同步帶選型設計
同步帶傳動用于實現輔助脫鞋機構的進出,其參數影響鞋柜的存取速度和用戶體驗。確定同步帶的齒型、齒數、帶寬及帶長尤為關鍵。同步帶選型步驟具體為,測得輔助脫鞋機構在實驗室地板上的最大摩擦力為25.5 N,預估同步帶速度為=0.8 m/s,計算得到傳動功率為0.0204 kW,兩根同步帶水平對稱布置,單根同步帶傳動功率為=0.0102 kW。依此數據進行設計計算[11]。
設計功率為:

式中:P為設計功率,kW;K為工況系數,取1.4。
同步帶速度為:

式中:為同步帶速度,m/s;1為小帶輪節圓直徑,mm;1為小帶輪轉速,初定為900 r/min。

根據圓弧齒的小帶輪和大帶輪的節圓直徑和初定中心距,帶的節線長度計算公式為[11]:
式中:0p為初定帶的節線長度,mm;0為初定中心距,mm;2為大帶輪節圓直徑,mm。
鞋柜中的同步帶傳動系統通過同步帶壓板將同步帶與輔助脫鞋機構聯接實現傳動,因此同步帶傳動比設定為1:1將會簡化結構設計,此時,大帶輪齒數2=18,2=17.19 mm,0=533 mm。
實際中心距為:

式中:為實際中心距,mm;L為帶長,mm。
根據文獻[11]中的圓弧齒帶節線長度表,就近選取L=1125 mm。
小帶輪嚙合齒數為[11]:

式中:z為小帶輪嚙合齒數;p為節距,mm。
圓弧齒的帶寬為[11]:

式中:b為帶寬,mm;b0為選定型號的基準寬度,mm,取b0=6 mm[11];K為圓弧齒帶長系數,取1.20;K為小帶輪嚙合齒數系數,取1;0為基準額定功率,kW,查表得0.015 kW[11]。
作用在軸上的力為[11]:


3.3 仿真分析
夾持機構與絲杠系統間的連接板在傳動中需要傳遞絲杠施加于夾持機構的作用力,是鞋柜中所受應力較大的零件。通過有限元分析進一步確定其材料及厚度。
初步選取3 mm厚度的6061鋁合金為設計方案并進行有限元分析。完成夾持機構的裝配后,測得下壓時最大壓力為11.72 N。
許用應力為:

設定連接板左側端面固定,對下端受力面施加11.72 N豎直向上的均布力。

對厚度為3 mm的6061鋁合金連接板進行受力時的位移分析,分析結果如圖7(b)所示,最大位移為5.23 mm,符合要求。

圖7 單元化轉接件有限元分析
依據上述有限元分析的應力和位移結果,確定選取3 mm厚度的6061鋁合金鈑金加工為此零件加工方案。
4 控制系統
4.1 硬件設計
硬件設計采用STC15和ARM架構芯片系統設計。其中STC15負責運動控制,ARM系統作為網絡控制器。該架構可以高效率實現物聯網控制,并減少網絡延誤和電路噪聲帶來的影響。采用PCB工藝制作MCU外圍電路以及電源電路,完成兩個控制器之間的通訊鏈路。
4.2 軟件搭建
鞋柜軟件設計以物聯網控制為主要架構,使用物聯網云平臺技術實現網絡連接和硬件控制。通訊協議采用MQTT V1.5輕量化協議。并使用HTML設計用戶和交互UI。采用BS架構搭建,用戶可以在可移動設備上操控鞋柜完成取鞋,放鞋等一系列功能。
5 樣機測試
圖8所示為自動存取鞋柜的樣機圖。測試中,鞋后跟對輔助脫鞋機構中彈簧桿陣列施加壓力后,彈簧桿陣列貼合鞋后跟外形,可在用戶脫鞋時提供豎直向下的摩擦力以輔助脫鞋。夾持機構能夠良好地夾持鞋子且可以在絲杠系統的帶動下將鞋子穩定抬升。
鞋柜的基本尺寸長寬高分別為760 mm、678 mm和800 mm,測試樣機的最大儲鞋量為10雙,通過增加存鞋層數和對應單元模塊可以進一步增大存鞋量。圖9所示為5次存鞋和取鞋的完整流程測試,其中存鞋平均時長為40.4 s,取鞋平均時長為43.4 s。其他關鍵測試數據如表1所示。
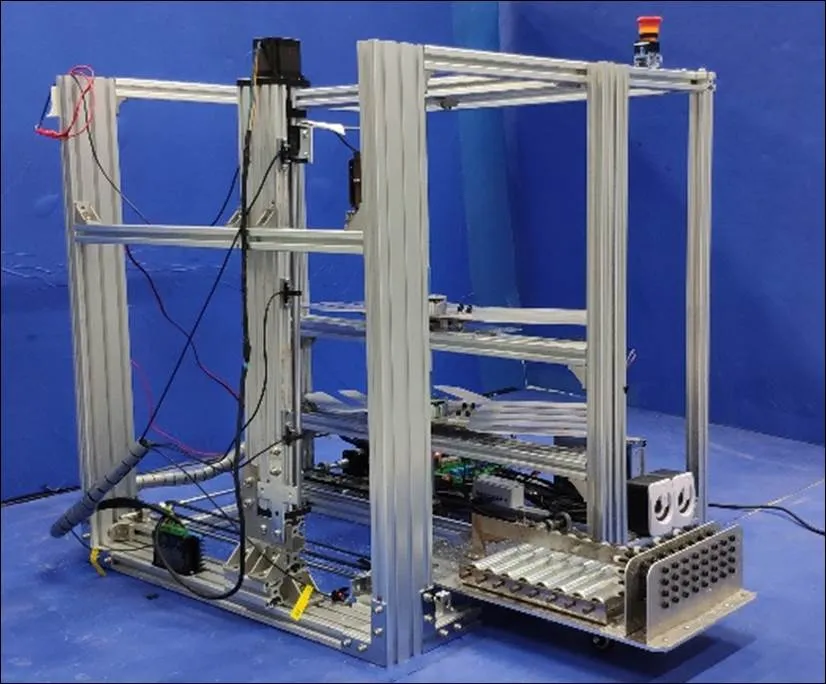
圖8 自動存儲鞋柜樣機

圖9 存鞋和取鞋測試結果

表1 測試數據
6 結語
本文設計并制作了一款可以自動化存取鞋子的智能鞋柜,存鞋時通過輔助脫鞋機構輔助用戶脫下鞋子后,鞋子由鞋柜內部的傳動系統傳送至用戶指定的儲存位置進行儲存。取鞋時用戶通過選擇對應儲存位置的鞋子,經由內部傳動系統傳送至輔助脫鞋機構并將其送出鞋柜。該智能鞋柜能夠解放雙手存儲鞋子,滿足多種家居場景需求,具備廣闊的市場前景。
[1]林育坤,王小琴,靳亞超. 從理念到現實的智能家具——一種新型智能鞋柜的設計[J]. 黑龍江科技信息,2016(35):54-55.
[2]卜許輝,李志剛,殷成,等. 自動化智能鞋柜的設計[J]. 現代制造技術與裝備,2019(7):59-60,64.
[3]王佳權,王皓,陳少勇,等. 基于物聯網的智能鞋柜系統設計[J]. 電子技術應用,2017,43(3):84-87,91.
[4]戈忠義,王樂,汪語哲,等. 基于STM32單片機的閉環反饋控制節能鞋柜系統設計[J]. 節能,2019,38(1):65-68.
[5]侯孟暉. 一種具有可升降旋轉功能的自動化殺菌鞋柜設計[J]. 科技傳播,2019,11(2):151-152.
[6]吳燕. 基于WiFi的多功能智能鞋柜設計與實現[J]. 電子制作,2020(17):36-38,92.
[7]海翔宇,楊宛螢,黃韜,等. 家用智能多方位清洗式鞋柜設計[J]. 中國新技術新產品,2020(9):4-5.
[8]李成鳳,況春華,張陽偉,等. 基于物聯網的可升降鞋柜設計及實現[J]. 通化師范學院學報,2021,42(4):1-6.
[9]秦川,孫沐鈺,袁嘉鑫. 智能家用自動存取鞋柜的設計[J]. 南方農機,2020,51(5):238,240.
[10]柳錦宏,薛琴,何偉鴻,等. 家用小型旋轉式智能鞋柜設計[J]. 現代工業經濟和信息化,2021,11(2):44-45.
[11]成大先. 機械設計手冊[M]. 4版. 北京:化學工業出版社,2002(13):60-94.
[12]朱浩,呂丹,朱亮,等.6061鋁合金斷裂機理的原位拉伸研究[J]. 機械工程學報,2009,45(2):94-99.
Structural Design of an Intelligent Shoe Cabinet with Automatic Access
TANG Junjie,CHEN Jiancen,ZHANG Wenchang,LIANG Hongjie,WANG Pengfei
(College of Mechatronics and Control Engineering, Shenzhen University, Shenzhen518060, China)
Aiming at the problems that elderly users of traditional shoe cabinets are easy to be injured when bending over to take off their shoes, and manual placement is easy to be messy, an intelligent shoe cabinet with automatic access is designed. According to the requirements of auxiliary shoe removal and automatic access, auxiliary shoe removal mechanism, clamping mechanism and turntable storage system are applied, and the corresponding IOT control system is constructed. The SolidWorks software is used for modeling and simulation, which verifies the feasibility of the shoe cabinet. Finally, the results of the prototype test show that the system can efficiently realize the functions of assisting shoe removal and automatic access. The intelligent shoe cabinet can free the users’ hands from placing or fetching the shoes, meet the needs of a variety of home scenes, and has a broad market prospect.
intelligent shoe cabinet;automatic access;taking-off mechanism;clamping mechanism
TP242
A
10.3969/j.issn.1006-0316.2022.08.010
1006-0316 (2022) 08-0062-07
2021-11-01
深圳大學聚徒教學項目(202132);廣東省大學生創新訓練計劃項目(201910590092);深圳大學學生創新發展基金基礎實驗項目(2019154)
湯俊杰(1999-),男,廣東梅州人,主要研究方向為機械設計制造及其自動化,E-mail:townjj@126.com。*通訊作者:汪朋飛(1983-),男,湖北天門人,博士,副教授,主要研究方向為機械創新設計與摩擦學,E-mail:wangpf@szu.edu.cn。
猜你喜歡
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
