海洋掃測(cè)聲吶技術(shù)綜述
2022-09-29 14:13:46耿家營(yíng)
中阿科技論壇(中英文) 2022年9期
耿家營(yíng)
(海軍潛艇學(xué)院,山東 青島 266046)
海洋掃測(cè)聲吶是人類(lèi)對(duì)海底目標(biāo)進(jìn)行大范圍掃測(cè)定位的主要裝備[1],使用較廣的主要包括側(cè)掃聲吶、多波束聲吶、合成孔徑聲吶3類(lèi),這3類(lèi)聲吶的工作原理不同,故在技術(shù)優(yōu)勢(shì)、適用場(chǎng)景上也不相同。文章對(duì)這3種聲吶技術(shù)特點(diǎn)進(jìn)行研究,分析不同聲吶技術(shù)的優(yōu)點(diǎn),以提高掃測(cè)作業(yè)裝備選型適用性。
1 側(cè)掃聲吶裝備技術(shù)
1.1 基本工作原理
側(cè)掃聲吶是一種通過(guò)在雙側(cè)布設(shè)指向性換能器,利用回聲測(cè)距原理來(lái)測(cè)量海底信息和水下物體的海洋探測(cè)設(shè)備。側(cè)掃聲吶系統(tǒng)一般為拖曳式,由拖曳體(拖魚(yú))、數(shù)據(jù)纜和甲板單元3部分組成。掃測(cè)作業(yè)時(shí),母船只拖動(dòng)拖魚(yú)在海水中航行,在拖魚(yú)的兩側(cè)各產(chǎn)生一束與航向垂直的扇形波束,形成以換能器為中心的窄梯形腳印,如圖1所示。聲波在水中遇到物體或碰到海底后,因反向散射傳回?fù)Q能器,聲信號(hào)被換能器轉(zhuǎn)換為電信號(hào),經(jīng)濾波處理進(jìn)行顯示存儲(chǔ),信號(hào)波動(dòng)幅度反映了海底起伏及地質(zhì)情況。

圖1 側(cè)掃聲吶工作示意圖
1.2 關(guān)鍵技術(shù)
(1)圖像插值技術(shù):側(cè)掃聲吶在作業(yè)過(guò)程中,因航速不穩(wěn)定或抖動(dòng),圖像會(huì)出現(xiàn)一定的變形失真。為增強(qiáng)圖像的顯示效果,常采用雙線(xiàn)性插值法對(duì)圖像進(jìn)行處理,填補(bǔ)圖像中的縫隙,實(shí)現(xiàn)圖像的連續(xù)顯示。處理前后的圖像對(duì)比可以看出,插值技術(shù)提高了圖像的清晰度,如圖2所示。

圖2 插值前后的圖像對(duì)比
(2)圖像姿態(tài)矯正技術(shù):受海洋環(huán)境中洋流等因素的影響,拖魚(yú)航行過(guò)程中會(huì)出現(xiàn)搖晃擺動(dòng)或者由于其他原因引起的航向角的變化,難以保證良好的水下姿態(tài)。拖魚(yú)姿態(tài)的變化會(huì)導(dǎo)致圖像坐標(biāo)產(chǎn)生一定的偏差,通過(guò)建立坐標(biāo)旋轉(zhuǎn)模型,對(duì)拖魚(yú)的航向角、橫搖角和縱搖角進(jìn)行校正,可以提高航跡的穩(wěn)定性,校正結(jié)果如圖3所示,可以看出圖像經(jīng)過(guò)校正后,顯示更加清晰,地貌地形顯示更為清楚。

圖3 姿態(tài)校正圖像
(3)圖像拼接技術(shù):由于側(cè)掃聲吶圖像條帶間是相互獨(dú)立的,需要基于地理坐標(biāo)等信息對(duì)圖像進(jìn)行匹配,再融合拼接為一個(gè)完成且連續(xù)的圖像,常用基于變換域或空間域的圖像拼接技術(shù)。圖像拼接結(jié)果如圖4所示,可以看出經(jīng)過(guò)拼接后的圖像能夠顯示海底全局,能夠增加側(cè)掃聲吶成像的可視化效果[2]。

圖4 圖像拼接結(jié)果
1.3 主流裝備型號(hào)及應(yīng)用場(chǎng)景
側(cè)掃聲吶主流型號(hào)裝備主要包括Klein 3000系列、Edge Tech 4200系列、Shark S450系列,主要應(yīng)用于海洋測(cè)繪、海洋地質(zhì)調(diào)查、海洋工程勘探及水下沉船沉物尋找等領(lǐng)域。
例如,2017年4月采用側(cè)掃聲吶(Klein 3000,445 kHz)進(jìn)行礁區(qū)數(shù)據(jù)采集。實(shí)驗(yàn)證明,應(yīng)用側(cè)掃聲吶技術(shù)能夠?qū)5捉甘M(jìn)行直觀、大范圍的探測(cè),能夠讀取細(xì)微信息,作業(yè)效率較高,可對(duì)礁石的整體分布、穩(wěn)性進(jìn)行客觀評(píng)估,如圖5所示。

圖5 側(cè)掃聲吶捕獲的礁體布局圖
2 多波束測(cè)深聲吶裝備技術(shù)
2.1 基本工作原理
多波束測(cè)深聲吶采用Mills交叉結(jié)構(gòu)的換能器陣列,該技術(shù)發(fā)射方式與側(cè)掃聲吶類(lèi)似,接收時(shí)通過(guò)垂直陣對(duì)接收到的聲波信號(hào)進(jìn)行相干累加,對(duì)預(yù)設(shè)角度方向信號(hào)進(jìn)行逐個(gè)接收,最終得到所需覆蓋范圍內(nèi)的時(shí)間-方位圖,如圖6所示。

圖6 多波束測(cè)深聲吶工作原理示意圖
2.2 關(guān)鍵技術(shù)
(1)寬覆蓋高分辨多波束測(cè)深技術(shù):多波束聲吶的測(cè)深精度與覆蓋寬度兩個(gè)指標(biāo)是一對(duì)矛盾。由于聲信號(hào)存在衰減(基于擴(kuò)散和吸收現(xiàn)象),邊緣波束測(cè)量海底目標(biāo)時(shí)很難滿(mǎn)足寬覆蓋測(cè)量的要求。為破解這對(duì)矛盾,一般采用LFM信號(hào)和編碼信號(hào)脈沖壓縮的方法提高聲信號(hào)信噪比,實(shí)現(xiàn)測(cè)深精度與覆蓋寬度兩個(gè)指標(biāo)的統(tǒng)一[3]。
(2)Multi-Ping技術(shù):在常規(guī)多波束測(cè)量中,往往都是單次發(fā)射脈沖信號(hào),以避免脈沖信號(hào)之間的干擾,需要等最遠(yuǎn)處的回波信號(hào)返回?fù)Q能器后才能再次發(fā)射,這勢(shì)必降低了信號(hào)刷新率。因此,要想獲得精細(xì)的海底信息,需要作業(yè)母船保持低速航行。而采用多脈沖技術(shù),能同時(shí)向多方向發(fā)射不同頻率的脈沖聲信號(hào),使得單次探測(cè)信息量增加,信息刷新率提高[4]。
(3)橫搖穩(wěn)定技術(shù):受風(fēng)和海流的影響,多波束聲吶在掃測(cè)過(guò)程中會(huì)受母船姿態(tài)影響,測(cè)量地形深度與實(shí)際深度會(huì)產(chǎn)生誤差,影響探測(cè)精準(zhǔn)度。可通過(guò)測(cè)量拖體姿態(tài)數(shù)據(jù),將測(cè)量地形數(shù)據(jù)與之匹配補(bǔ)償,最終補(bǔ)償橫搖產(chǎn)生的數(shù)據(jù)誤差。
2.3 主流裝備型號(hào)及應(yīng)用場(chǎng)景
目前,技術(shù)較為成熟且得到廣泛應(yīng)用的多波束測(cè)深聲吶型號(hào)包括EM 2040(挪威Kongsberg 公司)、SONIC 2024(美國(guó)R2Sonic 公司)、Seabat 7125(丹麥Reson 公司)等,主要的應(yīng)用場(chǎng)景包括水下地形地貌測(cè)繪、海洋工程施工保障、河道清淤效果監(jiān)測(cè)等。
例如,在使用EM 2040多波束測(cè)深系統(tǒng)對(duì)舟山某海域進(jìn)行的地形結(jié)構(gòu)測(cè)量作業(yè)中顯示(如圖7所示),在平均水深超過(guò)40 m的條件下,能夠形成良好的測(cè)量效果圖,能夠明顯識(shí)別出水底的特殊地物。

圖7 EM 2040典型目標(biāo)探測(cè)結(jié)果
3 合成孔徑聲吶裝備技術(shù)
3.1 基本工作原理
合成孔徑聲吶也稱(chēng)為“虛擬孔徑側(cè)掃聲吶”,其基本原理是通過(guò)小孔徑聲吶基陣在航跡向上的移動(dòng),通過(guò)對(duì)照射信號(hào)的不斷相干累加處理,得到一個(gè)等效的虛擬大孔徑基陣,以獲得相對(duì)較高的分辨率[5]。合成孔徑成像需要計(jì)算在不同采樣位置時(shí),各掃描像素點(diǎn)到發(fā)射位置和接收位置的距離,從而計(jì)算得到聲波傳播時(shí)間,補(bǔ)償不同位置的相位差[5]。合成孔徑聲吶的技術(shù)優(yōu)勢(shì)在于其航跡向分辨率與作用距離和信號(hào)頻率無(wú)關(guān),只由發(fā)射陣元孔徑?jīng)Q定,其基本原理如圖8所示。
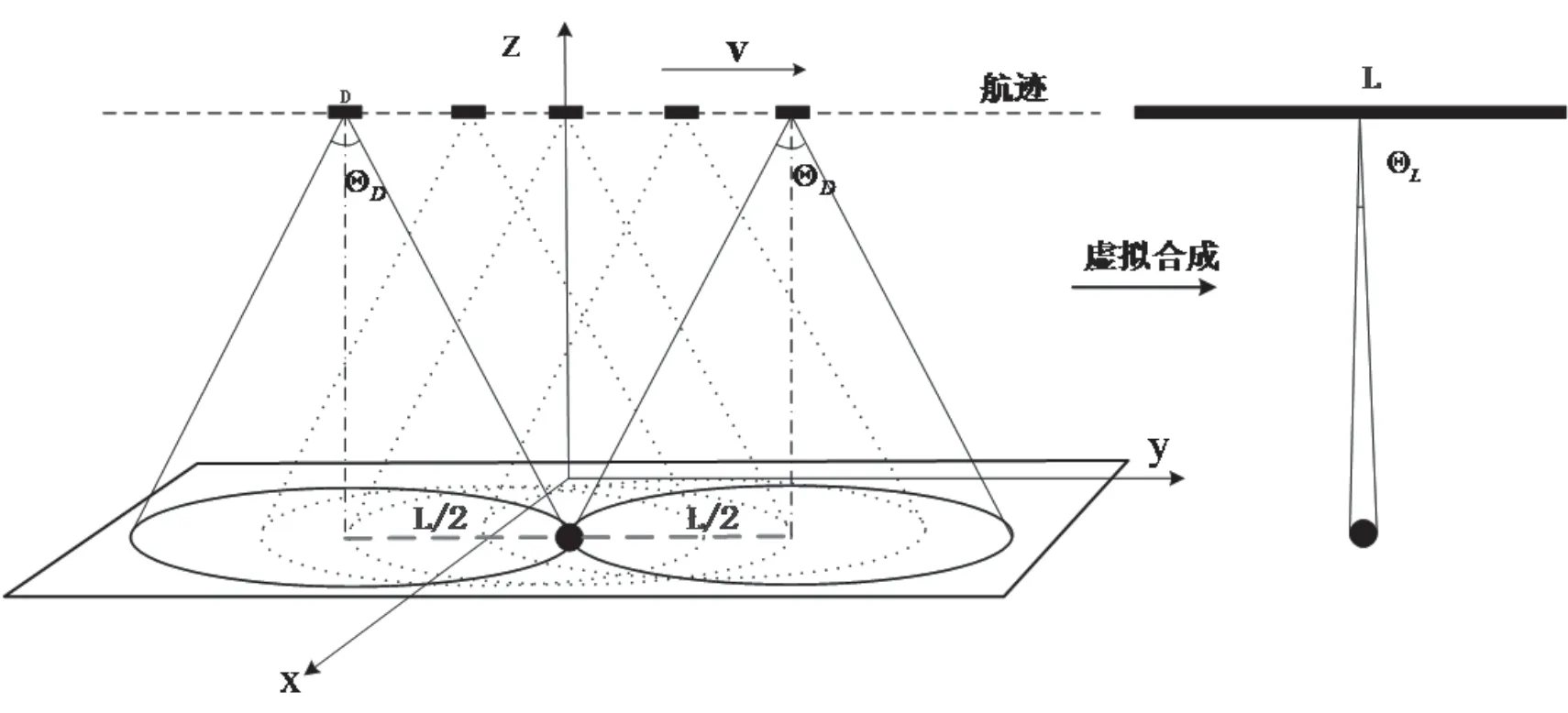
圖8 合成孔徑聲吶基本原理示意圖
3.2 關(guān)鍵技術(shù)
(1)目標(biāo)回波仿真技術(shù):在合成孔徑聲吶技術(shù)的研究中,受到外場(chǎng)條件制約,成像仿真數(shù)據(jù)的研究是進(jìn)度驗(yàn)證的必要手段。相對(duì)精準(zhǔn)的回波仿真可解決實(shí)際實(shí)驗(yàn)中無(wú)法精準(zhǔn)定位的問(wèn)題,找到成像算法和運(yùn)動(dòng)補(bǔ)償算法中存在的不足,提高掃測(cè)精度。
(2)運(yùn)動(dòng)姿態(tài)估計(jì)與補(bǔ)償技術(shù):合成孔徑成像算法其中一個(gè)前提是基于聲吶陣能夠進(jìn)行理想的勻速直線(xiàn)運(yùn)動(dòng)。而實(shí)際海洋環(huán)境中,風(fēng)、流、涌浪對(duì)聲吶陣運(yùn)動(dòng)軌跡的影響較大,呈現(xiàn)隨機(jī)性,致使信號(hào)存在較大誤差,合成虛擬孔徑的長(zhǎng)度較小,分辨率得不到保證。為保證成像質(zhì)量,聲吶載體除了通過(guò)外部因素穩(wěn)定航跡外,還需要對(duì)運(yùn)動(dòng)姿態(tài)進(jìn)行采集,對(duì)測(cè)量軌跡進(jìn)行補(bǔ)償矯正后,再進(jìn)行合成計(jì)算,得到相對(duì)可控的成像質(zhì)量。
(3)高精度成像算法:利用聲吶基陣陣元采集的回波數(shù)據(jù)進(jìn)行相干處理后,在距離向和方位向上形成的高分辨率圖像[6]。按信號(hào)處理域的不同,合成孔徑成像算法可分為時(shí)域算法和頻域算法。逐點(diǎn)成像法是時(shí)域算法的典型方法,其原理是在時(shí)域中對(duì)每一像素點(diǎn)進(jìn)行二維移變?yōu)V波匹配成像,由于需要對(duì)像素點(diǎn)逐個(gè)處理,因此,該方法適用于計(jì)算量不大的情況。而頻域算法可彌補(bǔ)該方法的不足,適用于較大數(shù)據(jù)量的處理,處理效率較高。
3.3 主流型號(hào)裝備及性能
經(jīng)過(guò)數(shù)十年的技術(shù)發(fā)展,合成孔徑聲吶已經(jīng)從原理驗(yàn)證階段走向了工程化、產(chǎn)品化階段,國(guó)內(nèi)外多家聲吶設(shè)備廠商已經(jīng)能夠提供系列化的合成孔徑聲吶設(shè)備,主要包括挪威Kongsberg公司的HISAS 1030、美國(guó)iXBlue公司IXSEA旗下的SHADOWS及中科院自研產(chǎn)品等。合成孔徑聲吶的技術(shù)特點(diǎn)是在距離向上具有較高的分辨率,在方位向上的成像分辨率與作用距離無(wú)關(guān),能夠獲得恒定的成像分辨率,但對(duì)目標(biāo)深度估計(jì)精度不足,因此較為適用于水下的精細(xì)化目標(biāo)圖像探測(cè)、沉船打撈和失事飛機(jī)搜尋。
例如,挪威海軍曾在霍爾滕外海利用HISAS 1030進(jìn)行三維圖像獲取[7],探測(cè)區(qū)域水深20~120 m,探測(cè)到一艘二戰(zhàn)時(shí)期的沉船,結(jié)果清晰可見(jiàn),在航跡向上具有較高的成像分辨率,距離60~140 m范圍內(nèi),如圖9所示。

圖9 HISAS 1030探測(cè)沉船實(shí)例
4 裝備的使用選擇分析
4.1 裝備技術(shù)優(yōu)勢(shì)
通過(guò)對(duì)上述裝備技術(shù)的系統(tǒng)分析,總結(jié)出3類(lèi)聲吶的作業(yè)特點(diǎn)及技術(shù)優(yōu)勢(shì)。
側(cè)掃聲吶基陣結(jié)構(gòu)簡(jiǎn)單,采用拖曳式進(jìn)行掃測(cè)作業(yè),二維成像分辨率較高,適合大面積、快速的粗略?huà)邷y(cè)。該技術(shù)適用于目標(biāo)的有無(wú)和位置探測(cè),對(duì)目標(biāo)深度值估計(jì)精度要求不高時(shí),可以采用此類(lèi)裝備。
多波束測(cè)深聲吶能夠獲得探測(cè)區(qū)域的高分辨三維成像結(jié)果,且探測(cè)區(qū)域沒(méi)有縫隙,測(cè)深精度較高,適用于大面積海床的精確深度測(cè)量。對(duì)近底目標(biāo)進(jìn)行主動(dòng)探測(cè)時(shí),可以使用該類(lèi)裝備進(jìn)行精細(xì)化的三維測(cè)量。
合成孔徑聲吶是在側(cè)掃聲吶基礎(chǔ)上發(fā)展起來(lái)的、在航跡向上具有恒定成像分辨率的高分辨成像聲吶。該類(lèi)技術(shù)的成像分辨率遠(yuǎn)高于側(cè)掃聲吶,通常需要配備多波束測(cè)深聲吶進(jìn)行補(bǔ)隙,從而實(shí)現(xiàn)對(duì)目標(biāo)的精細(xì)化測(cè)量。當(dāng)需要高分辨率的目標(biāo)探測(cè)圖像時(shí),可以采用此類(lèi)裝備。但是該類(lèi)裝備系統(tǒng)復(fù)雜,成本較高且實(shí)時(shí)成像效果有待提升。
4.2 選擇要素
為提高掃測(cè)作業(yè)時(shí)聲吶選型的科學(xué)性,從作業(yè)信息獲取的優(yōu)先級(jí)別分4個(gè)方面進(jìn)行分析。
一是拖曳方式方面。根據(jù)聲吶工作原理,側(cè)掃聲吶、合成孔徑聲吶一般采用拖曳式作業(yè),利用吊車(chē)或纜繩在作業(yè)母船的舷側(cè)或船尾進(jìn)行作業(yè),而多波束測(cè)深聲吶一般搭載在船底或船側(cè)展開(kāi)作業(yè),需要進(jìn)行固定布放。因此,母船的搭載能力是選擇裝備類(lèi)型的第一要素。
二是作業(yè)水深方面。側(cè)掃聲吶、合成孔徑聲吶需要有纜作業(yè),受水流阻力的影響,聲吶拖魚(yú)會(huì)后滯母船較大距離,若要拖魚(yú)布放至預(yù)定深度,須持續(xù)放纜。較長(zhǎng)的纜繩將大幅增加母船轉(zhuǎn)向時(shí)間,降低掃測(cè)效率。一般使用側(cè)掃聲吶作業(yè)、合成孔徑聲吶須視掃測(cè)海區(qū)決定,近海一般不超過(guò)500 m。多波束聲吶能夠不受水深的限制展開(kāi)作業(yè),但受波束發(fā)散的影響,聲吶分辨率隨水深的增大而持續(xù)降低。
三是搜索目標(biāo)類(lèi)型方面。側(cè)掃聲吶、合成孔徑聲吶均呈現(xiàn)出二維圖像,多波束測(cè)深聲吶呈現(xiàn)出三維圖像。對(duì)輪廓明顯目標(biāo)進(jìn)行搜索時(shí),可采用側(cè)掃聲吶、合成孔徑聲吶;對(duì)輪廓不明顯目標(biāo)或水下地形進(jìn)行測(cè)量時(shí),可采用多波束測(cè)深聲吶。
四是成像分辨率方面。合成孔徑聲吶由于虛擬較大孔徑,在航跡向上具有恒定成像分辨率,側(cè)掃聲吶和多波束聲吶分辨率適中,但多波束測(cè)深聲吶會(huì)隨水深發(fā)散作用,不適于較大深度場(chǎng)景作業(yè)。
5 結(jié)論
綜上,各類(lèi)型聲吶裝備技術(shù)優(yōu)勢(shì)各不相同,具體選擇的結(jié)果并非一成不變,應(yīng)根據(jù)任務(wù)需求進(jìn)行系統(tǒng)分析后,選擇適當(dāng)?shù)奶綔y(cè)裝備,必要時(shí)可多種技術(shù)裝備聯(lián)合使用以提升目標(biāo)的探測(cè)準(zhǔn)確性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
