網(wǎng)聯(lián)車輛事件觸發(fā)H2/H∞滾動時域狀態(tài)估計
2022-10-01 13:18:44宋秀蘭許楷文周文樂
浙江工業(yè)大學學報 2022年5期
關鍵詞:系統(tǒng)
宋秀蘭,許楷文,周文樂
(浙江工業(yè)大學 信息工程學院,浙江 杭州 310023)
隨著車輛普及率的迅速提高,道路車流量急速增加,導致道路頻繁擁塞及交通事故不斷發(fā)生。得益于無線通信網(wǎng)絡技術的發(fā)展,車輛協(xié)同自適應巡航控制(Cooperative adaptive cruise control,CACC)[1-3]系統(tǒng)能夠對智能網(wǎng)聯(lián)車輛進行有序編隊,以實現(xiàn)車輛間的協(xié)同巡航駕駛,進而保證車輛安全、高效行駛。對于網(wǎng)聯(lián)車輛CACC系統(tǒng)的狀態(tài)數(shù)據(jù)進行估計[4-6]是當前許多學者的關注內(nèi)容,現(xiàn)有文獻已經(jīng)有一些成熟有效的狀態(tài)估計算法,如卡爾曼濾波[7-9],滾動時域估計[10]等。文獻[11]在數(shù)據(jù)會受到攻擊的情況下使用了無跡卡爾曼濾波器進行車輛巡航狀態(tài)估計;文獻[12]則將卡爾曼濾波應用于數(shù)據(jù)攻擊之中。又如滾動時域估計,文獻[13]在車輛具有不確定噪聲的情況下,采用滾動時域估計對車輛的縱向位置進行估計;文獻[14]中則將滾動時域估計與隨機接入?yún)f(xié)議相結合,在考慮接入節(jié)點隨機性的情況下進行狀態(tài)估計;文獻[15]則在滾動時域估計器中同時考慮量化與丟包的約束。但現(xiàn)有車輛巡航狀態(tài)的估計器并沒有充分考慮時間觸發(fā)引起的車輛無線通信網(wǎng)絡信道頻繁占用問題。與時間觸發(fā)策略相對應的事件觸發(fā)策略[16]有很大的潛力來解決按時間觸發(fā)的局限性,克服時間觸發(fā)策略的保守性,提升狀態(tài)估計效率。例如,文獻[17]針對受高斯噪聲影響的線性系統(tǒng),提出了一種基于事件觸發(fā)的最大似然狀態(tài)估計算法;文獻[18]則針對馬爾科夫跳躍系統(tǒng)進行事件觸發(fā)估計;文獻[19]則將事件觸發(fā)作為檢測故障的一種方法應用到狀態(tài)估計中去。
為了兼顧通信信道與云端估計器負擔,得到良好性能的網(wǎng)聯(lián)車隊CACC系統(tǒng)的狀態(tài)估計結果,筆者設計一種具有事件觸發(fā)條件的H2/H∞控制滾動時域估計算法。首先,建立基于網(wǎng)聯(lián)車輛隊列的自適應巡航控制系統(tǒng)的車隊模型,在此基礎上設計適用于車輛隊列的估計器模型;其次,通過車載傳感器獲得車頭時距等位置信息,在滾動時域估計框架下,建立基于事件觸發(fā)的CACC系統(tǒng)狀態(tài)估計機制,采用網(wǎng)絡通信的方式協(xié)調(diào)車輛與估計器之間的信息交換,在確保估計性能的前提下對系統(tǒng)狀態(tài)進行估計與預測;最后,以一個4輛車組成的網(wǎng)聯(lián)車隊系統(tǒng)為例,驗證筆者算法的有效性。
1 系統(tǒng)建模及問題描述
考慮由M輛在水平道路上同向巡航行駛的車組成的異構網(wǎng)聯(lián)車隊,網(wǎng)聯(lián)車隊CACC系統(tǒng)的云估計器示意圖如圖1所示。通過車聯(lián)網(wǎng)系統(tǒng)實現(xiàn)車間通信,車間拓撲結構為每一時刻后車通過V2V方式獲取前車各傳感器測量得到的速度及加速度數(shù)據(jù),并通過自身距離傳感器檢測與前車的車間距。網(wǎng)聯(lián)車輛獲得所有數(shù)據(jù)后,將該信息通過V2I等方式經(jīng)由路邊基站的信道上傳至云估計器。圖1中:si為第i車輛的縱向位置;vi為速度;ai為加速度;li為車長。在巡航過程中,采取固定車頭時距的安全控制策略,車頭時距用hi表示。
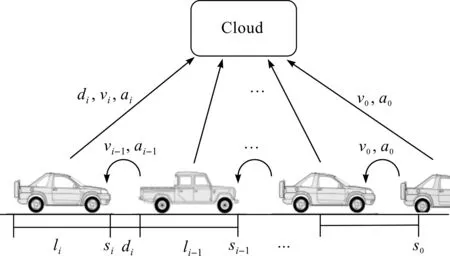
圖1 網(wǎng)聯(lián)車隊CACC系統(tǒng)云端估計器示意圖Fig.1 A schetmatic of cloud estimator for the CACCsystem of a conneted vehicle platoon
考慮圖1中第i輛車的CACC系統(tǒng)離散時間狀態(tài)空間模型[4]可表示為
(1)

(2)
其中

(3)
式中col為向量的列棧。進一步假設該車輛隊列CACC系統(tǒng)矩陣對(C,A)是可觀的,且CACC系統(tǒng)采用廣泛使用的比例-微分(PD)控制器設計,并假設對應閉環(huán)系統(tǒng)漸近穩(wěn)定,從而保證車輛實現(xiàn)穩(wěn)定跟馳目標,控制器參數(shù)見文獻[4]。此外,矩陣對(C,A)可觀意味著車輛隊列CACC系統(tǒng)是整體狀態(tài)能觀的,可以保證估計器能得到可靠結果。
為了減少估計器計算資源及通信資源的損耗,采用事件觸發(fā)機制控制車輛與云估計器間的通信頻率。設在k時刻觸發(fā)條件為rk:當rk=1時,表示當前時刻事件觸發(fā),即進行網(wǎng)絡傳輸,將車輛傳感器測量值經(jīng)由網(wǎng)絡信道上傳至云估計器進行估計;當rk=0時,則使用估計器端的開環(huán)估計器進行估計,其判決條件為
(4)

(5)

(6)
那么對于估計器而言,整體CACC系統(tǒng)的狀態(tài)方程可重新表示為
(7)

(8)


式中Π為先驗狀態(tài)在代價函數(shù)中所占的權重。可通過求解優(yōu)化問題得到狀態(tài)估計值,其計算式為

(9)
則網(wǎng)聯(lián)車輛CACC系統(tǒng)事件驅動狀態(tài)估計器設計目標為
1) 在不考慮噪聲干擾的情況下,該估計器漸近穩(wěn)定,且估計誤差最終收斂為0。
2 主要結果
設滾動時域窗口長度為N,令
Yk-N={yk-Nyk-N+1…yk}

(10)

(11)
其中

從而代價函數(shù)可轉化為

(12)
由于筆者約束為軟約束,求解代價函數(shù)的一階微分方程為
(13)
將式(13)與約束項引入后,做等式變換得


(14)

在假設1成立的情況下,式(14)可變化為

整理得

(15)

將估計誤差式(15)和式(3)與狀態(tài)變量聯(lián)立,可得

(16)
令增廣變量和矩陣為

則網(wǎng)聯(lián)車輛CACC系統(tǒng)狀態(tài)估計誤差和系統(tǒng)狀態(tài)的增廣系統(tǒng)可表示為
(17)
定理1考慮增廣系統(tǒng)式(17),對于矩陣П和給定的常數(shù)γ1,γ2,若存在對稱正定矩陣P>0,使不等式組
(18)




(19)
通過Shur補引理可得
(20)
進一步推導可得

(21)


定義狀態(tài)估計偏差代價函數(shù)為
則有
(23)
由式(20)可知

且有ΔVk>0,則J<0,整理后可得
(24)
即估計誤差系統(tǒng)在無噪聲干擾的情況下能保持漸近穩(wěn)定。
再選取適當?shù)腪矩陣,滿足矩陣不等式
(25)

定理1給出了使得狀態(tài)估計器達成設計目標的矩陣Π的設計要求,在求得滿足要求的矩陣Π后,可通過Π獲得CACC系統(tǒng)當前時刻狀態(tài)的最優(yōu)估計。
3 實例仿真
考慮4輛異構車隊CACC系統(tǒng),其中第1輛和第2輛車車型相同;第3輛和第4輛車車型相同。采用Matlab2019a作為筆者算法仿真平臺。設采樣間隔T=0.2 s,領航車速度滿足0≤v0≤5 m/s,權重矩陣Q=I3。車頭時距分別為h1=h2=1 s;h3=h4=1.2 s,車輛初始安全距離統(tǒng)一為d0=8 m。假設CACC系統(tǒng)噪聲滿足高斯白噪聲分布,方差為0.01。取N=4,則滾動時域估計長度為N+1=5。每輛車各具有3個不同的傳感器,觀測矩陣分別為C1=[1 0 0],C2=[0 1 0],C3=[0 0 1],即每個傳感器獨立監(jiān)視一項狀態(tài)值。本次設計中,事件觸發(fā)器的閾值取為噪聲標準差,即δ=0.1。領航車的各項設置如圖2所示。

圖2 領航車狀態(tài)設定Fig.2 Leading vehicle’s state profiles
使用筆者算法估計車隊CACC系統(tǒng)所需要的狀態(tài)信息,并將其與真實值進行比較,如圖3~7所示。本次領航車輛為預先設置加速度從而達到較為安全的領航效果,通過對比仿真驗證筆者算法的效果。由圖3~7可知:云端監(jiān)控平臺的估計器能成功估計網(wǎng)聯(lián)車隊各車輛各狀態(tài)。取車輛1的各項估計狀態(tài)結果進行觀察,即以圖4為例,可看到3條具有差異的仿真結果,其中帶圈點狀線為狀態(tài)的真實值,實線為筆者算法得到的估計值,而虛線代表為每時刻進行數(shù)據(jù)傳輸?shù)腍2/H∞滾動時域估計算法的估計值(MHE估計值)。將圖3~7對比后可發(fā)現(xiàn):相比H2/H∞滾動時域估計算法每一時刻都要進行狀態(tài)信息傳輸,筆者算法通過使用事件觸發(fā)機制,減少信息傳輸?shù)拇螖?shù);筆者算法能保持與H2/H∞滾動時域估計相近的估計效果,同時減輕了估計器的計算負擔,傳輸次數(shù)的降低也有利于通信信道的資源分配;使用事件觸發(fā)減少信息傳輸次數(shù)的同時,也降低了車輛在傳輸信息上所需要消耗的能源,提高了網(wǎng)聯(lián)車隊的經(jīng)濟性。由圖4可知:在初始狀態(tài)已知的情況下,筆者所設計的事件觸發(fā)H2/H∞滾動時域估計算法能將CACC網(wǎng)聯(lián)車隊巡航狀態(tài)準確估計出來。與常規(guī)H2/H∞滾動時域估計相比,兩者在估計效果都逼近真實值。在車輛加減速等情況及受到噪聲干擾時,筆者算法仍然有良好的跟蹤性能,通過事件觸發(fā)機制結果減少傳輸信息的次數(shù),并且在事件觸發(fā)后能夠將原本的估計誤差迅速減小。

圖3 CACC系統(tǒng)事件觸發(fā)狀態(tài)估計Fig.3 Event-triggered state estimation of the CACC system

圖4 車輛1估計結果Fig.4 Estimation results of vehicle 1
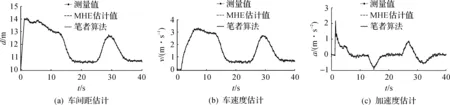
圖5 車輛2估計結果Fig.5 Estimation results of vehicle 2
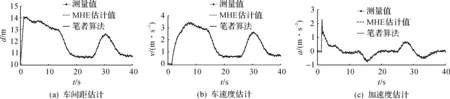
圖6 車輛3估計結果Fig.6 Estimation results of vehicle 3
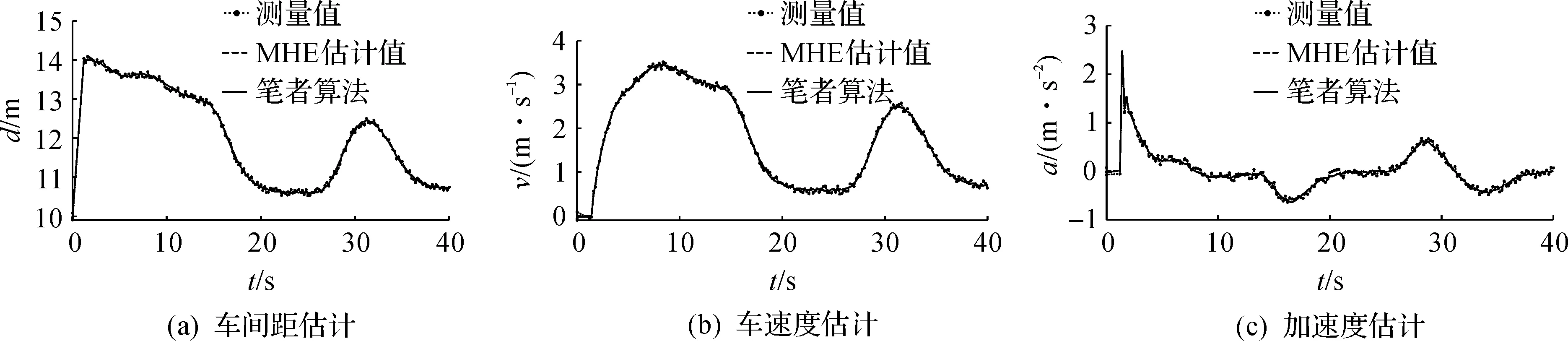
圖7 車輛4估計結果Fig.7 Estimation results of vehicle 4
4 結 論
給出了一種網(wǎng)聯(lián)車輛CACC系統(tǒng)事件觸發(fā)H2/H∞滾動時域估計算法,通過將H2/H∞性能與滾動時域估計相結合,保證了估計算法能在系統(tǒng)存在噪聲的情況下實現(xiàn)CACC系統(tǒng)狀態(tài)的最優(yōu)估計。進一步引入事件觸發(fā)概念,減少了車聯(lián)網(wǎng)通信信道的傳輸次數(shù),使筆者算法更具有經(jīng)濟意義及現(xiàn)實意義。與常規(guī)H2/H∞滾動時域估計算法仿真結果對比驗證了筆者算法的優(yōu)越性。基于筆者算法的設計框架,后續(xù)將開展車聯(lián)網(wǎng)絡在丟包、時延及信號衰減等工況下的網(wǎng)聯(lián)車輛CACC系統(tǒng)事件觸發(fā)H2/H∞滾動時域估計算法研究,以及實車的測試驗證研究。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32