半喂入式花生收獲關鍵結構優化設計
2022-10-03 04:56:34王松松朱代根
南方農機 2022年19期
王松松 , 朱代根
(西南林業大學機械與交通學院,云南 昆明 650000)
1 花生收獲機分類
花生的機械收獲方式主要有分段收獲與聯合收獲兩種。分段收獲是先將花生挖掘、抖土、鋪放,再通過撿拾摘果機進行撿拾、摘果;聯合收獲是一次完成花生挖掘、抖土、摘果等工序[1]。按花生植株的喂入摘果裝置的方式可分為全喂入式、半喂入式兩種,摘果裝置是花生收獲機上的重要的工作部件,對于摘果質量起到至關重要的作用。
全喂入花生收獲機適用于干花生植株的摘果作業,但存在功率消耗大、摘凈率不高、果實容易破損等缺點,秧蔓容易纏繞,花生秧蔓破碎嚴重,不易回收利用。半喂入花生收獲機在摘果作業時不會對花生植株產生較大的破壞,花生植株容易較完整地保留,花生植株可以作為優質的牲畜飼料再次利用。半喂入花生收獲機的適用性強,對于干濕花生秧蔓都可進行摘果作業,消耗功率小,但是結構復雜,成本較高。
1.1 全喂入式花生收獲機結構
全喂入式花生收獲機結構由撿拾裝置、輸送裝置、摘果輥筒、摘果齒、凹篩板構成,摘果齒安裝在摘果輥筒上。其工作原理是在帶果植株送入摘果裝置之后,摘果輥筒選擇運動,在摘果齒及凹篩板的共同作用下實現花生莢果和植株根部分離,隨后花生莢果由凹篩板落下,植株排出摘果裝置外。全喂入花生摘果裝置是將花生植株全部喂入摘果裝置中進行摘果。摘果滾筒可為封閉式或開式。摘果部件形式有釘齒式、蓖梳式、差動式、甩持式和螺旋紋桿式等,主要靠剛性摘果齒打擊、摘果齒與凹板之間形成相對拉拽作用而摘果[2]。
1.2 半喂入花生收獲機結構
半喂入花生收獲機的基本結構主要由挖掘鏟、扶禾器、夾持輸送機構、摘果裝置等組成。扶禾器是裝有撥齒的鏈條,具有較強的扶倒伏、梳理、整理花生植株的能力,可將待收花生植株由倒伏狀態從底向上、從兩邊向中間合攏變成直立狀態,按扶禾鏈條的回轉方向分傾斜面型、鉛錘面型兩種。挖掘鏟深入地下,將花生的根鏟斷,同時對附近土壤松土,減小撥株過程中的阻力。夾持輸送機構和摘果裝置通常上下配置,夾持輸送機構夾持花生植株并向后輸送,摘果裝置在花生植株向后輸送的同時完成花生莢果的摘果作業。整個工作原理是:扶禾器先將倒伏的花生植株重新扶起,同時挖掘鏟深入地下挖掘出花生植株,將經由扶禾器整理好的植株送到夾持鏈入口處,隨后被夾持鏈夾持住,被夾持鏈夾持花生植株的中上部往后有序輸送,花生植株根系部分在摘果裝置工作區域摘果,花生植株在摘果完成后送出夾持鏈。其中,夾持輸送機構和摘果裝置是半喂入花生收獲機的重要工作部件,負責將花生莢果從花生植株分離,決定了花生摘果效果。
2 摘果裝置關鍵部件分析
2.1 夾持輸送裝置
夾持輸送裝置的結構包括主動鏈輪、從動鏈輪、輸送鏈條、壓緊裝置等。影響輸送性能的關鍵因素主要有夾持鏈條的速度、夾持鏈條的型號以及三角區的幾何參數。夾持輸送機構是花生收獲機中十分關鍵的裝置,夾持輸送作業的穩定性和可靠性將直接影響花生收獲的質量,目前主要的夾持輸送裝置有三種結構,即雙帶夾持式、三帶夾持式、鏈條夾持式。雙帶夾持裝置由兩根V帶組成,靠張緊裝置對花生秧蔓產生夾持力,屬于柔性夾持,能夠減小在輸送的過程中對花生秧蔓的破壞[3];但是花生的收獲條件惡劣,V帶的使用周期較短可靠性不高,也因為V帶需要較大的張緊力,花生收獲機械效率下降明顯。三帶式夾持輸送裝置由三根V帶組成,一側單帶另一側雙帶,左右對立配置,單帶位于雙帶的中間,秧蔓在夾持的過程中是三點夾持,有著不錯的夾持效果,通過彈簧張緊裝置提供張緊力。三帶式增大了夾持部分的摩擦力,輸送性能更加可靠,但是V帶容易產生磨損從而導致失效,而且需要額外增加喂入裝置。鏈條式夾持輸送裝置由兩條夾持鏈條組成,該方式的夾持穩定性較好,能夠在惡劣的環境下工作,可靠性高[3]。
2.2 摘果裝置
摘果裝置是花生收獲作業中最為重要的裝置之一,通常由一對相向轉動的摘果輥筒組成,摘果輥筒上通常還設有摘果齒。摘果齒隨著摘果輥筒旋轉,在摘果齒的梳刷、曳拉下實現果秧分離。根據摘果輥筒的形式不同可以分為圓柱形和圓錐形,按花生秧蔓的輸送方向又可分為軸向式和徑向式,按摘果輥筒上的摘果齒可以分為剛性齒和彈性齒。為了減少在摘果過程中出現花生破碎率高的情況,目前摘果裝置采用彈性齒較多。
3 夾持鏈板及摘果裝置優化設計
3.1 齒形鏈板分析
將夾持鏈板的高度從低到高依次分為三個區域——A、B、C,如圖1所示。三個區域所承擔的作用各有不同,A區主要是非功能作用部分,工作時只考慮簡單的拉力。B區尺寸大小由兩方面決定,一方面是必要的強度尺寸,要保證相應的強度;另一方面鏈板尺寸由鏈條的功能來決定,如果需要夾持較厚的秧稈就可以把B區的尺寸設計較大。C區主要由一個齒組成,是插入秧稈層的部分。夾持空間的大小決定了一次夾入花生秧稈的多少,夾持空間的大小由齒高和α角度大小共同決定,其中α值既要保證齒部具有一定的強度不會在輸送過程中出現斷齒,同時要使夾持鏈鏈板與秧稈之間產生一定的夾持力;根據一般谷物秧稈與鋼的摩擦系數是0.6,得出αmax=118°,α小于這個角度能順利夾持秧稈同輸送鏈同步前進,所以理論上的α角越小越有利于輸送效率提高。但隨著α減小,要保證齒的強度不變的條件下,齒高則會變大。齒高和強度要求限制α角的最小值,設計中需要把握好齒高與強度的要求,同時過尖的齒頂也難以使鏈條達到較好的使用效果[4]。

圖1 齒形鏈板結構示意圖
花生植株秧稈直徑粗細不一,總體直徑較小,秧稈直徑在5 mm左右。在夾持空間大的情況下,需要一次性夾入過多的花生秧稈保證夾持力,實際中可能沒有夾入足夠秧稈,造成夾持力不足,出現脫秧的情況,影響摘果效率,造成機器堵塞。單齒夾持應力過于集中,增加齒數量分散夾持更加穩定。
對單鏈板進行優化設計,通過在單鏈板上增加齒的數量從而減小夾持區域,查詢相關資料,查詢JB/T 8883—2013《農業機械用夾持輸送鏈》,選擇鏈號S3325、節距為33 mm、內節內寬25 mm、滾子外徑10 mm、銷軸直徑7 mm、內外鏈板厚度1.6 mm,在此基礎上另行設計,增加齒的數量,減少夾持空間,齒形鏈板示意圖如圖2所示。
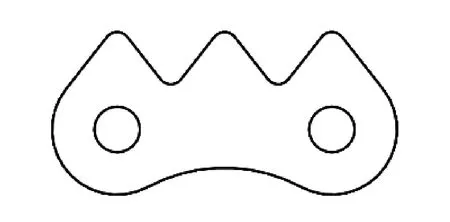
圖2 齒形鏈板示意圖
花生植株高度約400 mm,夾持部位一般在植株的中上部,與地面水平距離形成的最佳角度為35°[5]。在摘果過程中,夾持鏈提供的夾持力不僅要克服花生植株、花生莢果及附帶土壤的重力,還會受到摘果裝置對花生莢果施加向下的沖力,夾持力要能大于其總和,才能保證在摘果過程中不出現脫秧的情況,摘果過程順利進行。
夾持鏈大致可以分為夾持段、摘果段兩個部分。在夾持段中,花生植株只是單純地被夾持往后輸送,此時夾持力只需要克服花生植株本身的重力,單個夾持區域設計比較小,能夠實現很好的夾持效果。在花生植株進入摘果段時,對應的夾持鏈區域處設置壓桿、壓力傳感器,在開始摘果之前先由壓力傳感器檢測出夾持鏈施加在花生植株上的壓力,與預定值是否符合,如果小于預定值說明在夾持區域中花生秧稈不夠,則推動壓桿,減少夾持區域,使花生秧稈能夠被更好夾持住,避免出現花生從齒形鏈脫落的現象。房慶柳等[6-7]對花生秧稈剪切實驗中,在7天的晾曬中,剪切力由215 N降到90 N,隨著晾曬時間的增加剪切力不斷變小,半喂入式摘果沒有晾曬過程,可以參考開始的花生秧稈剪切力,設定壓桿的壓力,可以避免因壓桿提供的壓力過大而剪短花生秧稈。
3.2 摘果裝置設計
良好的摘果性能應該保證在花生莢果能夠順利摘下的同時減少花生莢果的破損率,花生莢果與果柄形成的果柄節點、果柄與花生秧形成的秧柄節點,這兩個地方的拉力值與摘果效率密切相關。南飛飛等[8-9]針對果柄斷點拉力和秧柄斷點拉力實驗數據的分析結果如圖3所示,秧柄節點的斷點拉力明顯大于果柄斷點拉力,在摘果過程中果柄節點更容易斷開。

圖3 果柄斷點拉力、秧柄斷點拉力實驗數據分析
在對花生莢果壓力的測試中,把花生根據體積大小劃分為大花生、普通花生、小花生三種類型。花生莢果破碎力如表1所示。不同的體積下對花生莢果破碎力有不同影響,求出每種類型花生的破碎力均值,體積越大的花生所能承受的破碎力也越大,在壓力的范圍為38.5 N~57.5 N時,會造成一些花生莢果破碎;在花生莢果面臨的壓力小于38.5 N時,不會使花生莢果破碎;在壓力大于57.5 N時,幾乎所有的花生莢果會破碎。

表1 花生莢果破碎力
花生莢果大小不一,花生莢果直徑在5 mm~20 mm之間,花生枝蔓直徑遠小于花生莢果直徑。摘果過程示意圖如圖4所示,摘果裝置由若干個齒組成,每個齒下方設有刃口,齒距設為5 mm,花生秧稈能夠穿過,花生莢果留在齒下方。工作原理是夾持鏈夾持花生植株向上輸送到達摘果段時,摘果齒隨后由上至下插入花生秧稈中,花生秧稈能夠順利通過齒隙,直到到達花生根部,不同秧稈在花生植株根部形成一個根部節點,該結構會阻礙花生植株的向上運動;隨著夾持鏈轉動,摘果齒使根部秧稈分開,由于摘果齒下方存在的刃口,所以能夠使根部秧稈更好地分離;花生秧稈能穿過齒的同時被夾持鏈往后輸送,花生莢果直徑大于齒距無法通過,在摘果齒的作用下實現摘果[10]。因為秧柄節點的斷點拉力大于果柄節點斷點拉力,花生莢果與果柄先一步分離,斷點拉力小于花生莢果的破損力,在花生莢果破碎之前就已實現秧果分離。摘果齒與花生秧稈根部節點發生接觸,對摘果齒與花生秧稈接觸處進行受力分析,如式(1)~式(4)、圖5所示。為保證摘果過程的順利,在接觸處的垂直方向的總夾持力應大于秧稈的剪切力,即F總≥F剪,才能使秧稈分離,已知秧稈的剪切力,就可推出秧稈所需的最小夾持力。

圖4 摘果過程示意圖


圖5 接觸處受力分析
式中:F1為秧稈受到的夾持力,F2為單根秧稈在垂直方向的夾持力,F總為在垂直方向的總夾持力,F剪為秧稈最大剪切力。從式中可以看出,F剪的大小由花生秧稈本身的物理特性確定,F1受到α的影響,余弦函數中α角度越小,值越大,F1越小,對齒形鏈需要提供的夾持力要求越小,在夾持力較小的情況下就能使花生植株根部秧稈分離,為后續順利摘果奠定基礎。
4 結語
通過對花生摘果原理的梳理,根據花生植株、花生莢果的物理特性,針對花生秧稈的剪切力分析,對施加在花生秧稈的夾持力進行分析,重新設計夾持鏈板、摘果裝置。由于在摘果裝置中沒有采用常規摘果輥筒,雖然減少了動力消耗,但是對裝置整體結構的強度提出更高的要求,同時夾持鏈板需要提供較大的夾持力,在保證摘果裝置本身的強度下,可以減小摘果齒的角度,滿足所需要的夾持力。整個摘果過程更加柔和,能夠減小花生莢果的破碎率。