
新標準電梯緊急操作裝置解讀
2022-10-09 08:37:56姚鍇袁曉金段志梅
機電工程技術 2022年9期
關鍵詞:電梯
姚鍇,袁曉金※,段志梅
(1.紅河州質量技術監督綜合檢測中心,云南蒙自 661199;2.紅河學院,云南蒙自 661199)
0 引言
我國電梯行業近十年得到了飛速的發展。無論是保有量、年產量還是安裝量都增長十分迅速。作為我國電梯行業最重要的技術標準《電梯制造與安裝安全規范》迎來了重要修訂,由原來的強制性標準GB7588-2003 +XG1-2015《電梯制造與安裝安全規范》修訂為推薦性標準GB/T 7588.1-2020《電梯制造與安裝安全規范第1 部分:乘客電梯和載貨電梯》和GB/T 7588.2-2020《電梯制造與安裝安全規范第2 部分:電梯部件的設計原則、計算和檢驗》。新標準的頒布與實施,對于規范我國電梯行業的技術規則、提升電梯產品質量和保障電梯安全運行等多方面具有舉足輕重的作用。新標準的實施時間為2022年07月01日,對新標準的學習、理解與應用已經成為電梯行業所有從事電梯設計、制造、安裝、維修與檢測檢驗人員的必修課與當務之急。
對于“緊急操作裝置”這一重要的應急安全裝置,新標準的要求相較于舊標準的內容發生了很大的變化。新標準“緊急操作裝置”的要求不但更加具體、細化,而且增加了許多全新的要求。本文就新標準“電梯緊急操作裝置”的技術要求逐條逐句逐字、逐一詳細地做出了解讀,并歸納出4 種常見類型新標準“電梯緊急操作裝置”的使用條件及技術要求。同時,就“電梯緊急操作裝置”,對新舊標準每一條款的要求做了比較分析,以便讀者加深印象。
1 電梯曳引機制動器的安全打開(松閘)
執行緊急操作的第一步首先是將電梯曳引機[1]的制動器安全打開(松閘)。因此首先討論電梯曳引機制動器的安全打開(松閘)。GB/T 7588.1-2020 中條款5.9.2.2.2.7 對乘客電梯[2]和載貨電梯[2](以下簡稱為“電梯”)曳引機制動器的打開方法和方式等做出了新的要求和規定,即“應能采用持續手動操作的方法打開驅動主機制動器。該操作可通過機械(如杠桿)或由自動充電的緊急電源供電的電氣裝置進行”[3]。
1.1 曳引機制動器的打開方法
由上述條款5.9.2.2.2.7可見,電梯曳引機制動器的打開方法為“持續手動操作”。GB 7588-2003 +XG1-2015 中條款12.4.2.4對裝有手動緊急操作裝置的電梯曳引機制動器松開方法的要求與條款5.9.2.2.2.7是一致的,具體為“應能用手松開制動器并需要以一持續力保持其松開狀態”[4]。由上述條款5.9.2.2.2.7與條款12.4.2.4描述可見,電梯曳引機制動器的安全打開方法必須具備兩個條件:(1)手動操作;(2)持續手動操作力。這兩個前提條件缺一不可。
手動釋放制動器時,必須要求手動施加一個持續的力保持制動器的釋放狀態,當力失去時,制動器應能有效地制動電梯。這樣做的目的是為了防止在進行手動緊急操作時,由于轎廂及轎廂內載荷相對于對重[3]/平衡重[3]的質量差導致轎廂運行失去控制。這種情形對轎廂內人員和緊急操作人員都是相當危險的,很容易發生人身傷害事故,所以必須避免這種情形的出現。
1.2 電梯曳引機制動器的打開方式
同樣由上述條款5.9.2.2.2.7 可見,電梯曳引機制動器的打開方式只有以下兩種可選方式:(1)通過機械裝置(如杠桿)進行打開的方式;(2)由人員操作的電氣裝置進行打開的方式。
電氣裝置需由自動充電的緊急電源供電。條款5.9.2.2.2.7所述的“緊急電源供電的電氣裝置”是用于打開電梯驅動主機制動器使用的(松閘),而不是用于操作電梯曳引機機電式制動器[5]制動使用的(抱閘)。同時,電氣裝置需要通過一個自復位按鈕來控制,只有持續按壓按鈕才能使之動作,松開按鈕電氣裝置應立即停止工作。
GB 7588-2003 +XG1-2015 并沒有對電梯曳引機制動器的打開方式做出明確的規定。同時,GB/T 7588.1-2020 中條款5.9.2.2.2.7 較舊標準而言增加了以下3 個方面[6]的要求:(1)對自動充電的緊急電源增加了容量要求,即“應有足夠容量將轎廂移動到層站”;(2)增加了“手動釋放制動器失效不應導致制動器功能的失效”的要求;(3)增加了“應能從井道外獨立地測試每個制動組”的要求。
手動釋放是制動器的一個附加功能,當手動釋放失效時,制動器的制動能力應不受影響。簡言之,就是要求:即使手動釋放制動器的裝置失效,制動器的制動能力也不應受影響。
2 移動轎廂到附近層站
執行緊急操作的第二步是安全移動轎廂到附近的層站。接下來討論安全移動轎廂到附近層站的方式和轎廂載荷條件。GB/T 7588.1-2020中條款5.9.2.2.2.9 對于手動釋放制動器,將轎廂安全移動到附近層站的方式和移動的轎廂載荷條件做出了詳細的規定。GB 7588-2003 +XG1-2015 對將轎廂安全移動到附近層站的方式和移動的轎廂載荷條件無相應的條款要求。
2.1 移動轎廂到附近層站的方式
根據條款5.9.2.2.2.9的規定可知,將轎廂安全移動到附近層站的方式有兩種類型:(1)重力導致的自行移動;(2)手動操作。所謂“由重力導致[7]”就是依靠轎廂、對重兩邊的質量差克服系統阻力,從而使轎廂移動,就是通常所說的“松閘溜車”。
通常認為:

式中:W為對重裝置的總重量;G 為轎廂自重;q 為電梯平衡系數,表示由對重平衡額定載重量的量;Q 為電梯額定載重量。
手動操作又可以分為手動操作機械裝置和手動操作電動裝置。采用手動操作機械裝置的前提條件是該裝置應放置在救援現場,需要移動轎廂時能夠隨時獲取;手動操作電動裝置同樣也需要放置在救援現場,且必須由獨立于主電源的電源供電。“獨立于主電源供電[7]”是指該電氣裝置是由與主電源之間沒有電氣關聯的一組獨立電源供電,也就是需要備用電源供電。
2.2 移動轎廂到附近層站的載荷條件
同樣根據條款5.9.2.2.2.9 的規定可知,對于手動釋放制動器,移動的轎廂載荷條件為:(1)Q轎廂內載荷≤(q-0.1)Q;(2)Q ≥Q轎廂內載荷≥(q +0.1)Q。其中,q 為電梯平衡系數[8],取值范圍為0.4~0.5[9];Q為電梯額定載重量。
3 緊急操作裝置
電梯因突然停電或發生運行故障而停止運行時,轎廂有可能停在層站間距較大的相鄰兩層站之間,乘客會被困在轎廂中;電梯發生蹾底、沖頂等事故時,乘客同樣也會被困在轎廂中。緊急操作裝置[10]就是為了在上述情況發生時,使救援人員可通過非常規的操作(如在機房中進行緊急電動運行或手動松開驅動主機制動器并利用盤車手輪進行盤車等)將轎廂移動到就近平層位置,并將轎廂內被困乘客救援到安全的地方而專門設置的救援裝置。
緊急操作裝置可以分為4種類型:(1)重力導致的自行移動裝置;(2)手動操作機械裝置;(3)手動操作電動裝置;(4)緊急電動運行控制裝置。
3.1 手動操作機械裝置
GB/T 7588.1-2020中條款5.9.2.3.1.a)對手動操作機械裝置的使用前置條件和型式做出了明確規定。
3.1.1 手動操作機械裝置的使用前置條件
手動操作機械裝置的使用前提條件就是“使轎廂移動到層站所需的操作力不大于150 N”。
如果手動操作機械裝置是盤車手輪,那么150 N的力是指作用在盤車手輪外圓上的切向力,且其優先選用尺寸為320~400 mm[11]。緊急操作移動轎廂時一定存在往某個方向上移動轎廂所需的力較大,反之,往另一個方向上移動轎廂需要的力較小的情況。本條規定的“操作力不大于150 N”并沒有要求力的具體方向,也就是沒有要求較大的力不大于150 N。條款5.9.2.3.1.a)規定的“使轎廂移動到層站所需的操作力不大于150 N的手動操作機械裝置”,并不是要求在操作力不大于150 N的情況下,就必須設置手動操作機械裝置,也可以采取設置緊急電動運行控制裝置的方式來救援被困乘客。如果設置了緊急電動運行控制裝置就可以不設置手動操作機械裝置了。
3.1.2 手動操作機械裝置的型式
條款5.9.2.3.1a)1)對手動操作機械裝置的型式要求是“如果電梯的移動可能帶動該裝置則應是一個平滑且無輻條的輪子”。本條款暗示了“盤車手輪”只是手動操作機械裝置的型式之一,手動動操作機械裝置可以有其他的型式。例如放置在現場的重塊,通過將重塊置于轎頂或掛在補償鏈上的方式來移動轎廂。
GB 7588-2003 +XG1-2015中條款12.5.1要求“如果向上移動裝有額定載重量的轎廂所需的操作力不大于400 N,電梯驅動主機應裝設手動緊急操作裝置,以便借用平滑且無輻條的盤車手輪能將轎廂移動到一個層站。”由上述條款12.5.1 可知:(1)舊標準要求的手動操作機械裝置型式就是“盤車手輪”;(2)舊標準要求的手動操作機械裝置的操作力是不大于400 N;(3)舊標準要求的不大于400N 操作力是向上移動轎廂;(4)舊標準要求的不大于400 N操作力是向上移動額定載荷的工況。GB 7588-2003 +XG1-2015 對手動操作機械裝置以上的4點要求與GB/T 7588.1-2020的要求差異性非常之大。
3.2 手動操作電動裝置
GB/T 7588.1-2020中條款5.9.2.3.1b)對手動操作電動裝置的要求做出了明確規定。
3.2.1 手動操作電動裝置的要求
手動操作電動裝置的具體要求如下:(1)出現故障之后的1 h內,電源應可以使載有任何載荷的轎廂移動到附近的層站;(2)速度不大于0.30 m/s。GB 7588-2003 +XG1-2015 中沒有有關“手動操作電動裝置”的條款要求。
那么,以前常見的“電梯應急平層裝置(ARD)”是否就是新標準的“手動操作電動裝置”呢?答案是否定的。原因有以下3點。
(1)電梯應急平層裝置(ARD)可以在電網停電時,在設定的時間內自動投入工作,向電梯控制系統提供2 相應急電源,使電梯轎廂緩慢運行到平層位置并開門釋放乘客。電網電源正常時,ARD待機充電狀態;電網斷電后,ARD 自動進入逆變狀態,為電梯控制系統提供2相應急電源;電網電源恢復時,ARD恢復至待機充電狀態。當電梯主開關切斷主電源時,電梯應急平層裝置(ARD)同樣會在設定的時間內自動救援。以某一型號的電梯應急平層裝置(ARD)為例,其操作面板示意圖如圖1所示,接線原理如圖2所示。
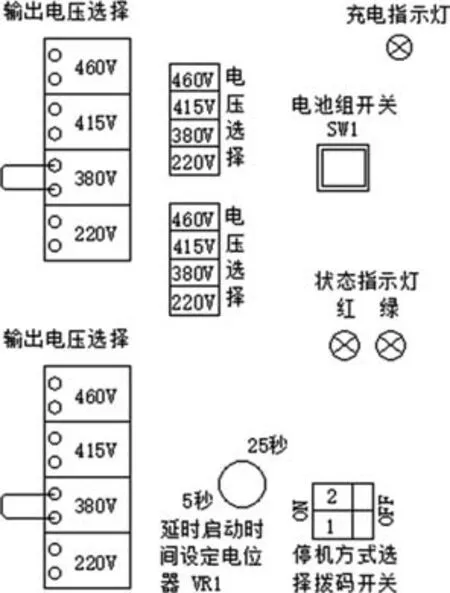
圖1 操作面板示意圖

圖2 ARD接線原理
(2)根據GB/T 7588.1-2020中條款5.10.5.5的規定“在主開關切斷電梯供電期間,應防止電梯的任何自動操作的運行(例如自動的電池供電運行)”可知,新標準要求在主開關斷開時,不允許電梯有任何自動操作的運行。
(3)電梯應急平層裝置(ARD)的供電電源就是電梯主電源;手動操作電動裝置要求獨立于主電源供電。
所以,基于以上3 點原因,以前的“電梯應急平層裝置(ARD)”不等同于新標準的“手動操作電動裝置”。
3.2.2 電梯自動救援操作裝置
電梯自動救援操作裝置執行標準為GB/T 40081-2021《電梯自動救援操作裝置》。其對“自動救援操作[12]”的定義為:“電梯供電電源故障或中斷時,自動使轎廂移動至預定層站,打開電梯轎門和層門,維持一定時間后關閉電梯轎門和層門的操作”。對“供電電源故障[12]”的定義為:“供電電源缺相或電壓異常而導致電梯意外停止運行的故障”。
GB/T 40081-2021《電梯自動救援操作裝置》中條款4.6.2.1.1規定“電梯供電電源故障導致電梯停止運行,電梯自動救援操作裝置應啟動自動救援操作”;條款4.6.2.1.2 規定“電梯供電電源中斷導致電梯停止運行,電梯自動救援操作裝置應啟動自動救援操作”;條款4.6.2.1.4 規定“電梯的主開關斷開時,電梯自動救援操作裝置不應啟動自動救援操作”。
由上述條款可見,電梯自動救援操作裝置只有在供電電源缺相、電壓異常或中斷時執行自動救援,但不包括主開關斷開的狀態。那么,電梯自動救援操作裝置符合為GB/T 40081-2021要求的“電梯自動救援操作裝置”是否就是“手動操作電動裝置”呢?本文認為獨立于主電源供電的“電梯自動救援操作裝置”就是“手動操作電動裝置”。
3.3 緊急電動運行控制裝置
GB/T 7588.1-2020中條款5.9.2.3.3對緊急電動運行控制裝置的使用前置條件做出了明確規定。
3.3.1 緊急電動運行控制裝置的使用前置條件
緊急電動運行控制裝置的使用前置條件具體如下:(1)如果向上移動載有額定載重量的轎廂所需的手動操作力大于400 N;(2)未設置條款5.9.2.3.1a)所規定的手動操作機械裝置。
那么,緊急電動運行控制裝置與手動操作電動裝置是否是同一個裝置呢?答案是否定的。依據GB/T 7588.1-2020 中條款5.12.1.6.1 的要求“根據5.9.2.3.3 的要求,如果需要緊急電動運行,應設置符合5.11.2 規定的緊急電動運行開關。驅動主機應由正常的主電源供電或由備用電源供電(如果有)”可見,緊急電動運行時不要求有二次電源(備用電源);而依據條款5.9.2.2.2.9b)2)的要求,手動操作電動裝置必須由放在現場的獨立于主電源的電源供電。因此可見,二者不是同一個裝置。
3.3.2 緊急電動運行開關的工作原理
GB/T 7588.1-2020中條款5.12.1.6.1d)對緊急電動運行開關的工作原理做出了明確規定,實際上就是將以下6 種類型電氣安全裝置旁路:(1)用于檢查繩或鏈松弛的電氣安全裝置;(2)轎廂安全鉗上的電氣安全裝置;(3)檢查超速的電氣安全裝置;(4)轎廂上行超速保護裝置上的電氣安全裝置;(5)緩沖器上的電氣安全裝置;(6)極限開關。
操作緊急電動運行控制裝置時,采用正常電源或備用電源(如果有)移動轎廂。緊急電動運行控制裝置設置在電梯機房中,是靠持續按壓按鈕來控制的,緊急電動運行可在電氣安全回路局部發生故障的情況(如限速器、安全鉗開關動作后)下進行。
3.4 轎廂在緊急操作情況下的操作關系
轎廂在緊急操作情況下的操作關系如圖3所示。

圖3 緊急救援操作關系
4 結束語
本文依據緊急操作過程的步驟分解,分別對緊急操作的第一步驟,即電梯曳引機制動器的松閘方法和方式(包含機械松閘、電氣裝置松閘兩種)以及其第二步驟,即移動轎廂到附近層站的載荷條件和移動方式(包含重力導致的自行移動、手動操作機械裝置的移動、手動操作電動裝置的移動)進行了詳細解析,進而引申出電梯緊急操作裝置的四種類型,即重力導致的自行移動裝置、手動操作機械裝置、手動操作電動裝置、緊急電動運行控制裝置。通過對以上緊急操作裝置四種類型的逐一解讀以及與舊標準的對比分析,可以使廣大讀者相對較容易掌握新標準GB/T 7588.1-2020《電梯制造與安裝安全規范 第1部分:乘客電梯和載貨電梯》要求下的緊急操作裝置的實質內涵,為電梯安全檢驗方面貢獻出自己份內的力量。
猜你喜歡
課堂內外(小學版)(2024年5期)2024-05-29 00:00:00
中國品牌(2019年10期)2019-10-15 05:57:12
故事大王(2018年3期)2018-05-03 09:55:52
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
知識就是力量(2017年9期)2017-10-13 23:35:31
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
紅蜻蜓·低年級(2015年11期)2015-04-29 00:00:00
小說月刊(2015年11期)2015-04-23 08:47:36
小說月刊(2015年4期)2015-04-18 13:55:18
發明與創新(2015年33期)2015-02-27 10:40:04
