緊急制動(dòng)工況下的縱向車(chē)速估計(jì)方法*
2022-10-11 07:44:38曾小華錢(qián)琦峰宋大鳳高皓銘吳佳俊
汽車(chē)工程 2022年9期
曾小華,錢(qián)琦峰,2,宋大鳳,高皓銘,2,吳佳俊
(1.吉林大學(xué),汽車(chē)仿真與控制國(guó)家重點(diǎn)實(shí)驗(yàn)室,長(zhǎng)春130000;2.吉林大學(xué)重慶研究院,重慶400000)
前言
車(chē)輛電子穩(wěn)定性控制系統(tǒng)通過(guò)滑移控制器調(diào)節(jié)車(chē)輪制動(dòng)力進(jìn)而修正失穩(wěn)狀態(tài),反映車(chē)輪關(guān)鍵狀態(tài)的滑移率計(jì)算依賴(lài)于縱向車(chē)速,其估計(jì)精度對(duì)控制效果起決定作用。駕駛?cè)嗽诰哂锌v向坡度和附著變化路面等復(fù)雜環(huán)境下的直線/轉(zhuǎn)向緊急制動(dòng)極易導(dǎo)致車(chē)輛失穩(wěn),如何保證在該工況下強(qiáng)魯棒性的縱向車(chē)速估計(jì)成為車(chē)輛動(dòng)力學(xué)控制的首要任務(wù)。
當(dāng)前常用的縱向車(chē)速估計(jì)方法主要基于非線性車(chē)輛或輪胎模型構(gòu)造狀態(tài)觀測(cè)器、基于傳感器信號(hào)多源信息融合,聯(lián)合動(dòng)力學(xué)模型與傳感器的濾波算法等。很多文獻(xiàn)通過(guò)汽車(chē)CAN總線或加速度傳感器對(duì)車(chē)速進(jìn)行推算,但縱向坡度會(huì)引入縱向加速度誤差。基于模型和信號(hào)聯(lián)合對(duì)車(chē)速估計(jì)的方法很多,例如無(wú)跡卡爾曼濾波、自適應(yīng)濾波、模糊系統(tǒng)和非線性參數(shù)時(shí)變觀測(cè)器等,但它們皆未考慮輪胎磨損、系統(tǒng)參數(shù)時(shí)變和受力環(huán)境未知且易突變等不確定因素。為提高估計(jì)算法的魯棒性,采用多個(gè)狀態(tài)聯(lián)合估計(jì)的方法,例如同時(shí)估計(jì)側(cè)向和縱向車(chē)速、道路附著系數(shù)和縱向車(chē)速聯(lián)合估計(jì)等。也有學(xué)者對(duì)特定場(chǎng)景進(jìn)行縱向車(chē)速估計(jì),例如制動(dòng)工況、低附著路面等。綜合上述研究,縱向車(chē)速估計(jì)方法基本上均基于動(dòng)力學(xué)模型和多維信息融合,然而在車(chē)輛失穩(wěn)的復(fù)雜工況下,信號(hào)來(lái)源和模型經(jīng)常受到干擾而無(wú)法準(zhǔn)確反映縱向車(chē)速信息,單一提高濾波算法的復(fù)雜度和參考的信息量不僅不能提高估計(jì)精度,反而影響控制系統(tǒng)的魯棒性。眾所周知,狀態(tài)估計(jì)是為控制算法服務(wù)的,估計(jì)算法作為控制算法的單向輸入,即控制算法的優(yōu)劣直接取決于狀態(tài)估計(jì)的準(zhǔn)確度。因此很多學(xué)者設(shè)計(jì)魯棒性強(qiáng)的抗干擾控制算法,以減少狀態(tài)估計(jì)誤差帶來(lái)的影響,但鮮有在設(shè)計(jì)控制邏輯時(shí)考慮狀態(tài)估計(jì)的計(jì)算需求。縱向參考車(chē)速在緊急制動(dòng)工況下難以準(zhǔn)確估計(jì),其難點(diǎn)在于4個(gè)車(chē)輪同時(shí)處于滑移狀態(tài),均無(wú)法從中提取縱向車(chē)速信息。本文中提出一種車(chē)輪滑移控制和縱向車(chē)速估計(jì)的聯(lián)合算法,打破現(xiàn)有狀態(tài)估計(jì)和控制單向參數(shù)傳遞的關(guān)系,在縱向估計(jì)算法設(shè)計(jì)時(shí)考慮對(duì)滑移控制算法結(jié)構(gòu)的影響,以便進(jìn)入特殊的控制期為縱向車(chē)速估計(jì)算法提供更好的估算環(huán)境。
基于上述設(shè)計(jì)思想,面對(duì)4個(gè)車(chē)輪均出現(xiàn)較大滑移不能反映車(chē)速的事實(shí),引入一種車(chē)速估計(jì)算法能直接影響車(chē)輪滑移控制邏輯的機(jī)制,通過(guò)不斷調(diào)整4個(gè)車(chē)輪的制動(dòng)力,保證4個(gè)車(chē)輪中始終存在一個(gè)車(chē)輪處于弱制動(dòng)力的控制狀態(tài),且在一定時(shí)間內(nèi)保持穩(wěn)定,允許該車(chē)輪的滑移率不完全跟隨目標(biāo)滑移率,并讓該車(chē)輪的制動(dòng)力系數(shù)與滑移率處于線性區(qū),進(jìn)而間接基于該車(chē)輪的轉(zhuǎn)速推導(dǎo)出縱向車(chē)速。為減小該機(jī)制引起的制動(dòng)效能衰退,提出車(chē)輪優(yōu)選邏輯,根據(jù)時(shí)間周期和車(chē)輪狀態(tài)靈活更換車(chē)輪。從改變滑移控制策略的角度解決了在緊急制動(dòng)情況下縱向車(chē)速估計(jì)的難題。
1 縱向車(chē)速估計(jì)整體實(shí)施方案
縱向車(chē)速估計(jì)整體實(shí)現(xiàn)方案如圖1所示。從車(chē)輪原始的轉(zhuǎn)速入手,根據(jù)制動(dòng)力系數(shù)與滑移率的關(guān)系,校正輪胎滑移率對(duì)縱向速度的影響,得到輪心速度。根據(jù)剛體運(yùn)動(dòng)轉(zhuǎn)換,結(jié)合橫擺角速度和轉(zhuǎn)向盤(pán)轉(zhuǎn)角等信息,將輪心速度轉(zhuǎn)換到質(zhì)心處。然后基于模糊系統(tǒng)計(jì)算4個(gè)車(chē)輪的置信度,并將轉(zhuǎn)換到質(zhì)心的4個(gè)輪速加權(quán),作為縱向車(chē)速的測(cè)量值。
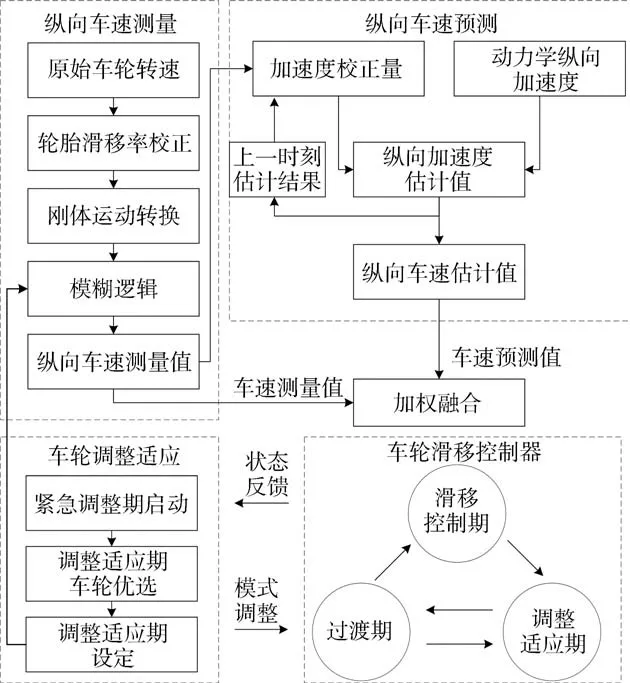
圖1 縱向車(chē)速估計(jì)整體實(shí)現(xiàn)方案
在緊急制動(dòng)工況下引入一種特殊滑移控制狀態(tài),該狀態(tài)用于調(diào)整車(chē)輪制動(dòng)力以?xún)?yōu)化輪速變化,并將該狀態(tài)稱(chēng)為調(diào)整適應(yīng)期,車(chē)輪進(jìn)入和退出該狀態(tài)須經(jīng)過(guò)一系列的判斷、優(yōu)選、設(shè)定流程,且能影響模糊邏輯,并提高處于調(diào)整適應(yīng)期車(chē)輪的置信度。為增強(qiáng)估計(jì)算法魯棒性,利用輪胎制動(dòng)力計(jì)算車(chē)輛的縱向加速度,并基于縱向車(chē)速測(cè)量值對(duì)其校正,然后經(jīng)過(guò)縱向加速度一步預(yù)測(cè)得到縱向車(chē)速的預(yù)測(cè)值。最終根據(jù)車(chē)速預(yù)測(cè)值和測(cè)量值加權(quán),得到最終的縱向車(chē)速估計(jì)結(jié)果。
2 縱向車(chē)速估計(jì)算法
2.1 輪速加權(quán)融合計(jì)算縱向車(chē)速測(cè)量值
車(chē)輪制動(dòng)時(shí)由式(1)輪胎滑移率計(jì)算式可得到車(chē)輪轉(zhuǎn)速與輪心縱向速度的關(guān)系。在緊急制動(dòng)過(guò)程中車(chē)輪制動(dòng)力與滑移率的關(guān)系會(huì)表現(xiàn)出高度非線性,進(jìn)而觸發(fā)車(chē)輪滑移控制器。當(dāng)車(chē)輪受到的制動(dòng)力較小時(shí),可假設(shè)在緊急制動(dòng)過(guò)程中輪胎縱向制動(dòng)力系數(shù)與滑移率保持線性關(guān)系,如式(2)所示。受到大制動(dòng)力的車(chē)輪將不再滿(mǎn)足該假設(shè),根據(jù)式(2)算得的結(jié)果不可信,不過(guò)考慮到輪胎非線性關(guān)系變化復(fù)雜且不利于在線實(shí)時(shí)計(jì)算,仍采用式(2)計(jì)算,但會(huì)在下文設(shè)計(jì)的模糊系統(tǒng)中降低車(chē)輪的置信度。輪胎縱向制動(dòng)力系數(shù)計(jì)算如式(3)所示。

式中:s為輪胎滑移率;為車(chē)輪轉(zhuǎn)速;為車(chē)輪半徑;為輪心處的縱向線速度,=1,2,3,4,分別代表前左輪、前右輪、后左輪、后右輪;為方便描述,下文所有帶下角標(biāo)的變量均指不同車(chē)輪,而不帶下角標(biāo)的所屬車(chē)輪變量默認(rèn)對(duì)4個(gè)車(chē)輪均適用。

式中:為制動(dòng)力系數(shù);為輪胎制動(dòng)力系數(shù)與滑移率線性關(guān)系區(qū)的比例系數(shù)。

式中:為車(chē)輪受到車(chē)輪坐標(biāo)系的縱向制動(dòng)力;為車(chē)輪垂向載荷;為靜態(tài)車(chē)輪垂向載荷;為加權(quán)系數(shù),以減小車(chē)輪垂向力估計(jì)誤差帶來(lái)的影響。
在、、已知的條件下,根據(jù)式(1)和式(2)可以得到車(chē)輪轉(zhuǎn)速與其縱向線速度的轉(zhuǎn)換關(guān)系為

車(chē)輛在直線行駛工況且滿(mǎn)足式(2)的條件下,等于縱向車(chē)速,而在轉(zhuǎn)向工況下須基于剛體運(yùn)動(dòng)轉(zhuǎn)換關(guān)系推算輪心縱向線速度與車(chē)輛質(zhì)心線速度之間的關(guān)系。圖2為車(chē)體運(yùn)動(dòng)學(xué)示意圖。圖中和分別為輪心線速度在車(chē)輪坐標(biāo)系中的橫向和縱向分量,和分別為輪心線速度在車(chē)輛本體坐標(biāo)系中的橫向和縱向分量,δ為車(chē)輪轉(zhuǎn)向角。
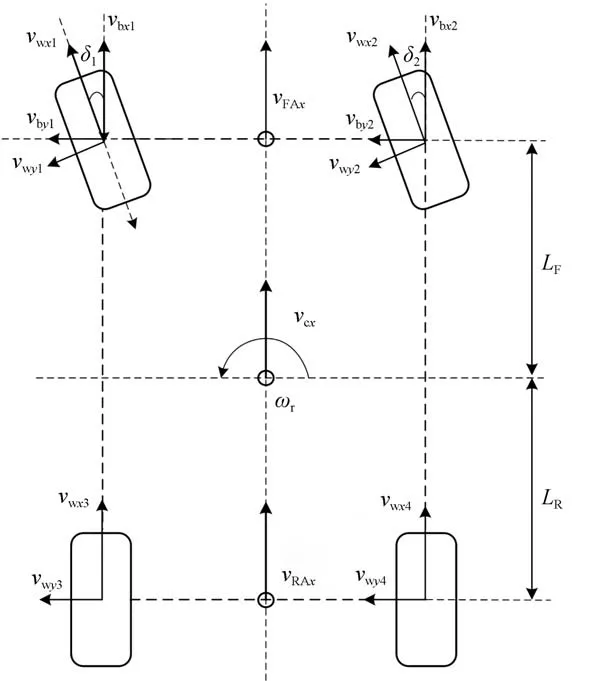
圖2 車(chē)體運(yùn)動(dòng)學(xué)關(guān)系
為將輪心縱向線速度轉(zhuǎn)換到質(zhì)心處,首先須將車(chē)輪坐標(biāo)系轉(zhuǎn)換到車(chē)輛本體坐標(biāo)系,然后在本體坐標(biāo)系中根據(jù)剛體上點(diǎn)的運(yùn)動(dòng)關(guān)系換算到質(zhì)心處。以左前輪為例,輪心速度分別向車(chē)輪和車(chē)輛本體兩個(gè)坐標(biāo)系橫縱坐標(biāo)分解,其中車(chē)輪坐標(biāo)系中的縱向速度可通過(guò)車(chē)輛本體坐標(biāo)系中的橫縱速度表示:

由于質(zhì)心處縱向速度與前后軸中心處的縱向車(chē)速均在車(chē)輛本體坐標(biāo)系下且方向一致,因此三者完全相同,即

式中、和分別為前軸中心點(diǎn)、后軸中心點(diǎn)和質(zhì)心處的縱向速度。
由于后軸車(chē)輪不轉(zhuǎn)向,因此后軸的車(chē)輪坐標(biāo)系與車(chē)輛本體坐標(biāo)系方向一致,假設(shè)車(chē)輛后軸不發(fā)生較大側(cè)滑,則可認(rèn)為后軸兩車(chē)輪的輪心處橫向速度為零。考慮到橫擺角速度的影響,在車(chē)輛本體坐標(biāo)系中,由剛體運(yùn)動(dòng)轉(zhuǎn)換可得輪心橫向速度:

式中:為軸距;為質(zhì)心到前軸距離;為質(zhì)心到后軸距離;為車(chē)輛本體橫擺角速度。
前軸中心點(diǎn)縱向速度與輪心縱向速度關(guān)系為

式中為輪距。
根據(jù)相同的轉(zhuǎn)換方法分別對(duì)右前輪、左后輪、右后輪進(jìn)行分析,得出相似的轉(zhuǎn)換關(guān)系。
綜合式(5)~式(8),可以推導(dǎo)出4個(gè)車(chē)輪在車(chē)輪坐標(biāo)系中的輪心縱向速度到質(zhì)心處的轉(zhuǎn)換關(guān)系:

式中'(=1,2,3,4)為轉(zhuǎn)換到質(zhì)心處的車(chē)輪速度。
至此,聯(lián)合式(3)、式(4)、式(9)~式(12),即可將車(chē)輪原始轉(zhuǎn)速轉(zhuǎn)換到車(chē)輛質(zhì)心處。在滿(mǎn)足上述假設(shè)條件下,每個(gè)車(chē)輪轉(zhuǎn)換后的結(jié)果均能得到縱向車(chē)速。然而輪速信號(hào)受到干擾、參數(shù)不準(zhǔn)確、假設(shè)不合理等問(wèn)題均會(huì)導(dǎo)致輪心線速度與縱向車(chē)速之間存在較大偏差。因此須根據(jù)車(chē)輛狀態(tài)和輪速的關(guān)系進(jìn)行模糊邏輯處理,可得4個(gè)車(chē)輪對(duì)縱向車(chē)速的置信度,然后將置信度作為權(quán)重系數(shù)對(duì)4個(gè)車(chē)輪轉(zhuǎn)換后的質(zhì)心處縱向速度進(jìn)行加權(quán)融合。
目前基于模糊邏輯系統(tǒng)計(jì)算輪速置信度的文獻(xiàn)較多,一般可參考'、?'('的變化率)和輪胎受力等信息,計(jì)算每個(gè)車(chē)輪的置信度,具體信息的輸入如下:
(1)'、?'和?'(?'的變化率);
(2)4個(gè)車(chē)輪'之間的差異和相對(duì)大小;
(3)4個(gè)車(chē)輪?'之間的差異和相對(duì)大小;
(4)'與縱向車(chē)速估計(jì)值之間的差異;
(5)車(chē)輪的縱向力和垂向力。
普遍認(rèn)為在緊急制動(dòng)工況下適合估算車(chē)速的信號(hào)狀態(tài)表征總結(jié)如下:
(1)?'的絕對(duì)值較小;
(2)4個(gè)車(chē)輪?'的最大值與最小值相差較小(同時(shí)針對(duì)4個(gè)車(chē)輪);
(3)?'與車(chē)輛估計(jì)的縱向加速度較接近;
(4)?'較小時(shí),縱向力也較小,且'和車(chē)速估計(jì)值接近。
關(guān)于模糊邏輯構(gòu)造的文獻(xiàn)較多,本文主要采用文獻(xiàn)[8]中的模糊邏輯構(gòu)建方法,具體細(xì)節(jié)不在此贅述。得到每個(gè)車(chē)輪置信度后對(duì)'加權(quán)處理,得到的縱向車(chē)速測(cè)量值為

式中f為車(chē)輪的加權(quán)系數(shù),由模糊邏輯計(jì)算得到,代表每個(gè)車(chē)輪的置信度。
在緊急制動(dòng)情況下4個(gè)車(chē)輪均出現(xiàn)較大滑移,得到的置信度均較小,導(dǎo)致最終結(jié)果'不可信。為應(yīng)對(duì)上述情況,在2.3節(jié)中將聯(lián)合車(chē)輪滑移控制器,在車(chē)輪防抱死基礎(chǔ)上,對(duì)車(chē)輪制動(dòng)力進(jìn)行調(diào)整,使4個(gè)車(chē)輪中始終存在一個(gè)處于小滑移或弱制動(dòng)的優(yōu)選車(chē)輪,避免4個(gè)車(chē)輪在緊急制動(dòng)情況下均處于動(dòng)力學(xué)關(guān)系復(fù)雜的非線性區(qū),基于上述模糊邏輯計(jì)算得到優(yōu)選車(chē)輪的置信度將會(huì)增大。為提高算法的魯棒性,應(yīng)對(duì)輪速信號(hào)存在錯(cuò)誤等情況,在2.2節(jié)中基于動(dòng)力學(xué)模型估計(jì)質(zhì)心處的縱向加速度,進(jìn)而對(duì)車(chē)速進(jìn)行預(yù)測(cè)。
2.2 基于動(dòng)力學(xué)模型計(jì)算縱向車(chē)速預(yù)測(cè)值
動(dòng)力學(xué)模型需要車(chē)輪縱向和側(cè)向輪胎力作為輸入來(lái)計(jì)算縱向加速度。由于輪胎受力情況難以準(zhǔn)確估計(jì),所以為提高縱向車(chē)速估算的魯棒性,盡可能減少對(duì)輪胎力的依賴(lài),由此保證車(chē)輛在任何工況下都能準(zhǔn)確估計(jì)縱向車(chē)速。
首先假設(shè)前軸兩車(chē)輪轉(zhuǎn)向角相同,即

式中為前軸兩車(chē)輪轉(zhuǎn)向角的均值。
圖3為車(chē)輛受力分析,根據(jù)車(chē)輛在縱向方向的合力計(jì)算縱向加速度,縱向合力和加速度分別為
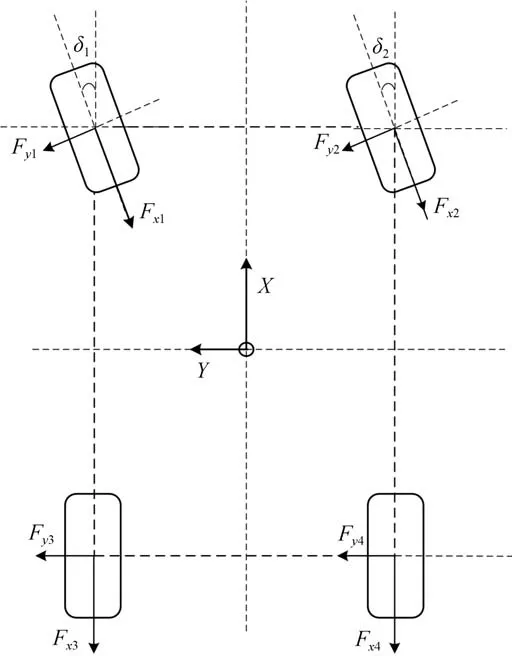
圖3 車(chē)輛受力分析示意
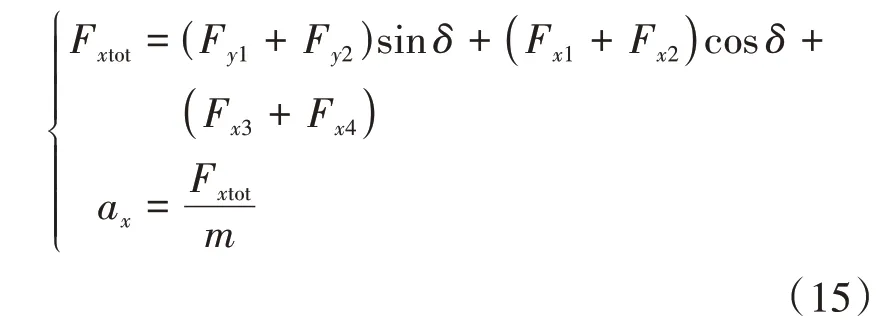
式中:F為車(chē)輛受到的縱向合力;F和F分別為車(chē)輪受到的縱向制動(dòng)力和側(cè)向力;為整車(chē)質(zhì)量;a為縱向加速度。
由式(15)可以看出,前軸轉(zhuǎn)向在縱向加速度計(jì)算中引入車(chē)輪側(cè)向力,為避免側(cè)向力估計(jì)精度差帶來(lái)的誤差,須盡可能消除側(cè)向力的引入。
車(chē)輛側(cè)向受力平衡式為

車(chē)輛橫擺受力平衡式為
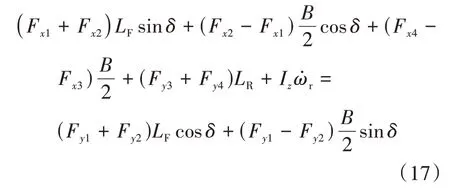
式中:a為側(cè)向加速度;I為橫擺轉(zhuǎn)動(dòng)慣量。
由于轉(zhuǎn)向角較小,且前輪側(cè)向力基本一致,為盡可能消除側(cè)向力的引入,對(duì)式(17)中的側(cè)向力之差項(xiàng)簡(jiǎn)化為

利用式(18)簡(jiǎn)化式(17),可得前輪轉(zhuǎn)向產(chǎn)生的側(cè)向合力為
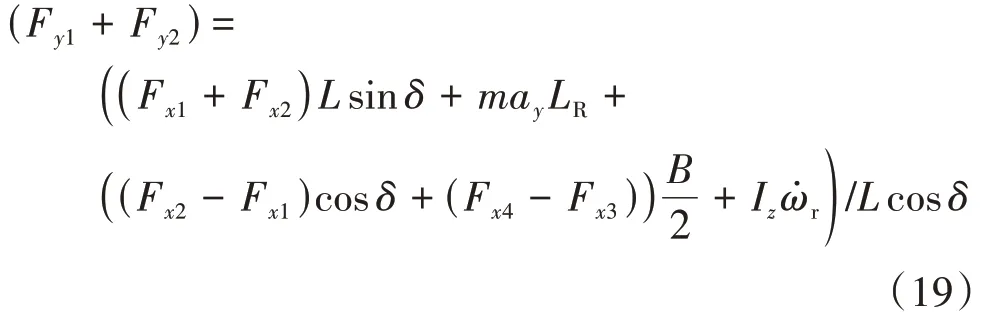
綜合式(15)和式(19),計(jì)算縱向加速度僅依靠前后軸車(chē)輪制動(dòng)力之和與之差、側(cè)向加速度、前輪轉(zhuǎn)角和橫擺角速度變化率,而不必引入輪胎側(cè)向力,并用計(jì)算得到的縱向加速度對(duì)車(chē)速進(jìn)行一步預(yù)測(cè)。
2.3 面向縱向車(chē)速估計(jì)的車(chē)輪滑移控制設(shè)計(jì)
一般滑移控制器將車(chē)輪的滑移率控制在目標(biāo)滑移率附近,雖然達(dá)到了車(chē)輪防抱死時(shí)滑移率已較小的效果,但車(chē)輪只要有滑移,'就不可信,制動(dòng)力估計(jì)精度變差,直接影響基于動(dòng)力學(xué)模型所計(jì)算的加速度。由于滑移控制器作用時(shí)輪胎處于非線性工作區(qū),故采用基于模型的濾波方法難以描述其動(dòng)力學(xué)特性,且受到車(chē)載控制器的計(jì)算能力和參數(shù)時(shí)變影響,導(dǎo)致電子穩(wěn)定性控制系統(tǒng)難以精確調(diào)整車(chē)輛狀態(tài)。為從根本上解決該問(wèn)題,須從車(chē)輪滑移調(diào)整的角度出發(fā),在正常滑移控制的基礎(chǔ)上,引入一種專(zhuān)門(mén)用于縱向車(chē)速估計(jì)而設(shè)計(jì)的滑移控制模式,并將該模式簡(jiǎn)稱(chēng)為“調(diào)整適應(yīng)期”。在該模式下,車(chē)輪受到穩(wěn)定的弱制動(dòng)力,且允許不跟隨目標(biāo)滑移率,以提高車(chē)輪在模糊邏輯系統(tǒng)中的置信度。
2.3.1 調(diào)整適應(yīng)期車(chē)輪優(yōu)選
調(diào)整適應(yīng)期車(chē)輪優(yōu)選流程如圖4所示。在滑移控制器中引入調(diào)整適應(yīng)期是為解決緊急制動(dòng)所導(dǎo)致的縱向車(chē)速估計(jì)困難,而在非必要條件下滑移控制器進(jìn)入調(diào)整適應(yīng)期反而會(huì)造成制動(dòng)不足,因此應(yīng)在4個(gè)車(chē)輪全處于防抱死滑移控制狀態(tài)下才能允許車(chē)輪優(yōu)選。在需要車(chē)輪進(jìn)入調(diào)整適應(yīng)狀態(tài)后,進(jìn)入調(diào)整適應(yīng)期的車(chē)輪由于不再跟隨滑移控制設(shè)定的目標(biāo)滑移率,可能出現(xiàn)制動(dòng)力不足、制動(dòng)跑偏等影響整車(chē)制動(dòng)性能的問(wèn)題。因此調(diào)整適應(yīng)期內(nèi)的車(chē)輪不僅能夠利用其轉(zhuǎn)速間接推導(dǎo)出縱向車(chē)速,且還要盡可能降低所造成的影響。4個(gè)車(chē)輪中僅需其中一個(gè)車(chē)輪進(jìn)入調(diào)整適應(yīng)期即可滿(mǎn)足縱向車(chē)速估計(jì),因此須對(duì)車(chē)輪優(yōu)先級(jí)排序。為應(yīng)對(duì)優(yōu)選車(chē)輪突發(fā)狀態(tài)變化和長(zhǎng)時(shí)間制動(dòng)力不足導(dǎo)致制動(dòng)不足等問(wèn)題,須判斷優(yōu)選車(chē)輪是否退出調(diào)整適應(yīng)狀態(tài),并選擇其他車(chē)輪作為優(yōu)選對(duì)象,最終得到的優(yōu)選車(chē)輪進(jìn)入調(diào)整適應(yīng)期。
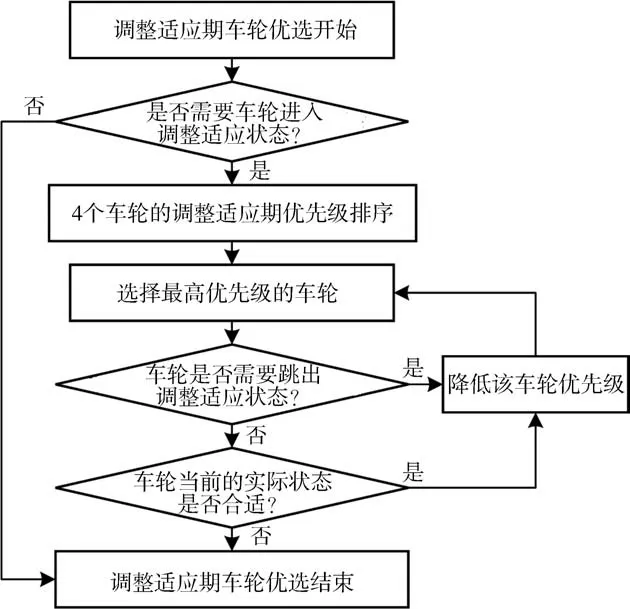
圖4 調(diào)整適應(yīng)期優(yōu)選流程
根據(jù)調(diào)整適應(yīng)期內(nèi)的車(chē)輪處于弱制動(dòng)力、平穩(wěn)自由旋轉(zhuǎn)等期望狀態(tài),適合進(jìn)入該狀態(tài)的車(chē)輪應(yīng)滿(mǎn)足以下要求:
(1)輪胎垂向力較小且較為穩(wěn)定,在穩(wěn)定的弱制動(dòng)情況下可跟隨車(chē)身位移而轉(zhuǎn)動(dòng);
(2)滑移率較小,不傾向于滑移;
(3)目標(biāo)滑移率較小,即車(chē)輪期望制動(dòng)力較小,相比其他車(chē)輪提供的制動(dòng)力較小;
(4)轉(zhuǎn)速變化率穩(wěn)定,振動(dòng)幅度小。
基于上述調(diào)整適應(yīng)期內(nèi)的車(chē)輪要求,應(yīng)在不同道路和駕駛員輸入條件下,對(duì)4個(gè)車(chē)輪進(jìn)行優(yōu)先級(jí)排序。由于制動(dòng)工況軸荷向前轉(zhuǎn)移,一般前輪需要提供的制動(dòng)力較大,因此后軸車(chē)輪優(yōu)先級(jí)較高。排序方式分以下4種情況。
(1)兩側(cè)附著不同的路面下,低附著一側(cè)車(chē)輪制動(dòng)力較低,若進(jìn)一步降低車(chē)輪制動(dòng)力,會(huì)導(dǎo)致車(chē)輛向高附著一側(cè)偏轉(zhuǎn)。因后軸低附著一側(cè)車(chē)輪存在抱死傾向,故優(yōu)先級(jí)最高的車(chē)輪為高附著一側(cè)的后輪,其次是低附著一側(cè)的前輪,然后是低附著一側(cè)的后輪。
(2)轉(zhuǎn)向工況下,因軸荷向外側(cè)車(chē)輪轉(zhuǎn)移,故該側(cè)須提供大制動(dòng)力,因此可將轉(zhuǎn)向工況的優(yōu)先級(jí)確定方法類(lèi)比兩側(cè)附著不同的路面。
(3)直行工況下,根據(jù)輪速信號(hào)的可信度大小,并參考后軸車(chē)輪的優(yōu)先級(jí)高于前軸車(chē)輪的方式排序。
(4)不同附著對(duì)接路面下,由低附著進(jìn)入高附著路面時(shí),高附著車(chē)輪須增大制動(dòng)力以避免制動(dòng)不足,因此前軸不允許作為優(yōu)選車(chē)輪。且前軸附著變化時(shí)后軸緊跟著進(jìn)入到附著變化,因此也須禁止后軸進(jìn)入調(diào)整適應(yīng)期。在這種情況下4個(gè)車(chē)輪無(wú)優(yōu)先級(jí)。
在4個(gè)車(chē)輪優(yōu)先級(jí)確定后,選擇優(yōu)先級(jí)最大的作為優(yōu)選車(chē)輪,若該車(chē)輪上個(gè)周期已處于調(diào)整適應(yīng)期且超過(guò)了該狀態(tài)期的最大允許時(shí)間后,則應(yīng)使車(chē)輪正常跳出調(diào)整適應(yīng)狀態(tài)。若路面復(fù)雜變化等情況使最高優(yōu)先級(jí)的車(chē)輪狀態(tài)處于側(cè)向穩(wěn)定控制介入、車(chē)輪存在較大滑移或脫離地面等失穩(wěn)狀態(tài),以及所有車(chē)輪都在小滑移狀態(tài)或駕駛員不再制動(dòng)而不必要進(jìn)行優(yōu)選等條件時(shí),最高優(yōu)先級(jí)車(chē)輪不再合適進(jìn)入調(diào)整適應(yīng)期。最高優(yōu)先級(jí)車(chē)輪正常跳出或禁止進(jìn)入調(diào)整適應(yīng)期時(shí),須降低該車(chē)輪的優(yōu)先級(jí)并對(duì)下一優(yōu)先級(jí)車(chē)輪重復(fù)上述判斷。若4個(gè)車(chē)輪均沒(méi)有被選中進(jìn)入調(diào)整適應(yīng)期,則該控制周期內(nèi)調(diào)整適應(yīng)期優(yōu)選過(guò)程也要結(jié)束,該周期內(nèi)每個(gè)車(chē)輪的滑移控制器均處于正常滑移控制狀態(tài)。
2.3.2 滑移控制器設(shè)計(jì)
經(jīng)過(guò)調(diào)整適應(yīng)期優(yōu)選的車(chē)輪在其滑移控制過(guò)程中應(yīng)轉(zhuǎn)入調(diào)整適應(yīng)狀態(tài),并進(jìn)行弱制動(dòng)力控制。為避免車(chē)輪在調(diào)整適應(yīng)狀態(tài)和正常滑移控制狀態(tài)之間切換時(shí)過(guò)大的制動(dòng)轉(zhuǎn)矩變化而導(dǎo)致車(chē)輪振動(dòng)或整車(chē)沖擊,引入“調(diào)整過(guò)渡”狀態(tài),用于協(xié)調(diào)狀態(tài)轉(zhuǎn)移過(guò)程。因此每個(gè)車(chē)輪的滑移控制器應(yīng)包含正常滑移控制、調(diào)整過(guò)渡和調(diào)整自適應(yīng)3種狀態(tài)。圖5為直行緊急制動(dòng)時(shí)每個(gè)車(chē)輪的滑移控制器所處狀態(tài)變化的示例。由圖可見(jiàn),在每個(gè)狀態(tài)階段下,存在車(chē)輪進(jìn)入調(diào)整適應(yīng)期,并在調(diào)整適應(yīng)期結(jié)束后緊接著進(jìn)入調(diào)整過(guò)渡期,且另外一個(gè)車(chē)輪會(huì)隨之進(jìn)入調(diào)整適應(yīng)期。
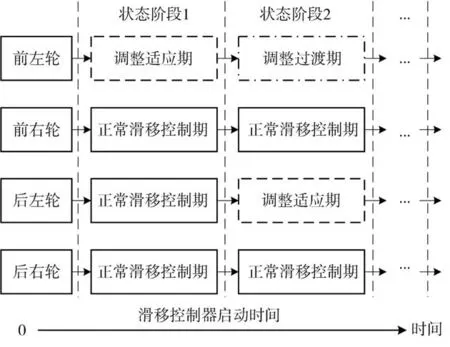
圖5 每個(gè)車(chē)輪的滑移控制器狀態(tài)變化示意
鑒于本文主要內(nèi)容為縱向車(chē)速估計(jì),對(duì)車(chē)輪滑移控制器內(nèi)部算法和原理等具體設(shè)計(jì)內(nèi)容不做詳細(xì)展開(kāi),在每個(gè)車(chē)輪滑移控制器的每個(gè)狀態(tài)下均采用可變系數(shù)的“前饋+比例項(xiàng)反饋”控制算法為基礎(chǔ),然后根據(jù)3種狀態(tài)進(jìn)行適當(dāng)調(diào)整。
滑移控制器的控制偏差為實(shí)際滑移率與期望滑移率的差,即

式中:為滑移率;為期望滑移率;為滑移控制器的滑移控制偏差。
車(chē)輪滑移控制器在正常滑移控制狀態(tài)下,期望制動(dòng)轉(zhuǎn)矩為上個(gè)控制周期估算的車(chē)輪制動(dòng)轉(zhuǎn)矩與誤差比例項(xiàng)之和,即
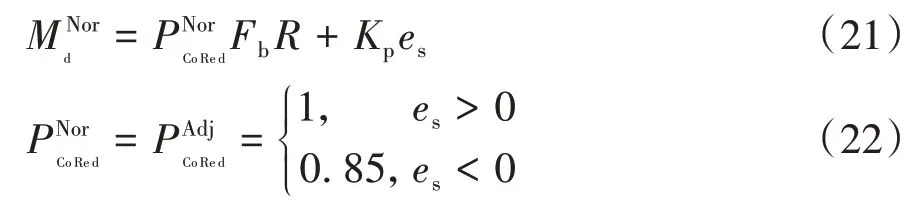

車(chē)輪滑移控制器在調(diào)整適應(yīng)狀態(tài)時(shí),車(chē)輪實(shí)際滑移無(wú)需跟隨目標(biāo)滑移率,為盡快降低車(chē)輪目標(biāo)制動(dòng)力且保持穩(wěn)定的弱制動(dòng)力,須快速衰減前饋?lái)?xiàng),同時(shí)屏蔽比例項(xiàng)所產(chǎn)生的期望制動(dòng)轉(zhuǎn)矩變化,但當(dāng)滑移較大時(shí)應(yīng)啟用比例控制以快速降低期望制動(dòng)轉(zhuǎn)矩,即


車(chē)輪滑移控制器在調(diào)整過(guò)渡狀態(tài)時(shí),須將調(diào)整適應(yīng)狀態(tài)下的轉(zhuǎn)矩值過(guò)渡到正常滑移控制狀態(tài)下,同時(shí)還受比例項(xiàng)的影響,即


2.4 基于加權(quán)融合的縱向車(chē)速估計(jì)
由2.1節(jié)和2.3節(jié)可知,4個(gè)車(chē)輪進(jìn)入防抱死滑移控制時(shí)將會(huì)觸發(fā)車(chē)輪優(yōu)選邏輯,并挑選出適合進(jìn)入調(diào)整適應(yīng)期的車(chē)輪,由于在調(diào)整適應(yīng)期內(nèi)車(chē)輪受到制動(dòng)力較小,能夠跟隨整車(chē)的平動(dòng)而接近自由旋轉(zhuǎn),基于2.1節(jié)中模糊邏輯系統(tǒng)計(jì)算的置信度遠(yuǎn)大于其余3個(gè)車(chē)輪,進(jìn)而采用式(13)加權(quán)得到的縱向車(chē)速結(jié)果比較可信。為減小2.2節(jié)中制動(dòng)力估計(jì)誤差對(duì)縱向加速度的影響,計(jì)算縱向加速度的偏置和校正后的縱向加速度,分別如式(25)和式(26)所示。然后根據(jù)校正后的縱向加速度進(jìn)行一步預(yù)測(cè),如式(27)所示,最后將縱向速度的測(cè)量值和預(yù)測(cè)值加權(quán)融合,如式(28)所示。

式中:()為第周期的加速度偏置值;為加權(quán)系數(shù),用來(lái)對(duì)()平滑濾波;()為第周期的縱向車(chē)速預(yù)測(cè)值;'()為第周期的縱向車(chē)速測(cè)量值。

式中:為加速度的偏置值;?為校正后的縱向加速度。

式中:為每個(gè)估計(jì)周期的時(shí)間步長(zhǎng);?(-1)為第-1周期的縱向速度估計(jì)值。

式中K為縱向車(chē)速估計(jì)的加權(quán)系數(shù)。
需要說(shuō)明的是,加權(quán)融合的縱向車(chē)速估計(jì)類(lèi)似卡爾曼濾波算法的設(shè)計(jì)思想,即根據(jù)式(13)和式(27)分別得到縱向車(chē)速的測(cè)量值和預(yù)測(cè)值,并利用式(28)對(duì)兩者加權(quán)融合。但由于上述的計(jì)算過(guò)程不嚴(yán)格滿(mǎn)足卡爾曼濾波算法的理論假設(shè)和推導(dǎo)過(guò)程,因此加權(quán)系數(shù)K根據(jù)經(jīng)驗(yàn)給定。
3 估計(jì)算法測(cè)試
3.1 測(cè)試環(huán)境
圖6為縱向車(chē)速估計(jì)的算法測(cè)試環(huán)境,基于MATLAB/Simulink仿真平臺(tái),將被控對(duì)象模型和縱向車(chē)速估計(jì)算法進(jìn)行集成,被控對(duì)象包括CarSim車(chē)輛動(dòng)力學(xué)模型和AMESim液壓閥組模型,兩者均通過(guò)自帶的聯(lián)合仿真S函數(shù)與Simulink進(jìn)行交互;為便于控制器的編譯和定標(biāo),縱向車(chē)速估計(jì)算法的實(shí)現(xiàn)方式為嵌入式C語(yǔ)言,利用Visual Studio建立算法運(yùn)行環(huán)境,基于共享內(nèi)存技術(shù),將集成后的被控對(duì)象模型與車(chē)速估計(jì)算法聯(lián)合仿真,在離線條件分別為高/低附著直行緊急制動(dòng)工況和高/低附著換道并緊急制動(dòng)工況下對(duì)縱向車(chē)速估計(jì)算法的精度和具有調(diào)整適應(yīng)期的滑移控制器的制動(dòng)性能進(jìn)行測(cè)試。工況和預(yù)瞄駕駛員模型均直接在CarSim中設(shè)定,其中高附和低附路面的附著系數(shù)分別為0.9和0.3,期望滑移率分別為0.07和0.04。輪胎模型采用CarSim內(nèi)部的查表模型,在2.1節(jié)中所用到的輪胎半徑、輪胎制動(dòng)力系數(shù)和滑移率線性關(guān)系的比例系數(shù)與輪胎模型盡量保持一致。在2.2節(jié)中計(jì)算縱向加速度所需的車(chē)輪縱向制動(dòng)力,根據(jù)AMESim液壓閥組模型的輪缸壓力計(jì)算得到。換道為雙移線工況,駕駛員模型預(yù)瞄時(shí)間為1 s。在離線仿真環(huán)境下充分對(duì)算法驗(yàn)證測(cè)試后,搭建硬件在環(huán)仿真平臺(tái),利用真實(shí)控制器對(duì)算法的實(shí)時(shí)性和有效性進(jìn)行驗(yàn)證;在實(shí)際駕駛輸入條件下,利用CarSim提供的虛擬場(chǎng)景進(jìn)行駕駛員閉環(huán)測(cè)試。
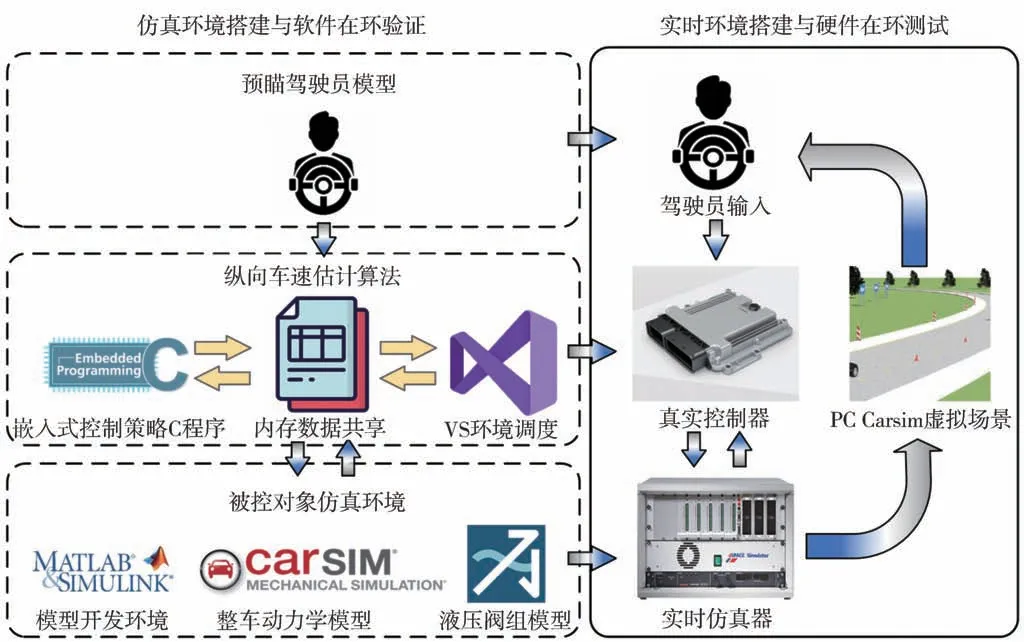
圖6 算法測(cè)試環(huán)境
在所有測(cè)試工況下,選取車(chē)輛初速度為80 km/h,且初始狀態(tài)為自由滑行,并在2 s時(shí)刻緊急制動(dòng),即CarSim中駕駛員模型操縱主缸壓力在仿真時(shí)間為2 s時(shí)階躍到4 MPa,直到車(chē)輛停車(chē)為止。車(chē)輛主要參數(shù)如表1所示。控制器主要參數(shù)如表2所示。
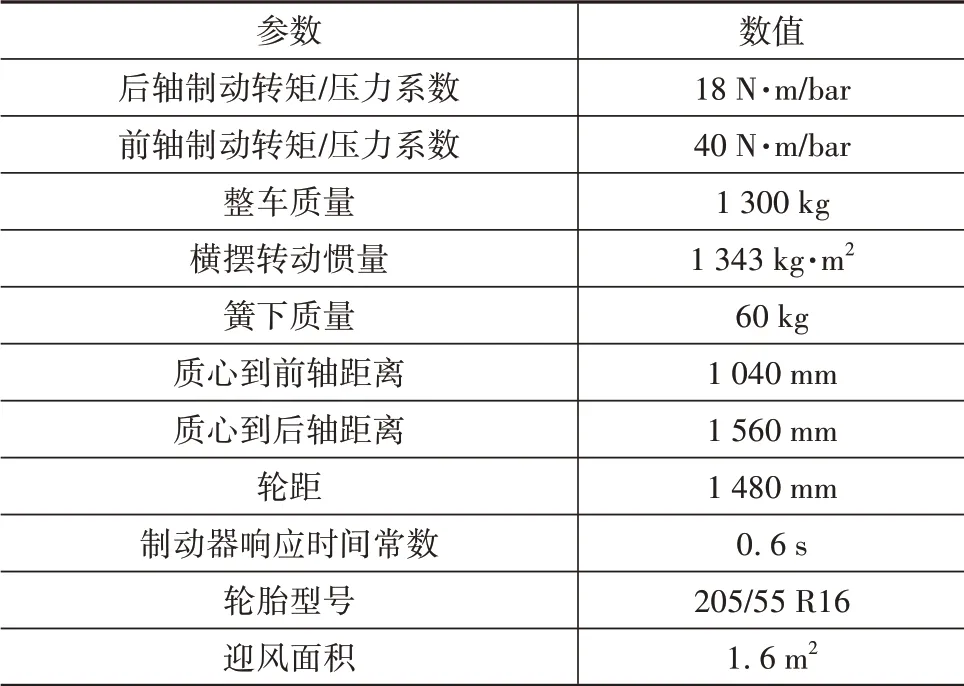
表1 車(chē)輛主要參數(shù)
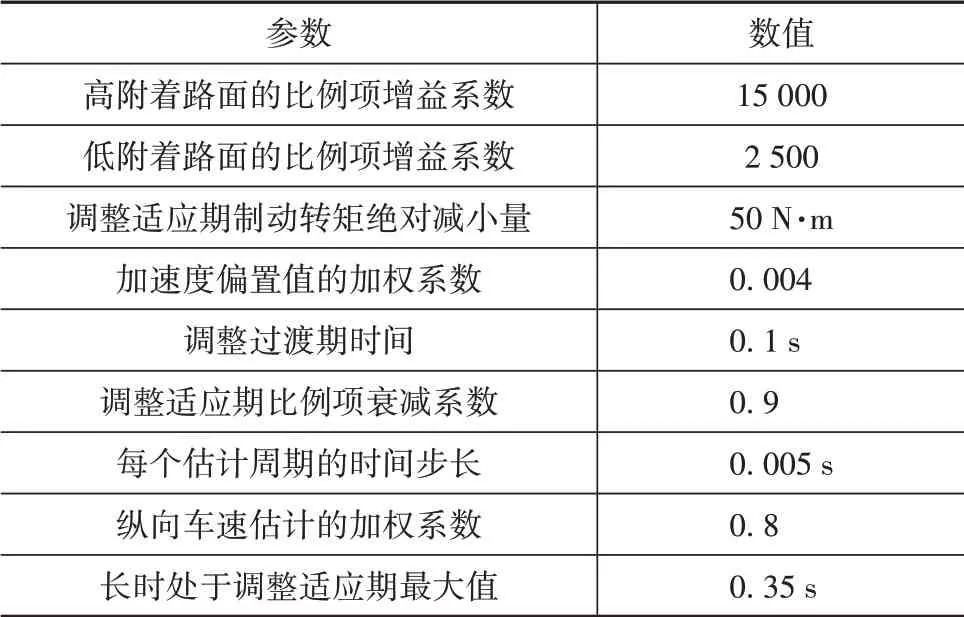
表2 控制器參數(shù)
3.2 高附著路面直行工況
圖7為高附直行工況下的輪速與調(diào)整適應(yīng)狀態(tài)的變化情況。圖中標(biāo)記了不同車(chē)輪進(jìn)入調(diào)整適應(yīng)狀態(tài)的時(shí)間段,后右輪和前左輪交替進(jìn)入調(diào)整適應(yīng)期。車(chē)輪在調(diào)整適應(yīng)期內(nèi)的制動(dòng)力較小,可認(rèn)為隨車(chē)輛非滑移運(yùn)動(dòng),轉(zhuǎn)速與估計(jì)車(chē)速的變化曲線基本保持平行。在調(diào)整適應(yīng)期和正常滑移控制之間的調(diào)整過(guò)渡狀態(tài)時(shí),制動(dòng)力平穩(wěn)增加,因此車(chē)輪減速度也不斷增加。圖8為高附直行工況下的縱向車(chē)速估計(jì)結(jié)果,實(shí)際車(chē)速為CarSim車(chē)輛模型輸出的車(chē)速,估計(jì)結(jié)果與實(shí)際車(chē)速基本一致,誤差基本上維持在1 km/h范圍內(nèi)。
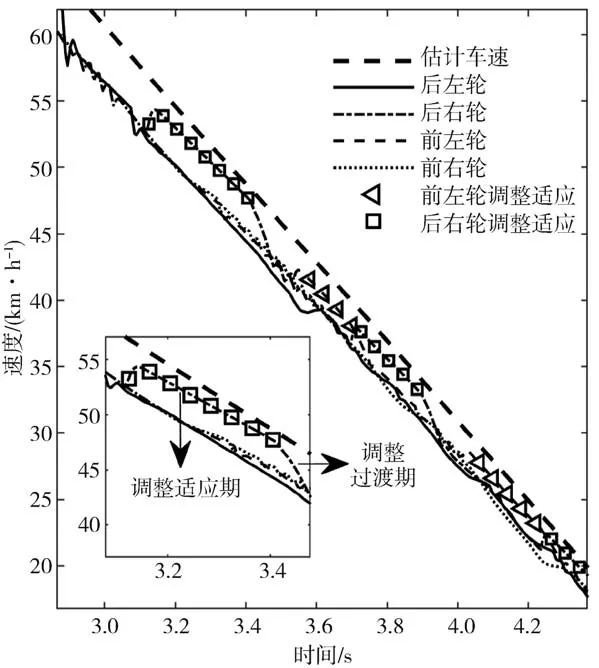
圖7 高附著直行工況輪速與調(diào)整適應(yīng)狀態(tài)變化
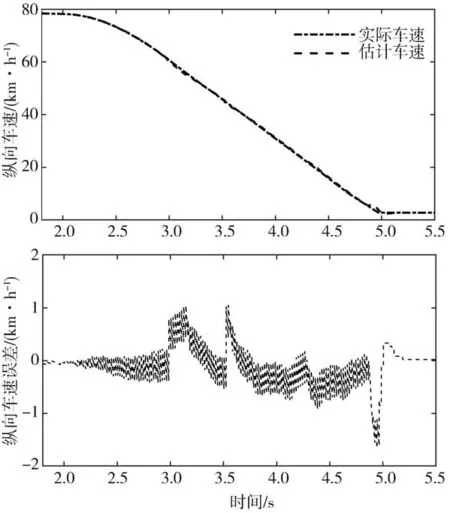
圖8 高附著直行工況縱向車(chē)速估計(jì)結(jié)果與誤差
3.3 低附著路面直行工況
在低附著直行工況緊急制動(dòng)時(shí)軸荷向前軸轉(zhuǎn)移,后軸所提供的制動(dòng)力較小。若某一車(chē)輪長(zhǎng)時(shí)間處于調(diào)整適應(yīng)期,車(chē)輛易制動(dòng)跑偏,因此車(chē)輪須頻繁地進(jìn)入和退出調(diào)整適應(yīng)期。圖9為低附直行工況下輪速與調(diào)整適應(yīng)狀態(tài)的變化,與高附直行工況對(duì)比可看出,車(chē)輪每次處于調(diào)整適應(yīng)狀態(tài)時(shí)間較短且多次進(jìn)入或退出該狀態(tài),以保證引入的調(diào)整適應(yīng)期不會(huì)導(dǎo)致車(chē)輛失穩(wěn)等安全問(wèn)題。圖10為低附直行工況下的縱向車(chē)速估計(jì)結(jié)果,可得到與高附直行工況下類(lèi)似的結(jié)論。
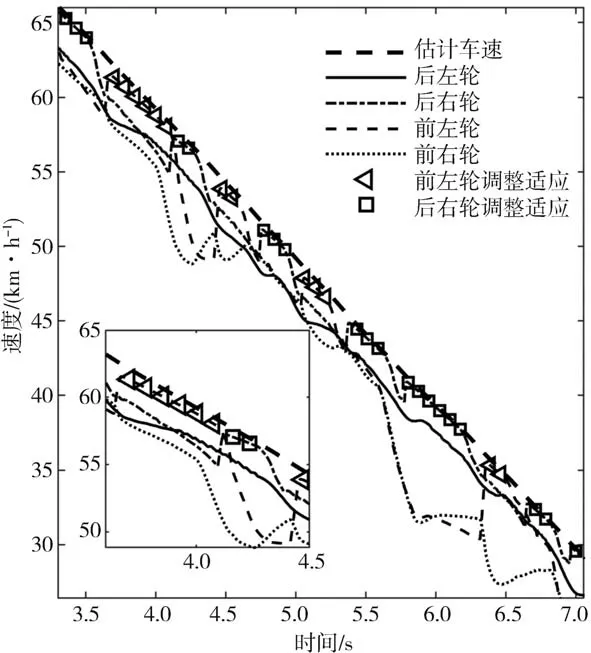
圖9 低附著直行工況輪速與調(diào)整適應(yīng)狀態(tài)變化
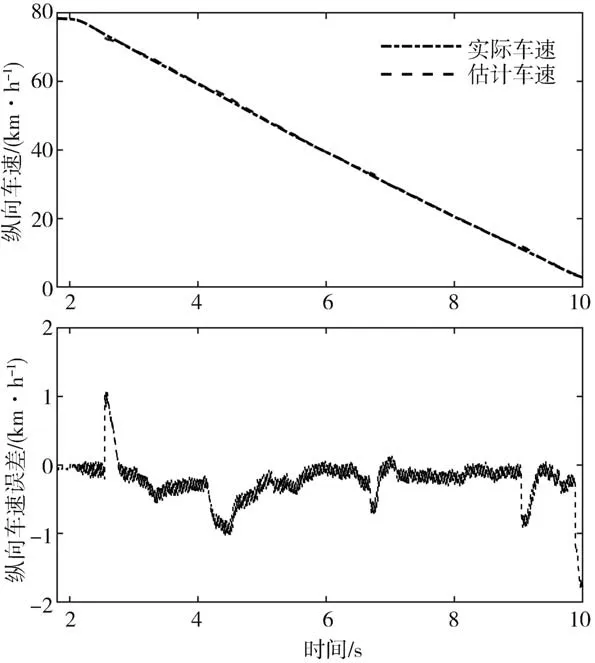
圖10 低附著直行工況縱向車(chē)速估計(jì)結(jié)果與誤差
3.4 高附著路面轉(zhuǎn)向工況
在轉(zhuǎn)向工況下車(chē)輪進(jìn)入調(diào)整適應(yīng)期的優(yōu)選邏輯與直行工況相比有所變化,它優(yōu)先傾向于轉(zhuǎn)向內(nèi)側(cè)車(chē)輪。圖11為高附轉(zhuǎn)向工況下輪速與調(diào)整適應(yīng)狀態(tài)的變化情況,圖12為高附轉(zhuǎn)向工況下的縱向車(chē)速估計(jì)結(jié)果,圖13為高附轉(zhuǎn)向工況目標(biāo)與實(shí)際行駛軌跡對(duì)比。在轉(zhuǎn)向初期開(kāi)始制動(dòng),然后向左轉(zhuǎn)向換道,由于制動(dòng)距離較短,換道結(jié)束后便停車(chē)。由于后軸期望提供的制動(dòng)轉(zhuǎn)矩較小且避免轉(zhuǎn)向內(nèi)側(cè)車(chē)輪垂向力過(guò)小而發(fā)生抱死的風(fēng)險(xiǎn),因此后軸轉(zhuǎn)向外側(cè)車(chē)輪優(yōu)先進(jìn)入調(diào)整適應(yīng)期,即后右輪在轉(zhuǎn)向階段處于調(diào)整適應(yīng)期,然后前左輪短暫進(jìn)入調(diào)整適應(yīng)期后又退出,后右輪再次進(jìn)入調(diào)整適應(yīng)期。
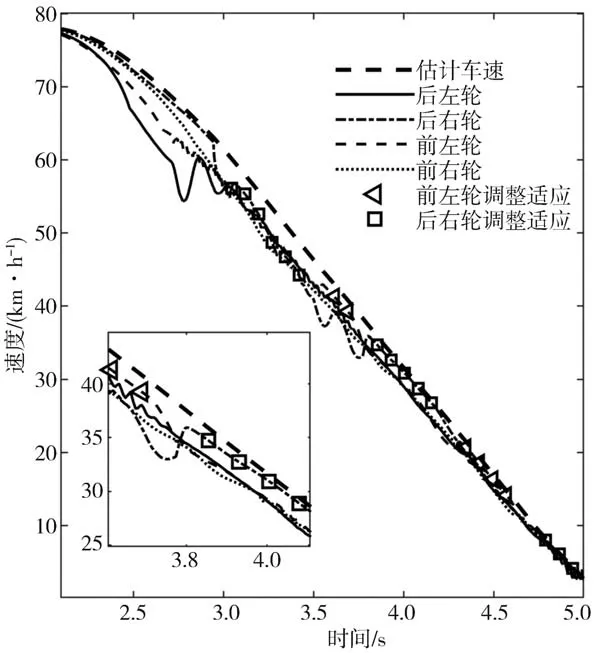
圖11 高附著轉(zhuǎn)向工況輪速與調(diào)整適應(yīng)狀態(tài)變化
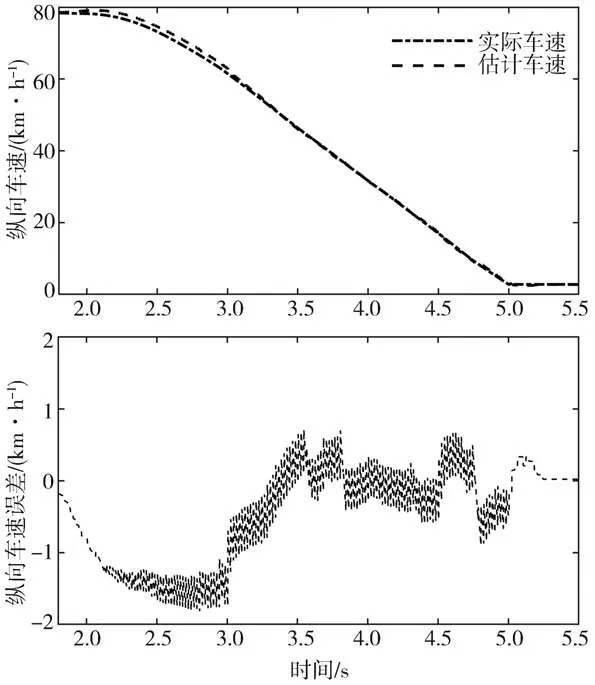
圖12 高附著轉(zhuǎn)向工況縱向車(chē)速估計(jì)結(jié)果與誤差
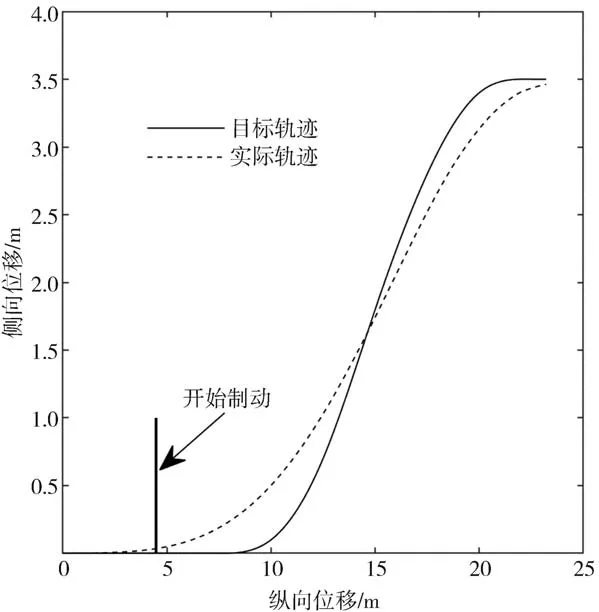
圖13 高附著轉(zhuǎn)向工況目標(biāo)與實(shí)際行駛軌跡
3.5 低附著路面轉(zhuǎn)向工況
低附著路面緊急制動(dòng)并換道易導(dǎo)致車(chē)輛失穩(wěn),制動(dòng)時(shí)間較長(zhǎng)且調(diào)整適應(yīng)期更替復(fù)雜。圖14和圖15分別為低附轉(zhuǎn)向工況前半段和后半段的輪速和調(diào)整適應(yīng)期狀態(tài)變化。圖16為低附轉(zhuǎn)向工況的車(chē)速估計(jì)結(jié)果,圖17為低附轉(zhuǎn)向工況下的目標(biāo)與實(shí)際行駛軌跡。由于側(cè)向滑移的影響,縱向車(chē)速估計(jì)誤差相比其他工況稍大,但也基本保持在大約2 km/h以?xún)?nèi)。在前半段車(chē)輛左轉(zhuǎn)換道,因此后右輪和前左輪先后交替進(jìn)入調(diào)整適應(yīng)期。后半段7~9 s內(nèi)右轉(zhuǎn)向,因此前左輪、后右輪和后左輪依次被優(yōu)選進(jìn)入調(diào)整適應(yīng)期。在9~12 s內(nèi)轉(zhuǎn)為直行后前左輪和后右輪交替被優(yōu)選。從行駛軌跡可以看出,車(chē)輛沒(méi)有喪失轉(zhuǎn)向能力,由于整車(chē)無(wú)橫擺穩(wěn)定性控制,出現(xiàn)了一些側(cè)向滑移。但與普通正常滑移控制相比,調(diào)整適應(yīng)期內(nèi)的車(chē)輪能夠提供較大的側(cè)向力,在一定程度上提高了整車(chē)的側(cè)向穩(wěn)定性。
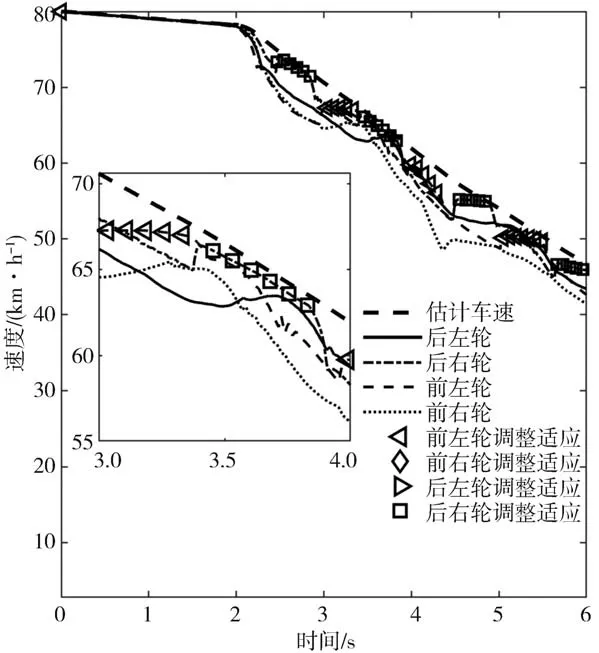
圖14 低附著轉(zhuǎn)向工況輪速與滑移控制器狀態(tài)-前半段
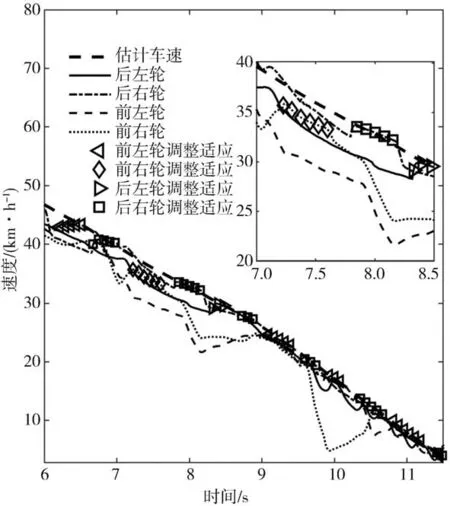
圖15 低附著轉(zhuǎn)向工況輪速與滑移控制器狀態(tài)-后半段
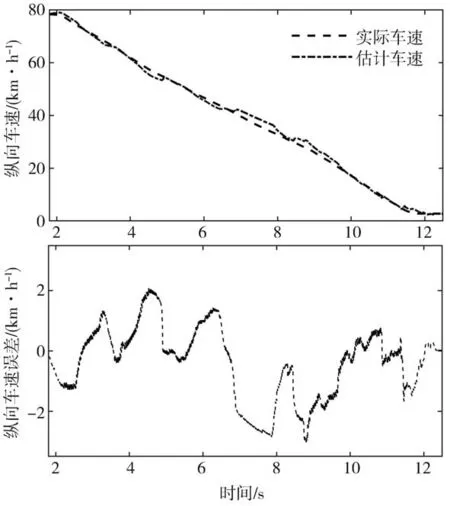
圖16 低附著轉(zhuǎn)向工況縱向車(chē)速估計(jì)結(jié)果與誤差
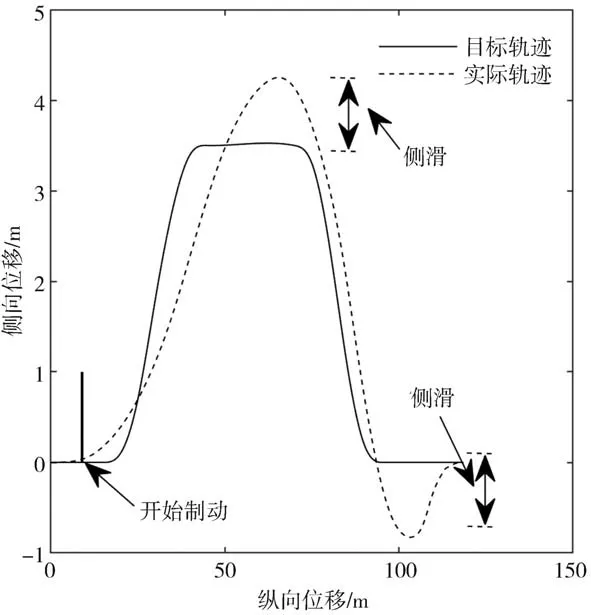
圖17 低附著轉(zhuǎn)向工況目標(biāo)與實(shí)際行駛軌跡
3.6 制動(dòng)性能測(cè)試
為驗(yàn)證具有調(diào)整適應(yīng)期的滑移控制器的制動(dòng)性能,對(duì)比了無(wú)滑移控制(車(chē)輪抱死)、傳統(tǒng)滑移控制(無(wú)調(diào)整適應(yīng)期)和具有調(diào)整適應(yīng)期的滑移控制(本文所提出)三者的制動(dòng)性能,統(tǒng)計(jì)了3種制動(dòng)方式在直行制動(dòng)和轉(zhuǎn)向制動(dòng)工況下的制動(dòng)時(shí)間,分別如表3和表4所示。其中無(wú)滑移制動(dòng)控制器在制動(dòng)開(kāi)始時(shí)便直接將車(chē)輪抱死,失去轉(zhuǎn)向能力。由于無(wú)調(diào)整適應(yīng)期的傳統(tǒng)滑移控制器縱向車(chē)速估計(jì)不準(zhǔn)確,因此直接采用CarSim輸出的縱向車(chē)速用來(lái)計(jì)算車(chē)輪滑移率。
從表3和表4可以看出,3種制動(dòng)方式的制動(dòng)時(shí)間基本一致,由于傳統(tǒng)滑移控制每個(gè)車(chē)輪一直保持在最佳制動(dòng)滑移率下,所受到的制動(dòng)力最大,因此制動(dòng)時(shí)間最短。在高附著路面具有調(diào)整適應(yīng)期的滑移控制器比無(wú)滑移控制器制動(dòng)時(shí)間短,在低附著路面調(diào)整適應(yīng)期內(nèi)的車(chē)輪制動(dòng)力很小,因此制動(dòng)時(shí)間最長(zhǎng)。調(diào)整適應(yīng)期的引入沒(méi)有引起車(chē)輛制動(dòng)性能的衰退,不僅接近正常的滑移控制器制動(dòng)時(shí)間,且能提高車(chē)輛的側(cè)向穩(wěn)定性。
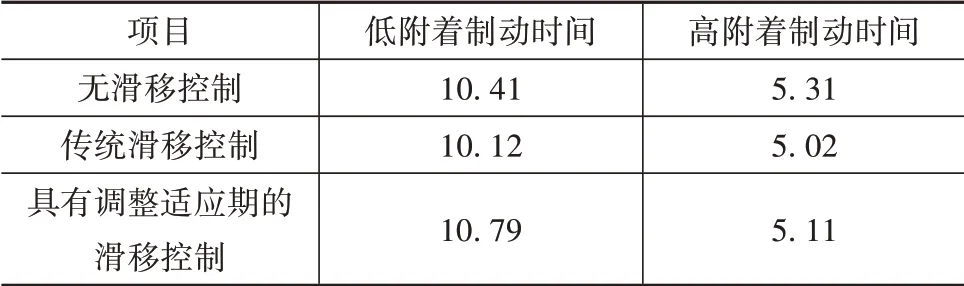
表3 直行制動(dòng)工況時(shí)間 s
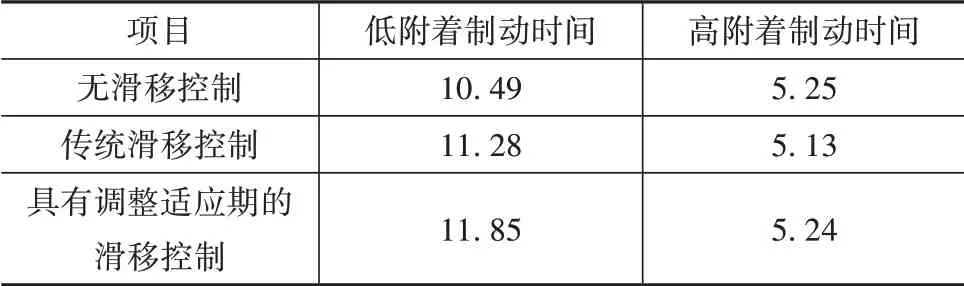
表4 轉(zhuǎn)向制動(dòng)工況時(shí)間 s
4 結(jié)論
摒棄傳統(tǒng)估計(jì)算法設(shè)計(jì)思想,鑒于緊急制動(dòng)工況下縱向車(chē)速估計(jì)困難,設(shè)計(jì)了基于滑移控制器和縱向車(chē)速計(jì)算的聯(lián)合縱向車(chē)速估計(jì)算法。為避免緊急制動(dòng)過(guò)程中4個(gè)車(chē)輪均出現(xiàn)滑移進(jìn)入復(fù)雜非線性區(qū)內(nèi)難以提取車(chē)速,在滑移控制器中引入了調(diào)整適應(yīng)期狀態(tài)和與正常滑移控制協(xié)調(diào)的調(diào)整過(guò)渡期狀態(tài),設(shè)計(jì)了車(chē)輪優(yōu)選邏輯、優(yōu)選觸發(fā)和優(yōu)選退出的機(jī)制,在達(dá)到車(chē)速估計(jì)目標(biāo)前提下,保證了滑移控制器原有的制動(dòng)性能。通過(guò)搭建的輪速信號(hào)處理轉(zhuǎn)換邏輯得到縱向車(chē)速估計(jì)測(cè)量值,以及車(chē)輛動(dòng)力學(xué)模型在無(wú)側(cè)向力需求下計(jì)算縱向加速度基礎(chǔ)值,并通過(guò)加速度的校正,減小縱向制動(dòng)力誤差,最終加權(quán)融合縱向車(chē)速預(yù)測(cè)值和測(cè)量值,完成縱向車(chē)速估計(jì)。在低/高附著路面直行和轉(zhuǎn)向工況下分別進(jìn)行緊急制動(dòng)測(cè)試,驗(yàn)證了縱向估計(jì)算法的精確度和引入調(diào)整適應(yīng)期后滑移控制器的制動(dòng)效能。目前算法驗(yàn)證缺少真實(shí)場(chǎng)景下的信號(hào)干擾和被控對(duì)象的真實(shí)性,下一步擬在實(shí)車(chē)上集成液壓制動(dòng)單元控制策略,開(kāi)展進(jìn)一步的測(cè)試。