彎道工況下駕駛員主觀風險感知的量化研究
2022-10-11 07:44:48郭子彬陳慧夏韜鍇冉巍西村要介王建鎮
汽車工程 2022年9期
郭子彬,陳慧,夏韜鍇,冉巍,西村要介,王建鎮
(1.同濟大學汽車學院,上海201804;2.株式會社捷太格特,奈良6348555;3.捷太格特科技研發中心(無錫)有限公司,無錫214161)
前言
車道居中控制系統(lane centering control system,LCCS)是一種常見的高級駕駛輔助系統(advanced driving assistance system,ADAS),系統通過控制轉向盤轉角將車輛保持在車道中心線行駛。然而,現有的LCCS通常以車輛沿車道中心線行駛為控制目標,而該目標并不符合真實駕駛員的行為習慣,這將降低駕駛員對LCCS的接受度。Spacek的研究表明,在彎道工況,部分駕駛員行駛軌跡與車道中心線存在顯著差異。趙斌等基于主觀評價實驗驗證了駕駛員在高速彎道工況對不同的駕駛軌跡存在明顯選擇傾向。因此,對駕駛員行為的研究是ADAS必不可少的環節。
現有研究表明,駕駛過程中90%的有用信息來自于視覺,且90%的駕駛行為取決于視覺輸入。因此,研究視覺感知的基本特性和這些特性如何影響駕駛員的判斷和操作是理解駕駛員行為的基 礎。駕駛員信息處理過程如圖1所示。
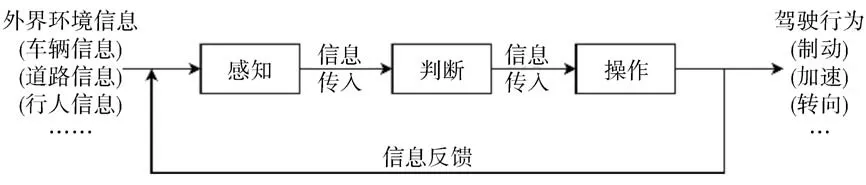
圖1 駕駛員信息處理過程簡化模型
一方面,現有的駕駛員風險感知特性的相關研究局限于對自然駕駛數據的統計分析。Wang等基于采集的自然駕駛數據,建立模擬駕駛員行為的駕駛員模型。Barendswaard等設計分類器,將駕駛員彎道軌跡分成11個類別,代替駕駛員行為模型。但這種方法無法證明其是否符合駕駛員感知特性。文獻[9]中研究直線跟車工況下的駕駛員感知特性,主觀評價實驗驗證結果表明,駕駛員對前車接近過程的風險感知可以由指標1/和1/量化描述,且這種感知特性決定了駕駛員的制動和加速行為。
另一方面,彎道工況的車道偏離風險感知特性目前還無人進行實驗驗證。當車輛通過彎道時,駕駛員通常會調整與邊界線的距離,以期能夠安全舒適地過彎,這種距離的調整考慮了車輛當前位置和邊界線的偏差和對未來一段時間內偏差變化預測的主觀風險估計,且風險感知的量化研究有助于理解駕駛員在彎道上的操作。因此為定量確定駕駛員在通過彎道時對風險的主觀感知,首先須找出定義車輛與邊界線空間關系的物理參數和風險感知心理量的關系。
為解決上述問題,本文中研究分析了高速匝道工況下車道偏離時對駕駛員風險感知的影響因素,并基于駕駛模擬器進行主觀評價實驗,建立了駕駛員主觀風險感知估算模型。然后通過對駕駛員自然駕駛數據的分析驗證了所建模型的有效性。
1 主觀風險感知的分類與影響因素
有學者將風險感知分為潛在風險(latent risk)和顯性風險(overt risk)。在無鄰車的彎道駕駛工況中,潛在風險指的是由于操縱行為的不確定性和外部干擾造成的車道偏離碰撞風險,也即使車輛保持當前運動狀態行駛而不發生碰撞。顯性風險指的是車輛已經發生車道偏離,且沒有任何糾正措施導致發生碰撞事故所產生的風險。
受文獻[9]對跟車工況下前車接近時風險感知量化的啟發,本文中提出基于3種風險感知指標的主觀風險感知量化方法,如圖2所示。(a)CTLC(curved time to line crossing),表示車輛保持當前速度與橫擺角速度行駛時與車道邊界線發生接觸的時距。(b)STLC(straight time to line crossing),表示車輛保持當前速度和航向角不變時與車道邊界線發生觸碰的時距。(c)TAD(time to anticipate distance),表示用車輛當前位置到車道邊界線的距離除以速度得到的值。對應的計算公式為
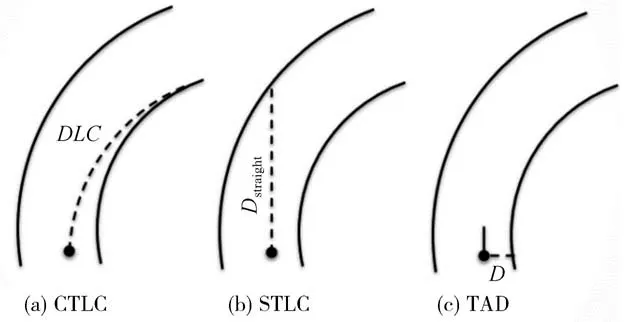
圖2 風險感知指標示意圖

式中:表示軌跡曲率固定時,車輛沿該軌跡行駛到達道路邊界的行駛距離;表示車輪轉向角為0°時,車輛行駛到達邊界的行駛距離;表示車輛當前與車道邊線的橫向最小距離;表示車速,m/s。
CTLC從時間的角度量化了車輛觸碰車道邊界線的風險裕度。文獻[12]中的理論分析表明,CTLC為解釋駕駛員自然駕駛行為對橫向位置和速度范圍的選擇提供強有力的依據。另外,有研究結果表明,駕駛員會通過調整入彎方式來獲得較大的STLC,從而降低過彎時的壓力。現有研究通常僅在LKA(lane keeping assist)系統中考慮駕駛員的個性化橫向偏移偏好。其原因是駕駛員期望避免潛在風險。與此同時,潛在風險的程度還受車速的影響,因此本文提出TAD指標衡量這一駕駛員風險感知特性。
直線跟車工況的風險感知驗證實驗結果表明,駕駛員通過1/感知與前車的相對關系,而不是。由于研究對象類似,本研究假設風險感知可以由指標1/、1/、1/進行量化。
根據風險感知的分類定義,顯性風險可以由指標1/表示。潛在風險由1/和1/共同表征。為驗證上述假設,分別針對潛在風險和顯性風險設計了如下駕駛實驗。
2 主觀風險感知量化實驗方法
2.1 實驗設備
為能在彎道工況中實時生成穩定的駕駛條件并模擬駕駛員在真實場景中的駕駛體驗,本研究的所有實驗均在固定基座駕駛模擬器上進行。視覺場景由一整塊高分辨率(3840×1080)的曲面屏顯示輸出,覆蓋接近100°的水平視角和40°的垂直視角范圍。如上所述,視覺信息是駕駛員感知外界環境的主要來源。為只關注源于視覺信息的風險感知,在本研究的主觀評價實驗中,沒給駕駛員其他形式的體感刺激。
2.2 實驗場景
研究路段采用真實單車道高速公路匝道數據設計實驗場景,匝道形狀由直線-緩和曲線-圓弧-緩和曲線-直線連接構成。實驗道路半徑范圍均來源于開源地圖OpenStreetMap測量的真實道路半徑。車道右側保留寬度為2.5 m的應急車道,在左側車道線與護欄之間余留0.75 m空隙。為使實驗場景顯示盡可能與真實駕駛員視野一致,實驗對場景視野進行標定。搭建好的場景效果與真實道路場景高度相似,如圖3所示。

圖3 場景標定
2.3 實驗內容
實驗假設彎道工況下駕駛員的顯性風險取決于1/、潛在風險取決于1/、1/。因此分別針對這兩種風險類型設計驗證實驗。
實驗1:穩定過彎情況下風險感知的量化。本實驗旨在模擬不發生車道偏離時,即車輛與車道邊界線保持恒定距離,駕駛員的風險感知(風險水平僅取決于潛在風險)。
實驗2:車道偏離情況下風險感知的量化。本實驗的目的是模擬車輛從車道中心以一定的轉向角逐漸靠近車道邊界線產生的風險(風險水平主要取決于顯性風險)。
2.4 實驗流程
實驗共招募了15名受試者。受試者年齡范圍為23-50歲,其中包括3名專業駕駛員、4名女性駕駛員,超過半數具有較長駕齡(至少5年以上)。在了解完實驗內容后,每人都簽署了一份書面知情同意書。
在實驗中,受試者無須控制轉向盤轉角和加速踏板,只須通過使用數值評估(magnitude estimation,ME)方法對基于配對比較的實驗組進行風險評估。ME方法是一種通過直接讓受試者表達感知程度大小來建立人類感知和刺激強度之間關系的過程。
具體來講,實驗會重復進行下面的流程。
(1)受試者按照駕駛模擬器生成的標準刺激條件進行彎道行駛一段時間(實驗1:10 s;實驗2:5 s)。
(2)通過顯示空白屏幕,作兩個場景的過渡,時間為1 s。
(3)顯示比較刺激條件下的彎道場景,要求受試者行駛和(1)相同的時間。
受試者須口頭表達他們對(3)中的比較刺激感知的風險比對(1)中的標準刺激感知的風險增加了多少倍。
例如:給定一組比較對,率先出現的風險場景為標準刺激,后出現的定為比較刺激。告知受試者標準刺激的風險水平為1,然后要求他們給出所呈現的不同條件的比較刺激的風險相比標準刺激增加/減少了多少倍。例如,比較刺激中車輛至車道邊線的距離僅為標準刺激中車輛至車道邊線距離的1/1.5,因此受試者感受到比較刺激的風險程度是標準刺激的1.5倍,即表示比較刺激的風險水平為1.5。每組對比實驗重復3次。
2.5 實驗1參數分布
穩定過彎情況下,由于車輛在彎道中的行駛方向始終與車道中心線平行。不存在車道偏離,只須考慮潛在風險。此時車輛的1/值對車道中心線呈對稱關系,1/值隨車輛逐漸從車道內側向車道外側偏移,呈增大的趨勢。
實驗1選擇了最典型的高速匝道工況,將彎道半徑設置為120 m。實驗采用下面描述的兩種測試類型來考察車輛在彎道中的橫向位置和速度對風險感知的影響,每種類型設計了7個場景用于配對比較。實驗參數分布如表1所示,其中表示車輛距離最近車道邊界線的橫向距離。
①不同橫向偏移距離的配對比較實驗。實驗設定以恒定速度(=13 m/s)通過彎道,通過設置不同的橫向偏移距離改變風險大小。例如,在表1中場景1和場景3的對比實驗中,受試者以相同的速度通過彎道,須比較對車道邊界線0.3和1.3 m不同間隔距離的風險感知。
②不同車速的配對比較實驗。實驗設定與車道邊界線保持恒定距離(=0.7 m),通過改變車速設計不同風險的場景。例如在表1中的場景2和場景5的對比實驗中,受試者以相同的橫向偏距行駛,須比較10和20 m/s不同速度下的風險感知。
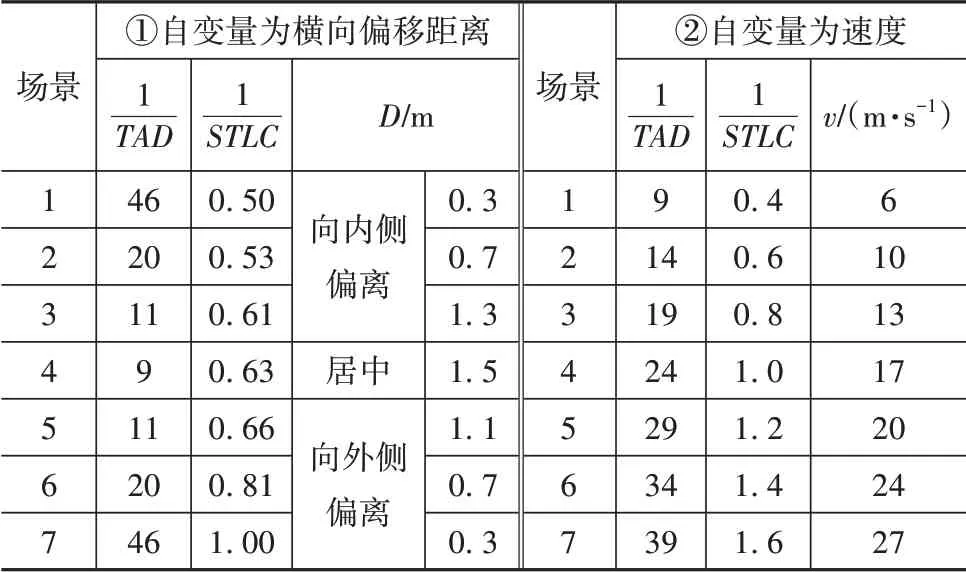
表1 實驗1的參數分布
2.6 實驗2參數分布
當車輛發生車道偏離,表明按照這種趨勢繼續行駛,一定會與車道邊界線發生接觸,甚至碰撞護欄。此時影響駕駛員更多的是顯性風險。
實驗2的目的是通過分析受試者對車道偏離風險的主觀評估與實際刺激的關系,驗證使用1/量化表征顯性風險的可行性。雖然在車道偏離工況下,顯性風險占據駕駛員感知主導,但潛在風險數值不為0,如實驗1結果所示。為避免由于客觀潛在風險的變化影響受試者對客觀顯性風險的主觀感知的判斷,實驗2中采用的場景均具有相同的潛在風險水平。
在車道偏離的過程中,風險是時刻變化的,且隨時間逐漸增大。實驗2對偏離過程的最后時刻進行實驗設計。受試者須根據車道偏離過程的最后時刻對風險程度進行估計,實驗流程如第2.3節中所示。
一般而言,彎道半徑越小,駕駛員的風險感知越明顯。因此分別選取實際公路匝道半徑為60和120 m的彎道場景進行實驗設計。每種彎道設計7個場景用于配對比較。所有參數均表示最后時刻的值,參數分布如表2所示。
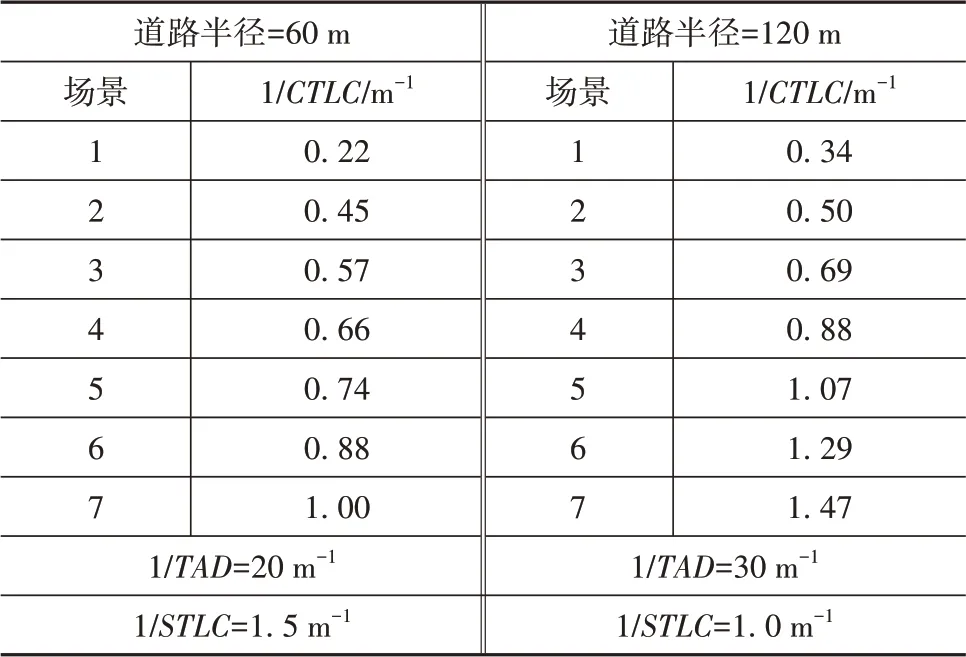
表2 實驗2的參數分布
3 實驗1穩定過彎情況下主觀風險感知的量化
3.1 主觀風險感知評價結果
圖4顯示實驗1中所有受試者的主觀風險感知評價結果及其置信區間和平均值。橫軸表示表1中不同風險刺激的場景,縱軸表示受試者在不同比較刺激場景下相對于標準刺激的主觀風險評價值。由圖中淺色帶狀置信區間可見,90%的置信區間表明受試者的評價結果有90%的可能性落在該區間內,且區間的趨勢與平均值趨勢一致,表明數據整體分布的離散度較小。把圖4(a)和圖4(b)中的場景4、圖4(c)中的場景3的主觀風險評價值作為標準刺激值,設為1.0。
圖4(a)表示右彎道條件的實驗結果。由圖可知,受試者的風險感知隨車輛偏離車道中心距離增大而增大。且偏離相同距離時,靠近車道外側的風險感知明顯大于內側。這一現象解釋了駕駛員在彎道中行駛更傾向于靠近車道內側而不是外側的原因。
圖4(b)表示左彎道的實驗結果。與圖4(a)中的結論高度吻合。不同的是,左彎道中受試者普遍對場景3的風險感知最低。這一現象解釋了很多駕駛員相比于車輛居中行駛更喜歡靠內側行駛的原因。
圖4(c)表示受試者因車輛速度變化產生不同的風險感知。速度越快受試者的風險感知越大。
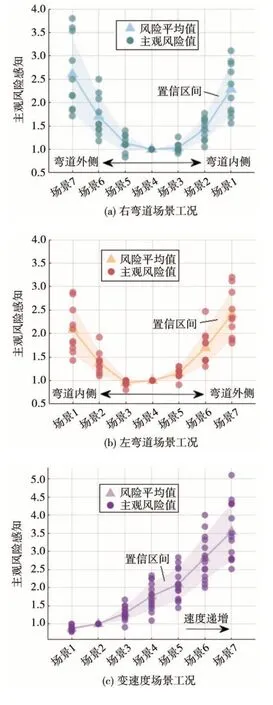
圖4 實驗1結果
3.2 潛在風險量化模型的構建
基于第3.1節獲得的結果,由受試者評估的感覺強度與物理刺激的關系可以用下面的史蒂文斯冪律方程近似擬合。

式中:為常數;為取決于刺激類型的冪指數。
在實驗1結果中,駕駛員在彎道中的潛在風險感知很難用橫向偏移距離和速度進行統一描述和解釋。由于在幾何空間中1/具有車道中心對稱性,1/具有隨車輛從車道內側向車道外側移動逐漸增大的性質,能夠合理解釋上述現象。因此嘗試用1/、1/構建如下潛在風險模型。

式中、為權重系數,分別表示1/、1/的權重。
為將主觀風險和客觀風險指標()統一為相同維度,設定標準刺激場景的客觀風險指標也為1。通過分布不同的權重參數、,對3種場景下的主觀風險感知進行擬合。預實驗研究表明,當速度過高或過低時,受試者對風險的判斷并不符合規律,因此擬合是在=[25 km/h,90 km/h]內進行的。
圖5所示為基于的客觀風險刺激和主觀評價風險的史蒂文斯冪定律方程擬合結果。當=1.3、=0.03時模型的擬合精度最高。由圖5可知,本文構建的模型與駕駛員的主觀評分規律一致。結果表明,不管是在左彎道或右彎道,不管是改變橫向偏移距離還是固定偏移距離改變速度,越大,受試者的風險感知越強。且3種場景下的擬合曲線也顯示出相同的變化趨勢,冪指數都約為1。即表示的客觀風險增加多少倍,受試者的風險感知就增加相應的倍數。因此該模型能夠根據彎道場景客觀指標量化表征駕駛員的主觀風險感知。
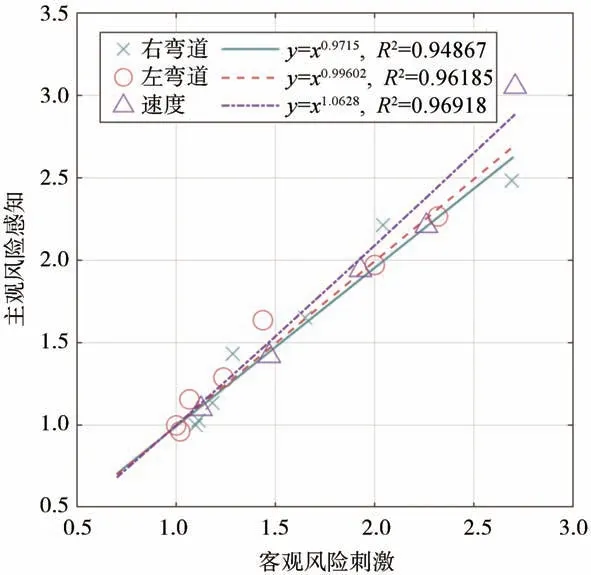
圖5 客觀風險刺激和主觀評價風險的關系
3.3 小結
綜上所述,實驗1的結果表明,穩定過彎時受試者的主觀風險感知程度與成正比。驗證了本研究關于潛在風險可以用1/、1/量化表征的假設。模型的公式為

4 實驗2偏離車道情況下主觀風險感知的量化
4.1 主觀風險感知評價結果
利用等比量表的特性,對受試者風險感知的主觀評分進行處理。由于受試者基于等比量表對風險感知評分,其比率具有等價性。因此可以對實驗得到各場景的比較風險評估值乘以某個點的比率,計算出所有點相對于該點的風險值。假設兩種彎道半徑的實驗中取1/最小的場景風險感知為1,計算其他任意場景的風險感知。換句話說,計算其他場景相對于場景1的風險感知增量。
圖6所示為所有受試者的主觀風險評價的統計學數據,所有評價數據都是在設定場景1的風險水平為1的基礎上計算得到。圖6(a)和圖6(b)分別表示彎道半徑為60和120 m場景中的實驗結果。實驗發現兩個比較場景差異越大,個體駕駛員的主觀評價差異也越大,例如場景7。結合表2可以看出,1/越大,受試者的風險感知越強。
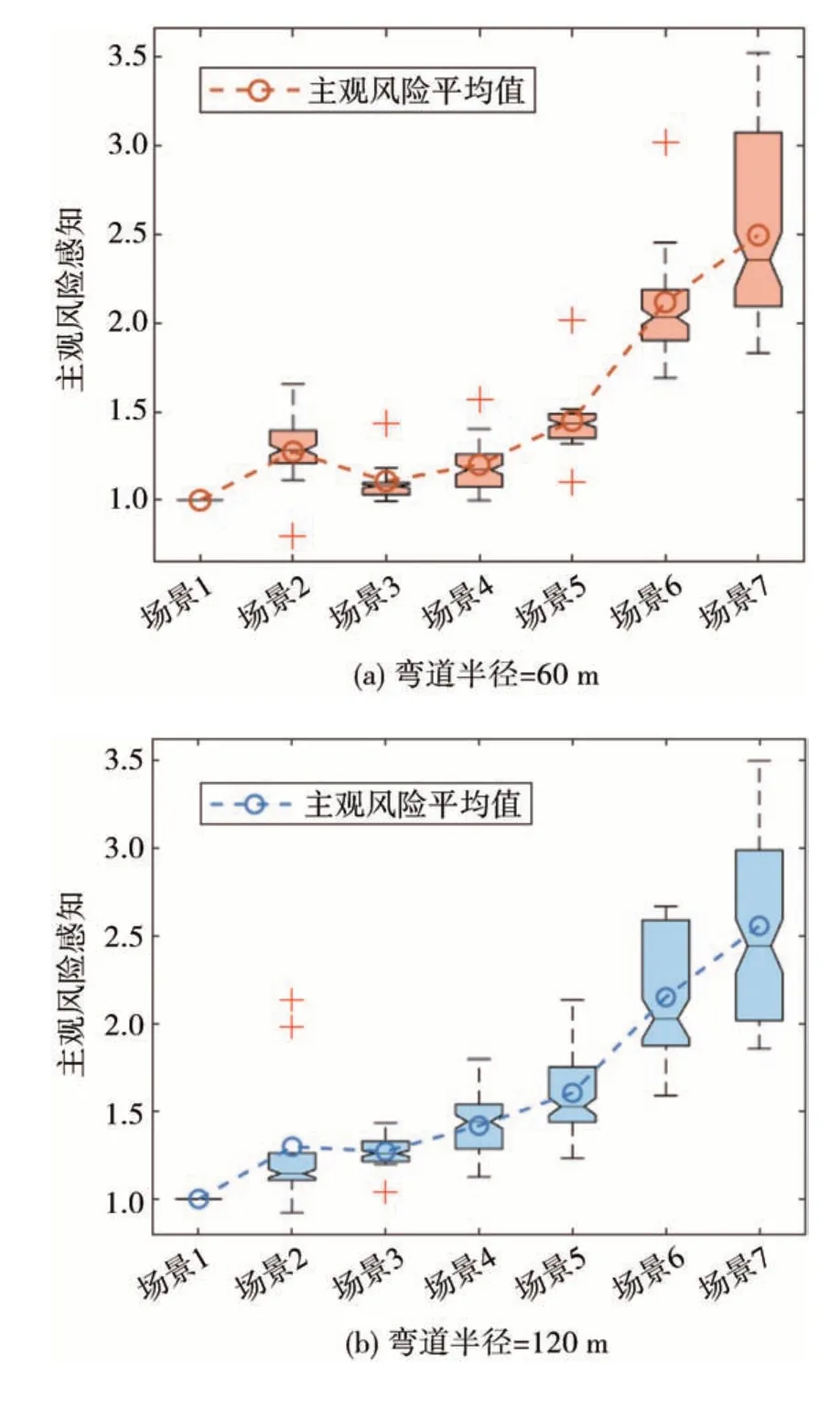
圖6 實驗2結果
4.2 實驗2總體風險量化模型的構建
為將主觀風險和客觀風險指標()統一為相同維度,設定標準刺激場景的客觀風險指標也為1。依此計算其他場景的客觀風險刺激強度,其計算公式為

式中:等于標準刺激場景的顯性客觀風險指標即場景1的1/值;等于比較刺激場景的顯性客觀風險指標即場景2-7的1/值。
圖7為只考慮客觀顯性風險時,客觀刺激強度和主觀風險感知的關系。并利用最小二乘法對史蒂文斯冪定律方程進行擬合。擬合曲線的冪指數大約為0.55。雖然在兩種道路半徑下,受試者表現出的風險感知特性相似,但它不符合駕駛員的主觀風險感知對客觀刺激強度是線性的這一規律,這一點在文獻[15]和第3.2節中都作過說明。
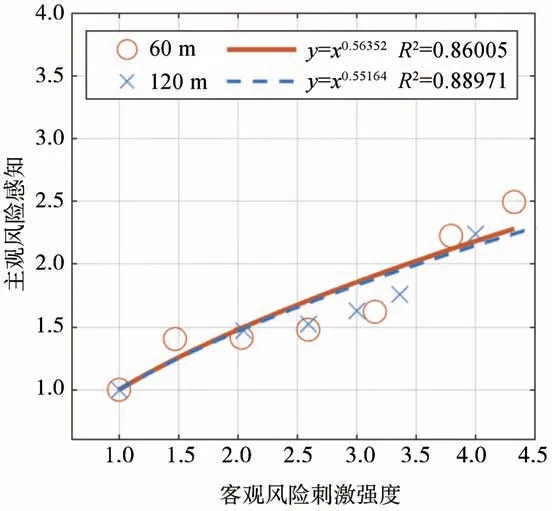
圖7 客觀顯著風險和主觀評價的關系
如上文所述,雖然在車道偏離過程中,占據主導作用的是顯性風險,但潛在風險是始終存在的。實驗2針對不同彎道半徑的場景分別固定了實驗1結論中用于表示潛在風險的1/、1/。而受試者實際的風險感知由這兩部分共同組成。因此須重新定義包含潛在風險的客觀風險刺激強度,計算公式為
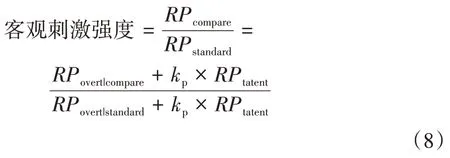
式中:表示比較刺激的總體客觀風險;表示標準刺激的總體客觀風險;表示根據實驗1結果計算得到的潛在風險值;為潛在風險相對于顯性風險的權重系數。
圖8所示為考慮總體客觀風險時,客觀刺激強度和主觀風險感知的關系。參數識別結果為=0.2,即在實驗2條件下,受試者對潛在風險的感知是顯性風險感知的1/5。利用最小二乘法擬合的曲線冪指數均近似為1,表明客觀風險刺激強度增加多少倍,受試者的風險感知就增強多少倍。此結論與實驗1相同。
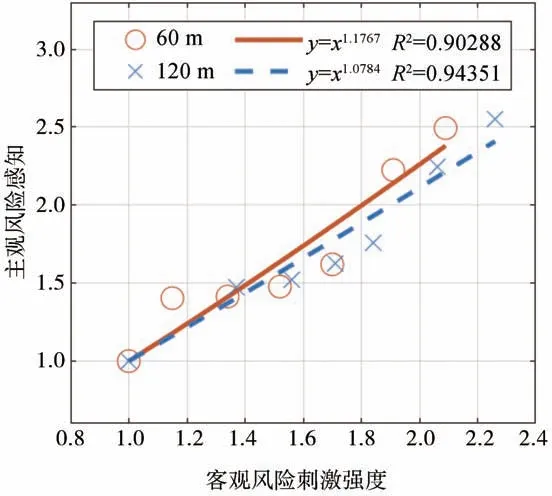
圖8 客觀總體風險和主觀評價的關系
4.3 小結
綜上所述,實驗2的主要結論有兩點:(1)駕駛員的顯性風險可以由1/量化表示。(2)發生車道偏離時,駕駛員的總體風險感知()由顯性風險和潛在風險組成,且潛在風險是顯性風險的1/5,公式表示為

5 風險感知公式驗證
5.1 驗證實驗方法
本研究利用駕駛模擬器實驗中記錄的駕駛員自然駕駛數據來檢驗上述風險量化模型的有效性。首先,與真實世界的駕駛環境相比,模擬器能夠準確記錄所需數據,且可通過道路設計在較短的時間內獲得足夠多的樣本。
其次,如果駕駛員在彎道中的駕駛行為基于對風險的主觀感知,自然駕駛數據中的風險水平必定符合特定規律。因此,為驗證建模結果的有效性,須對比主觀評價實驗場景與自然駕駛數據中的1/、1/、1/。為闡明風險公式適用范圍的廣泛性,須在各種條件下測量駕駛員的行為,包括不同彎道半徑和不同速度等。因此本實驗設計了多工況的測試道路,并記錄駕駛員在通過彎道時的風險指標值。
由于在彎道行駛過程中駕駛員通常會保持精神的高度集中,較穩定地通過彎道是駕駛員的常態。因此對穩定過彎工況的風險感知模型進行驗證。
5.2 驗證實驗環境設計
道路的寬度、匝道邊距與實驗1、2保持一致。為保證彎道更貼近現實世界,實驗通過開源地圖OpenStreetMap(開放式數據庫協議https://www.openstreetmap.org/copyright)下載了上海市交通流密集的一段高架匝道數據,如圖9所示。實驗仿照此路段通過Prescan設計了閉環道路。為提高駕駛員對速度的感知力,駕駛模擬器對車輛行駛噪聲進行模擬,且在道路的兩邊增加樹木。

圖9 OpenStreetMap中的道路
共有17位駕駛員參與此次駕駛實驗,駕齡均在3年以上,年齡分布在20-50歲之間。模擬駕駛實驗要求駕駛員手動控制加速踏板和轉向盤,車速為30~70 km/h。
5.3 驗證實驗結果分析
圖10為駕駛員通過彎道時的客觀風險指標(1/和1/)的聯合分布圖。由圖可知,駕駛員自然駕駛時的風險水平幾乎始終處于風險邊界線之下,這說明駕駛員總是試圖將/+/表達的風險控制在一定范圍內。如果大于某一界限,即超出駕駛員所能接受的風險,駕駛員會尋求調整速度或轉動轉向盤來降低風險。
為提取此風險邊界線,實驗首先對數據進行篩選,去掉由于駕駛員異常操作記錄的離群數據,然后進行分段劃分,橫坐標每間隔1為一段,然后提取95百分位的數據用于風險邊界線的擬合。假設95百分位的數據代表了駕駛員不可接受的風險邊界,或他們會較大幅度地調整駕駛狀態。這樣的邊界樣本擬合的結果即表示風險邊界線。得到的直線如圖10所示,擬合方程為
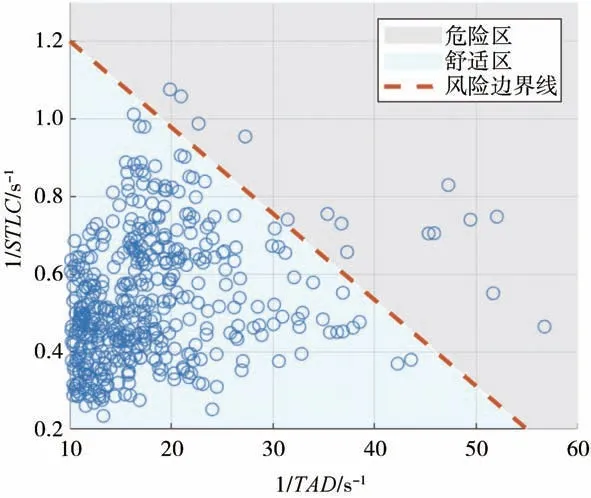
圖10 彎道自然駕駛風險概況

式(11)可近似轉化為式(12),這與實驗1得到的潛在風險的式(6)量化表達式幾乎一樣。對結果的解釋是,當1.35×1/+0.03×1/大于2時,駕駛員由于較高的風險感受而產生轉向盤糾正行為,降低潛在風險并實現車道保持目的。
綜上所述,本實驗通過采集基于駕駛模擬器的自然駕駛數據,提取分析了駕駛員通過彎道時的客觀風險指標。結果表明,風險邊界線與實驗1得到的風險感知公式高度相似,基于主觀評價實驗的駕駛員風險感知量化模型合理。
6 結論
在駕駛模擬器的基礎上,建立駕駛員在彎道工況下對車道偏離風險感知模型。然后利用駕駛員自然駕駛數據驗證了該模型的有效性。本研究得出的結論如下:
(1)駕駛員的風險感知劃分為顯性風險和潛在風險,且在彎道工況下顯性風險可以用1/表示,潛在風險由1/和1/的線性組合表達。
(2)量化了1/、1/、1/與風險感知的關系,并建立風險感知模型。
(3)在模擬真實駕駛環境中測量駕駛員通過彎道時的風險數據,實驗結果驗證了潛在風險感知模型的有效性。且指明當潛在風險大于2時,駕駛員會有較高的風險感受。
一般認為,駕駛員的駕駛過程是由感知-判斷-操作的重復過程組成,而本研究通過實驗驗證了1/、1/、1/在風險感知中的重要性,這有助于進一步理解駕駛員的操作行為,對符合駕駛員行為習慣的輔助駕駛功能的開發如LCCS、LKA等具有啟示意義。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
汽車電器(2018年1期)2018-06-05 01:22:54
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
公民與法治(2016年4期)2016-05-17 04:09:26