自動(dòng)緊急制動(dòng)系統(tǒng)仿真測(cè)試的制動(dòng)模型修正
2022-10-11 17:01:58吳振昕張正龍
汽車安全與節(jié)能學(xué)報(bào) 2022年3期
關(guān)鍵詞:模型
劉 濤,遲 霆,王 迪,吳振昕,張正龍
(中國(guó)第一汽車股份有限公司 智能網(wǎng)聯(lián)開(kāi)發(fā)院,長(zhǎng)春130000,中國(guó))
車輛行駛安全是自動(dòng)駕駛系統(tǒng)研發(fā)過(guò)程中的重點(diǎn)內(nèi)容[1],也是未來(lái)智能網(wǎng)聯(lián)車能否商業(yè)化的關(guān)鍵。自動(dòng)緊急制動(dòng)(autonomous emergency braking,AEB)系統(tǒng)通過(guò)毫米波雷達(dá)和攝像頭等傳感器感知前方物體,當(dāng)判定存在碰撞風(fēng)險(xiǎn)時(shí),向駕駛員提供預(yù)警和主動(dòng)制動(dòng)的方式規(guī)避本車與前方物體的碰撞。AEB 系統(tǒng)能夠有效減少交通事故發(fā)生,提高車輛主動(dòng)安全性能,因此受到越來(lái)越多的主機(jī)廠及科研機(jī)構(gòu)的重視[2]。
為對(duì)AEB 系統(tǒng)的有效性進(jìn)行驗(yàn)證,一些國(guó)家和機(jī)構(gòu)制定了一系列標(biāo)準(zhǔn)法規(guī),用于AEB 測(cè)試評(píng)價(jià)。2014 年,歐洲新車安全評(píng)鑒協(xié)會(huì)(European New Car Assessment Programme,Euro-NCAP)將AEB 功能納入到整體安全評(píng)級(jí)中[3]。2015 年,美國(guó)高速公路安全管理局(National Highway Traffic Safety Administration,NHTSA)在 新車評(píng)價(jià)體系中加入了AEB 功能[4]。2018 年,中國(guó)新車評(píng)價(jià)規(guī)程(China New Car Assessment Programme,C-NCAP)增加了AEB 功能測(cè)評(píng),包括追尾防護(hù)和行人保護(hù)等功能[5]。上述標(biāo)準(zhǔn)法規(guī)主要針對(duì)實(shí)車試驗(yàn),可以最大程度保證AEB 功能測(cè)試的準(zhǔn)確性,但試驗(yàn)成本較高且存在一定風(fēng)險(xiǎn)[6]。
目前學(xué)者們對(duì)AEB 仿真測(cè)試的應(yīng)用主要集中于對(duì)控制算法或評(píng)價(jià)體系的驗(yàn)證分析,而對(duì)提升AEB 仿真測(cè)試精度的研究比較匱乏。AEB 仿真測(cè)試對(duì)控制算法驗(yàn)證和試驗(yàn)結(jié)果分析,應(yīng)建立在較高測(cè)試精度的基礎(chǔ)上,因此,建立高可信度的AEB 仿真測(cè)試系統(tǒng)顯得至關(guān)重要。
HAN Inhwan 對(duì)NHTSA 的車輛路口碰撞事故數(shù)據(jù)進(jìn)行了提取分析,提出了17 種新的事故場(chǎng)景并進(jìn)行仿真驗(yàn)證[7];李霖等人針對(duì)中國(guó)道路交通環(huán)境下騎車人引發(fā)的交通事故,應(yīng)用聚類分析對(duì)采集的危險(xiǎn)工況進(jìn)行研究,設(shè)計(jì)了7 類典型危險(xiǎn)場(chǎng)景,通過(guò)設(shè)計(jì)測(cè)試車輛和目標(biāo)車輛的速度,建立面向騎車人的典型AEB測(cè)試方法,并利用仿真軟件進(jìn)行了測(cè)試驗(yàn)證[8]。林國(guó)慶等人通過(guò)分析中國(guó)交通事故深入研究(China In-Depth Accident Study,CIDAS)乘用車事故數(shù)據(jù),制定出多種符合中國(guó)國(guó)情AEB 行人測(cè)試場(chǎng)景,并用仿真軟件進(jìn)行了合理性驗(yàn)證[9]。張慧等人基于直線行駛時(shí)前后2 車的運(yùn)動(dòng)情況,對(duì)其交互過(guò)程進(jìn)行理論分析,選取加速度的碰撞時(shí)距作為參數(shù),提出了3 種測(cè)試工況,并在虛擬環(huán)境中進(jìn)行了仿真測(cè)試,對(duì)提出的測(cè)試工況、評(píng)價(jià)參數(shù)進(jìn)行了分析[10]。
本文基于一汽集團(tuán)某車型自主開(kāi)發(fā)的自動(dòng)緊急制動(dòng)(AEB)控制算法,搭建由場(chǎng)景模型、車輛模型、傳感器模型和控制算法模型組成的閉環(huán)仿真測(cè)試系統(tǒng),完成AEB 仿真測(cè)試,并用實(shí)車試驗(yàn)結(jié)果對(duì)仿真模型進(jìn)行了修正,以期提高AEB 仿真測(cè)試精度。最后,通過(guò)實(shí)車試驗(yàn),來(lái)驗(yàn)證搭建的AEB 仿真測(cè)試系統(tǒng)的準(zhǔn)確性。
1 自動(dòng)緊急制動(dòng)仿真測(cè)試系統(tǒng)
1.1 系統(tǒng)架構(gòu)
本文的自動(dòng)緊急制動(dòng)仿真測(cè)試系統(tǒng)是基于ASM 和Simulink 聯(lián)合仿真實(shí)現(xiàn)各模型所搭建和集成的。ASM是由dSPACE 公司開(kāi)發(fā)的仿真軟件,支持車輛動(dòng)力學(xué)及交通場(chǎng)景仿真。其中 ASM Vehicle Dynamics 是車輛動(dòng)力學(xué)實(shí)時(shí)仿真模型,該模型為多體系統(tǒng),包括動(dòng)力傳動(dòng)模型、發(fā)動(dòng)機(jī)模型、半經(jīng)驗(yàn)輪胎模型、懸架模型、轉(zhuǎn)向模型、制動(dòng)模型以及基于ASM 的駕駛員模型等。所有模型均提供MATLAB/Simulink 接口,可實(shí)現(xiàn)車輛模型與場(chǎng)景模型、傳感器模型和控制模型的集成[11]。
仿真的場(chǎng)景模型、車輛模型和傳感器模型在ASM中搭建,控制模型在Simulink 環(huán)境下搭建。車輛模型向控制模型輸入本車速度、加速度、方向盤(pán)轉(zhuǎn)角、油門及制動(dòng)踏板開(kāi)度等車輛狀態(tài)信息;傳感器模型根據(jù)自身設(shè)定的探測(cè)范圍,從場(chǎng)景模型中提取其它物體與本車的相對(duì)距離、相對(duì)速度、相對(duì)角度等目標(biāo)信息并輸入到控制模型中;控制模型將根據(jù)上述輸入信息判斷是否激活自動(dòng)緊急制動(dòng)(AEB)功能并向車輛模型輸出期望制動(dòng)減速度,最終形成系統(tǒng)閉環(huán),如圖1 所示。
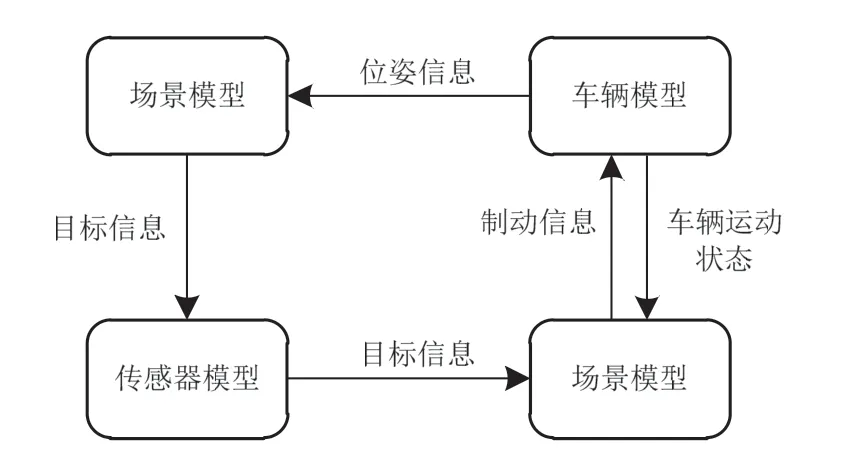
圖1 AEB 閉環(huán)仿真測(cè)試系統(tǒng)
1.2 場(chǎng)景模型
自動(dòng)駕駛場(chǎng)景是自動(dòng)駕駛汽車行駛場(chǎng)合與駕駛情景的有機(jī)組合,由靜態(tài)場(chǎng)景和動(dòng)態(tài)場(chǎng)景2 部分構(gòu)成。其中靜態(tài)場(chǎng)景由具備靜態(tài)特征的道路、交通設(shè)施、天氣、光照等組成;動(dòng)態(tài)場(chǎng)景由具備動(dòng)態(tài)特征的交通參與者組成[12]。
靜態(tài)場(chǎng)景根據(jù)需求的道路設(shè)施要素進(jìn)行搭建,具體包括路網(wǎng)拓?fù)浣Y(jié)構(gòu)、道路幾何特征、道路表面材質(zhì)、車道線、路面標(biāo)識(shí)、交通燈牌、街邊建筑等,組合上述要素,來(lái)形成道路狀況、道路周圍環(huán)境、道路曲率半徑等靜態(tài)場(chǎng)景。
在搭建好的靜態(tài)場(chǎng)景基礎(chǔ)上,布置交通參與者,并設(shè)置其初始狀態(tài),如位置、角度、速度等;之后設(shè)置各交通參與者的交互動(dòng)態(tài),賦予其滿足測(cè)試場(chǎng)景要求的行為能力,如制動(dòng)、加速、轉(zhuǎn)向、變道等。
1.3 車輛模型
1.3.1 車輛模型搭建
本文以ASM 的13 自由度車輛模型為基礎(chǔ),根據(jù)被測(cè)車輛的各項(xiàng)整車性能參數(shù),來(lái)搭建高精度車輛動(dòng)力學(xué)模型,可模擬各種工況下車輛的動(dòng)態(tài)響應(yīng)。車輛輪胎規(guī)格為215/55 R18,其它基本參數(shù)如表1 所示。
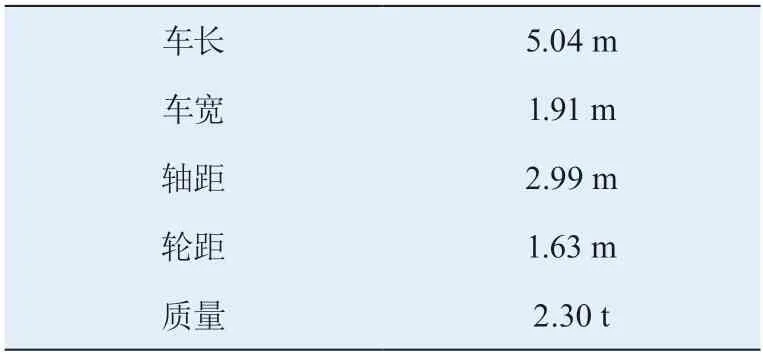
表1 車輛基本參數(shù)
1.3.2 制動(dòng)模型
ASM 車輛模型中的制動(dòng)模型為ESP 制動(dòng)液壓系統(tǒng)模型,由制動(dòng)主缸和兩條獨(dú)立制動(dòng)回路組成,制動(dòng)回路系統(tǒng)計(jì)算每個(gè)制動(dòng)輪缸中的壓力。制動(dòng)模型無(wú)法直接接收制動(dòng)減速度請(qǐng)求,因此需建立減速度與制動(dòng)主缸壓力的對(duì)應(yīng)關(guān)系。在未進(jìn)行實(shí)車試驗(yàn)之前,先基于車輛模型建立車速-減速度-制動(dòng)主缸壓力的三維查詢表,如圖2 所示。
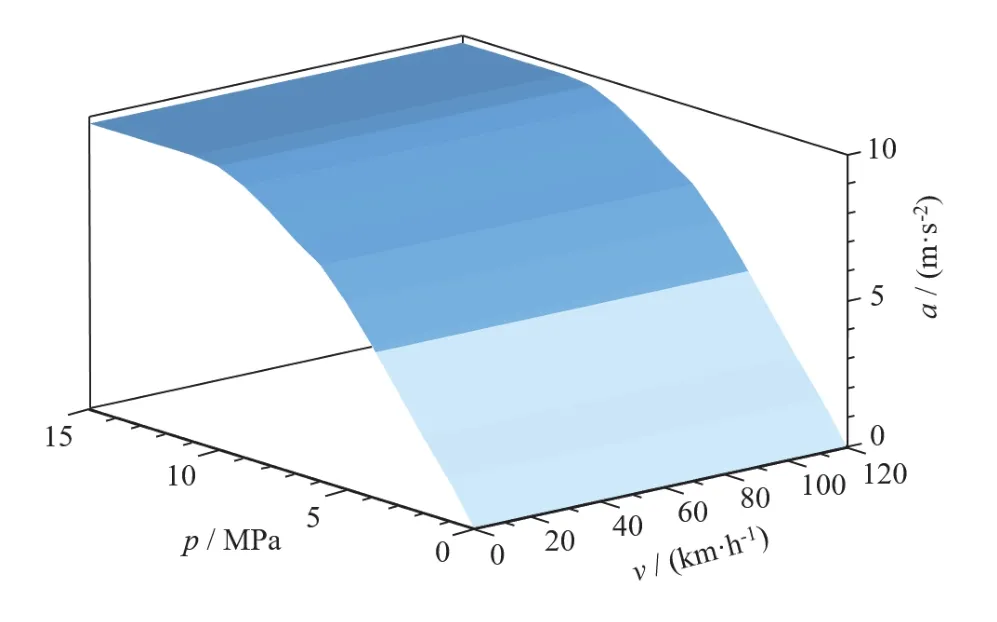
圖2 車速-減速度-制動(dòng)主缸壓力查詢表
實(shí)際應(yīng)用時(shí),通過(guò)反向查表方式,將自動(dòng)緊急制動(dòng)(AEB)功能激活時(shí)的期望減速度轉(zhuǎn)換為制動(dòng)主缸壓力,輸入到模型的制動(dòng)主缸中,實(shí)現(xiàn)仿真測(cè)試閉環(huán)控制。
1.3.3 車輛模型集成
為將車輛模型嵌入到閉環(huán)仿真測(cè)試系統(tǒng)中,需要在Simulink 環(huán)境下,將車輛的位置、角度、輪胎與路面接觸點(diǎn)的高度等信息輸入到場(chǎng)景模型;同時(shí)將車速、方向盤(pán)轉(zhuǎn)角、油門及制動(dòng)踏板開(kāi)度等信息輸入到控制模型,實(shí)現(xiàn)車輛模型集成。
1.4 傳感器模型
1.4.1 傳感器模型選擇
激活自動(dòng)緊急制動(dòng)(AEB)功能需要車輛搭載傳感器并探測(cè)周邊環(huán)境信息,同時(shí)將環(huán)境信息輸入到控制模型中進(jìn)行決策。傳感器模型的選擇應(yīng)兼具準(zhǔn)確性、實(shí)時(shí)性和魯棒性3 方面的技術(shù)特點(diǎn)。準(zhǔn)確性指?jìng)鞲衅髂P湍苡行崛√綔y(cè)范圍內(nèi)的物體信息;實(shí)時(shí)性指數(shù)據(jù)處理必須與車輛模型解算保持同步;魯棒性指在極端場(chǎng)景下傳感器模型內(nèi)部要保持穩(wěn)定。
目前傳感器模型主要分為3 種:第1 種為物理級(jí)傳感器模型,可直接仿真?zhèn)鞲衅髂軌蚪邮盏降脑夹盘?hào),如光線、電磁波、超聲波等;第2 種為信號(hào)級(jí)傳感器模型,直接仿真控制電控嵌入式系統(tǒng)中的數(shù)字處理芯片的輸入單元;第3 種為真值級(jí)傳感器模型,即直接輸出傳感器模型探測(cè)范圍內(nèi)的目標(biāo)真值信息[13]。本文選擇真值級(jí)傳感器模型。
1.4.2 傳感器模型搭建
搭建真值級(jí)傳感器模型,需要確認(rèn)試驗(yàn)車輛所搭載傳感器的探測(cè)距離、水平視場(chǎng)角、垂直視場(chǎng)角、盲區(qū)距離等外特性模型參數(shù),依照參數(shù)搭建模型。本文中試驗(yàn)車輛采用毫米波雷達(dá)傳感器,根據(jù)實(shí)車搭載的毫米波雷達(dá)參數(shù),設(shè)定傳感器模型的探測(cè)距離為210 m,水平視場(chǎng)角為±45°,垂直視場(chǎng)角為±8°,盲區(qū)距離為0.5 m。
1.5 AEB 控制模型
本AEB 系統(tǒng)采用毫米波雷達(dá)感知前方目標(biāo)車輛,根據(jù)目標(biāo)的速度、目標(biāo)與本車的距離以及本車車速等參數(shù),綜合判斷碰撞風(fēng)險(xiǎn)。當(dāng)判定存在碰撞風(fēng)險(xiǎn)時(shí),駕駛員未采取轉(zhuǎn)向、制動(dòng)等措施避免碰撞,則激活A(yù)EB功能。AEB 功能激活后,控制模型將向車身電子穩(wěn)定系統(tǒng)(electronic stability control,ESC)發(fā)送-8 m/s2的減速度請(qǐng)求;ESC 收到減速度請(qǐng)求并執(zhí)行制動(dòng)響應(yīng),車輛剎停后,ESC 保壓3 s 后AEB 退出。
2 測(cè)試工況
選取3 個(gè)測(cè)試工況,來(lái)進(jìn)行AEB 功能仿真測(cè)試與實(shí)車試驗(yàn)結(jié)果的對(duì)比分析。本車以不同車速勻速行駛,目標(biāo)車在本車前方靜止,兩者中心線對(duì)齊,起始距離為50 m,工況1、工況2、工況3 的車速分別為:10、20、25 km/h。
圖3 所示為測(cè)試場(chǎng)景,圖4 所示為仿真測(cè)試過(guò)程。
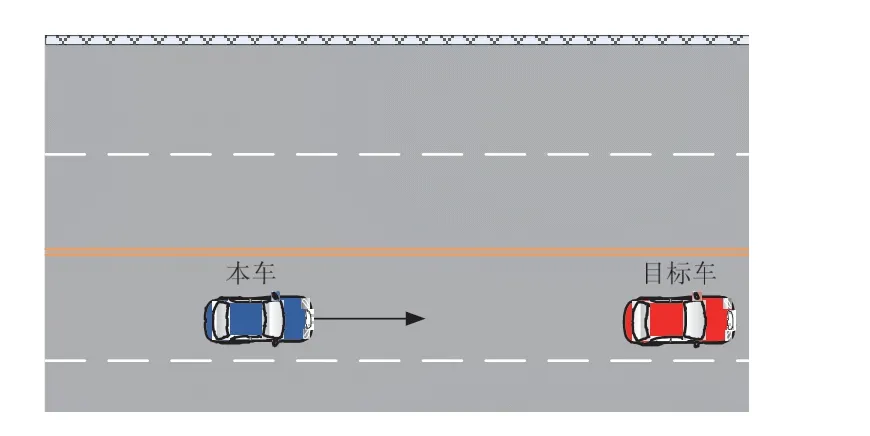
圖3 測(cè)試場(chǎng)景
3 實(shí)車試驗(yàn)
在海南熱帶汽車試驗(yàn)場(chǎng),進(jìn)行3 種工況的AEB 實(shí)車試驗(yàn),試驗(yàn)過(guò)程與第2 章中仿真測(cè)試保持一致,如圖5 所示。實(shí)車試驗(yàn)場(chǎng)地的車道長(zhǎng)度為1.8 km,車道寬度為3.75 m,試驗(yàn)車輛搭載RT Range 高精度慣性導(dǎo)航系統(tǒng),能夠準(zhǔn)確獲取試驗(yàn)車輛和目標(biāo)車輛之間的相對(duì)距離。

圖5 AEB 實(shí)車試驗(yàn)
表2 為AEB 仿真與實(shí)車試驗(yàn)的結(jié)果對(duì)比,其中TTC (time to collision,預(yù)計(jì)碰撞時(shí)間)為AEB 功能激活時(shí)本車與目標(biāo)車的預(yù)計(jì)碰撞時(shí)間;最大減速度-amax為本車從AEB 功能激活到本車停穩(wěn)時(shí)間內(nèi)的最大減速度;平均減速度-aavg為AEB 功能激活到本車停穩(wěn)時(shí)間內(nèi)的平均減速度;最小車間距d為本車停穩(wěn)后本車與目標(biāo)車的縱向距離。
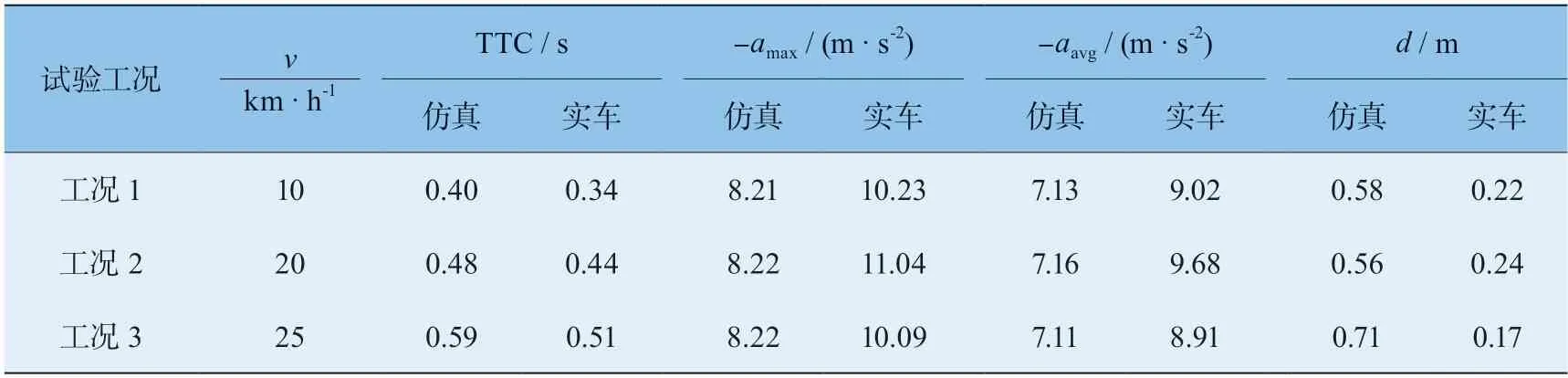
表2 AEB 仿真與實(shí)車試驗(yàn)結(jié)果
4 制動(dòng)模型修正
由表1 可知:仿真測(cè)試與實(shí)車試驗(yàn)的AEB 激活TTC 的平均誤差為60 ms;最大減速度的平均誤差為2.24 m/s2;平均減速度的平均誤差為2.07 m/s2;最小車間距的平均誤差為0.41m。仿真與實(shí)車試驗(yàn)相比,AEB 激活TTC 的誤差較小,說(shuō)明AEB 激活時(shí)仿真和實(shí)車的車速、車間距等狀態(tài)基本相同,AEB 控制算法在仿真和實(shí)車試驗(yàn)中的表現(xiàn)可視為一致。在AEB 激活時(shí)狀態(tài)基本無(wú)誤差的情況下,導(dǎo)致最大減速度、平均減速度和最小車間距等指標(biāo)出現(xiàn)較大誤差的主要原因在于系統(tǒng)的制動(dòng)執(zhí)行模塊,即仿真車輛模型和實(shí)車的制動(dòng)響應(yīng)存在較大差異。
為減少仿真車輛模型和實(shí)車的制動(dòng)響應(yīng)誤差,本文運(yùn)用實(shí)車試驗(yàn)數(shù)據(jù)對(duì)車輛模型的制動(dòng)系統(tǒng)進(jìn)行修正。在仿真和實(shí)車試驗(yàn)中分別執(zhí)行相同的制動(dòng)工況是:本車以25 km/h 勻速行駛,車速穩(wěn)定后向車身電子穩(wěn)定系統(tǒng)(ESC)發(fā)送8 m/s2的減速度請(qǐng)求,對(duì)比仿真與實(shí)車的制動(dòng)響應(yīng)曲線,見(jiàn)圖6。
如圖6 所示,車輛模型與實(shí)車相比,其制動(dòng)系統(tǒng)的超調(diào)小,響應(yīng)時(shí)間和峰值時(shí)間較短,二者制動(dòng)響應(yīng)過(guò)程存在較大誤差。針對(duì)實(shí)車的制動(dòng)響應(yīng)特點(diǎn),車輛模型的制動(dòng)系統(tǒng)需要增加對(duì)應(yīng)的修正模型,包括純延遲環(huán)節(jié)、慣性延遲環(huán)節(jié)和增益環(huán)節(jié),并確定各環(huán)節(jié)的參數(shù),以保證車輛模型的制動(dòng)響應(yīng)精度接近實(shí)車。
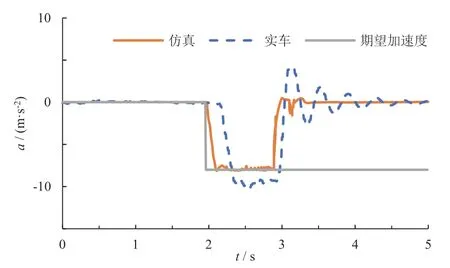
圖6 仿真與實(shí)車制動(dòng)響應(yīng)對(duì)比
精度的定義為
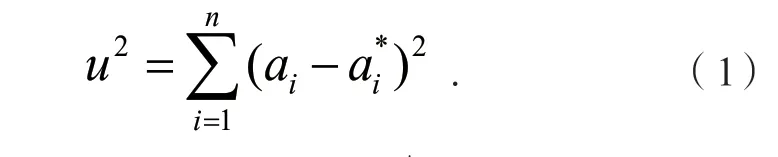
式中:ai為實(shí)車試驗(yàn)中的減速度,為仿真測(cè)試中的減速度。制動(dòng)模型修正前,u2=1 851.95。制動(dòng)系統(tǒng)修正流程見(jiàn)圖7。
如圖7 所示,控制模型輸出期望減速度,制動(dòng)模型將輸入的期望減速度轉(zhuǎn)換為車輛模型可執(zhí)行的制動(dòng)主缸壓力或輪缸壓力,再經(jīng)過(guò)增益環(huán)節(jié)、純延遲環(huán)節(jié)和慣性延遲環(huán)節(jié)的修正后輸入到車輛模型中,計(jì)算得到仿真減速度。通過(guò)反復(fù)辨識(shí)增益環(huán)節(jié)、純延遲環(huán)節(jié)和慣性延遲環(huán)節(jié)的參數(shù),使制動(dòng)模型修正到滿足精度要求。
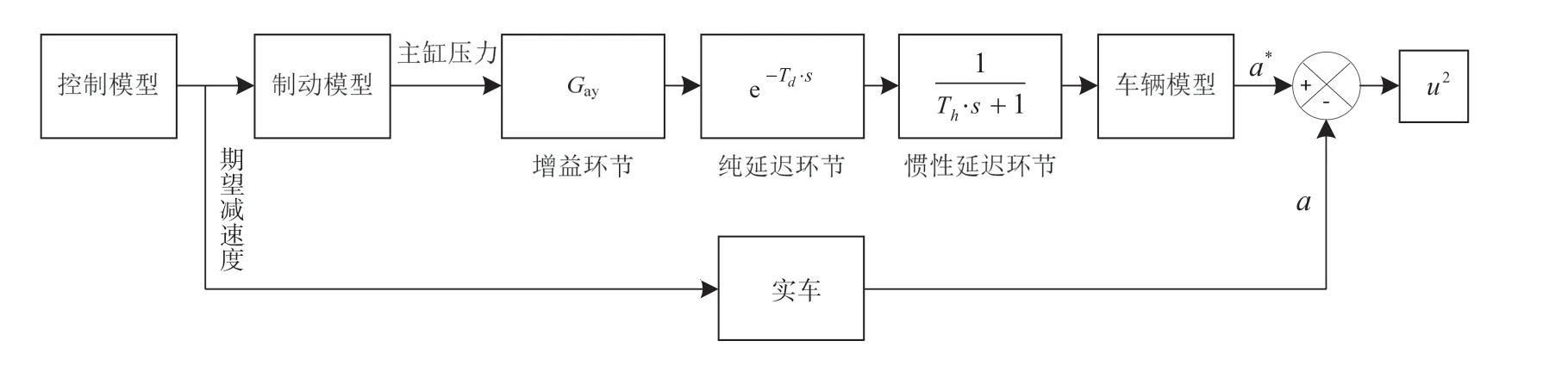
圖7 制動(dòng)系統(tǒng)修正流程
經(jīng)過(guò)系統(tǒng)辨識(shí),純延遲環(huán)節(jié)參數(shù)Td=0.17,慣性延遲環(huán)節(jié)參數(shù)Th=0.25,增益環(huán)節(jié)參數(shù)Gay=1.25。
圖8 所示為修正制動(dòng)模型后仿真與實(shí)車的制動(dòng)響應(yīng)對(duì)比,制動(dòng)系統(tǒng)的響應(yīng)精度得到較大提升。制動(dòng)模型修正后,u2=304.14。
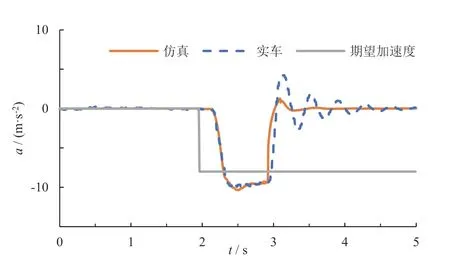
圖8 制動(dòng)模型修正后仿真與實(shí)車制動(dòng)響應(yīng)對(duì)比
5 模型修正后的仿真結(jié)果
圖9(見(jiàn)下一頁(yè))為制動(dòng)模型修正后,在3 種工況下仿真測(cè)試與實(shí)車試驗(yàn)的數(shù)據(jù)曲線對(duì)比。
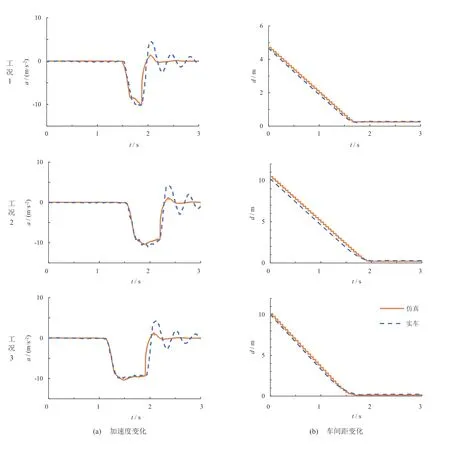
圖9 3 種工況仿真測(cè)試與實(shí)車試驗(yàn)對(duì)比
表3(見(jiàn)下一頁(yè))為制動(dòng)模型修正后仿真與實(shí)車試驗(yàn)的結(jié)果對(duì)比。結(jié)合3 個(gè)測(cè)試工況,仿真與實(shí)車試驗(yàn)的AEB 激活TTC 的平均誤差為70 ms;最大減速度的平均誤差為0.34 m/s2;平均減速度的平均誤差為0.16 m/s2;最小車間距的平均誤差為4 cm。

表3 制動(dòng)模型修正后AEB 仿真與實(shí)車試驗(yàn)結(jié)果
由表2、3 可知:制動(dòng)模型修正后多個(gè)指標(biāo)的仿真精度得到了較大提升:與試驗(yàn)結(jié)果相比,最大減速度的平均誤差減少1.90 m/s2;平均減速度的平均誤差減少1.91 m/s2;最小車間距的平均誤差減少0.37 m。
6 結(jié)論
本文分別進(jìn)行了自動(dòng)緊急制動(dòng)(AEB)功能的仿真測(cè)試和實(shí)車試驗(yàn),并對(duì)兩者的結(jié)果進(jìn)行對(duì)比分析,增加由純延遲環(huán)節(jié)、慣性延遲環(huán)節(jié)和增益環(huán)節(jié)組成的修正模型,對(duì)車輛制動(dòng)模型進(jìn)行修正。模型修正后的試驗(yàn)結(jié)果表明:通過(guò)增加修正模型,仿真測(cè)試系統(tǒng)能夠大幅提升測(cè)試精度,對(duì)AEB 功能進(jìn)行準(zhǔn)確有效的驗(yàn)證。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
