消除水平度誤差對雷達俯仰角精度影響的方法研究
2022-10-12 11:38:18呂紅娟郝坤鵬陳明哲姬淑娟
火控雷達技術 2022年3期
關鍵詞:測量
呂紅娟 郝坤鵬 陳明哲 姬淑娟
(1.西安昆侖工業(集團)有限責任公司 西安 710043;2.西安電子工程研究所 西安 710100)
0 引言
影響武器系統射擊精度的誤差源按類型可分為:武器系統誤差、人員誤差、條件誤差,其中武器系統誤差包括:制造誤差、原理誤差、調整校正誤差和工作誤差。為實現武器系統對來襲目標的有效毀傷,研制過程中對遠離誤差按照系統精度指標分解至各單機設備,對關鍵設備跟蹤雷達的角度、速度、距離的測量精度均有明確的指標要求。在樣機試制時通常通過系統檢飛試驗,檢查跟蹤雷達各項測量精度(即雷達跟蹤精度)是否滿足指標要求。
某車載火炮武器系統集探測、跟蹤、火控解算、火力打擊及作戰/運載平臺于一體,可獨立完成低空近程防空反導的作戰任務。本文針對該車載火炮武器系統在某次檢飛試驗中兩個架次的跟蹤精度評定中出現的“跟蹤雷達俯仰測角精度超差”問題,進行了深入排查及原因分析,將問題原因定位為:在系統方位運轉時,雷達俯仰零位與絕對水平度間誤差超差。雷達俯仰零位與絕對水平間的誤差屬于制造誤差范疇,在系統方位運轉時對雷達俯仰測角精度的影響無法消除,因此本文提出了精度評定時在雷達俯仰角度值中引入一種修正方法,以盡可能減小該誤差對雷達俯仰角測量精度評定的影響。
1 系統結構布局及工作原理
該車載火炮武器系統集探測、跟蹤、火控解算、火力打擊及作戰/運載平臺于一體,主要組成包括:雷達、火炮、火控計算機及拖車底盤等設備。雷達集成光電系統,兩者采用共伺服系統的方式。系統總體結構布局示意見圖1所示。
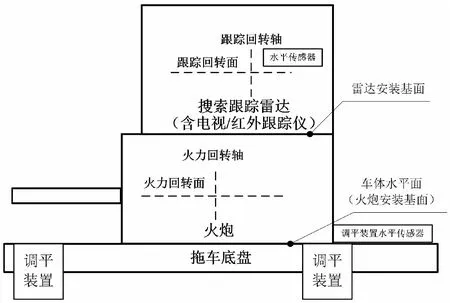
圖1 某車載火炮武器系統總體結構布局示意圖
系統作戰時,雷達完成對目標的探測、跟蹤,提供目標航跡數據及實時高精度的目標現在點坐標信息;火控計算機對現在點坐標信息進行坐標轉化完成射擊諸元解算,并控制火炮隨動運轉指向未來點,雷達伺服在火炮隨動運轉基礎上進行復合運動。作戰平臺水平度由拖車底盤上的調平裝置保證。
當調平裝置傳感器采集的車體水平面(火炮安裝面)向、向不大于2′時,即可認為雷達安裝面水平度滿足水平度要求,此種狀態下,進行雷達俯仰零位與絕對水平的標定。標定完成,在系統方位運轉工況下,車體調平水平度、火炮回轉面水平度及雷達回轉面水平度疊加后引起雷達俯仰零位與絕對水平間的誤差依然存在且動態變化。設計時在雷達天線座內安裝了一個水平度傳感器用于對其回轉平面水平度進行測量。
2 雷達跟蹤精度評定基本方法
雷達跟蹤精度是指雷達跟蹤目標時,測量值與目標真值之差的統計值。通常樣機裝調完成后通過檢飛試驗檢查雷達各項跟蹤精度的滿足情況,從評定角度出發,把雷達測量值與真值的一次差作為測量系統誤差;把各種情況產生的雷達誤差取均方根值,作為測量隨機誤差。試驗時選取合適的目標機按照系統作戰典型航路進行等速直線飛行(獲取飛行過程中位置數據作為真值),系統跟飛過程中對各設備間交互數據進行錄取,事后對雷達測量數據及真值數據進行處理獲取雷達測量精度。
3 雷達俯仰角系統精度超差原因分析
3.1 問題概述
檢飛試驗兩個架次該車載火炮武器系統進行處于同一位置,兩個架次目標航向一致。且每個架次試驗前進行車體調平,確保水平度滿足向、向均不大于2′。統計兩個架次6個進入雷達俯仰角精度結果見表1所示。
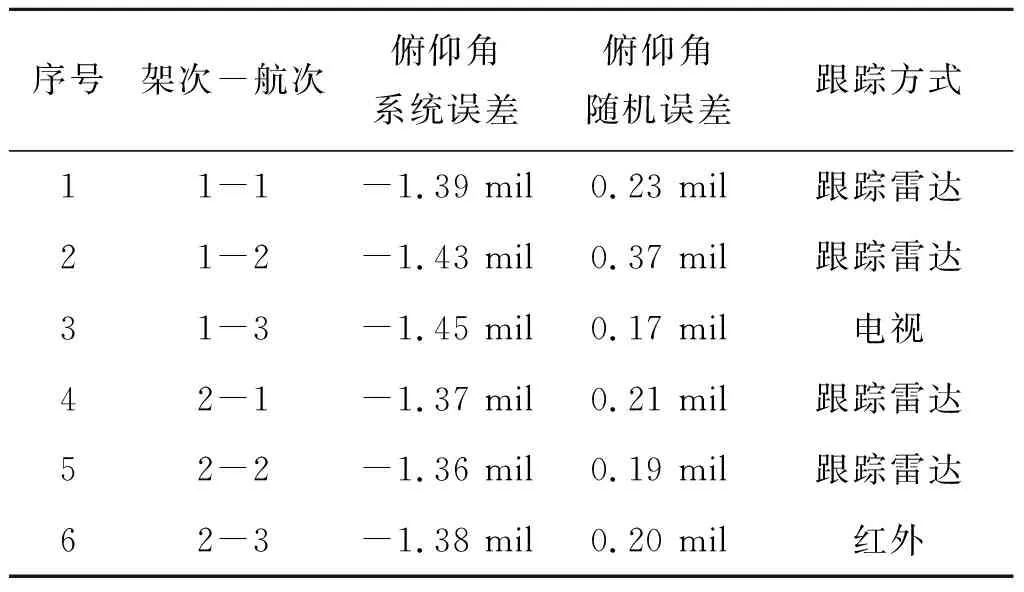
表1 某次檢飛雷達俯仰角精度結果
從表1中看出:兩個架次6個進入航次傳感器(跟蹤雷達、電視/紅外)俯仰角系統誤差均在-1.5 mrad左右,超出了不大于0.8 mrad的指標要求;6個進入航次傳感器(跟蹤雷達、電視/紅外)俯仰角隨機誤差均滿足指標要求。
3.2 問題排查及原因分析
根據雷達工作原理可知,影響跟蹤雷達測角、測距精度的因素很多。主要有:
1)目標誤差類:包括目標閃爍、動態滯后誤差;
2)雷達誤差類:包括接收機噪聲、相移誤差、幅度不一致誤差、耦合誤差、零飄誤差、發射脈沖前沿抖動、伺服噪聲等;
3)轉換誤差類:包括量化誤差、標定誤差等;
4)傳播誤差:包括多路徑誤差、雜波剩余誤差等。
根據第一章描述該火炮系統的系統結構布局及工作原理,綜合分析認為本次引起雷達俯仰測角精度系統誤差超差的原因可能為以下3個方面:
1)傳感器跟蹤角誤差;
2)雷達光電軸軸系不一致;
3)雷達俯仰零位與絕對水平間的誤差。
3.2.1 傳感器跟蹤角誤差
傳感器跟蹤誤差即目標偏離電軸、光軸的誤差。雷達穩定跟蹤時視頻畫面見圖2所示。

圖2 雷達穩定跟蹤的視頻畫面
從圖2畫面上可看出:雷達穩定跟蹤時視頻畫面上目標始終處于十字線中線,俯仰上未存在明顯偏差,因此認為此項不是引起俯仰角系統誤差超差的原因。
3.2.2 軸系不一致誤差
1)從表1各航次的精度結果可以看出:雷達俯仰角系統誤差均在負向1.5 mrad±0.1 mrad,誤差的一致性非常好;
2)從雷達和電視/紅外跟蹤精度結果對比可以看出:跟蹤雷達電軸、電視光軸和紅外光軸的一致性非常好,各軸之間誤差小于0.1 mrad。
因此認為此項不是引起俯仰角系統誤差超差的原因。
3.2.3 雷達俯仰零位與絕對水平零位間的誤差
首先進行車體調平,確保車體水平度滿足向、向不大于2′,檢查跟蹤雷達俯仰零位與絕對水平間的誤差。
3.2.3.1 采用經緯儀與雷達對瞄的方法檢查跟蹤雷達俯仰零位與絕對水平間的誤差,并分析誤差規律。
具體方法為:
1)根據系統工作狀態,跟蹤目標時,火炮和跟蹤雷達指向一致,按照檢飛航線方位角變化區間(在從目標進入方位角到航捷點方位角)選取火炮七個典型位置;
2)將經緯儀架設在距離火炮大于100 m遠的地方并調平,將火炮指向調整為0 mil、500 mil、1000 mil、1500 mil、2000 mil、2500 mil、3000 mil七個典型位置上,用經緯儀與跟蹤雷達互瞄,讀取跟蹤雷達俯仰架位及經緯儀水平度值;
3)將雷達俯仰架位與經緯儀讀數取反后做差求取跟蹤雷達俯仰零位與絕對水平的誤差。測試數據及誤差計算結果見表2所示。
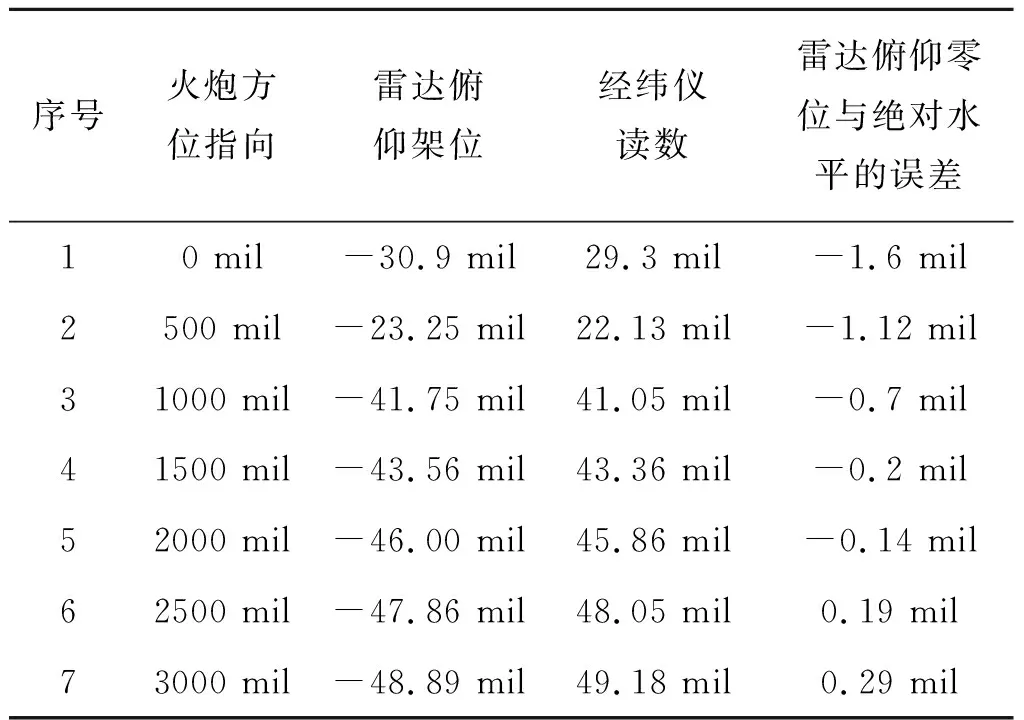
表2 經緯儀與雷達對瞄計算誤差結果
從表2測試數據可看出:在火炮指向0 mil時跟蹤雷達俯仰零位與絕對水平的誤差最大,為-1.6 mil,且誤差大小及方向均與表1中6個架次的俯仰角系統誤差大小及方向相吻合。
3.2.3.2 讀取跟蹤雷達天線座內的水平度傳感器數據,計算跟蹤雷達俯仰零位與絕對水平間的誤差,并分析誤差規律。
具體方法為:
1)分別將火炮指向為0 mil、500 mil、1000 mil、1500 mil、2000 mil、2500 mil、3000 mil七個典型位置,讀取雷達天線與火炮同向(0 mil)、雷達天線與火炮反向(3000 mil)兩個位置時天線座內的水平度傳感器數據;
2)計算雷達回轉平面水平度值,測試數據及誤差計算結果見表3所示。

表3 水平度傳感器數據計算誤差結果
從表3中測試數據可看出:水平度傳感器數據計算的雷達俯仰零位與絕對水平誤差與表2中雷達與經緯儀對瞄計算的誤差數值基本一致,誤差方向一致。
兩組試驗方法誤差對比見圖3所示。
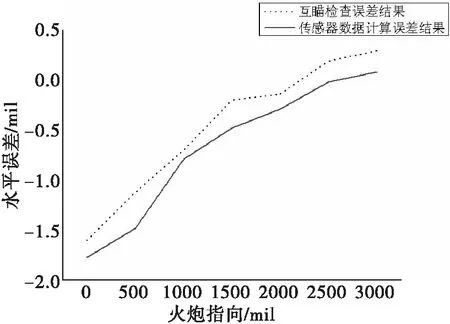
圖3 兩組試驗計算誤差對比
從表1、表2測試數據及圖3誤差曲線可以看出:雷達俯仰零位與絕對水平的誤差隨火炮指向不同而不同,在車載火炮武器系統作戰過程時,火炮及雷達處于方位隨動運轉狀態下,該誤差亦為動態變化的。
3.3 解決措施及驗證
3.3.1 解決措施
為了消除車載火炮武器系統作戰過程火炮及雷達隨動運轉工況下,動態變化的雷達俯仰零位與絕對水平間誤差對雷達俯仰角測量精度的影響,將天線座內水平傳感器發送的向、向水平度數據,修正至目標空間位置量(、、)上。
3.3.2 仿真驗證
對表1中6個航次的雷達測量數據及傳感器的水平度數據進行數據處理,重新進行精度評定,驗證補償方法的可行性。
具體方法為:
1)按照檢飛試驗時火炮架位運轉范圍,靜態測量火炮方位指向0 mil和1500 mil時雷達俯仰零位與絕對水平零位的誤差。
2)火炮指向0 mil,分別讀取跟蹤雷達在火炮0 mil及3000 mil兩種狀態下的水平傳感器的數值,兩值相減除以2,即為火炮0 mil時跟蹤雷達相對大地的水平度;火炮指向1500 mil,分別讀取跟蹤雷達在火炮1500 mil及4500 mil兩種狀態下的水平傳感器的數值,兩值相減除以2,即為火炮90°時跟雷達相對大地的水平度。
3)數據處理:按照公式(×cos方位角+×sin方位角)計算對應方位角度下的誤差值,并將該誤差值修正在雷達俯仰角測量值上。
4)重新進行精度評定,評定結果見表4所示。
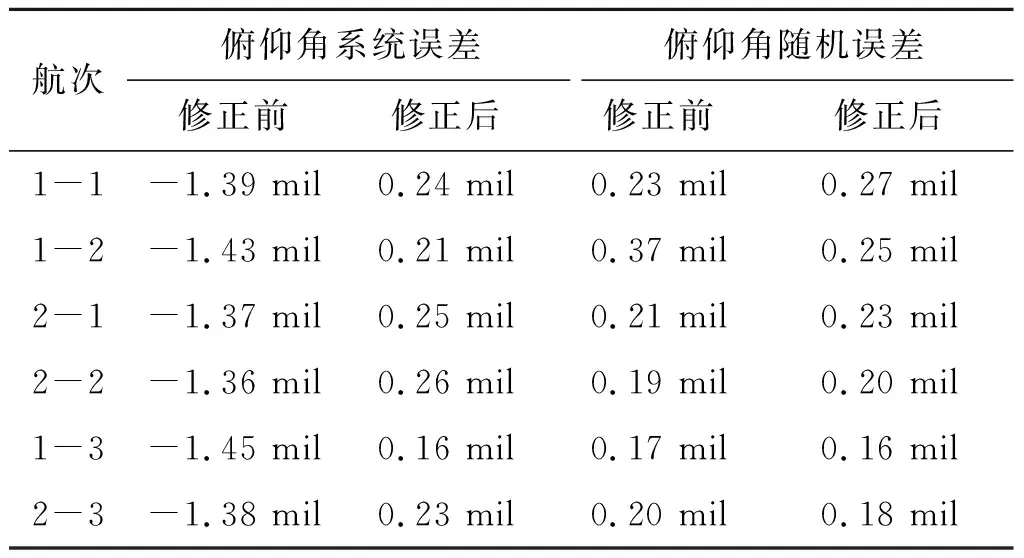
表4 誤差修正后俯仰角精度
各航次修正前、后誤差曲線對比見圖4至圖7所示。
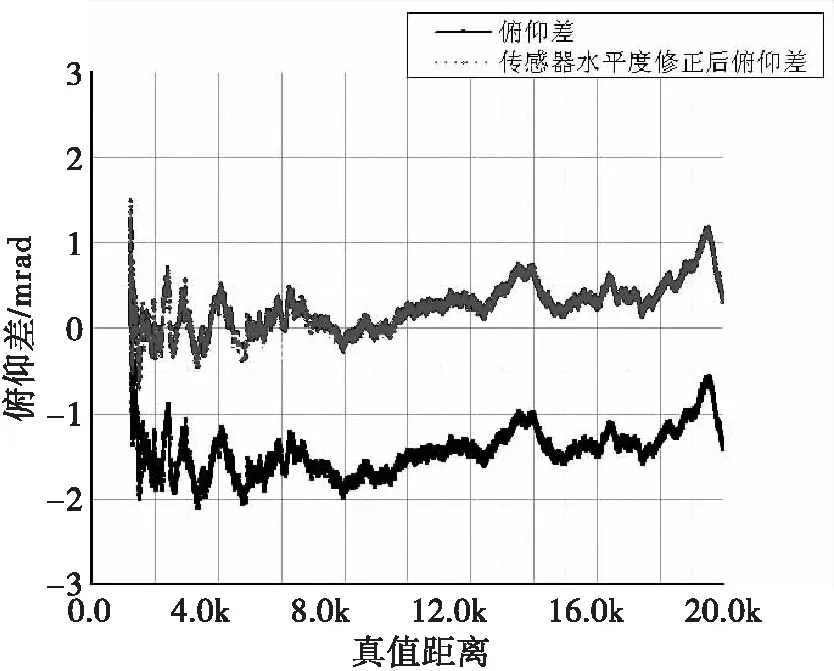
圖4 1-1航次修正前后俯仰誤差曲線對比
圖5 1-2航次修正前后俯仰誤差曲線對比
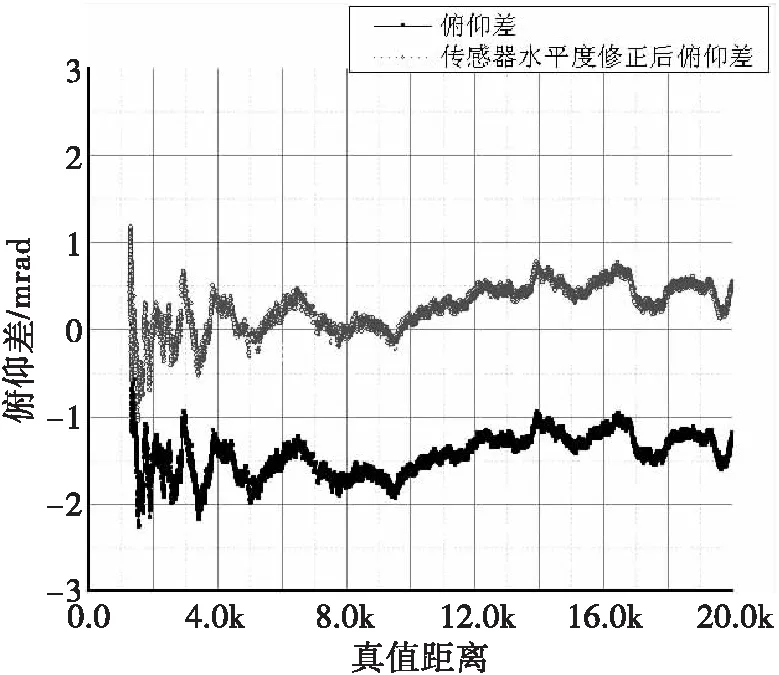
圖6 2-1航次修正前后俯仰誤差曲線對比
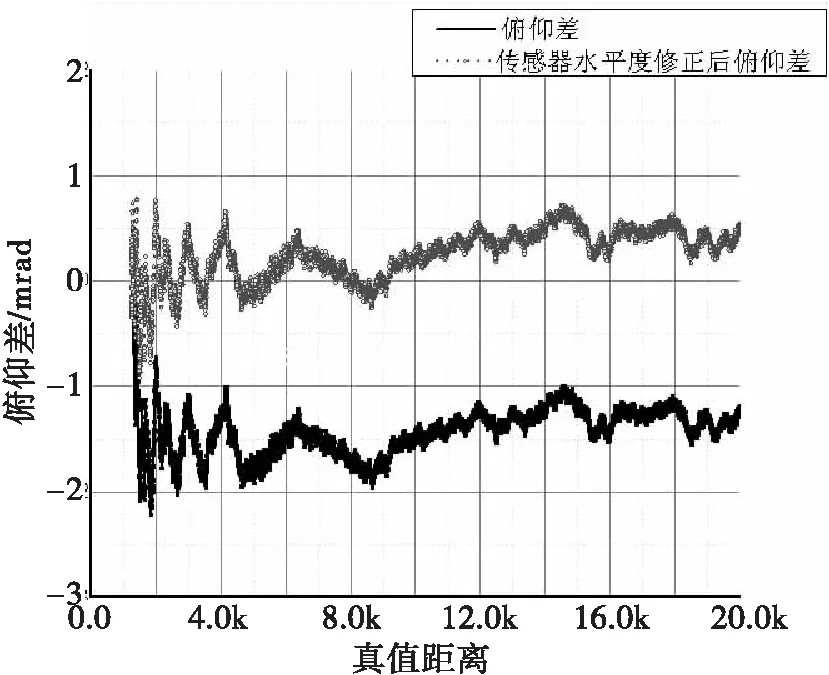
圖7 2-2航次修正前后俯仰誤差曲線對比
從表4、圖4至圖7可以看出:用水平傳感器數據對雷達俯仰角測量值進行補償后,跟蹤雷達俯仰角系統誤差及隨機誤差均不大于0.8 mil,滿足指標要求。
3.3.3 檢飛驗證
后續檢飛試驗中,進行跟蹤雷達測量精度評定,俯仰角精度未再出現超差現象。
4 結束語
通過采用前期檢飛數據進行的仿真驗證及后續檢飛試驗結果表明:
在進行雷達跟蹤精度評定時,通過將安裝在雷達天線座內的水平度傳感器采集到的雷達回轉平面向、向水平度數據修正至雷達輸出的目標空間位置量(、、)上,以減小雷達俯仰零位與絕對水平誤差對雷達俯仰角測量精度影響的方法是可行的。
該修正方法對其他雷達精度評定、誤差分析、設計有一定的借鑒作用。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00