利用傾斜攝影測量的農(nóng)村房屋信息調(diào)查
2022-10-13 09:13:54張靜茹邱云飛方立沈慧芳周樹東
遙感信息 2022年4期
關(guān)鍵詞:信息
張靜茹,邱云飛,方立,沈慧芳,周樹東
(1.遼寧工程技術(shù)大學 軟件學院,遼寧 葫蘆島 125105;2.中國科學院海西研究院 泉州裝備制造研究所,福建 泉州 362216)
0 引言
農(nóng)村房屋信息作為反映土地資源利用和農(nóng)民生產(chǎn)生活狀況的基本數(shù)據(jù),對數(shù)字化鄉(xiāng)村建設(shè)、抗震性能分析、生態(tài)環(huán)境監(jiān)測以及耕地保護等方面具有重大的價值和作用[1]。受地形地貌的影響,農(nóng)村房屋具有坐落無規(guī)律、擴建翻新速度快、產(chǎn)權(quán)結(jié)構(gòu)復(fù)雜等特性,造成了傳統(tǒng)實地勘測測量難度大、測繪周期長、成本投入高、安全隱患多、房屋信息數(shù)據(jù)更新不及時以及測量與審批結(jié)果不符等亟待解決的問題[2]。因此,開發(fā)一套高精度、低成本、短周期的農(nóng)村房屋信息調(diào)查方法具有非常重要的研究意義。
近年來,傾斜攝影測量技術(shù)迅猛發(fā)展,該技術(shù)能夠全方位、多角度地獲取地面物體真實的三維信息,并且成本低廉、數(shù)據(jù)獲取便捷,在自然資源更新監(jiān)測、城市建模管理等諸多領(lǐng)域都得到了廣泛的應(yīng)用[3-4],從傾斜攝影測量影像匹配點云中提取建筑物信息也成為研究熱點[5-8]。但是,影像匹配點云中存在大量與房屋粘連的非建筑物點云,這些點云將直接影響建筑物點云提取效果,使得房屋信息計算精度低。為了減小非建筑物點的影響,戴玉成[9]在通過高程濾波濾除大量低矮點的基礎(chǔ)上,利用植被反射波普特性訓練機器學習模型對高大植被點進行剔除。此方法利用成熟模型可以快速、高效地進行植被點檢測,但檢測的結(jié)果依賴于模型的優(yōu)劣,并且需要投入大量成本對數(shù)據(jù)進行標注。鄧飛等[10]在去除地面點云后,通過對植被、建筑物點的灰度分布范圍進行訓練,使用單波段灰度值進行閾值分割剔除植被點云。該方法雖然能快速地剔除植被點云,但易將建筑物點云標記為植被點錯誤去除。余和順等[11]根據(jù)過綠指數(shù)檢測出點云場景中的黃綠色、綠色的點,并依據(jù)植被密集成塊特性對顏色分類結(jié)果進行糾正,在去除植被點時能夠有效保留部分建筑物且無需模型訓練。但是,該方法使用單一植被指數(shù)易將建筑物點錯誤濾除,并且對于場景中存在的非綠色植被點無法有效檢測。
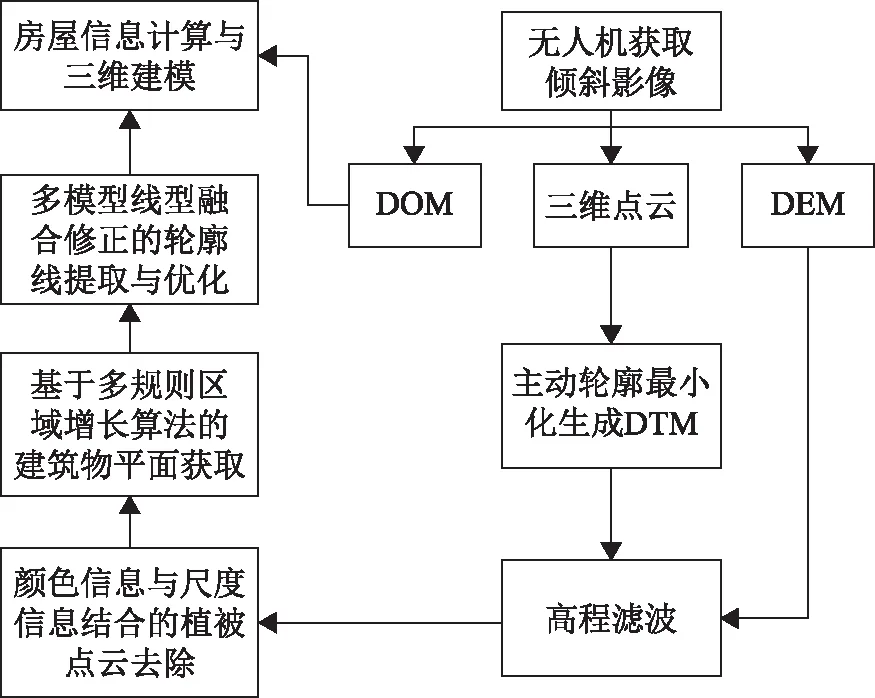
圖1 農(nóng)村房屋信息自動化調(diào)查的總體流程圖
基于以上分析,本文面向傾斜攝影測量數(shù)據(jù)匹配點云,提出了一種點云顏色與尺度信息相結(jié)合的植被點云濾波方法,并將其與現(xiàn)有成熟技術(shù)相結(jié)合,形成一套完整的農(nóng)村房屋信息自動化調(diào)查方案。如圖1所示,信息自動化調(diào)查方案共分為5個環(huán)節(jié):①無人機裝載傾斜攝影系統(tǒng)采集數(shù)據(jù),生成三維點云;②主動輪廓能量最小化算法模擬地面,生成數(shù)字地面模型(digital terrain model,DTM),利用高程信息進行高程濾波;③點云尺度與顏色相結(jié)合進行非建筑物點濾波,利用多規(guī)則區(qū)域增長算法進行平面分割;④針對不同類型房屋選取不同約束線組合提取房屋輪廓;⑤房屋信息計算。為了驗證所提出方法的可行性,本文于武漢市新洲區(qū)施廟村展開試點研究。
1 數(shù)據(jù)獲取與預(yù)處理
1.1 無人機影像獲取
研究區(qū)位于湖北省武漢市新洲區(qū)施廟村(114°79′E,30°90′N),共采集了該區(qū)域內(nèi)101宗地的162幢農(nóng)村房屋影像數(shù)據(jù)。實驗采用大疆多旋翼無人機,搭載5臺1 820萬像素的Sony WX RGB相機,從垂直和前后左右5個不同的方位視角采集影像數(shù)據(jù),圖像分辨率為4 896像素×3 672像素。表1顯示了無人機的飛行參數(shù)設(shè)置。
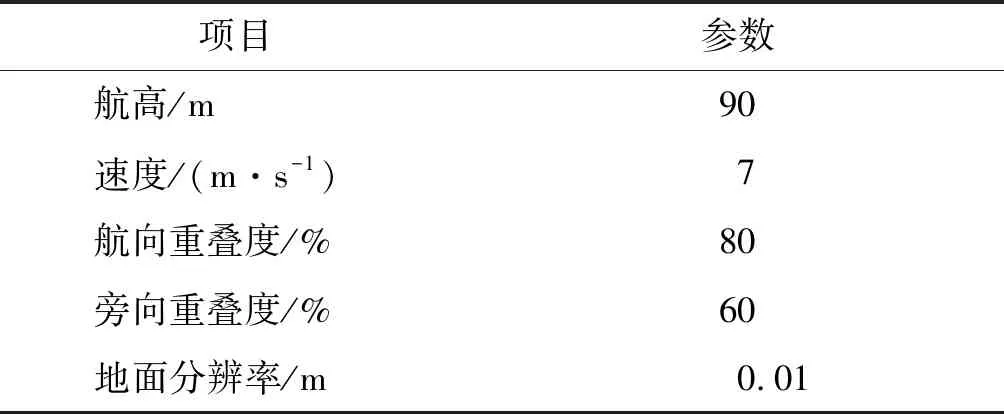
表1 實驗區(qū)域航攝技術(shù)參數(shù)
由于飛行環(huán)境、相機參數(shù)和像控點布設(shè)同樣影響影像質(zhì)量和后續(xù)處理步驟,因此,飛行選擇在光照恒定、氣流平穩(wěn)的天氣進行。在飛行過程中檢查影像清晰度以及漏測和錯位現(xiàn)象以調(diào)整相機和航攝視角。像控點布設(shè)主要為平高控制點,1 km230個控制點,此外房屋屋頂也加入一定的控制點,最大限度保證了攝影質(zhì)量。實驗所使用的計算機運行環(huán)境如表2所示。
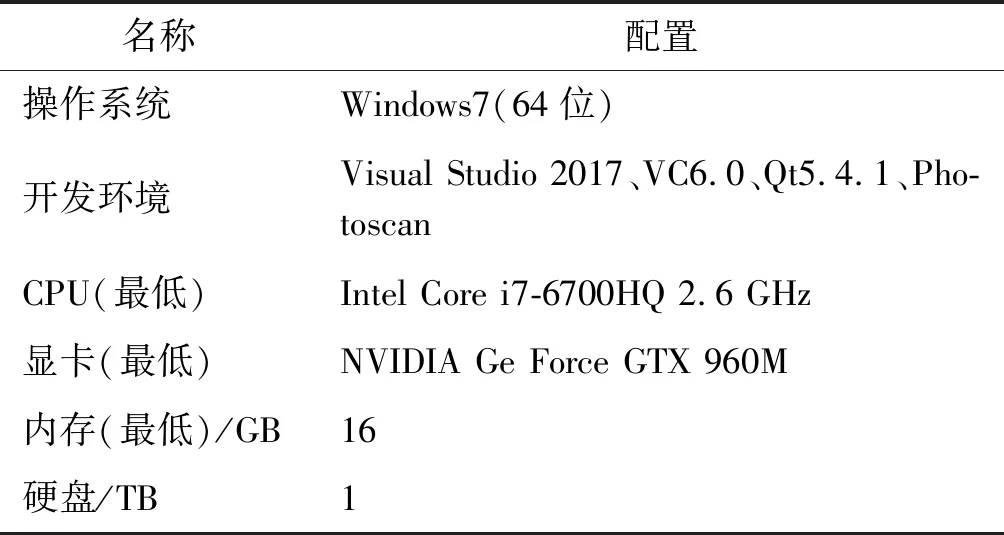
表2 計算機運行環(huán)境
1.2 影像預(yù)處理
無人機影像數(shù)據(jù)獲取后使用商用軟件包Agisoft Photoscan生成攝影測量數(shù)據(jù):密集三維點云數(shù)據(jù)圖、數(shù)字地表模型(digital surface model,DSM)和RGB真彩色航空數(shù)字正射影像圖。圖2顯示了3種攝影測量數(shù)據(jù)的輸出成果。

圖2 傾斜攝影測量輸出結(jié)果
2 研究方法
2.1 數(shù)字地面模型生成
為了獲取精確數(shù)字地面模型,采用主動輪廓能量最小化算法對地表進行模擬[12]。基本步驟如下:將高密度三維點云網(wǎng)格化,取每個網(wǎng)格中的最低點作為樣本點p,取p點的高度值得到一幅二維的高度圖像Ip。對所有的樣本構(gòu)造一個主動輪廓模型,最小化主動輪廓能量函數(shù)得到對應(yīng)的地面圖像zp。在得到DTM后,結(jié)合高程信息對點云進行閾值濾波,過濾掉高程小于閾值的點。
2.2 非建筑物點云濾波
在高程濾波后,點云之中仍然存在高大樹木、電線桿等非建筑點。為了減小非建筑物點的影響,提高建筑物點云提取準確率,提出了一種多屬性融合的非建筑物點云濾波算法,通過點云的尺度信息與顏色信息結(jié)合去除場景中存在的非建筑物點云。具體實現(xiàn)如下。
設(shè)待測點Q的鄰域點為Pi(i=1,2,3…,n),使用Q與Pi構(gòu)建協(xié)方差矩陣H,求解可得特征值λ1,λ2,λ3。其中,λ1>λ2>λ3,所對應(yīng)的方向向量分別為n1,n2,n3。其中,n1為點鄰域的主向量,n3為法向量。本文采用局部尺度信息度量[13]進行尺度信息計算,可計算出待測點Q屬于線性、平面與球形點的概率P1D、P2D、P3D。
由于在高程濾波后,極有可能將經(jīng)過閾值濾波的平面點誤認為是線性點標記,故多屬性融合的非建筑物點云濾波方法基于以下規(guī)則對點的尺度進行劃分。
1)P3D=max{P3D,P2D,P1D}的為球狀點,Label=0;
2)P2D=max{P3D,P2D,P1D}的為平面點,Label=1;
3)P1D=max{P3D,P2D,P1D}<0.9,且n1平行地面的點為平面點,Label=1;
4)P1D=max{P3D,P2D,P1D},且Label≠3的為垂直線性點,Label=2。
其中,球狀點多為冠狀植被,垂直線性點為樹木樹干、電線桿等垂直于地面的物體,平面點多為建筑物點云。但由于傾斜攝影匹配點云密度較低,單一依賴于幾何信息會造成結(jié)果不準確,故方法引入顏色相似性進行聯(lián)合判斷。在對顏色相似性進行計算時,需要先標定植被顏色信息。多屬性融合濾波算法采用投票機制,對Label=0的點進行RGB信息投票,得票最高的顏色信息被標記為植被顏色信息,顏色的相似性根據(jù)以下規(guī)則進行度量。
1)點與植被顏色的相似性Sim1值大于閾值。
2)點的鄰域平均顏色信息與植被顏色信息相似性Sim2大于閾值。Sim1、Sim2的計算如式(1)所示。
(1)
式中:R′、G′、B′為植被顏色信息;R、G、B為待測點顏色信息;Rran、Gran、Bran分別為各個通道上最大值與最小值的差。融合點云尺度信息與顏色信息的植被點概率計算如式(2)所示。
(2)
式中:Pv為待測點屬于植被點的概率。對Pv大于閾值的點進行去除。此外,對于Label=2的點,將作為非建筑物點直接去除。
2.3 建筑物平面獲取
在濾除非建筑物點云后,文中采用融合顏色信息的區(qū)域增長算法[14]進行平面分割,并為其添加約束規(guī)則,使其能夠克服噪聲點的影響,實現(xiàn)高效平面探測。多規(guī)則約束的區(qū)域增長算法首先從所有Label=1的點中隨機選取一點作為種子節(jié)點i,選取其半徑R內(nèi)的點作為鄰域點j,基于以下規(guī)則進行區(qū)域增長。
1)Labeli=Labelj=0,點的顏色相似;
2)Labeli=Labelj=1,且法向量夾角小于閾值,點的顏色相似。
在得到初始平面后,對所有平面的點數(shù)進行閾值判斷,若區(qū)域內(nèi)點數(shù)小于一定閾值,則此區(qū)域按照噪聲點去除;若大于閾值則利用空間一致性分析對離散的平面和點進行聚類融合,以獲得空間上連續(xù)的平面區(qū)域。
2.4 屋頂輪廓獲取
屋頂輪廓線提取是三維建模與房屋信息計算的關(guān)鍵步驟。雖然不同地區(qū)的房屋構(gòu)成會具有顯著差異,但是房屋信息的計算主要依賴于屋頂投影的計算,并且同一區(qū)域房屋多為一種類型。一般來說,住房屋頂可分為平頂型和多面型兩種,針對不同房屋類型,采用多種特征線組合策略進行房屋輪廓提取。其中,不同特征線來自不同數(shù)據(jù)源。
采用多源數(shù)據(jù)可以有效克服從單一數(shù)據(jù)源進行提取存在的輪廓線缺失問題,在進行區(qū)域輪廓線提取時,依據(jù)地域特點人工選擇合適多源特征線組合同樣可以有效提升計算效率。對于平頂房,采用房屋立面投影線與高程急劇變化的邊界線融合策略;對于多面型房屋除兩種基礎(chǔ)的線型外,需要添加不同平面的相交線進行輔助修訂。上述3種特征線定義如下。
1)房屋立面的投影線。房屋通常可以認為是由多個垂直于地面的墻立面和屋頂組成,房屋立面在地面上的投影線輪廓即可視為房屋的外圍輪廓。對比于屋頂輪廓,由于立面投影線可去除屋檐等延伸部分的影響,在計算房屋面積等信息時,該輪廓的可靠度高于屋頂輪廓線。
2)高程急劇變化的邊界線。DSM模型包含了地面上各種物體,由于房屋多為高大地物,則屋頂邊界與周圍地物具有較大的高程差。基于這一客觀事實,根據(jù)DSM生成像元值代表高程變化的梯度圖像,利用最小像元值和最短線長原則檢測出高程急劇變化的邊界線作為輪廓修正因子,對投影線中存在的缺失進行補充修正。
3)不同平面相交線。對于多面型房屋,其不同平面的相交線和房屋2D輪廓線連通,且平面相交線之間往往具有對稱性,故可以使用不同平面相交線對缺失的2D輪廓進行補充修正。
圖3顯示了人字形屋頂輪廓線提取流程,圖3(d)、圖3(e)、圖3(f)分別為該區(qū)域高程急劇變化的邊界線、不同平面相交線與房屋立面投影線。將上述3種輪廓約束線融合在統(tǒng)一模型中得到圖3(g)。由于直接融合后的線仍有缺失、不規(guī)則現(xiàn)象存在,故需要對缺失線條進行填補,并通過搜索成對相交點,按照最小化多邊形周長的原則構(gòu)造一個整體的屋頂輪廓多邊形。正則化后的輪廓線如圖3(h)所示。
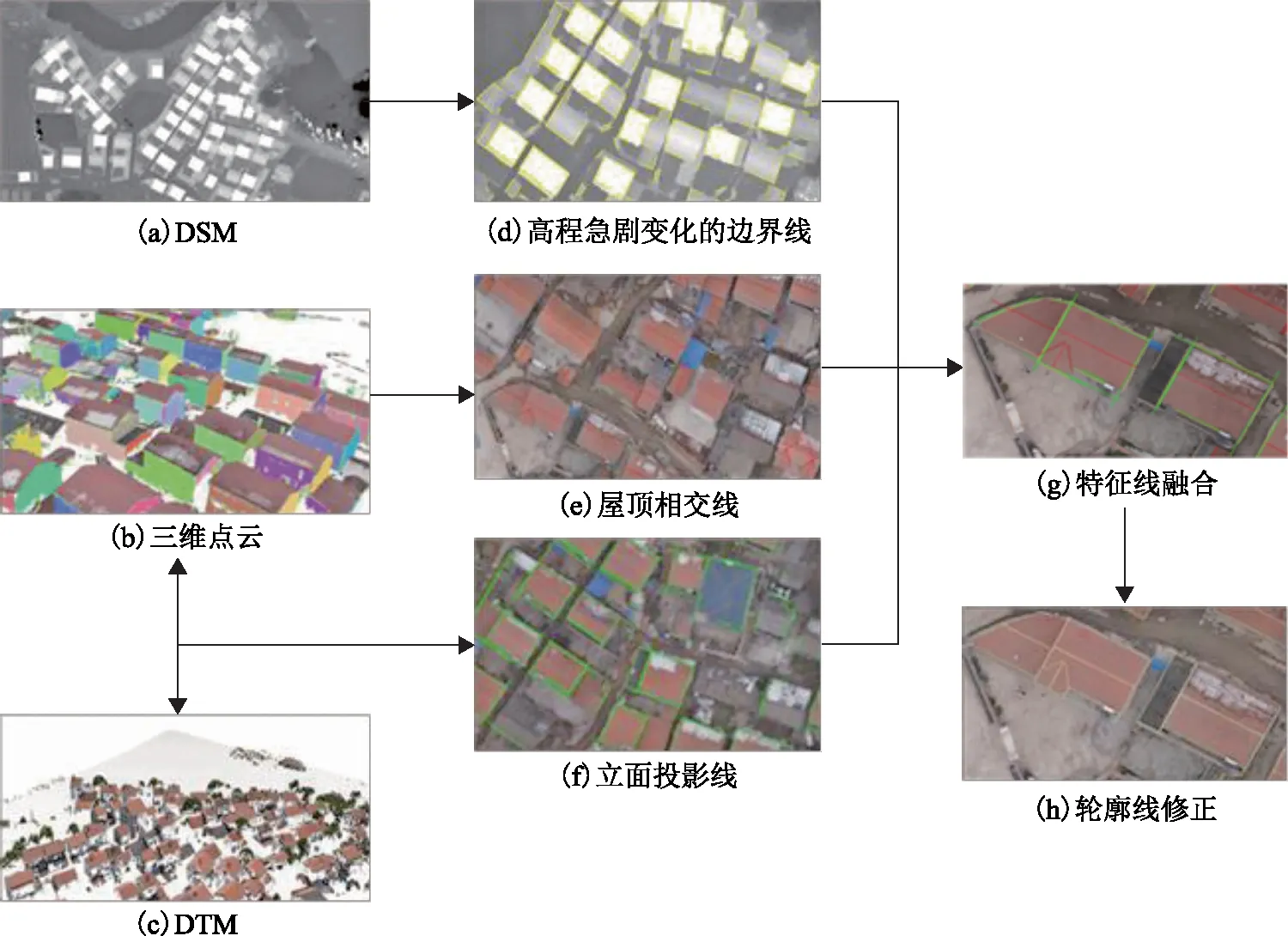
圖3 屋頂輪廓線提取流程
2.5 房屋信息統(tǒng)計和模型導(dǎo)出
樓層信息通過屋頂高度和研究區(qū)域內(nèi)平均樓層高度進行估計;房屋總建筑面積通過屋頂?shù)钠矫嫱队懊娣e和樓層數(shù)計算得出。建筑面積計算如式(3)所示。
S=S1+S2+S3
(3)
式中:S1為不包含陽臺和隔熱層的各樓層主體面積;S2為陽臺面積;S3為高度超過2.2 m的隔熱層面積。房屋的二維模型為一組屋頂外圍輪廓的邊界多邊形,主要導(dǎo)出格式為Shapefile。三維模型為包含屋頂和墻面在內(nèi)的建筑模型,對于不可見的墻體,根據(jù)屋頂輪廓和樓高外推獲取,主要導(dǎo)出格式為DXF。
3 算法分析與試點研究
3.1 非建筑物點云濾波
圖4顯示了多屬性融合的非建筑物點云濾波方法與單波段閾值分割法、過綠指數(shù)植被濾波的效果對比。如圖4(a)所示,由于光照等因素影響,由傾斜攝影測量數(shù)據(jù)生成的點云存在陰影遮擋、植被顏色差異較大等問題。圖4(b)為使用單波段閾值分割的結(jié)果,在利用單波段閾值分割進行植被點去除時,由于方法僅依賴于單一信息對于陰影點無法去除,同時遺留大量噪聲。圖4(c)為具有修正的過綠指數(shù)法,該方法對比于以往過綠指數(shù)法增添了幾何校正,對于離散的判斷出錯的植被點可以很好地去除,但是對于色差較大且密集成塊的植被點云濾波效果較差。多屬性融合的非建筑物點云濾波效果如圖4(d)所示,得益于方法考慮尺度與顏色信息,對比其他方法表現(xiàn)出了良好植被點濾波效果。并且對于在密集匹配過程中產(chǎn)生的與植被顏色差異較大的點,也能較好地檢測去除。但是,在經(jīng)過高程濾波的點云中除高大植被外可能還會存在樹干、電線、信號塔、太陽能等處于高處的非建筑物點,本文方法雖然可以結(jié)合顏色與幾何信息進行植被點去除,但在進行其他非建筑物點去除時,只能單一依靠形態(tài)去除電線桿等線狀非建筑物點,如圖4(d)所示,本文方法對于太陽能板、高大院墻等具有平面性質(zhì)的點無法有效去除。
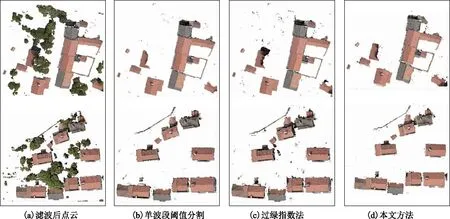
圖4 植被點云去除實驗
同時,進行無監(jiān)督信息的點云濾波,濾波的結(jié)果決定于點云自身性質(zhì)。由于光照、遮擋物、點云密度不均勻、稀疏等問題,直接從點云中獲取的顏色、局部信息并不完全可靠,雖然本文方法選用顏色與尺度信息結(jié)合的方式進行分類,降低了依靠單一信息錯誤分類的可能性,但在地物組成多、植被類型多樣、房屋結(jié)構(gòu)復(fù)雜的地區(qū)仍無法保證分類結(jié)果的準確性。
3.2 建筑物信息提取
為了探究房屋信息提取方法在具有復(fù)雜結(jié)構(gòu)的房屋中的適用性,在由瑞士公司senseFly提供的瑞士測區(qū)傾斜攝影測量數(shù)據(jù)上進行房屋信息提取。圖5(a)為該測區(qū)去除非建筑物點的部分點云;圖5(b)為在進行平面探測、空間聚類后的點云;圖5(c)為在多面型房屋輪廓提取方案下的房屋2D輪廓線。結(jié)果表明,對于確定的屋頂平面,本文方法可以較好地從中提取出輪廓信息,在屋頂平面缺失時也能很好地補全。但在建筑物分割時,由于存在兩棟房屋共用一墻的復(fù)雜房屋,單憑計算機無法準確判斷其是否為同一棟房屋,故在空間聚類時可能會出現(xiàn)錯誤,對于此類錯誤需要人工考察,或了解當?shù)亟ㄖ厣笞龀鋈斯Q斷。
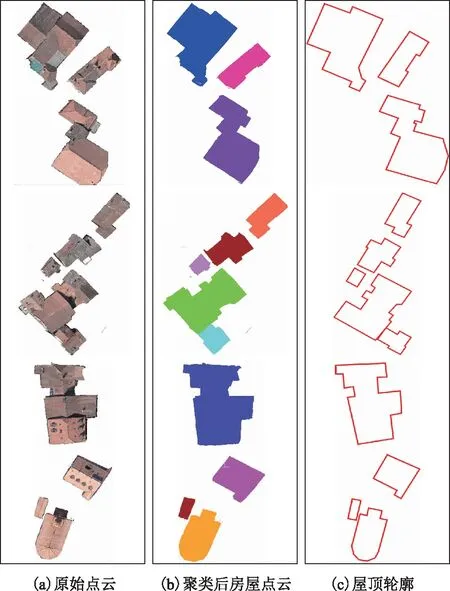
圖5 建筑物屋頂輪廓提取
3.3 試點研究
在位于施廟村的試點研究中,共進行兩輪調(diào)查,第一輪獲取房屋影像數(shù)據(jù),第二輪進行實地調(diào)研獲取房屋實際信息。在進行數(shù)據(jù)處理時,據(jù)《房產(chǎn)測量規(guī)范》規(guī)定,在房屋面積測量時只統(tǒng)計總高度高于2.2 m的房屋,故本文將高程閾值設(shè)置為2.2 m。試點數(shù)據(jù)高程濾波結(jié)果如圖6(a)所示,濾波后場景的主要組成為建筑物點云與植被點云。圖6(b)顯示了植被點概率計算結(jié)果,紅色為高概率植被點。在進行植被點云濾波后,場景中仍舊存在高大院墻,高大院墻在計算時容易被誤判為墻立面,故在實驗時設(shè)定的一組平面組件中,其中一個平面擁有3個以上的相鄰平面,且至少有兩個平面的法向量的夾角與該平面的夾角在85°至90°之間,則認為該平面為房屋立面。圖6(c)為建筑物平面分割結(jié)果,根據(jù)平面法向量方向的不同可將探測后的平面劃分為立面與屋頂。圖6(d)為從多源數(shù)據(jù)中提取的3種輪廓約束線。如圖6(e)所示,在提取出房屋輪廓后,可根據(jù)房屋輪廓信息進行大規(guī)模三維建模,三維模型為包含屋頂和墻面在內(nèi)的建筑模型,對于不可見的墻體,根據(jù)屋頂輪廓和樓高外推獲取,主要導(dǎo)出格式為AutoCAD DXF。房屋的二維模型為一組屋頂外圍輪廓的邊界多邊形,將其與正射影像圖疊加輸出,主要導(dǎo)出格式為Shapefile,導(dǎo)出結(jié)果如圖6(f)所示。
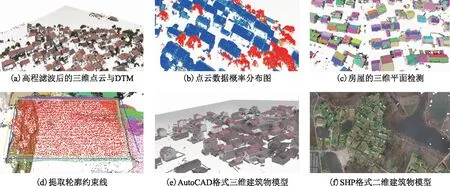
圖6 施廟村試點房屋建筑信息提取
在此次施廟村房屋實地調(diào)研中一共提取出162幢房屋,與在實地調(diào)查中共調(diào)查到158幢房屋對比,其中有3幢房屋是由于兩次調(diào)查時間較久而新增的房屋,1幢房屋為實地測量漏檢房屋,故本文方法可以探測到該區(qū)域內(nèi)的所有房屋平面。但探測到的房屋之中存在房頂脫落、墻面倒塌等破壞房屋,自動化方法無法精確捕捉,其中破壞房屋共有16幢。
為了對建筑物信息提取的效果進行定量分析,對提取到的142幢完整房屋信息計算其平面投影面積信息,并與實地測量的房屋投影面積進行對比,通過房屋在限差以內(nèi)的房屋占比、平均面積計算精確率、召回率、優(yōu)質(zhì)率對方法進行評估。同時與文獻[9]中提出的基于傾斜攝影測量的城市建筑物信息的方法對比。
其中,其限差E計算如式(4)所示。
(4)
式中:S為實地測量的真實房屋建筑面積。計算誤差在限差以內(nèi)的房屋記為合格。具體評估結(jié)果如表3所示。

表3 房屋信息調(diào)查定量評估 %
表3表明,本文方法在試點房屋調(diào)查中平均精確率可達99.24%,房屋占地面積數(shù)據(jù)誤差在限差以內(nèi)的房屋數(shù)量在總房屋數(shù)量中占比88.74%。圖7顯示了限差與誤差情況,部分房屋誤差遠大于限差,為了分析產(chǎn)生原因,對誤差值較大的房屋進行提取分析,發(fā)現(xiàn)誤差較大的房屋是由于隔熱層還有陽臺的面積統(tǒng)計出錯而引起的。在試點房屋中,部分陽臺采用玻璃圍護,因此無人機相機無法充分捕捉其顏色和紋理屬性,造成點云信息缺失,無法提供充足的邊界重建信息,造成漏檢現(xiàn)象。
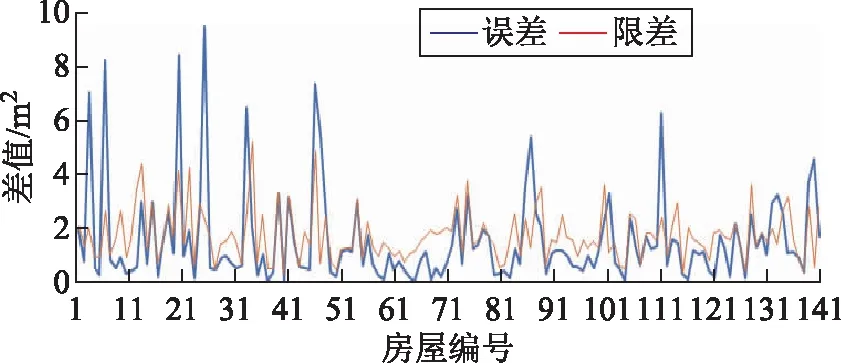
圖7 房屋占地建筑面積的誤差與限差分布
此外,高程濾波去除了低于2.2 m的點,對于鋪設(shè)隔熱層的低矮建筑,進行濾波且去除非房屋點后信息缺損嚴重,無法精確提取,同時隔熱層阻擋了房屋立面信息獲取,造成了房屋主體面積計算誤差。在去除陽臺與隔熱層的統(tǒng)計后,房屋合格率上升至91%,且房屋主體誤差超過限差的部分不超過1.5 m2。因此,本文方法在房屋信息計算方面是準確有效的,具有一定的實用價值。
4 結(jié)束語
本文提出了一種基于無人機傾斜攝影測量數(shù)據(jù)的農(nóng)村房屋信息自動化調(diào)查方案,該方法結(jié)合無人機傾斜攝影測量與自動化成圖等技術(shù),對農(nóng)村房屋進行數(shù)據(jù)收集、輪廓提取和面積計算,實現(xiàn)了從原始航空影像到二維和三維模型的自動輸出。與傳統(tǒng)的實地測量的農(nóng)村房屋信息調(diào)查方法和激光掃描的測量方法相比,基于影像的三維信息自動化處理方法在時間和成本效益上取得了很大的提升。算法上,在進行建筑物點云提取時,本文提出了一種多屬性融合的植被點去除方法,通過點的尺度與RGB信息結(jié)合快速高效地去除非房屋點云,利用基于點屬性的區(qū)域增長算法,準確地提取出房屋平面信息;在輪廓提取時,采用多線型融合最大限度還原屋頂輪廓,為三維精細重建與房屋信息計算提供良好基礎(chǔ)。實驗成果上,提供AutoCAD、ArcGIS等軟件的數(shù)據(jù)格式,方便進行數(shù)據(jù)處理和分析。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32