光譜模型結合面向對象法的山區水體提取
2022-10-13 09:13:56董哲王凌朱西存馮文斌張美霞
遙感信息 2022年4期
關鍵詞:方法
董哲,王凌,朱西存,馮文斌,張美霞
(山東農業大學 資源與環境學院,山東 泰安 271000)
0 引言
山區地表水體影響著山區的生態系統和人類的生產勞動,快速、大范圍地獲取山區水體的分布情況對于山區的災害評估、用水安全保障、資源分配有著重要的意義[1-2]。山區水體分布零散,面積相對較小,且易與山地陰影相混淆,在水體的提取上存在一定的難度。遙感作為采集地球數據以及變化信息的手段,已經廣泛應用于國民經濟和社會發展的各個領域[3],也成為獲取水體真實范圍的一個可行手段[4]。中低分辨率遙感數據很難用于高精度山區地表水體的提取,而高分二號(GF-2)作為我國第一顆分辨率為亞米級的光學遙感衛星[5],為獲取更真實、更豐富的地表水體信息提供了可能。
針對遙感影像的水體提取,國內外學者進行了大量的研究。目前遙感影像水體提取最常用的方法是水體指數法[6],通過分析水體的光譜特征選取相關波段構建水體指數,并給定相關閾值來進行水體提取[7]。Mcfeeters[8]根據植被和水體的反射不同構建歸一化差異水體指數(normalized difference water index,NDWI),該指數突出了水體信息,可以很好地提取水體,但會造成陰影與水體的混淆,形成的噪聲降低了水體提取的精度。馬吉晶等[9]通過濁水指數對蘭州市安寧區濕地公園進行了渾濁水體提取,證明濁水指數對區分渾濁水體的效果較好。鄭逢斌等[10]利用決策樹法,結合最大似然法、單波段閾值法和城區水體陰影指數(urban shadow water index,USWI)提取了安陽縣彰武水庫的水體,結果表明該方法的水體提取精度比NDWI高。
面向對象法也是一種常見的遙感信息提取方法,它能夠利用更加豐富的地物信息,同時還具有良好的抗噪能力。相較于水體指數法,面向對象法可以減少“椒鹽現象”的出現[11],能更好地利用高分辨率影像豐富的信息,使得面向對象方法提取水體信息更加符合實際,很好地彌補水體指數法的缺陷。付勇勇等[12]基于面向對象法,采用分離閾值法建立提取規則,實現杭嘉湖水網平原水體的提取,總體精度達到97.3%。王俊海等[13]通過統計簡單的光譜信息、紋理特征,利用面向對象法提取揚州市某區域的水體,精度為89.55%,很好地區分了水體和建筑物陰影,表明該方法在城區水體提取方面的有效性。
上述水體提取實例均基于GF-2影像。目前的GF-2水體提取研究多數針對平坦區域,而針對地勢起伏較大的山區進行的水體提取卻較少。面向對象法提取水體需要進行復雜的計算才能得到最優的分割參數,用以保證水體邊界提取的正確性[14]。受限于GF-2僅有藍、綠、紅、近紅外4個波段,無法構建出需要中波紅外波段的改進歸一化差異水體指數(modified normalized difference water index,MNDWI)、水體指數2015(water index 2015,WI2015),以及自動水體提取指數(automated water extraction index,AWEI)等提取效果較好的水體指數。
基于上述考慮,本文在NDWI指數的基礎上,提出差異水體光譜模型(difference water spectral model,DWSM),通過與面向對象法結合,旨在為大范圍山區水體的提取提供一種更加準確的方法,簡化復雜計算。
1 研究區概況與數據來源
1.1 研究區概況
研究區為山東省泰安市泰山的主體區(117°0′E~117°10′E,36°12′N~36°20′N),最高海拔1 532.7 m,高差達1 200 m以上,地勢起伏較大,屬于暖溫帶季風氣候,具有明顯的氣候垂直差異,山腳年均氣溫13.2 ℃,年均降水量678.5 mm;山頂年均氣溫5.9 ℃,年均降水量1 031.3 mm。水體分布較離散,包括橫嶺后、曹家莊、藥鄉附近面積較大的水庫及一些零散分布的坑塘。地表景觀主要包括大范圍的林地、分布在山腳四周的耕地及裸地、零散分布的水體及建筑用地。
1.2 數據來源
選用2017年11月8日分辨率為4 m的GF-2多光譜影像作為實驗影像。同時,為驗證本文方法的普適性,以2018年6月23日的GF-2多光譜影像作為驗證影像,兩期影像的云覆蓋率均為0%。利用Erdas Image對實驗影像和驗證影像進行預處理,包括正射校正、影像匹配、圖像裁剪,其中正射校正總體誤差小于0.3個像元。
2 研究方法
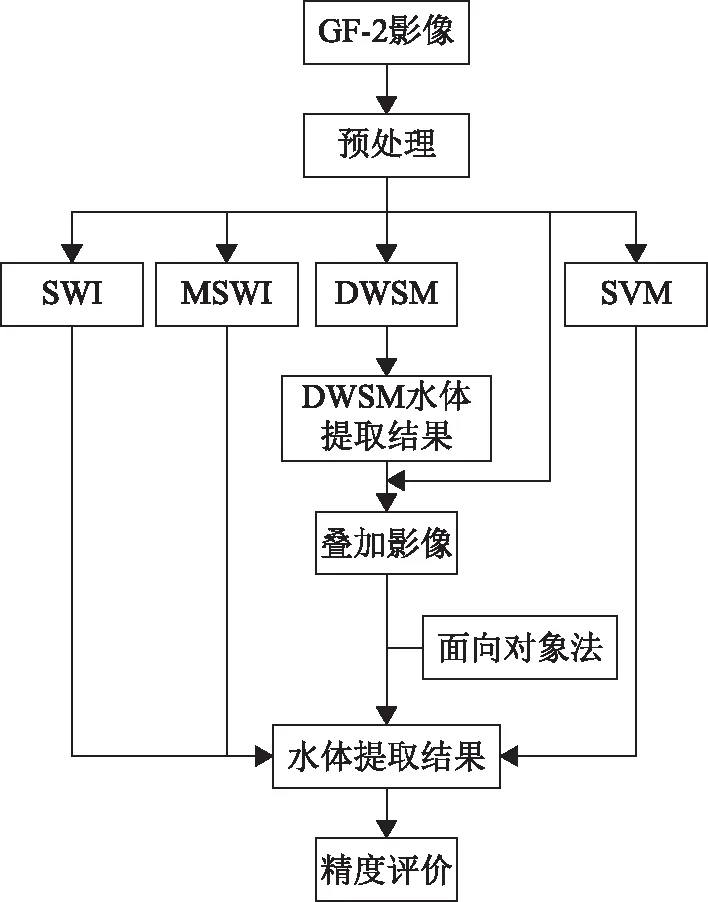
圖1 水體提取技術路線
本文技術路線如圖1所示,采用差異水體光譜模型結合面向對象法作為水體提取方法,將陰影水體指數(shade water index,SWI)決策樹法[15]、改進的陰影水體指數(modified shade water index,MSWI)決策樹法[16]和支持向量機法(support vector machine,SVM)作為此方法的對照方法。
2.1 DWSM結合面向對象法
NDWI利用水體在近紅外波段反射弱、在綠光波段反射強的特點,基于上述兩波段構建歸一化差異指數來突出水體信息,表達如式(1)所示。
(1)
式中:Green為綠光波段DN值;NIR為近紅外波段DN值。NDWI可以抑制植被和土壤信息,但會混淆水體和陰影[17],這種情況在山區尤為嚴重,地形起伏較大的山區不僅存在大面積的山體陰影,也存在零散分布的建筑物陰影,使得山區水體提取難度變得更大。為更加準確地提取水體,本文基于NDWI指數提取水體結果掩膜后的實驗影像,選取24 978個水體像元和27 956個陰影像元進行對比分析,其中水體主要包括研究區的水庫和坑塘,陰影包括建筑物陰影和山體陰影,分別統計水體和陰影DN值在4個波段像元的頻率,如圖2所示。從圖2可以看出,相較于綠光、紅光和近紅外波段,水體-陰影在藍光波段的DN值重疊范圍最小,這表明在選取合適閾值的前提下,水體-陰影在藍光波段有較好的區分度。為了進一步擴大水體-陰影的區分度,構建差異水體光譜模型DWSM,表達如式(2)所示。
(2)
式中:Blue、Green、NIR分別為藍光波段、綠光波段、近紅外波段的DN值。
利用與圖2相同的方式在DWSM影像中選取水體像元和陰影像元,構建出的水體-陰影對比頻率如圖3所示。從圖3可以看出,當分割閾值為119時,水體和陰影具有良好的區分度,但仍有1.14%(319個像元)的陰影被錯分為水體,將繼續利用面向對象法剔除這部分陰影噪聲。
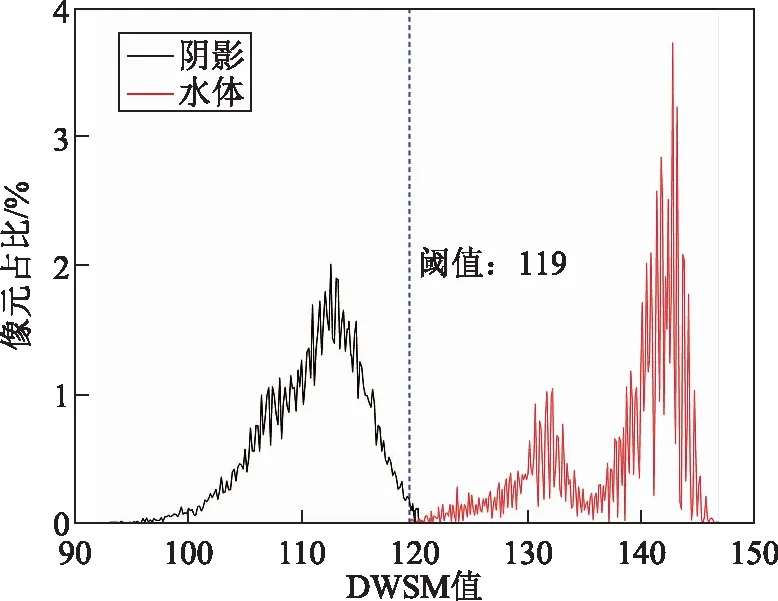
圖3 水體-陰影DWSM值頻率圖
面向對象水體提取方法包括影像分割和水體提取規則建立兩個步驟。影像分割最終目的是滿足異質性標準,規則集的建立主要依靠光譜特征、形狀特征以及紋理特征3個方面[18]。
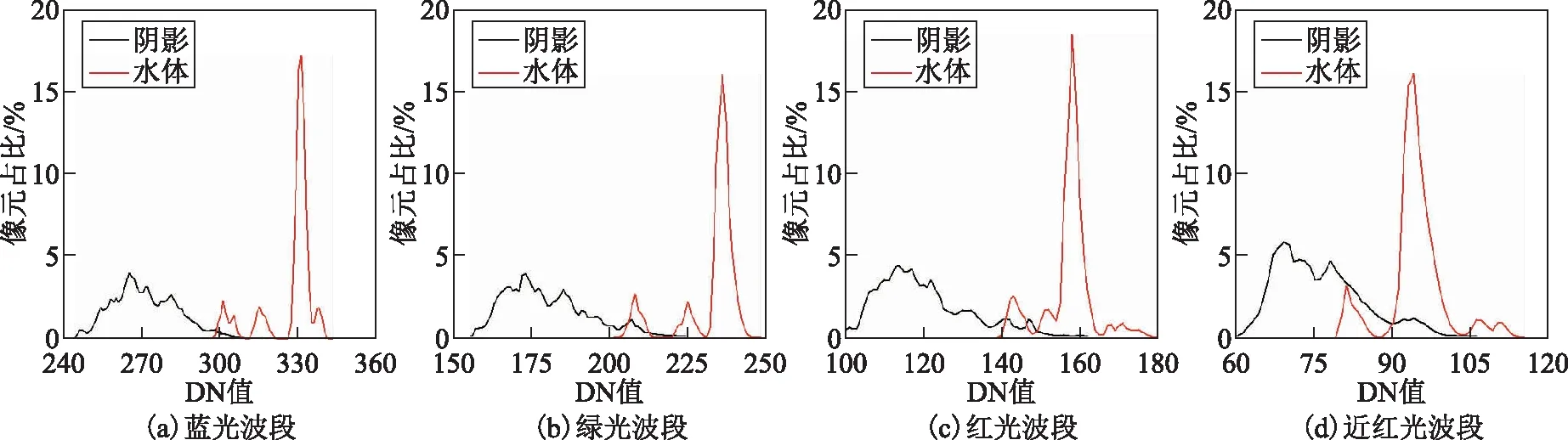
圖2 4個波段水體-陰影DN值頻率圖
1)面向對象的多尺度分割。根據研究區水體形狀不規則、大小不一的特點,選取多尺度分割法[19]作為影像分割方法,用以提取水體分布信息。分割參數會影響圖像分割的質量,進而直接影響到面向對象的分類精度。本文將DWSM水體提取結果作為第5波段與原始GF-2 4個波段疊加,選取DWSM水體提取結果范圍內的影像用于分割,每個波段的權重均為1。通常情況下,影像的最優分割尺度難以把握[20],需要進行繁雜的計算。而本文以DWSM所提取的水體區域作為影像分割范圍,在忽略背景0值的情況下,水體是獨立存在的,不與其他地物相鄰,要區分的類別只有水體和零散陰影兩類,且要剔除的陰影較NDWI法少,利用簡單的“試錯法”可以很快地找到合適的分割尺度。經過實驗,當尺度參數為50,形狀因子為0.1,緊實度因子為0.3時,分割效果較好,不論是水庫還是坑塘,分割情況都符合實際,沒有出現水體與其相近的陰影區域分割到同一對象的情況,分割后的對象具有高度均質性。分割后的影像及細節如圖4所示。
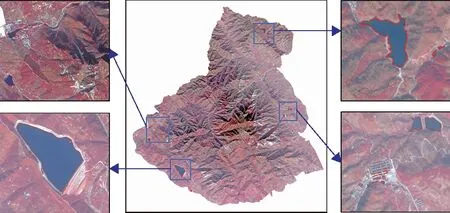
圖4 尺度為50的分割圖及細節(R:NIR;G:Red;B:Green)
2)規則建立。綜合考慮研究區內水體分布較為零散、面積相對較小且輪廓不規則的特點,同時兼顧水體在不同波段的特性,經多次實驗,本文選用水體強反射的藍波段、水體強吸收的近紅外波段和DWSM水體提取波段分別構建比值率(ratio)、均值(mean)、亮度值(brightness)3種光譜特征值作為水體提取的規則。
在分割后的影像中盡可能均勻地選取水體和陰影訓練樣本,創立訓練樣本集,從而得到水體提取規則值域。實驗影像水體提取規則范圍如表1所示。
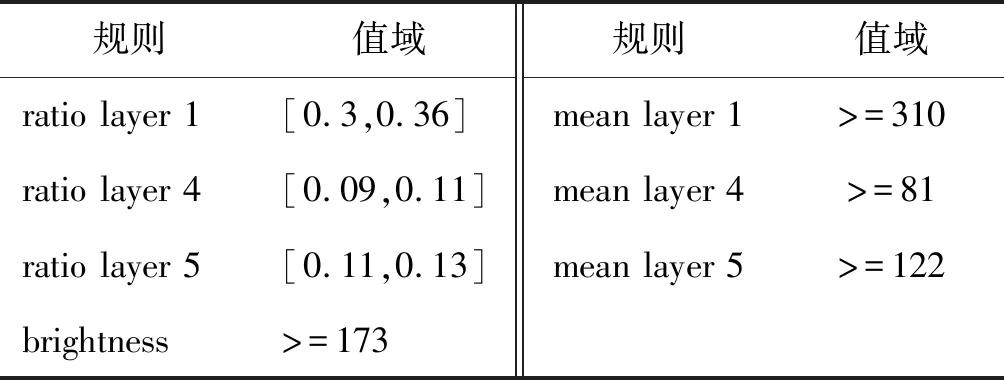
表1 實驗影像規則值域
2.2 對照方法
1)決策樹法。SWI決策樹法、MSWI決策樹法是基于GF-1影像提出的水體提取算法,這兩種決策樹法都是先利用水體在近紅外波段的強吸收性的特點,通過設定閾值在近紅外波段實現水體粗提取,再利用SWI、MSWI分別實現水體的精確提取。SWI、MSWI的計算如式(3)和式(4)所示。
SWI=Blue+Green-NIR
(3)
MSWI=(Blue-NIR)/NIR
(4)
式中:Blue、Green、NIR分別為藍光、綠光、近紅外波段的DN值。
2)支持向量機法。支持向量機法是建立在統計學習理論基礎上的機器學習方法[21]。SVM分類法的精度主要取決于核函數類型的選擇和核函數參數的設置[22]。研究表明,在選取合適的核函數類型和參數的前提下,即使選取樣本數量較少,SVM分類也能取得較高的精度[23]。本文借鑒段秋亞等[24]的研究,選用徑向基核函數(radial basis function,RBF)和對應默認的參數(gamma為0.25;penalty為100;pyramid為0)進行GF-2影像水體信息提取。
2.3 精度評價
選取400個水體點位和400個非水體點位,利用混淆矩陣計算總體分類精度(overall accuracy,OA)、Kappa系數作為各種水體提取方式的精度評價指標。
3 結果分析
3.1 NDWI與DWSM提取結果對比
NDWI與DWSM水體提取結果對比如圖5所示。NDWI法混淆了水體和陰影,形成大量的噪聲;DWSM法可以很大程度上避免這種情況,在高低起伏的山區提取水體的效果更好,在基本剔除陰影的同時,保留完整的水體信息,但也存在一些陰影像元錯分,使得影像存在椒鹽現象,原因在于這些陰影和水體在4個波段的光譜特征極為相似,單純地利用波段之間的數學運算難以找出陰影和水體之間的區別,因而結合面向對象法是必要的。
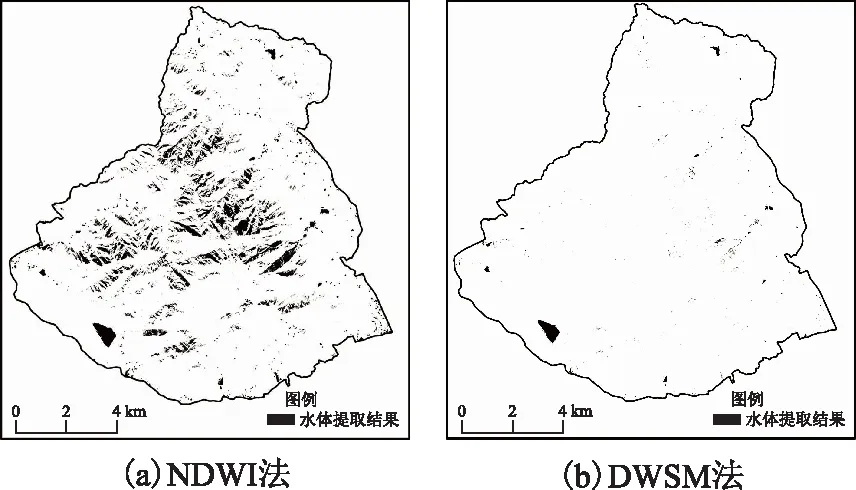
圖5 NDWI法與DWSM法水體提取結果
3.2 本文方法與對照方法的結果對比
實驗影像和驗證影像水體提取結果分別如圖6和圖7所示,紅圈是錯分的山體陰影,藍圈是錯分的建筑物陰影。其中,圖7結果只展示精度較高的SVM法和DWSM結合面向對象法。不同方法的水體信息提取精度評價見表2。
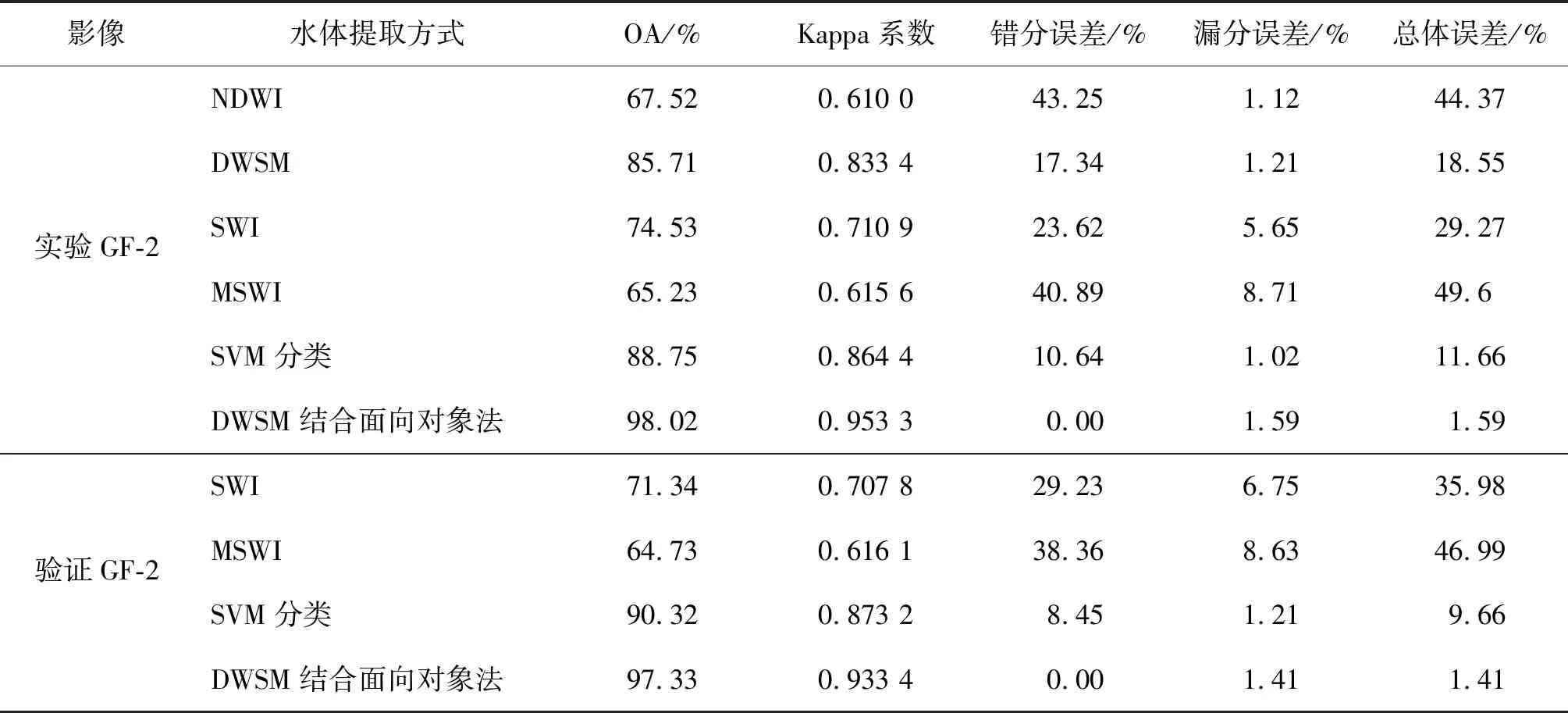
表2 水體提取精度評價結果
由表2可知,無論是在實驗影像還是驗證影像中,4種水體提取方法的總體精度和Kappa系數由高到低均為DWSM結合面向對象法、SVM分類法、SWI決策樹法和MSWI決策樹法。DWSM結合面向對象法的Kappa系數和總體分類精度均高于其他算法,且水體提取精度較為穩定。實驗影像和驗證影像的總體分類精度均大于95%,Kappa系數分別為0.953 3和0.933 4。DWSM結合面向對象法在兩幅影像中的漏分誤差分別為1.59%和1.41%,錯分誤差均為0%,總體誤差最低。該方法不僅可以很好地區分水體和其他易混地物,而且也能較為精準地提取細微水體,并未出現嚴重的水體漏分情況,在保證水體信息完整性的同時,減少椒鹽現象的發生(圖6、圖7)。
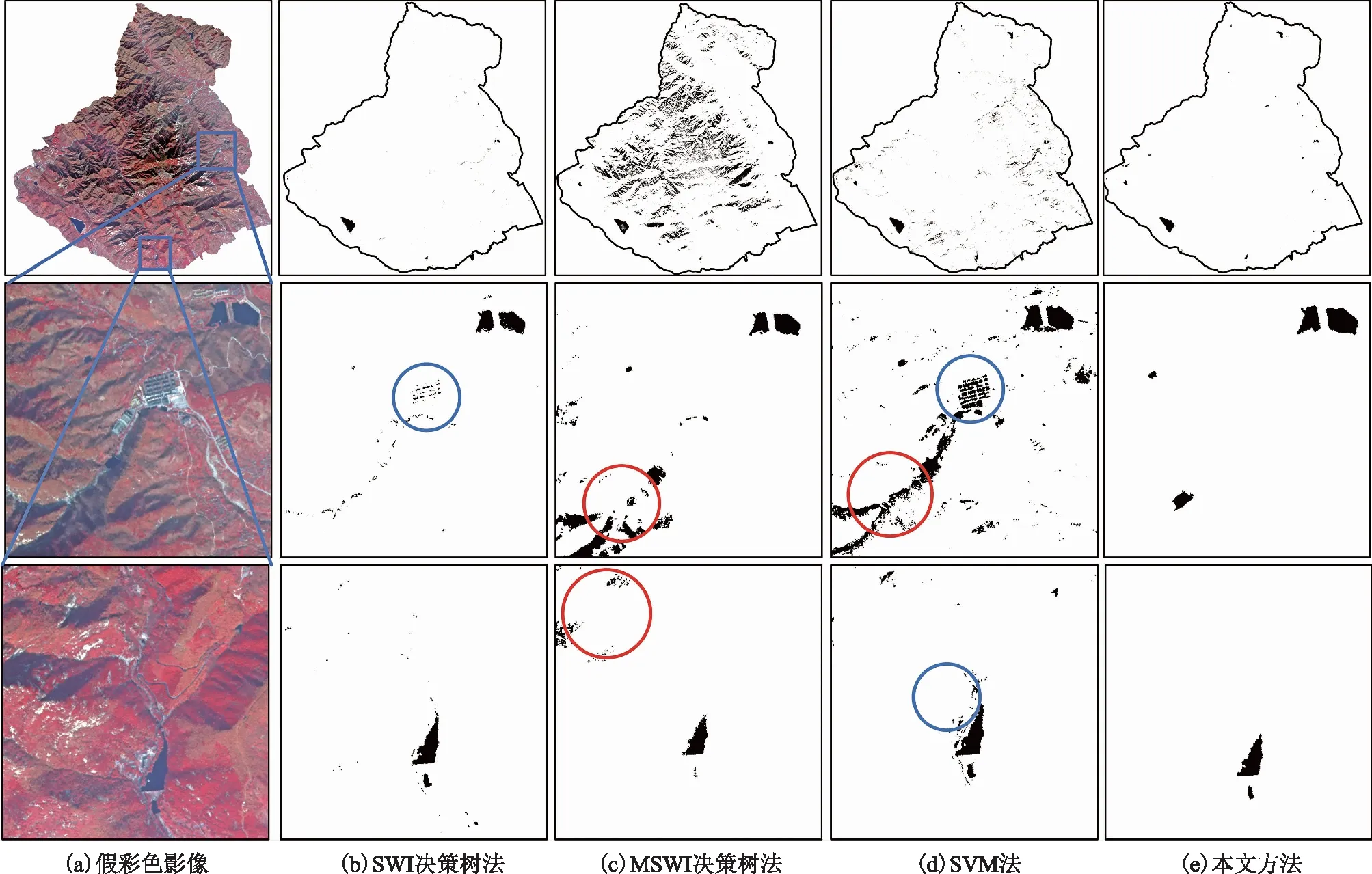
圖6 實驗GF-2影像水體提取結果及細節對比
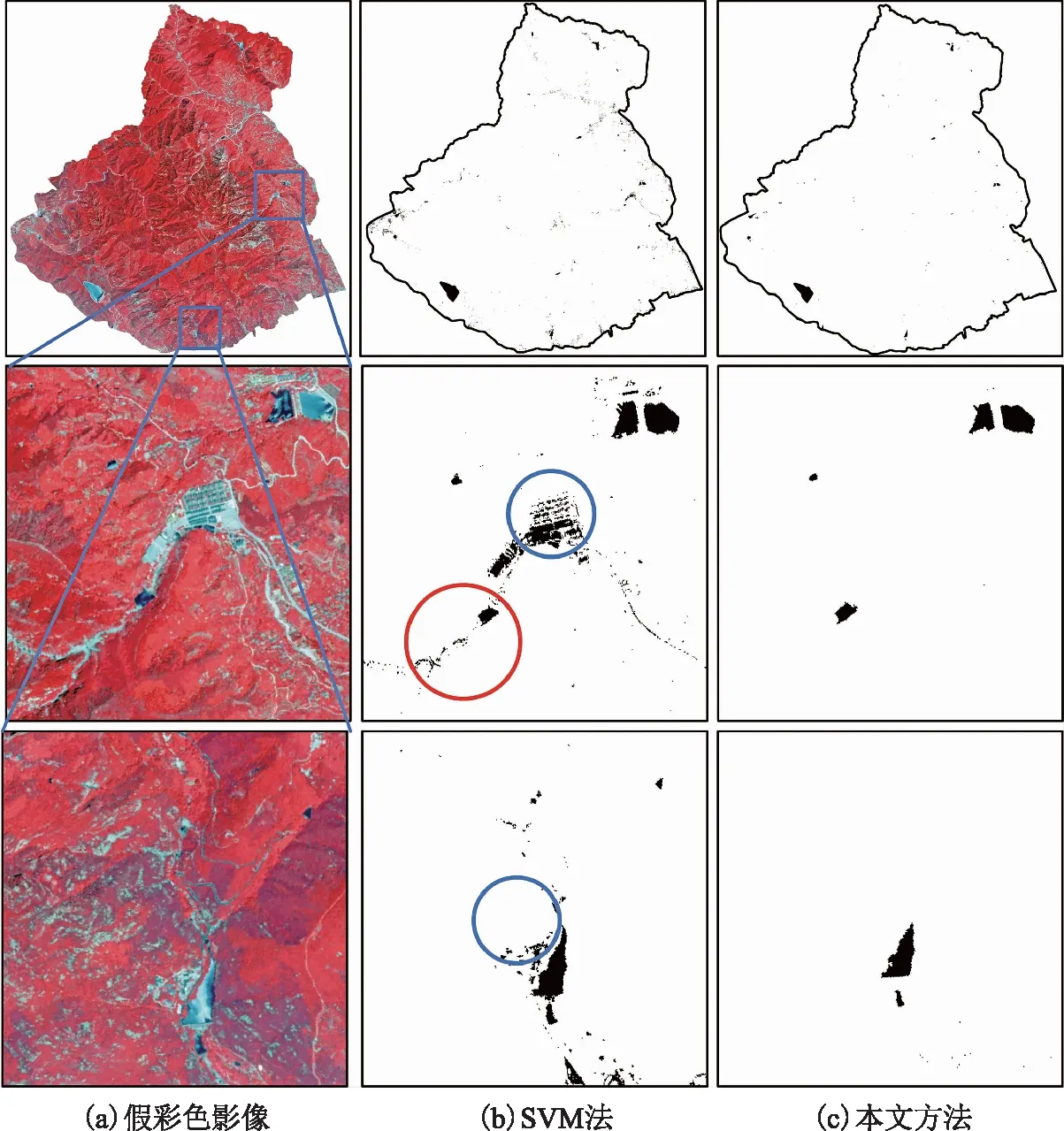
圖7 驗證GF-2影像水體提取結果及細節對比
SVM法提取的水體輪廓較為符合實際情況,很好地保持了水體信息,在4種水體提取方法中的漏分誤差最低,但是伴有建筑物陰影以及部分山體陰影的誤提,兩幅影像中的總體精度較DWSM結合面向對象法下降了9.27%和7.01%。
MSWI決策樹法的精度在4種方法中最低,Kappa系數分別為0.615 6和0.616 1。與NDWI相似。MSWI決策樹法精度低主要在于光譜特征相似的山體陰影、植被陰影被誤分為水體。SWI決策樹法較MSWI決策樹法精度略有提高,總體分類精度分別提高了9.30%和6.61%,但依然存在著大量陰影錯分,同時漏分誤差也較高。無論是SWI決策樹法還是MSWI決策樹法,應用于本研究區的水體提取效果均不理想,不能作為水體提取的最終結果。
4 結束語
基于GF-2影像,本文利用DWSM與面向對象法相結合的方法,在山區實現了水體信息的高精度提取,并與SWI決策樹法、MSWI決策樹法和SVM分類法進行對比,結論如下。
1)在GF-2影像中,DWSM能夠很好地減少由地形起伏造成的陰影噪聲,相較于NDWI,應用于山區水體提取效果較好。
2)DWSM結合面向對象法的提取精度高于對照方法,在兩個時相GF-2影像上都可以取得較高的精度;其次是SVM分類法,SVM法可以較為精確地提取水體輪廓,但會受到建筑物陰影的影響,降低了水體提取精度;而SWI決策樹法精度比前兩種方法低,存在大量陰影噪聲。
3)在波段較少的影像中,單純利用水體指數法提取山區水體的精度不高,如果要獲得更好的水體提取效果,水體指數與面向對象法相結合是一種有效的方法。
本文所提出的水體提取方法在山區取得了較高的精度,后續將進一步驗證其在平原地區的應用。獲取合適閾值是光譜模型準確提取水體的前提,如何快速準確地在影像中確定水體閾值將是下一步的方向。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56