基于數字信號處理器的船用異步電機矢量控制方法
2022-10-18 12:12:36雷道仲
艦船科學技術 2022年18期
關鍵詞:方法
雷道仲
(1. 湖南省電子學會,湖南 長沙 410200;2. 湖南信息職業技術學院,湖南 長沙 410200)
0 引 言
異步電機已成為船舶電力領域常用的發電設備。船舶運行環境過于復雜,船用異步電機需要具備更高的控制性能。矢量控制技術是控制船用異步電機的重要方法,矢量控制是電氣傳動領域的重要控制技術,矢量控制技術的調速性能優越,可以實現船用異步電機的精準控制。船用異步電機是一個多變量、具有極強非線性時變參數組成的強耦合系統,異步電機的定子電壓、定子電流控制是異步電機矢量控制的重要控制方式,異步電機矢量控制可以令船用異步電機保持在最佳運行狀態。船用異步電機受到運行頻率、環境溫度以及磁飽和程度影響,轉子磁場定向存在差異,影響船用異步電機矢量控制的動態響應性能。船用異步電機矢量控制時,應具備自適應控制性能,提升船用異步電機矢量控制的動態響應性能。船用異步電機矢量控制時,經過變頻調速后的電機動態性能應滿足電機的調速性能需求。
目前針對異步電機控制的研究較多,祝新陽等[對滑模觀測器的常數切換函數進行改進,引入了低通濾波器,利用改進后的滑模觀測器控制永磁同步電機,通過實驗驗證該方法可以實現永磁同步電機的頻率與轉速的精準控制。胡冰等利用無速度傳感器對感應電機進行矢量控制,該方法將積分器利用低通濾波器代替,提升了磁鏈的觀測精準性。通過實驗驗證該方法可以改善電機控制過程中,受到隨機擾動與測量噪聲的影響,提升參數估算精度。以上2種方法雖然可以實現電機的控制,但是存在運算速度過慢影響控制速度的缺陷。數字信號處理器具有運算速度快的特點,面向電機控制的數字信號處理器可以快速運行矢量控制方法,提升船用異步電機的矢量控制性能。通過實驗,驗證該方法具有良好的控制穩定性。
1 船用異步電機矢量控制方法
1.1 船用異步電機數學模型
船用異步電機矢量控制時,依據轉子磁鏈實施兩相同步旋轉定向時,存在表達式如下:

式中:ψ與ψ分別表示坐標系中,船用異步電機轉子磁鏈的軸分量與軸分量; ψ與ψ分別表示坐標系中,船用異步電機轉子磁鏈的軸分量與軸分量;ψ表示船用異步電機轉子磁鏈的旋轉矢量。
依據以上公式,獲取坐標系下,船用三相異步電機的狀態方程表達式如下:

式中:i與i表示坐標系內,船用異步電機轉子電流的軸分量與軸分量;與n分別表示船用異步電機的轉動慣量以及磁極對數;L 與L分別表示定子與轉子間的互感與自感;T與T分別表示轉子的電磁時間常數以及負載轉矩;ω與 ω分別表示船用異步電機的同步角速度與轉子旋轉角速度;T表示電磁轉矩。
通過式(4)獲取船用異步電機轉子磁鏈的旋轉矢量表達式如下:

式中,表示微分算子。
船用異步電機的同步旋轉角速度表達式如下:

電磁轉矩的表達式如下:

式(5)~式(7)構成船用異步電機矢量控制的基本方程,依據以上公式作為矢量控制的理論基礎,利用數字信號處理器矢量控制船用異步電機。
1.2 數字信號處理器的矢量控制方法
1.2.1 數字信號處理器設計
數字信號處理器的內部程序和數據分開設置,數字信號處理器設置的硬件乘法器,可以為船用異步電機矢量控制提供控制指令,實時控制數字信號運算。選取TMS320F28335型單片機作為船用異步電機矢量控制的數字信號處理器。該數字信號處理器工作頻率高達150 MHz,滿足船用異步電機矢量控制的高精度控制需求;具備32位浮點處理單元,包含豐富的外部I/O口,存儲空間大。所選取數字信號處理器中包含針對電機矢量控制設置的專用外圍,具有極高的模數轉換能力。利用數字信號處理器處理矢量控制的轉矩、磁鏈、轉速估算等控制過程,提升船用異步電機的控制性能。
1.2.2 數字信號處理器的異步電機矢量控制
利用所選取的數字信號處理器,運行異步電機矢量控制的轉速估算、轉矩電流計算、磁鏈調節等過程,提升矢量控制的運算速度。矢量控制方法將船用異步電機定子電流通過旋轉變換方法解耦,實現船用交流異步電機的轉矩控制與磁鏈控制。利用數字信號處理器完成船用異步電機矢量控制的總體結構圖如圖1所示。可以看出,利用異步電機的轉速估算結果與轉速指令值間的差值,通過速度控制器獲取船用異步電機下一指令周期的電磁轉矩輸入值,將所獲取電磁轉矩輸入值作為轉矩環的輸入量。設置電磁轉矩反饋值作為轉矩環的另一輸入量,將二者之差設置為矢量控制轉矩調節器的輸入值,獲取電壓矢量的轉矩分量指令值。選取PI控制算法實現船用異步電機的轉速估計、轉矩調節以及磁鏈調節,利用異步電機的狀態方程估算轉子磁鏈,實現船用異步電機的磁通電流、速度以及轉矩閉環控制。

圖1 船用異步電機矢量控制方法Fig. 1 Vector control method of marine asynchronous motor
2 實例分析
為了驗證所研究方法的控制性能,在Simulik軟件中,構建仿真模型。所構建船用異步電機模型的環境為海洋環境,直流母線電壓為220 V,脈寬調制的載波頻率為40 Hz,矢量控制時的采樣周期為1 ms。所構建船用異步電機模型的參數設置如表1所示。

表1 船用異步電機模型參數Tab. 1 Model parameters of marine asynchronous motor
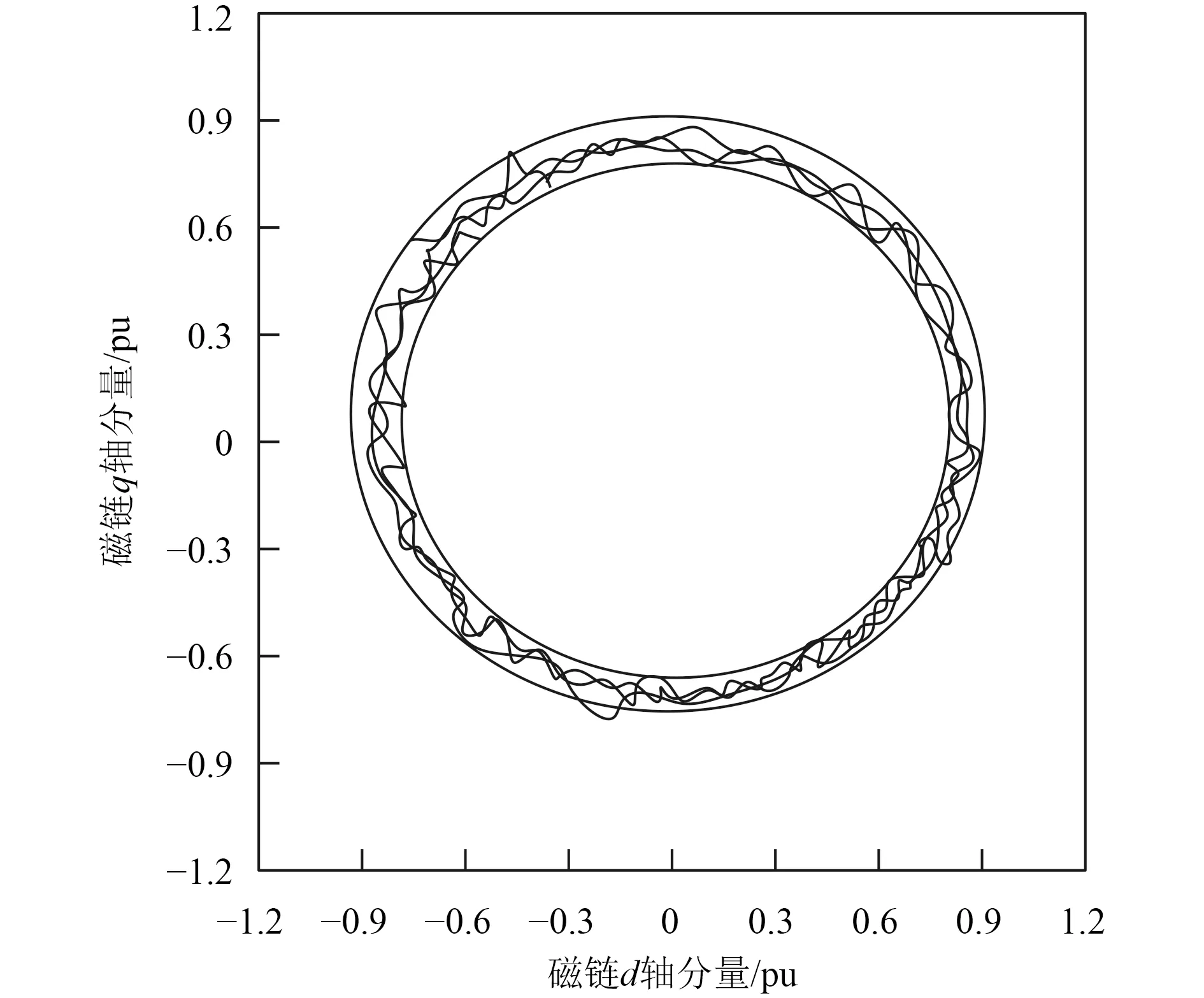
圖2 解耦后定子磁鏈變化Fig. 2 Stator flux changes after decoupling
采用本文方法對船用異步電機進行矢量控制,解耦后定子磁鏈變化結果如圖2所示。可以看出,采用本文方法對船用異步電機進行矢量控制,解耦后異步電機的定子磁鏈軌跡與理想圓形軌跡極為逼近,驗證本文方法對船用異步電機矢量控制的控制效果良好。通過矢量控制,使完成解耦后的磁鏈軌跡與圓形更加接近,具有良好的控制性能,滿足矢量控制的期望控制狀態。采用本文方法控制船用異步電機的跟蹤能力良好,縮小勵磁控制靜差范圍,磁鏈波形波動極小,正弦度良好,滿足轉子磁場控制時,磁鏈不變的控制效果。
設置船用異步電機的初始轉速為500 r/min,2 s時將轉速提升至1 000 r/min,統計船用異步電機的實際轉速與估算轉速的變化結果,統計結果如圖3所示。可知,采用本文方法對船用異步電機矢量控制,可以獲取精準的異步電機轉速估算結果。精準控制船用異步電機。本文方法輸出的異步電機轉速估計值與異步電機實際轉速較為接近,實驗結果驗證本文方法的轉速估計性能良好。

圖3 實際轉速與估算轉速對比Fig. 3 Comparison between actual and estimated rotational speeds
采用本文方法矢量控制船用異步電機,異步電機運行時間為2 s時,對船用異步電機添加一個大小為40 N·m的負載,定子電流控制結果如圖4所示。可知,采用本文方法對船用異步電機矢量控制時,異步電機的定子電流僅存在0.5 s左右的波動,即可快速恢復至正常電流波動狀態。實驗結果驗證本文方法矢量控制船用異步電機時,可以控制異步電機定子電流在添加負載時,快速恢復至正常值,控制性能良好。
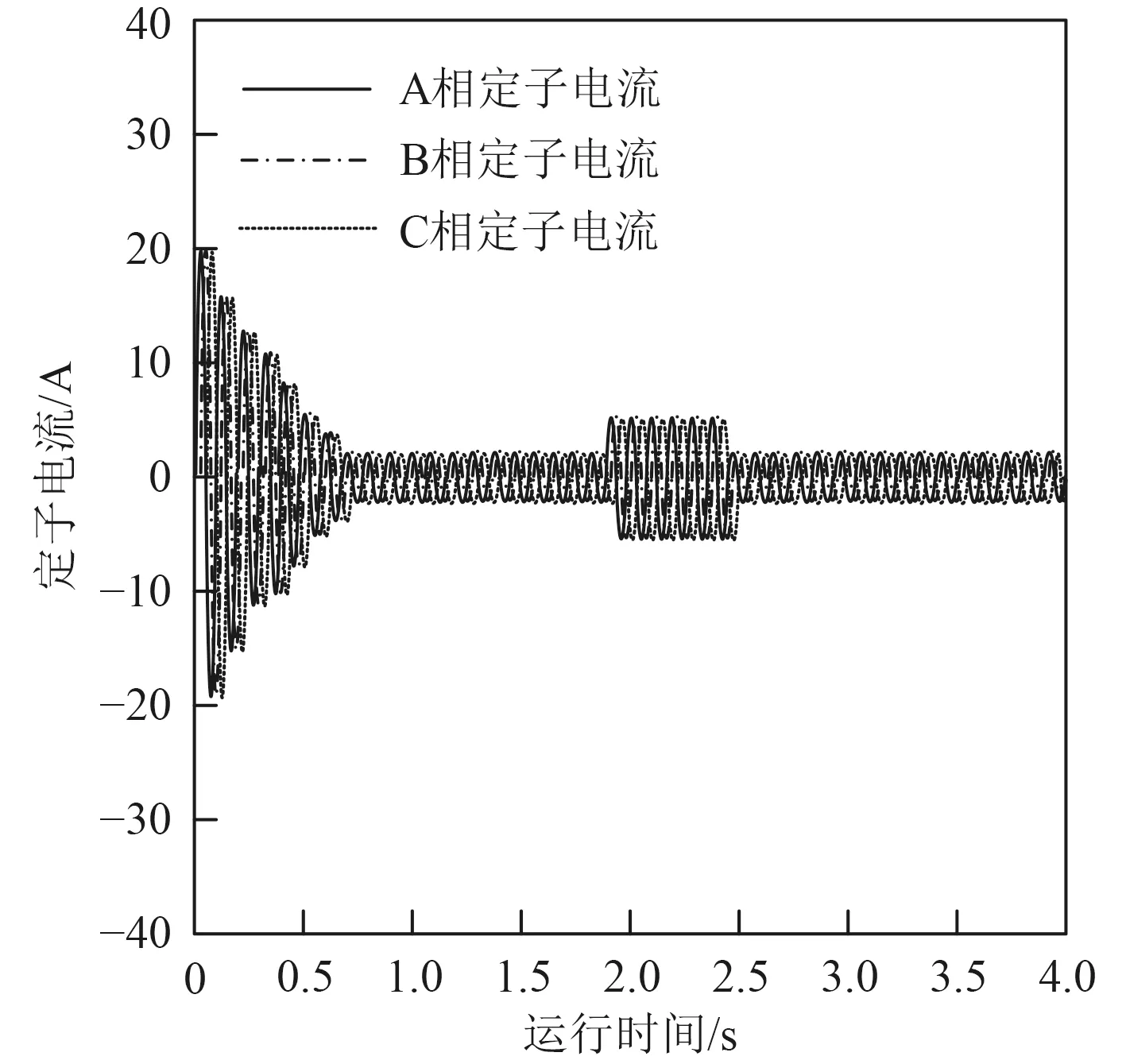
圖4 定子電流控制結果Fig. 4 Stator current control results
轉矩控制結果如圖5所示。可以看出,采用本文方法矢量控制船用異步電機時,異步電機的轉矩可以依據設定參數變化而有所變化。異步電機轉矩經過本文控制,可以快速恢復至理想的20 N·m,維持穩定狀態。
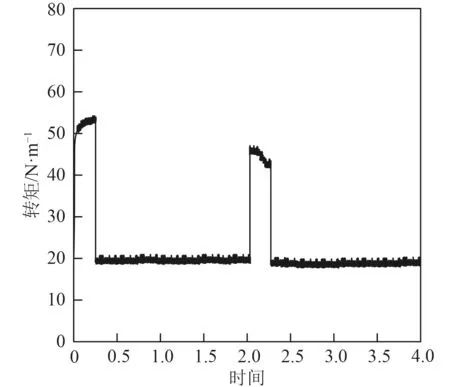
圖5 轉矩控制結果Fig. 5 Torque control results
轉速控制結果如圖6所示。可以看出,采用本文方法對船用異步電機矢量控制,添加負載時,異步電機的轉速僅存在短暫波動,即可快速達到理想轉速。船用異步電機運行環境較為復雜,本文方法可以實現異步電機的矢量控制,使船用異步電機在復雜海洋環境運行時,仍然具有較好的控制性能,滿足自適應的控制需求。

圖6 轉速控制結果Fig. 6 Speed control results
3 結 語
將數字信號處理器應用于船用異步電機矢量控制中,利用數字信號處理器的高速度運算能力,提升船用異步電機矢量控制性能。實驗驗證該方法可以實現船用異步電機的解耦控制,具有控制方式簡單,可以適應船用異步電機使用環境的高動態性能,控制精度極高。該方法屬于高性能、低功耗的控制方法,應用前景廣泛,適用于復雜的船舶航行環境中,通過高效的控制性能提升船舶航行可靠性。船用異步電機矢量控制方法,無需設置速度傳感器,即可獲取船用異步電機轉速,轉速估算精度高。船用異步電機轉速動態變化時,可以快速跟蹤電機的輸出轉速,跟蹤性能強。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
