
ROV臍帶纜水動力分析
2022-10-18 12:09:52施興華錢佶麒
艦船科學技術 2022年18期
關鍵詞:方向
施興華,曹 奔,錢佶麒,周 游
(江蘇科技大學 船舶與海洋工程學院,江蘇 鎮江 212003)
0 引 言
臍帶纜是ROV的重要組成部分,利用臍帶纜將控制臺和ROV連接在一起用于傳輸控制信號、數據、視頻、液壓和電力信號,因控制臺安裝在母船上,領航員負責遠程操控水下機器人,按照相關要求進行水下作業。在工作過程中,ROV運動、海流、海浪等因素會拉伸或擠壓臍帶纜,母船甲板也會在一定程度上磨損臍帶纜,臍帶纜還可能與船身產生纏繞導致磨損。因ROV運行會產生牽制力并作用于臍帶纜,需考慮上述牽制力等因素并全面分析臍帶纜的水動力性能。
馮現洪等研究的深水臍帶纜布局方式為懸鏈線布局,通過研究發現了一系列分布特性,比如有效張力、彎曲曲率、初始線形等,在此基礎上總結其整體結構響應。張大朋等以某拖拽系統為例,使用OrcaFlex仿真軟件完成建模過程,并通過調整關鍵參數分析其是否會影響水下拖體,關鍵參數包括回轉半徑、拖纜參數、水動力系數、拖速等,研究成果可用于指導解決具體工程問題。李泯等建立水下臍帶纜動力學模型,求解邊值問題微分方程,通過定量數值計算得到ROV攜帶自由端臍帶工況的結果和ROV攜帶分段綁扎臍帶工況的結果,可用于處理相似的工程問題。Wadi等針對自主水下機器人展開研究,借助有限元分析軟件Ansys-XFX識別附加慣性系數和阻尼力,通過對比實驗結果發現,二者基本吻合。Eng等分別從ROV舷搖、縱蕩、垂蕩、橫蕩4個自由度通過CFD方法得到附加質量的計算結果,并成功將ROV橫蕩自由度附加質量的誤差范圍控制在2%以內。
本文研究的ROV體積較小,設計下潛深度為35 m,基于ROV自身特點以及作業要求,本文將模擬近海海況下ROV的運行,探究ROV在不同運動模式下臍帶纜受到的水動力特性。運用水動力軟件AQWA獲得母船被動運動狀態下的RAO,基于AQWA軟件得到的RAO數據,利用OrcaFlex建模并進行水動力仿真,獲得臍帶纜所受到的有效張力、Strouhal頻率和纜繩位移等一系列水動力響應數據,并結合計算出的水動力性能結果提出建議。
1 ROV模型的建立
本文研究的ROV主體長度450 mm,主體寬度320 mm,主體高度260 mm,質量9.534 kg。主體如圖1所示,由1個圓柱浮體、4個導管推進器及起落架構成,可以控制升降和進退運動。采用對稱面螺旋槳的差速轉彎方式,能夠在水下實現2個自由度的轉向。根據導管螺旋槳的布置,在靜水中可以實現沿2個方向的移動和繞2個方向的轉動。由于ROV在作業時,幾乎不會進行自主的橫搖運動,所以在該自由度上的運動不做討論。

圖1 簡化的ROV三維模型Fig. 1 Simplified ROV 3D model
本文主要分析ROV在水平、垂直以及繞垂直軸旋轉3個自由度上的水動力特性。為了提高計算結果準確性,最大限度還原ROV的各部分結構,保留螺旋槳葉片、起落架、金屬把手等存在突起、尖端和小的附著物。在對螺旋槳葉片進行建模時,由于并不考慮螺旋槳旋轉對ROV產生的推力,將其簡化為無螺旋等厚葉片。ROV主尺度如表1所示。
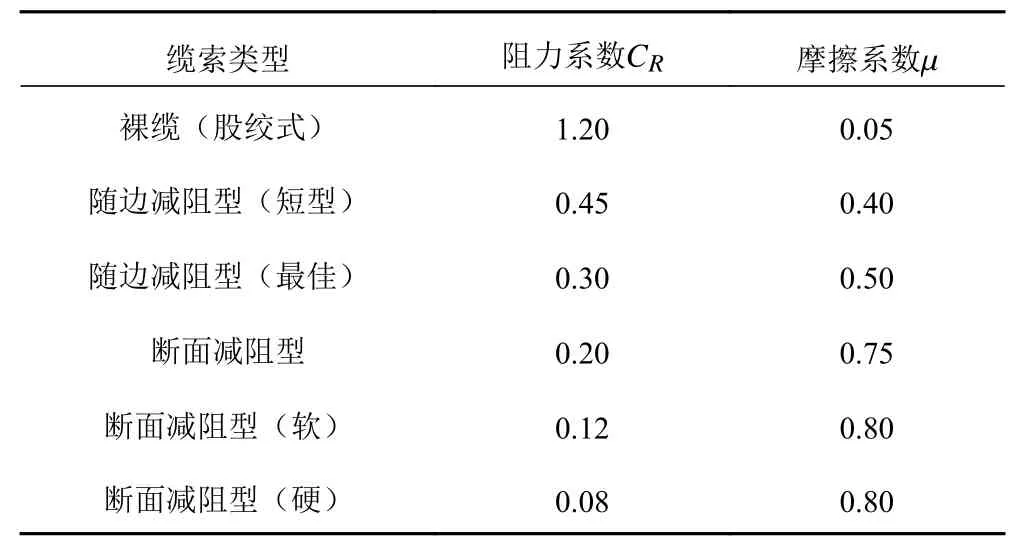
表1 典型纜索參數Tab. 1 Typical cable parameters
2 模擬工況及環境參數
借助水動力軟件OrcaFlex對ROV臍帶纜進行水動力分析,ROV自主運動帶動著臍帶纜在水下的運動。故ROV運動的深度、速度及方式對臍帶纜的影響較大。同時,臍帶纜本身的屬性也影響著自身的水動力性能。所以,選擇合適類型的臍帶纜以及海況作為模擬計算臍帶纜水動力的外部條件顯得尤為重要。
模擬工況選擇在近海海域進行,設置的波高為3 m,波浪周期為5 s。ROV在海底30 m的深處進行定速前進、后退和旋轉運動。前進和后退的速度為2 kn,定速旋轉下的工況設置3個旋轉半徑,分別為1 m,2 m,4 m,對應的旋轉一周周期分別為4 s,8 s,16 s。
3 母船與臍帶纜、ROV連接系統模型的建立
3.1 臍帶纜主要參數
首先對臍帶纜做以下規定:假設選用勻質臍帶纜,上端為入水口,下端為ROV連接點。考慮到ROV的影響,保持移動速度一定,若ROV的運動模式是水平運動,則ROV始終在垂直方向和水平方向組成的平面內運動。
同時,為了簡便計算,做出以下假設:1)臍帶纜是完全撓度的,即只收到臍帶纜張力;2)作用在臍帶纜某一單元的水動力僅取決于該單元的臍帶纜相對于水流的角度;3)臍帶纜在拖拽時忽略自由面的影響。
影響臍帶纜水動力性能的因素主要為臍帶纜與水接觸時的摩擦力。臍帶纜接觸到水后,摩擦力隨臍帶纜的不同存在一定的差異。同時,摩擦系數 是摩擦力值的關鍵參數。表1給出典型纜索的C(阻力系數)和μ(摩擦系數)的值。
結合ROV自身特點以及設定工作深度等因素,采用長度為50 m的臍帶纜,外徑為0.008 m,內徑忽略不計,法向阻力系數C為1.1,臍帶纜的摩擦系數μ為0.05。等效計算后,單位長度質量為0.12 kg/m。
3.2 系統模型的建立
所建立的系統主要由母船、臍帶纜和ROV組成,這三者連接點的選取以及連接方式尤為重要。首先,所選用的母船為一小水線面雙體船(SWATH),其參數為:總長89.6 m,型寬30 m,型深15.5 m,設計水線長86 m,吃水7.5 m,支柱中心距22.6 m,支柱最大寬度3.2 m,濕甲板高度11.6 m,排水量5580 t。圖2為母船局部截圖。
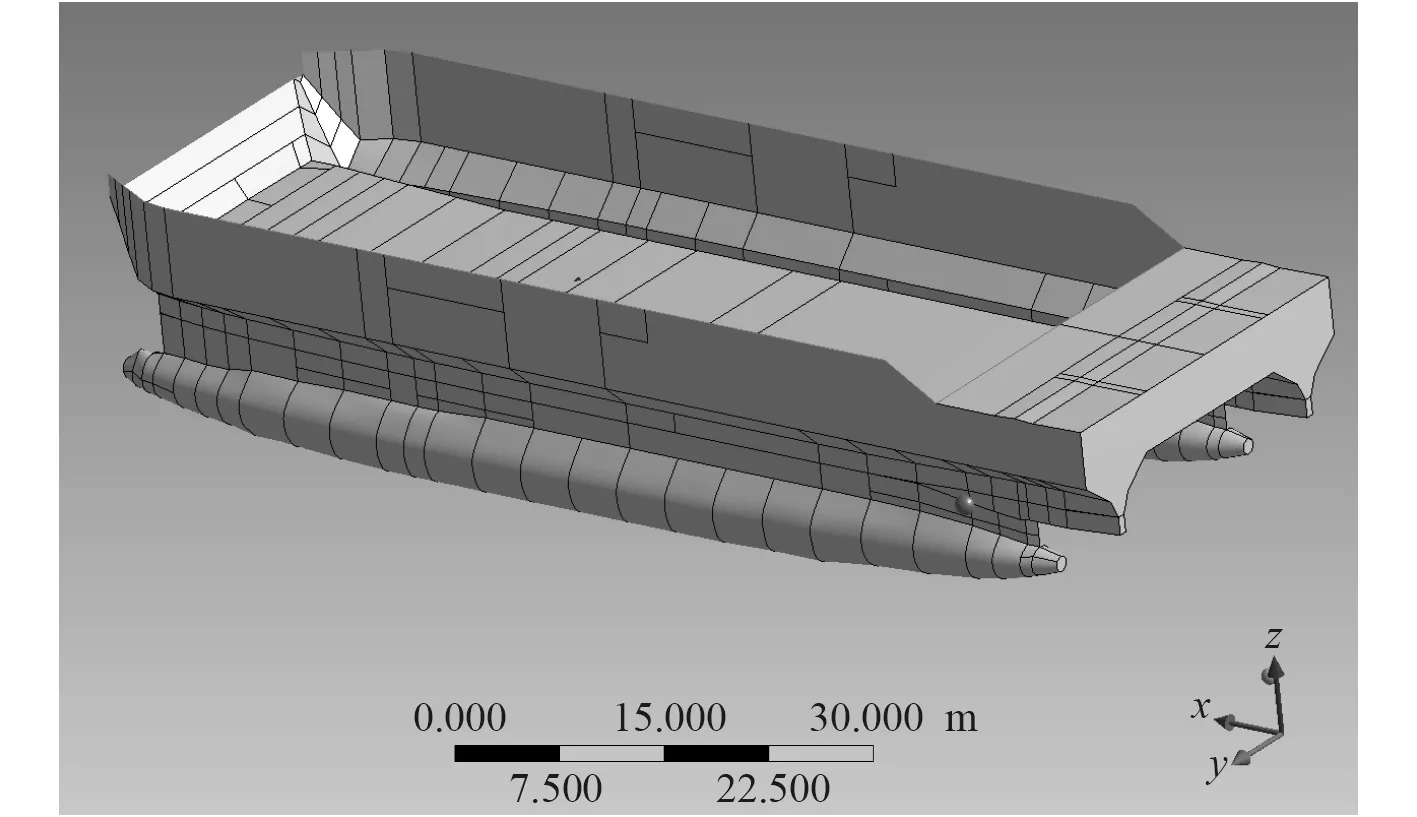
圖2 母船局部截圖Fig. 2 Partial screenshots of the main ship
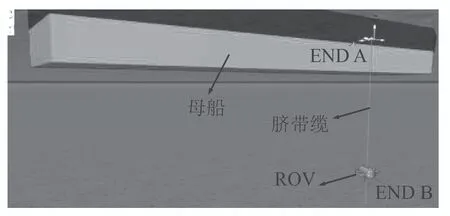
為了避免母船尾部螺旋槳產生的推力對臍帶纜的受力影響,將臍帶纜與母船的連接點設置在母船一側中央距船底部8.5 m處,即距離滿載吃水線1 m處。在母船與臍帶纜連接處,連接點的連接方式設置為自由旋轉,不考慮ROV在旋轉運動時可能對臍帶纜內部張力性能等產生的影響。臍帶纜與ROV的連接點設置在ROV長度方向130 mm,寬度方向0 mm,高度方向250 mm處,并設置ROV在距水面30 m的深度運動。所建立的系統模型如圖3所示。
RAO是影響母船運動狀態的決定性因素,母船狀態是影響系統模型上部邊界條件的決定性因素。浮體或船舶在海洋中作業的行為一般利用RAO進行求解。通常由CFD計算程序或水池試驗提供船體RAO的相關數據,需要計算船舶在不同波浪條件下的運動情況。在OrcaFlex中,母船RAO的數據一旦確定,則其運動情況也就確定了。利用水動力軟件AQWA計算不同頻域下六自由度母船被動運動時的水動力系數,并結合OrcaFlex軟件,最終確定母船的RAO數據。
4 計算結果
研究對象的母船為一艘SWATH雙體船,滿載排水量5 580 t,設定的ROV的運動深度為30 m,浪向的改變并不會對母船及ROV的水動力造成較大的影響,而流向的變化會使臍帶纜承受的動力載荷發生較大的變化。因此,必須進行不同流向下的臍帶纜水動力分析,得到臍帶纜水動力系數,以確保整個操作過程的安全與穩定。為了簡化模型和節省計算時間,忽略浪載荷以及風載荷的作用。流向選取 0°~180°,每30°取一個流向。臍帶纜與母船的連接點設置為End A,即臍帶纜長度的0 m點;水下與ROV的連接點設置為End B,對應沿臍帶纜長度方向的50 m 點。
為了對比分析臍帶纜在ROV不同運動狀態下受到的牽制力,模擬ROV的3種不同的運動狀態,即前進、后退和回轉運動,并設置ROV前進和后退的速度為2 kn,回轉半徑為1 m,回轉周期為4 s。
4.1 不同流向下臍帶纜受到有效張力
通過分析不同流向下臍帶纜的固定端(End A)和自由端(End B)受到有效張力隨時間的變化、沿纜長方向的Strouhal頻率等水動力參數,討論ROV在定速前進和后退時不同流向對臍帶纜水動力的影響。
圖4、圖5分別為ROV在前進和后退時End A與End B有效張力的時歷分布圖。可以發現,ROV在前進時,臍帶纜End A與End B端的受力圖像形態在一定程度上具有相似性,呈周期性波動,且A端的受力在相同時間上略大于B端的受力。以180°流向角為例,A端在11.6 s時達到最大值0.2737 kN,而B端在11.7 s時達到最大值0.2675 kN,最小值均在8.3 s時達到,A端為0.1492 kN,B端為0.1425 kN。這主要由于在A端連接著母船,受到浪的影響明顯大于B端,所以母船的運動狀態使得A端的受力增大。力具有傳遞性,牽制力從A端傳遞至B端過程中也會有一定的消耗。臍帶纜所受的牽制力呈周期性波動,且周期大致為5 s,與之前所設置的波浪周期一致,這和理論分析結果相一致。同時可知ROV后退時A和B兩端的受力隨時間的變化與前進時的趨勢一致。
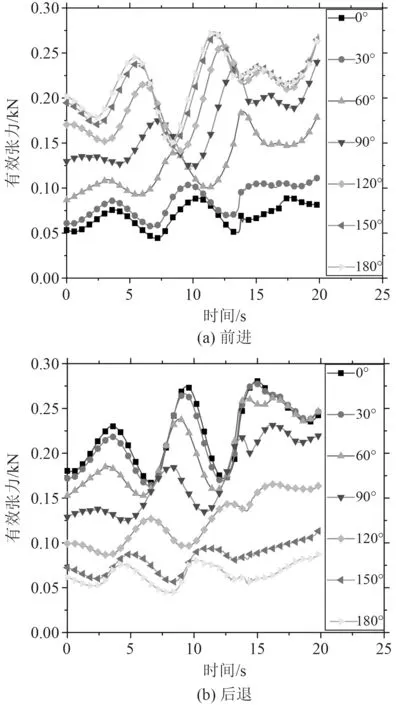
圖4 ROV前進、后退時各流向下臍帶纜End A有效張力時歷分布圖Fig. 4 The time history distribution of effective tension at the End A of the umbilical cable in each flow direction when the ROV advances and retracts
ROV在前進時,0°的流向角屬于順流,180°則是逆流。通過圖4和圖5可以看出,所取的0°~180°這7個流向角,張力依次增加,且相鄰流向角下的張力時歷分布具有相同的形態特征,符合理論研究結果。而ROV在后退時,0°的流向則是逆流,反之,180°為順流,所以在張力分布上,隨著角度的增加,張力呈逐步減小的趨勢。對比臍帶纜A端受力的2張圖可以發現,逆流時臍帶纜受力的峰值約為順流時峰值的4倍,而在B端,逆流時臍帶纜受力峰值約為順流時峰值的5倍。
ROV處于前進或后退運動狀態,臍帶纜在纜長方向的最大有效張力、最小有效張力和平均有效張力的變化情況如圖6和圖7所示。可以看出,在流向不同的情況下,臍帶纜在纜長方向的最大有效張力、最小有效張力和平均有效張力均呈現兩端受力大,中部受力小的形態,雖各自有小幅度起伏,但是變化不大。這說明了臍帶纜在ROV運動過程中受力比較均勻。受力呈現兩頭大中部小的原因在于靠近母船一端由于受到母船運動狀態以及浪、流等環境因素的影響,臍帶纜會受到較大的牽制力,而靠近ROV的一端,由于ROV的運動,以及流等的影響,這部分的纜繩受力也將大于中間部分。對比圖6和圖7,不難發現由于ROV運動方向相反,所以相同的流向下前進和后退時所受到流向的作用也是相反,ROV前進和后退流向角之和為180°的2條曲線呈現相似的形態。在ROV同一運動狀態下,相鄰流向角的有效張力也具有相似姿態。
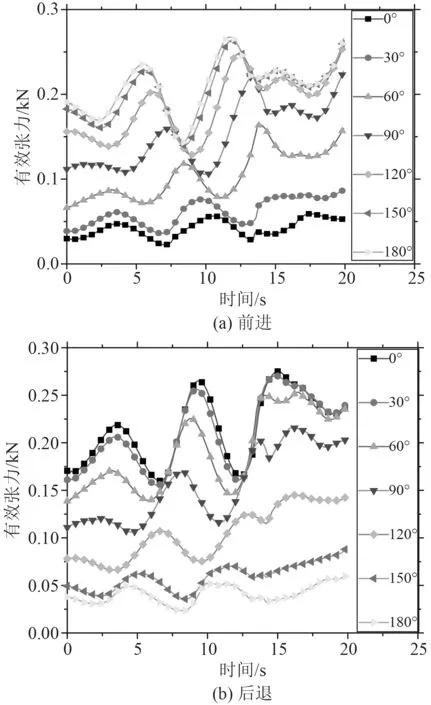
圖5 ROV前進、后退時各流向下End B有效張力時歷分布圖Fig. 5 The time history distribution of effective tension at the End B of the umbilical cable in each flow direction when the ROV advances and retracts
4.2 不同流向下臍帶纜Strouhal頻率的水動力分析
由臍帶纜的Strouhal頻率可知,在臍帶纜粗細一定的情況下,Strouhal頻率的數值越高,則水流相對于臍帶纜的速度越大。Strouhal頻率的數值大小在一定程度上也可以表示臍帶纜受母船以及ROV影響的大小。
ROV處于前進運動狀態或后退運動狀態下,臍帶纜在纜長方向的最大Strouhal頻率、最小Strouhal頻率和平均Strouhal頻率的變化情況如圖8和圖9所示。在臍帶纜直徑一定的情況下,Strouhal頻率越大,臍帶纜附近流體保持越快的速度運動,而物體做定常運動時這一參數的值為0,不予考慮。對比平均值2張圖可以看出,Strouhal頻率從順流至逆流呈增長趨勢。對比8(b)與9(b),8(c)與9(c)可以發現,在靠近母船處臍帶纜的Strouhal頻率有明顯增大的趨勢,特別是在1~7 m處也就是水面至母船船底的臍帶纜部分,Strouhal頻率出現激增,并且達到峰值時的纜長從逆流至順流依次增加。原因在于靠近母船處,母船的運動會帶動臍帶纜的運動,使得靠近船體部分特別是母船底部的流體流速明顯大于其他部位。
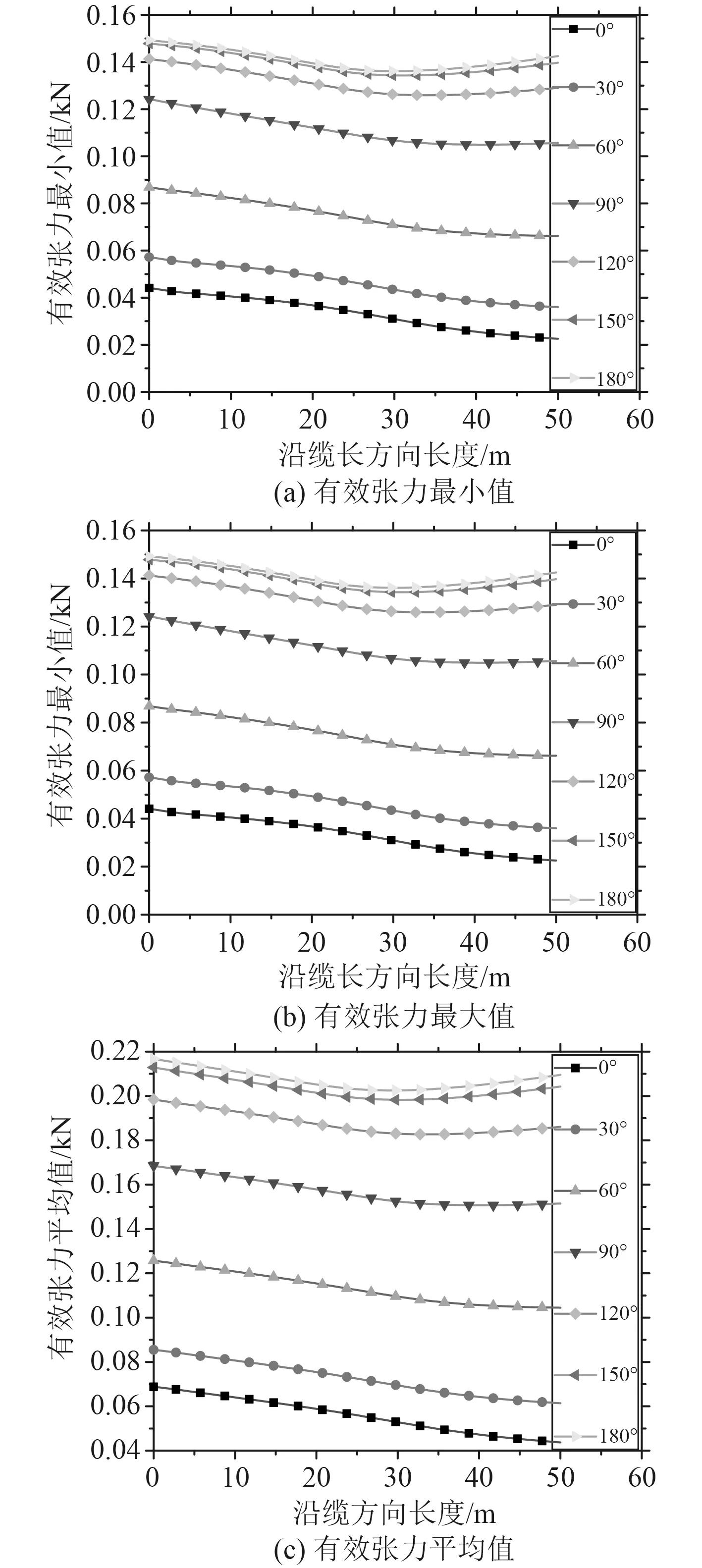
圖6 ROV前進時沿纜長方向臍帶纜有效張力變化Fig. 6 Effective tension of the umbilical cord varies along the length of the cable as the ROV adv
臍帶纜10 ~30 m區間Strouhal頻率又有一段明顯的上升,極大值出現的位置點隨著順流至逆流依次提前。這可能是由于在此區間范圍內的流體受到了母船和ROV運動的影響,流體相對于臍帶纜速度明顯增大。在逆流時此區間受到母船運動的影響較大,極大值出現的區間靠近母船,順流時則相反。在臍帶纜50 m左右的區間,Strouhal頻率較小,但也有小幅的回升,ROV在順流時回升幅度比較慢,逆流時回升幅度則相對較快。原因在于,隨著水深以及臍帶纜長度的增加,臍帶纜所受的阻力以及自重的影響也越來越大,使得流體相對流速的增加變得困難。由于ROV屬于自主運動,且運動狀態為定常運動,使得固定ROV一端的Strouhal頻率顯著降低。相鄰的2個流向角下的Strouhal頻率曲線呈現相似的姿態。
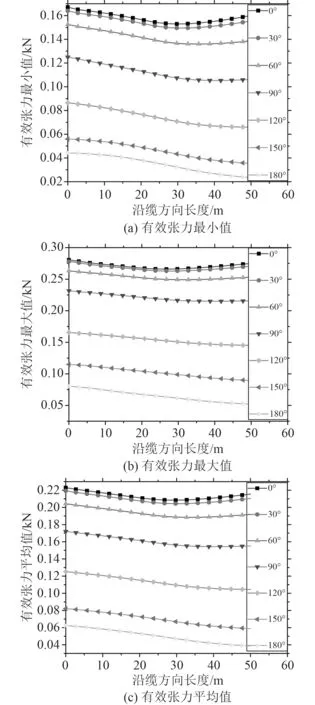
圖7 ROV后退時沿纜長方向臍帶纜有效張力變化Fig. 7 Effective tension of the umbilical cable changes along the cable length when the ROV retracts
4.3 ROV回轉運動時臍帶纜水動力分析
對目標物體的觀察是ROV執行水下任務的重要組成,為了更好地執行觀察任務,需要對目標物體進行360°的觀察。在ROV進行回轉運動時臍帶纜和其本身容易產生糾纏。臍帶狀態無法監測是導致糾纏問題發生的關鍵,同時,臍帶纜過長會增加自身承受的阻力,對此,必須掌握纜索的水下特性。因此,探究ROV在水下的回轉運動,分析臍帶纜的受力,得到臍帶纜的一系列水動力系數,為具體工程提供指導意見。

圖8 ROV前進時沿纜長方向Strouhal頻率變化Fig. 8 Strouhal frequency changes along the cable length as the ROV advances
通過建模改變ROV的旋轉半徑,實現ROV定速度的旋轉運動。設定作業工況為坐標軸正對向上,ROV做順時針旋轉兩周接逆時針旋轉2周。旋轉半徑分別為1 m,2 m,4 m,速度為1.57 m/s,旋轉周期分別為4 s,8 s,16 s。由于速度方向無法瞬間轉向,這樣違反了物理法則,所以在順時針與逆時針期間設置了一個速度緩沖區,使速度大小降為0再反向運動,速度緩沖區時間為8 s。設置的浪與流的方向均為180°。
圖10為ROV在不同半徑下旋轉時臍帶纜A端、B端有效應力變化曲線。可知,應力呈現周期性變化,周期為ROV旋轉1周的時間。A端的有效應力曲線與B端應力曲線呈現相似的形態,且A端應力略大于B端應力0.02 kN左右,這一點與前進和后退時相似。
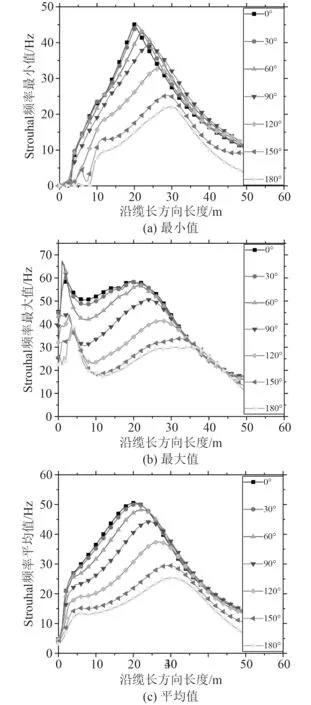
圖9 ROV后退時沿纜長方向Strouhal頻率變化Fig. 9 Strouhal frequency changes along the cable length when the ROV retracts
在開始的0.1~0.4 s內,3種半徑下的A端、B端應力曲線都發生了大幅震蕩,B端臍帶纜的受力大于A端約0.1 kN。出現此現象的原因可能是,一方面,由于ROV旋轉的方向為先順時針后逆時針,順時針啟動瞬間,ROV處于逆流,流體相對于ROV運動速度較大,以至于臍帶纜B端受力出現短時間的震蕩;另一方面,由于不同于前進和后退,在旋轉時,ROV的運動方向一直都在改變,運動速度大小也沒有達到穩定,臍帶纜會發生較為劇烈的震動。所以在ROV啟動瞬間,B端臍帶纜的受力會出現大幅震蕩,待運動狀態穩定后,該現象消失。A端受力受到B端受力的影響,也會出現震蕩,由于力在傳遞過程中的消耗,震蕩幅值小于B端。
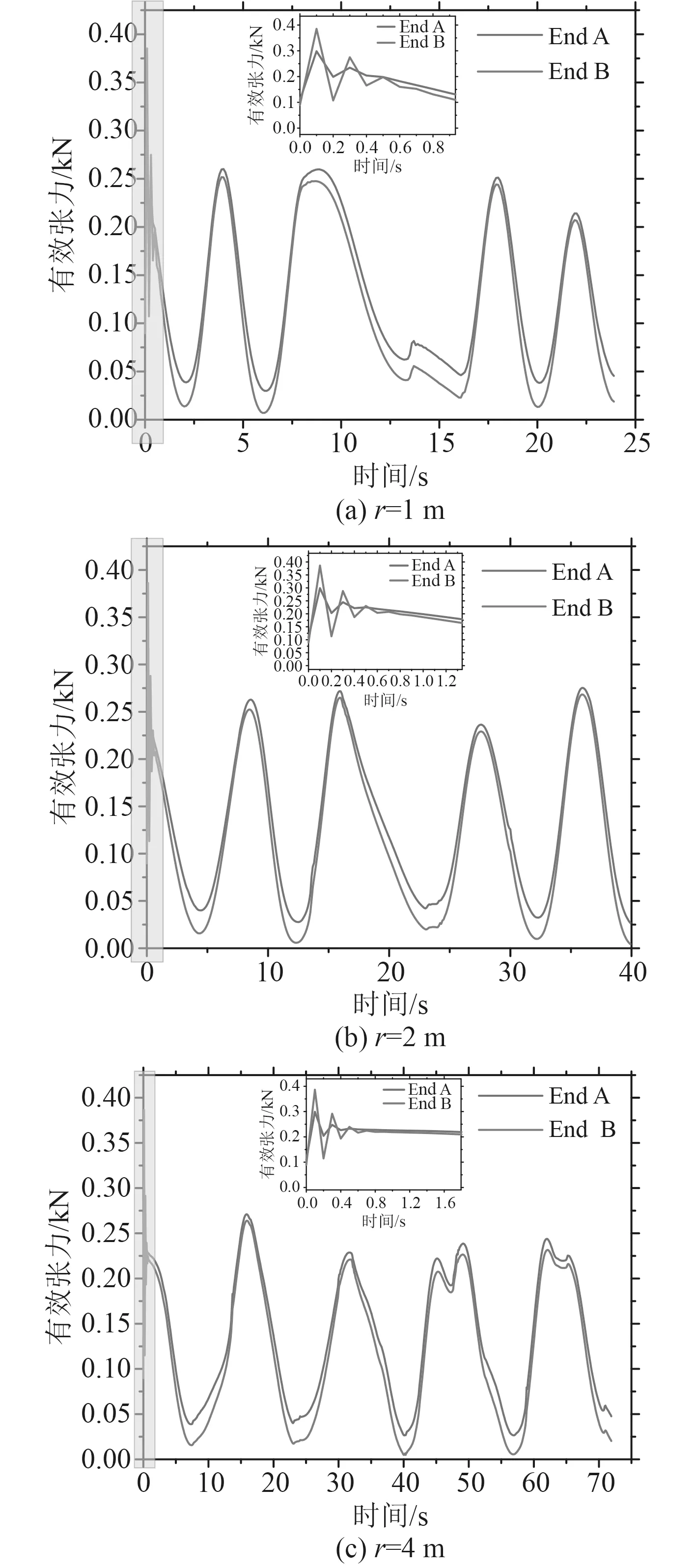
圖10 不同旋轉半徑下臍帶纜End A與End B應力變化曲線Fig. 10 Stress change curves of umbilical cord cable End A and End B under different radii
ROV在旋轉過程中,臍帶纜中點的運動軌跡在一定程度上可以反映出整條臍帶纜的運動狀態。圖11為ROV在不同旋轉半徑下,臍帶纜中點和方向的運動軌跡圖。對比方向軌跡時歷圖可以發現,曲線呈周期變化,周期大致為ROV在其旋轉半徑下旋轉一周的時間,幅值為ROV旋轉的直徑。隨著旋轉半徑的增加,速度緩沖區對方向位移的影響逐步減小。值得注意的是,若把ROV旋轉構成的圓分為四等分,則臍帶纜中點能達到最大偏差與恢復到起始位置所花的時間也被分成了4部分,但是每部分所花時間在逐漸減小。以r=4 m,第2圈順時針運動為例,4個時間分別為5.7 s,4.7 s,4 s,2.1 s。對比方向曲線還可以看出,在ROV旋轉時,經過1個周期,臍帶纜中點方向可以比較及時回到初始位置,并進行下一周期的運動。從圖11可看出,方向的軌跡也呈現周期性,并且隨著旋轉半徑的增加,周期性更加突出。方向曲線整體呈現下降趨勢,即臍帶纜中點在方向上逐漸偏離初始位置,不同于方向快速回到初始位置,在旋轉半徑為1 m,2 m,4 m時,方向同周期內回升的幅度分別僅有下降幅度的約10%,33%和40%。在各半徑的速度緩沖區內,曲線均有大幅度回升。
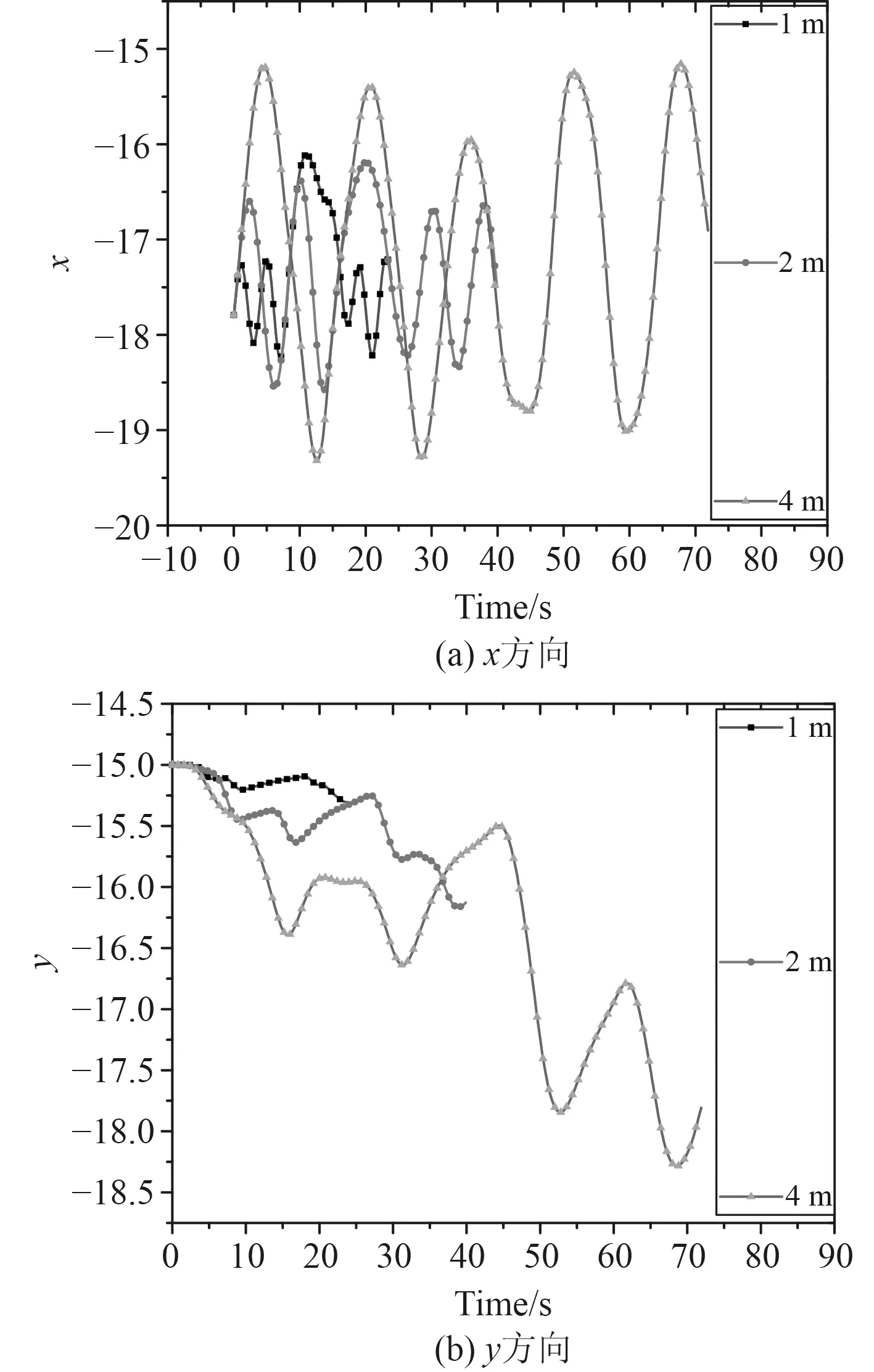
圖11 不同旋轉半徑下臍帶纜中點x方向、y方向軌跡圖Fig. 11 Trajectories in x direction and y direction of midpoint of umbilical cord under different radii
圖12為ROV在不同運動半徑下臍帶纜中點運動軌跡圖。可以發現,曲線呈現螺旋式下降的趨勢。可能的原因在于ROV開始做的是順時針運動,而流向與瞬時運動方向的切線方向同向,這使得運動的瞬間方向獲得了更大的力。由于臍帶纜在水中受到浮力、阻力等的影響,自身質量的影響相對于ROV牽引力很小,隨著ROV運動的穩定,使得方向在順流時回到初始位置的時間大幅減小,逆流時時間也有所減少。而對于方向,由于一開始受到的力很小,使得3個旋轉半徑下方向前5 s幾乎沒有改變;另一方面,臍帶纜在方向的運動相較于方向受到流體阻力明顯增加。
5 結 語
本文模擬ROV前進、后退和回轉3種運動狀態,研究了ROV在不同運動狀態下臍帶纜的一系列水動力系數,得到如下結論:
1)不同流向下,ROV前進、后退時,臍帶纜End A與End B兩端受力隨時間呈現周期性變化,周期大致為波浪的周期,End A端張力略大于End B端,且順流至逆流有效張力依次增大,相鄰流向角下張力曲線呈現相似的形態。沿纜長方向,不同流向下,張力曲線較為平緩,由于母船和ROV運動的影響,呈現兩頭大中間小的形態。有效張力遠小于臍帶纜的許用應力,滿足工程要求。
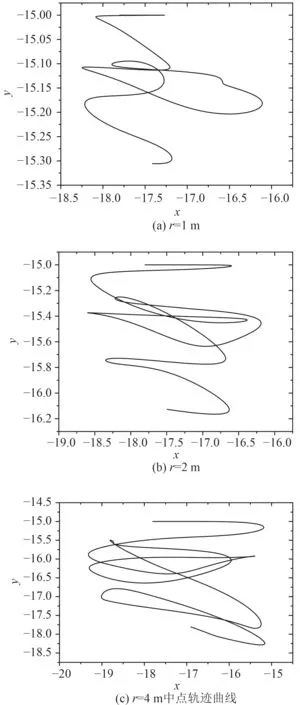
圖12 不同旋轉半徑下臍帶纜中點軌跡圖Fig. 12 Track diagram of midpoint of umbilical cord under different rotation radii
2)由于母船和ROV運動的影響,在靠近母船和ROV運動部分的流體相對于纜繩運動速度較大,進而Strouhal頻率較大。而接近纜繩底部,由于ROV運動屬于定常運動,Strouhal頻率大大降低,不過也有一定程度的回升。
3)在ROV旋轉過程中,臍帶纜兩端張力也呈現周期性變化,周期約為旋轉周期,在ROV啟動旋轉瞬間,由于運動方向及運動速度的不穩定,流體相對于臍帶纜作用力的方向及大小也會出現波動,導致開始的一小段時間張力大小出現了震蕩,不過最大張力依然遠小于最大許用應力,滿足實驗要求。
4) ROV在旋轉時,由于流向的設定,臍帶纜中點方向能較快回到初始位置。而方向,由于相較于方向受到的阻力明顯增大,導致在方向有不斷偏移的趨勢。這從側面反映出該工況下整條臍帶纜隨著ROV的旋轉有被拉伸的趨勢。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
