基于車載中控系統的輻射環境監測車設計
2022-10-18 01:25:42譚煒周建斌方方
核科學與工程 2022年3期
譚煒,周建斌,洪 旭,方方
(成都理工大學 核技術與自動化工程學院,四川 成都 610059)
核事故對核電的發展產生巨大影響,核應急輻射環境監測工作是核應急工作的重要組成部分,車載移動監測系統具有機動能力強、反應迅速、獲得輻射環境強度分布數據等特點,已成為輻射環境安全監管的重要手段[1]。
美國RSI 公司設計的RS-700 是完整的一套伽瑪射線放射性探測和監測系統,系統內置了GPS 接收機,使用運行在PC 端的RadAssist 測量軟件進行控制、監控和記錄數據。加拿大 PEI公司設計的PGIS-2 系列便攜式伽瑪光譜系統,用內置GPS 導航,通過手持平板藍牙與設備通信,該設備體積小,可以通過手持或應用在航空伽馬能譜領域。加拿大SAIC Exploranium 公司設計的GR-460 車載放射性全譜測量系統,將包含4 L 的NaI 探測器放入車頂,一臺512 道譜儀,內置GPS 接收機,使用一臺軍用筆記本電腦接收數據。核工業北京地質研究院研制了具有GPS 定位功能的CZ-256 型多道車載伽瑪能譜測量系統,并及時應用于環境監測,取得了較好的效果。上述輻射環境監測車方案設計思路是將完整的重量級系統或輕量級安裝在汽車上,布置單獨的測量儀器。探測器接入車身后可充分使用車載系統的準確數據,如汽車行駛姿態,車載定位,速度,里程等[2-5]。
設計一臺核輻射環境監測車。該設備包含六個一體式NaI(TI)探測器,可以對環境中伽馬射線進行探測。各個探測器通過CAN 總線接入車輛的中控系統。基于車輛中控系統,編寫輻射環境監測軟件,實現各探測器數據實時處理。結合車輛行車定位功能,標記實時輻射測量結果,最后繪制區域輻射水平效果圖。
1 方案及設計
核輻射監測車基于現有的車輛安裝多個探測器,通過總線接入到汽車網絡,修改當前車載多媒體系統軟件完成。設計過程包含探測器分布、CAN 總線接口、軟件設計、數據處理四個部分。
1.1 探測器布置
如圖1 所示為探測器安裝圖,在一臺車上放置6 個一體式探測器形成多方向探測,頂部安裝4 個較小體積探測器,通過行李架安裝在頂部方向分別朝左前,右前,左后,右后,可探測4 個方向能譜,可探測不同視角,用于探測距離較遠,容易被阻擋的伽馬射線。在后備箱中安裝兩個大體積一體式探測器,增加探測效率,用于探測地面的伽馬能譜。每個探測器可以獨立工作,各個探測器通過四芯線纜并聯,探測器由中控系統提供5 V 供電,通過CAN 總線接入到車載多媒體系統。如需要增加探測器,只需要將新加入的探測器的5 V 供電及CAN 總線并聯到系統即可。
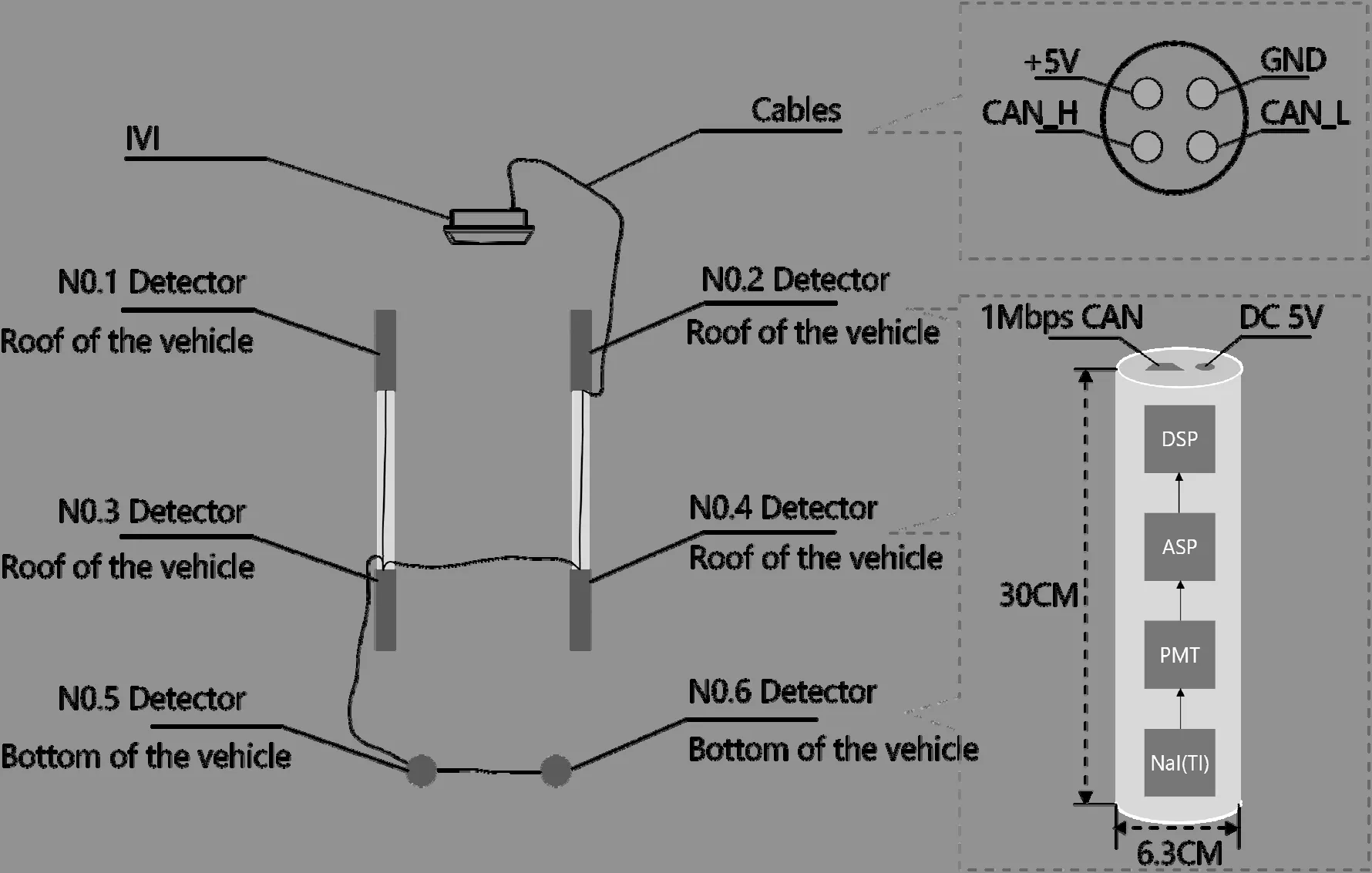
圖1 探測器安裝圖Fig.1 Detector installation diagram
探測器選用四川新先達測控技術有限公司生產的一體式智能探測器。每個探測器內置數字多道脈沖幅度分析器(DMCA),能夠生成1 024 道能譜數據,并通過1 Mbps 速度的CAN總線接口輸出[6]。探測器內置計數及緩存,總線的延時不會引起死時間及同步問題[7]。探測器工作電壓為5 V,平均電流約為200 mA,6個探測器同時工作功耗約6 W,車載中控電源系統滿足探測器的供電需求。探測器工作溫度-20~80 ℃,外殼為鋁合金屬,IPX8 級防水,能在環境較苛刻的條件下完成探測工作。探測器為圓柱形,長30 cm,直徑約為10 cm,便于在汽車上安裝,可以滿足車載監測系統的探測需求。
1.2 CAN 總線接口
探測器數據通過CAN 總線接入到車身網絡中,車身CAN 總線在數據傳輸過程中更加穩定可靠,使探測器與整車成為一個整體。
在汽車領域中,車內有多個電控單元,如引擎控制單元,傳動控制單元,安全氣囊,ABS等都影響汽車正常行駛安全性。這些模塊單元都是單一的子系統,模塊之間通過CAN 總線互連,形成汽車CAN 網絡,網絡分為不同的總線分支,每個分支連接到汽車網關模塊,降低車內電子系統部件復雜度,增加模塊之間通信的可靠性[8]。
探測器通過車載高速CAN 總線接入到娛樂總線中,總線速度為1 Mbps。探測器與車載多媒體系統通過私有CAN 協議進行數據交互,車載網關不處理轉發該CAN 數據,不影響整車其他網絡總線的數據,如圖2 所示。
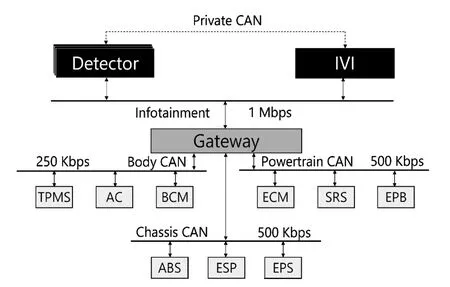
圖2 汽車CAN 網絡Fig.2 Vehicle CAN network
1.3 車載中控系統平臺
汽車多媒體系統與傳統的電腦、PC、手機等不同,其整個系統設計需要符合汽車規范的認證標準。在硬件上需要使用符合汽車規范的電路及電子器件。在軟件上使用高度定制的軟件系統,在安全規范中符合汽車規范安全等級認證,圖3 為系統框圖。
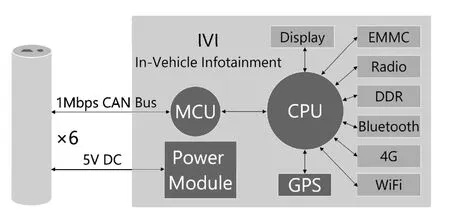
圖3 車載多媒體系統框圖Fig.3 Architecture of IVI
設計過程可以分為兩個板塊:
(1)MCU 板塊。MCU 控制著整個硬件系統各個狀態,管理電源,與各個外設通信。如方向盤按鍵,收音機控制,總線數據處理等。其中CAN 數據模塊由CAN 控制器與CAN 收發器組成,用于接收CAN 總線上的所有數據。MCU 運行RTOS 系統,在該系統中,運行多個任務,如CANTask、PowerTask,WakeupTASK,InputScanTASK,BUSTask 等,對CAN 數據進行解析及處理運行在CANTask 任務中,分為私有CAN 處理,UDS 診斷及網絡管理。在私有CAN 數據處理中,通過CAN_ID 來識別數據來源,以區分是來自探測器還是車身其他單元。數據與CPU 交互放置在BUSTask 中,該任務會檢查緩存區是否有數據需要發送,如果有,將數據通過內部總線發送并清空緩存區域。
(2)CPU 板塊。它是整個系統的核心模塊,用于人機交互及復雜邏輯運算。中控系統擁有穩定的軟件系統環境,可獲取與汽車相關的數據,如汽車速度,行駛里程等車身數據。內置車載GPS 定位模塊,可結合車身數據計算汽車的姿態及位置。CPU 運行Android 系統,該系統屬于高度定制的操作系統,移除部分標準Android 服務,增加了車機上所需的服務及相應的API[9]。車機上運行著多個應用進程,如藍牙,收音機,視頻,圖片,倒車后視,設置等。
2 軟件設計
軟件設計主要工作是對當前穩定的軟件系統增加或修改功能,現有的軟件系統架構如圖4 所示。軟件設計主要可分為兩個部分。
2.1 數據傳輸
如圖4 所示,對探測器數據獲取、解析、傳輸是由MCU 完成的。MCU 運行著多個任務,對私有CAN 數據的處理在CANTask 中,在該任務邏輯中增加6 個測器探測器數據通道,收到數據后先解包,再進行組包,最后放到發送緩存中,BUSTask 檢測到有數據需要發送后,會及時將緩存的數據發送到CPU。
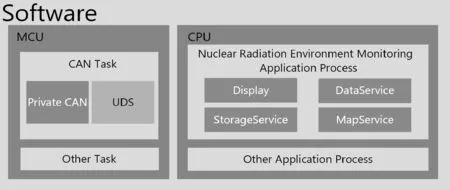
圖4 車載多媒體軟件框圖Fig.4 Software architecture of IVI
探測器每次收到數據請求后,才會將1 024道能譜數據返回多媒體系統軟件。總線上一次只能傳輸一個探測器數據,系統對6 個探測器通過輪詢請求的方式依次獲取數據。
探測器內置的DMCA 已將數據進行組包。CAN 總線傳輸一幀數據為8 個字節,探測器每次返回共258 幀數據,共2 064 字節,其中8個字節為幀頭部,8 個字節為測量時間,2 048字節為1 024 道數據。
MCU 收到探測器的數據,將連續的258 幀數據放入到緩存中。為保證每次數據快速傳輸,防止數據延時,不影響車機其他功能的正常使用,系統規定MCU 向CPU 每次最多只能發送256 個字節的長度。探測器一次數據返回為2 064 字節,超過了單次向CPU 發送的數據長度,需要對數據進行組包及解包,本方案通過自定義協議進行組包,組包通過包頭編號來確定,一共17 個數據包,解包時通過包頭編號進行數據還原,如圖5 所示。組包完成后,將17個數據包依次放入發送緩存中。
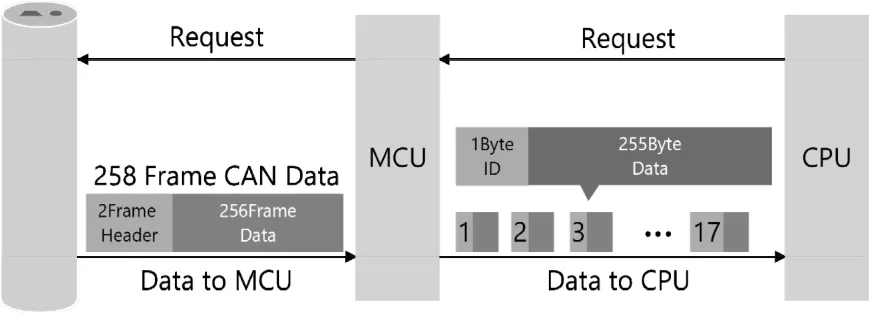
圖5 數據傳輸過程Fig.5 Data transfer process
2.2 數據處理及顯示
數據的顯示及處理主要由CPU 完成,基于車載Android 系統設計一個新的應用程序,該應用包含一個顯示層,多個服務層。
(1)數據服務通過調用系統接口獲取數據,包括車載GPS 數據,汽車的速度、里程,探測器數據包等。根據協議對探測器數據進行組包,將6 個探測器數據放到系統緩存中。
(2)存儲服務用于管理數據庫,將測量時間、探測數據、GPS 數據實時寫入本地數據庫。為保證數據完整性,在系統開始采集后,數據服務及存儲服務會一直在后臺運行,即使用戶切換到其他應用,數據仍會持續采集傳輸,保證整個采集過程數據不會丟失。測量完成后,可將數據庫拷貝至U 盤,方便后期進行數據分析。
(3)地圖服務通過調用第三方地圖(百度地圖)接口,在地圖模式下進行地圖繪制,軌跡繪制,形成分布圖,在分布圖中,系統會實時顯示當前劑量率,當前劑量率K(單位:nGy/h)的計算方法為:

其中:T——測量時間,s;
dataij——第i個探測器j道計數值,劑量率與6 個探測器全譜計數率呈線性關系;
L——該線性關系一個系數,本文稱之為劑量系數。
劑量系數可以在系統設置里面修改,當增加或者減少探測器時,劑量系數需要根據標定情況手動進行調整。
每隔1 分鐘,系統會保存一個劑量率值K′(單位:nGy/h),K′的計算方法將公式(1)中的T=60,dataij為第i個探測器j道60 s 內的增長計數。并作為一個標記點顯示在地圖上。
(4)顯示服務在測量模式下通過Android圖形引擎繪制數據波形,可通過觸摸手勢對波形進行縮放、移動,直觀的顯示能譜圖。
在測量模式下查看單個探測器詳細能譜圖中,系統收到某個探測器數據后,對數據進行分析處理。首先將1 024 道數據通過濾波去噪,其次進行曲線光滑,然后通過對稱零面積變化法進行尋峰,從而自動判定峰位。可通過能量刻度判定峰位能量,達到識別核素的目的[10]。
測量軟件與多媒體其他軟件互不影響,用戶在測量過程中可以隨意切換多媒體娛樂系統其他軟件與測量軟件。
3 試驗及功能
準備一臺定制車輛,軟件設計并測試完成后,將MCU 及CPU 系統軟件打包,通過OTA升級將車輛IVI 系統軟件更新成含有定制程序的系統。升級完成后,檢查系統軟件版本,確保軟件正確。
將各個探測器設備安裝在指定位置,通過線纜將各個探測器接入到汽車CAN 網絡中,車輛ACC 上電后,中控系統自動啟動,通過點擊系統操作系統主頁菜單中的輻射監測系統入口圖標,啟動輻射監測系統程序,進入系統主頁。如圖6 所示。
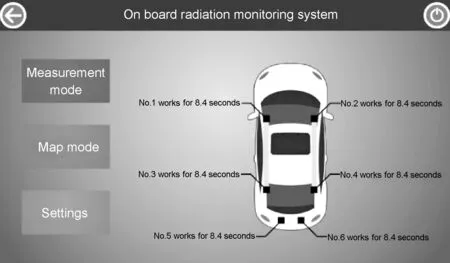
圖6 系統主頁界面Fig.6 System home page interface
在系統主頁工作界面上,左側三個菜單分別進入測量模式,地圖模式以及系統設置。右側顯示各個探測器的狀態,可主動開啟或關閉某個探測器,當系統正在工作時顯示各個探測器的工作時間。整個系統界面分為導航欄和系統工作界面,導航欄用于控制各個頁面的跳轉,顯示當前系統狀態信息以及系統測量的開關。
主頁上點擊系統設置,進入系統設置界面,如圖7 所示。由于系統的各個探測器為獨立工作的探測器,每個探測器參數上存在一定的差異,對探測器參數設置上需要對每個探測器單獨進行設置。左側點擊某個設備可以對單個設備進行設置,點擊頂部的整車設置按鈕可以對所有的設備進行相同參數的設置。
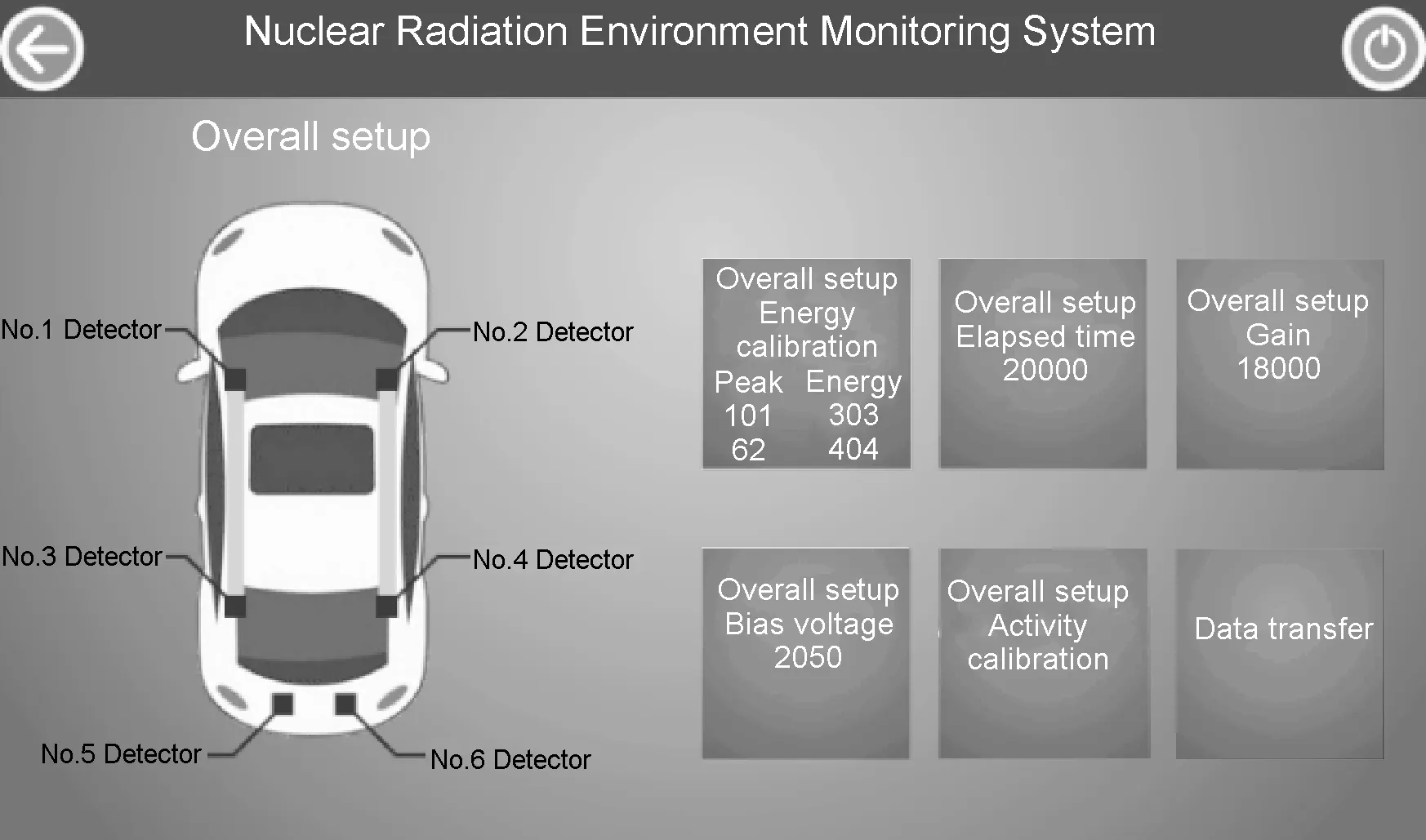
圖7 系統設置界面Fig.7 System setting interface
準備一個已知活度的137Cs 和60Co 源,對NaI(TI)探測器進行能量刻度及效率刻度,設置能量刻度參數及效率刻度參數。并對各個探測器進行其他參數設置,主要包含調增益及偏置電壓使探測器處于最佳工作狀態、設置各個探測器的測量時間。返回主頁,參數設置及車輛準備工作完成。
將車輛行駛至需要測試位置的起點處,車輛發動,進入系統,在主頁上將6 個探測器全部打開,點擊右上角開始測量按鈕探測器開始工作。駕駛車輛按照規劃路線行駛,系統將自動記錄數據并存儲到本地。
在行駛過程中,操作員點擊測量模式,在一個界面中顯示6 個探測器實時譜線概圖,如圖8 所示。由圖可以看出各個探測器的譜線大致形狀保持一致,各個譜線還有一定的差別,符合本底能譜的特性。點擊各個概圖后會彈出全屏窗口用于顯示詳細譜線圖。
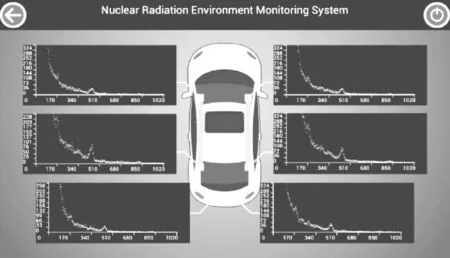
圖8 測量模式界面Fig.8 Measurement mode interface
在詳細普線圖窗口中,系統通過譜線圖自動識別峰所在位置,通過道值判定峰能量,將識別的核素顯示在圖中。
如圖9 所示為龍潭工業園區域本地能譜圖,由圖可以看到在測量大約900 s 時,自動尋峰判定到440 道出現峰值,并識別其能量大約為1.46 MeV,判定為40K,在相應的峰上會顯示出是何種核素。從系統識別的譜線圖來看,屬于天然本地放射性物質,與實際環境符合。
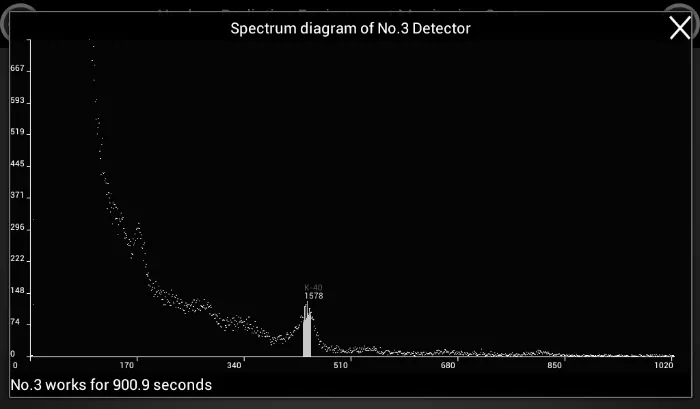
圖9 測量模式探測器詳細譜圖Fig.9 Detailed spectrogram of measurement mode of detector
在行駛過程中,操作員點擊地圖模式,查看行車軌跡圖,系統會根據一定時間間隔,統計該區域的劑量率(單位:nGy/h)。如圖10 所示為龍潭工業園區某條軌跡路線及該段軌跡的劑量率。由于該區域無高濃度放射性物質,因此該路線各個區域劑量率值差距不大,符合當前城市道路環境。
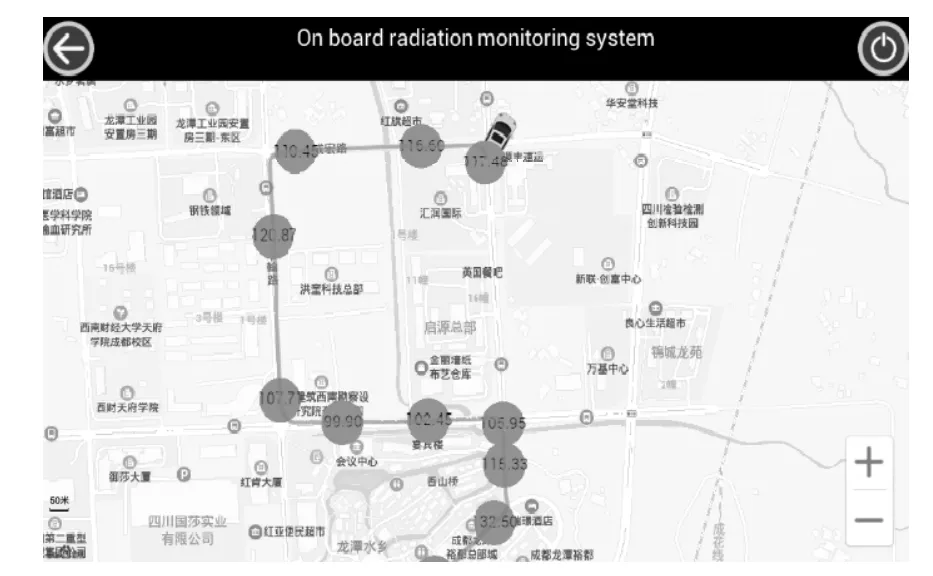
圖10 地圖模式界面Fig.10 Map mode interface
4 結論
本文所設計的車載核輻射監測系統探測器接口設計,能夠將探測器布置在車上各個位置,通過CAN 總線將數據傳輸到汽車中控中,可以通過汽車的供電模塊讓探測器處于穩定的工作狀態。
系統可以接入到車載CAN 網絡中,通過私有CAN 協議與中控系統進行數據交互。定制后的軟件系統可以正常在車載多媒體系統上穩定運行。數據總線穩定可靠。
在路試過程中系統及探測器穩定運行,系統可以正常顯示環境中能譜圖,并能自動識別峰位并判定是何種核素。系統能通過GPS,速度表,里程表顯示準確的行車軌跡圖,能在地圖上標識出各個行車路線區域劑量率。
核輻射監測車探測器與汽車成為一個整體,探測器通過CAN 總線將數據接入到車載網絡,利用車載多媒體系統進行數據處理,達到了預期的效果。本設計能進行輻射移動巡測,在核輻射環境及核安全領域有著重要意義。
致謝感謝成都理工大學及四川新先達測控技術有限公司周建斌、方方、洪旭、馬英杰、萬文杰、韓旭等在本系統中給予的建議及良好的測試條件。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21