基于Arduino的仿生探索機器人設計與實現
2022-10-18 09:48:29陳信華殷建王夢波黃健
電腦知識與技術 2022年25期
陳信華 殷建 王夢波 黃健


摘要:該文設計了一款能夠實現探測、偵察、定位、救援等復雜功能的仿生探索機器人,其以自然界生物蝎子的運動形態為參照,能夠實現自主行走、避障和夾取貨物等功能。該裝置運用Arduino單片機來作為控制核心進行仿生探索機器人的自主控制,通過樣機的實驗驗證,該裝置能有效完成特定的探索救援任務,是一款多功能的探索機器人裝置。
關鍵詞:仿生探索機器人;Arduino單片機;自主控制
中圖分類號:TP311? ? ? ? 文獻標識碼:A
文章編號:1009-3044(2022)25-0067-03
開放科學(資源服務) 標識碼(OSID) :
1 引言
隨著機器人技術的發展,各類形態的仿生機器人也層出不窮,它們能在一定程度上模仿動物運動形態來完成某些特定任務。仿生探索機器人除了具有一般機器人的功能外,還能進行救援、探測等復雜功能[1-2]。針對仿生探索機器人的研究已成為一個熱點問題,眾多學者設計并不斷擴展其功能,增加其實用性[3]。基于此,本文設計了一款模仿蝎子運動形態的仿生救援機器人,其采用Arduino單片機來作為控制單元,以舵機、連桿、絲桿、尾巴、鉗子、殼體等功能性結構組成的機器人可靈活實現預期的探索、救援、圖像傳輸以及自主避障功能。
仿生探索機器人是具有自主決策和運動能力的仿生機構[4]。隨著科學技術的發展,仿生探索機器人廣泛應用于工業制造、軍事制導、海洋勘探、月球探測、民用等方面[5-6]。其在人類社會生產生活中的作用越來越大,尤其在一些特殊領域,更是發揮著巨大的價值。如在一些中小煤礦及銅礦采選中,其檢測設備相對落后,存在發生危險的情況[7]。仿生探索機器人可以很好地代替人員來完成現場的偵察救援工作,可以通過通信服務實時傳輸災害現場情況,同時可以將緊急救援物資如藥物等第一時間送達現場。在一些自然災害如地震環境下,包括仿生探索機器人在類的各類機器人都有較高的應用價值,所以對其展開設計研究是十分有價值的。
2 總體設計及創新點
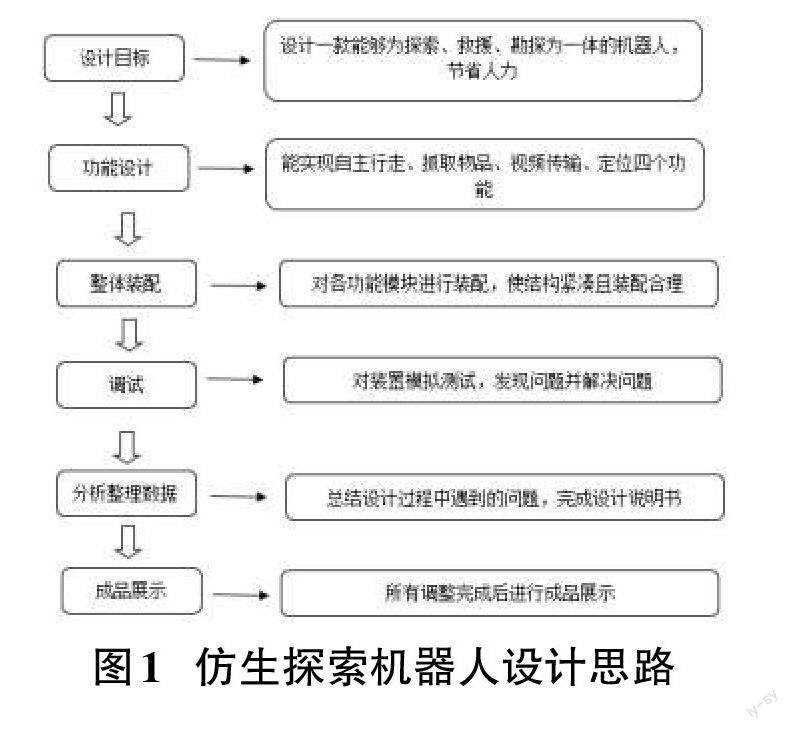
本設計主要分為硬件和軟件兩部分,硬件部分是由Arduino控制板、視覺傳感器、距離傳感器、空氣質量監測傳感器、GPS定位模塊、Wi-Fi模塊、機械絲桿抓手以及3D打印零部件構成;軟件部分是由硬件功能程序和軟件設計程序構成。具體設計思路如圖1所示。
該系統采用Arduino Mega 2560開發板來作為控制器,通過串口通信方式將各個傳感器連接到Arduino單片機用于信息傳輸。同時利用Open MV進行視覺識別,利用ESP32 Wi-Fi模塊,進行圖像實時傳輸,這樣能夠更好地了解到設計作品工作周圍的環境。該仿生探索機器人能實現自主行走、抓取或采集物品、識別物體、定位作用,同時還能識別空氣質量,材料上采用輕質材料減輕重量,在保證效率的情況下盡可能減小體積。
該設計存在以下三個創新點:
(1) 擁有18個自由度,能夠模仿多種不同的步態實現跨越、攀爬等動作,具有較高的靈活性。
(2) 實現了多種機構配合工作,通過使用不同末端執行器配合工作能夠完成復雜任務,且保證產品具有較精確的動作。
(3) 產品應用了機器人視覺,實現了對物體的識別并且利用Wi-Fi遠程數據傳輸,實時對產品周圍環境進行監控,大大提高了產品工作時的準確性和可靠性。
3 機械結構設計
仿生探索機器人的機械結構主要由機體、行走機構、尾部機構以及前端夾爪機構等部分組成。其中機體作為主要的承載單元,用于放置控制器Arduino 單片機、部分舵機以及電源等組件,采用中空及上下夾層的設計方式,結構緊湊靈活。另外三種運動機構模仿蝎子形態構建而成,三者相互協作,共同完成既定任務。
3.1 行走機構
探索機器人的行走機構是由六只獨立的三關節仿生腿組成,各仿生腿在三個關節處安裝有驅動舵機,能夠實現腿部的三個自由度運動,用于控制腿部擺動及行走功能。其柔性關節和足部結構的組成使探索機器人具有完整的運動范圍,受力合理,結構靈活,可以在多地形地面行走。Arduino Mega 2560擴展版上的pwm引腳口控制三個270°舵機,腿根處舵機控制整個腿的前后運動,關節處舵機控制連桿上下運動,連桿處舵機控制腳尖左右運動。腿根處結構向前運動的同時關節和連桿處結構向上運動,然后通過在軟件中編寫相應的程序以實現六只腿分別按照不同的運動順序運動,實現步態模擬,其設計結構如圖2所示。
3.2 尾部機構
尾部機構的設計思路是將其安裝在仿生探索機器人的尾部,并穿過機體將夾爪置于前方用于抓取貨物。桿臂的設計方案可選用平面連桿機構和舵機機構兩種,如圖3所示。
對比兩種機構發現,平面連桿機械臂采用連桿連接方式,優點是連接穩固,且抬起手臂更加輕松,缺點是轉動時不夠靈活,自由度較低。舵機機構是采用舵機作為關節連接點,優點是轉動靈活、自由度高,缺點是抓取較重物體時,舵機驅動力不足,但是可以通過設計彈簧機構來增加其夾取的物體重量。綜上選擇舵機機構來作為探索機器人尾部的主要結構。
尾部機構的運動是由舵機進行驅動,支持尾部旋轉、抬起和落下等功能。尾部夾爪采用3D打印并組裝起來,其結構采用多爪連桿并聯機構,能夠實現多爪同步地閉合張開。夾爪跟絲桿和彈簧機構緊密配合,使得夾爪可以按照指令讓其張開閉合,并配合彈簧機構將指定物體抓起來放置于特定位置。使用總線舵機控制板和Arduino mega2560進行硬串口通信,控制三個總線舵機實現尾巴的運動;尾巴夾爪使用Arduino mega2560 擴展版上的pwm引腳口控制360°舵機,利用絲桿正反轉控制夾爪開合。絲桿和360°舵機用聯軸器聯接,舵機正轉帶動絲桿正轉,滑塊向外推進,進而使得夾爪張開,反之滑塊向內推進夾爪收縮。
3.3 前端夾鉗機構
探索機器人前端兩側安裝有齒輪夾鉗機構,通過Arduino mega2560 擴展版上的pwm引腳口控制270°舵機,來實現夾鉗機構的閉合和轉向功能。夾鉗機構采用對稱形式布置,可以實現兩個鉗子相互配合進行夾取。該設計方式可解決物體太大單個夾鉗難以夾取的問題。270°舵機和鉗子下葉連接,舵機旋轉一定的角度,下葉和上葉通過齒輪傳動實現開合。其結構如圖4所示。
4 功能測試及調試
4.1 Open MV識別的準確率測試
作者前期在互聯網和生活中搜集大量的圖片,導入識別程序,通過對數據的分析得到識別準確率問題,并且找到識別不準確的物體特征,優化算法,針對識別的不準確的圖片進行處理,以增加識別準確率。圖像采集模塊主要由Open MV攝像頭通過串口通信連接Arduino單片機,傳輸采集顏色的對應參數,以便Arduino能夠控制舵機轉動,從而讓仿生探索機器人夾起物體并移動。將Arduino和Open MV的程序寫好之后,從Open MV發送測試信息到Arduino,在Arduino終端調試輸出,查看能否接受信息,若能夠接受信息,則正常;反之,修改程序,直至能夠正常通信。
4.2 舵機測試
首先對探索機器人單腿舵機進行測試,通過調試程序使得單腿能夠自由實現擺動和升降;然后調試多腿舵機使各腿部結構能夠相互協調運動,實現行走步姿;最后調試尾部及夾爪舵機,用舵機和絲桿帶動尾巴移動,通過控制舵機正反轉實現物體的夾取和放下。
4.3 裝配及調試
將設計好的零部件制造及3D打印出來,然后進行裝配調試,其實物組裝如圖5所示。經過測試該仿生探索機器人能夠很好地完成指定的行走及夾取任務,表明該設計方案合理,功能設計較完整。
5 總結
本文基于Arduino單片機,集成視覺、檢測、定位等傳感器模塊設計了一款仿生探索機器人,用于在特定環境下完成救援、探測等任務。該機器人主要功能如下:
(1) 利用Open MV可以進行視覺識別,同時利用ESP32 Wi-Fi模塊進行圖像實時傳輸,能夠更好地了解到產品工作周圍環境。
(2) 通過各類傳感器,根據產品具體的工作環境進行周圍環境檢測。如,通過氣體傳感器可以測量出二氧化碳、一氧化碳和甲烷氣體含量,再通過遠程數據傳輸實時監測。
(3) 整體結構利用18路舵機驅動產品運動,模仿蝎子的運動步態,同時本產品還配有可拆卸夾鉗和尾巴,可以根據不同工作需求安裝不同的末端執行器,結構靈活性大,適用性廣泛。
(4) 利用GPS定位系統實時查看產品的位置,可以更加精確地掌握仿生機器人工作狀態,防止仿生機器人出現意外情況。
參考文獻:
[1] 張軍豪,陳英龍,楊雙喜,等.蛇形機器人:仿生機理、結構驅動和建模控制[J].機械工程學報,2022,58(7):75-92.
[2] 宮德健,章成,劉鵬,等.基于生物仿生的水下救援機器人功能結構研究[J].河南科技,2020,39(35):53-55.
[3] 郭文昕,秦偉偉,李銘昊,等.一種面向危險環境遠程操作的仿人隨動機器人[J].信息與控制,2021,50(2):174-183.
[4] 王穎,王碩.仿生機器人技術發展概況[J].高科技與產業化,2016(5):44-47.
[5] 崔新忠,常誠,繆新穎.仿生機器人的發展與應用研究[J].機器人技術與應用,2017(4):33-36.
[6] 朱萬浩,章盼梅,孔令棚,等.水下仿生機器人設計與實現[J].機床與液壓,2022,50(9):71-74.
[7] 李亞文,黃樂樂,張文奕.一種煤礦井下環境安全勘測仿生機器人的設計[J].微型電腦應用,2021,37(11):117-120.
【通聯編輯:代影】
