移動網絡環境下的船舶異構網絡定位算法
2022-10-19 10:43:22李靜
艦船科學技術 2022年17期
關鍵詞:船舶
李靜
(1.河南大學 濮陽工學院,河南 濮陽 457000;2.濮陽職業技術學院,河南 濮陽 457000)
0 引 言
近年來移動通信網絡發展速度明顯提升,多類型無線接入技術層出不窮,根據相關調查資料顯示,已有的無線接入技術的類型分為局域網、城域網、廣域網等。目前中國與各國的貿易往來頻率逐漸增大,船舶之間通信質量需求越發顯著,單一的網絡對目前船舶應用而言,存在供不應求的問題。異構網絡的出現,可保證移動網絡環境下船舶通信的間斷概率明顯變小。多種無線接入網絡融合應用即為異構網絡,此類網絡應用下,就算某種接入技術發生異常問題不能正常傳輸信息,其他接入網絡便提供信息服務,保證網絡服務的無縫銜接。
無線定位技術屬于移動無線網絡的核心技術,和同構網絡對比可知,異構網絡的信標節點數目較多,對定位觀測量信息的檢測范圍更廣,定位精度更高。為此,目前船舶通信網絡也主要采用異構網絡通信技術,用于船舶的無線定位任務中。無線定位主要通過異構網絡未知節點定位技術完成,目前,針對異構網絡定位問題的研究已有很多,錢開國等使用信標節點與未知節點之間的距離,實現網絡定位,但信標節點數量對定位精度存在一定影響,具體影響需深入分析,以此設置合理的信標節點;李鵬等使用雞群算法求解定位無線傳感器網絡未知節點坐標,該算法在實驗中被驗證具有較好的定位能力,但是定位區域尺寸對其定位精度存在一定影響。
在已知研究成果基礎上,本文提出移動網絡環境下的船舶異構網絡定位算法。該算法考慮定位區域尺寸對網絡定位結果的影響、基站位置存在的固定性,在鎖定未知節點位置區域基礎上,通過估計基站與未知節點距離的方式,定位未知節點坐標,并引入改進遺傳算法,校正定位誤差,提高定位精度。
1 船舶異構網絡定位
1.1 基于Bounding Box 算法的異構網絡未知節點位置區域鎖定方法


其中:x,x是第個節點橫坐標的最小值與最大值;y,是第個節點縱坐標的最小值與最大值。
若把船舶異構網絡通信范圍看成內接矩形的Bounding Box,便鎖定異構網絡未知節點位置區域,詳情見圖1。

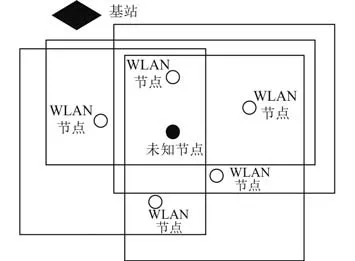
圖1 異構網絡未知節點位置區域鎖定Fig.1 Unknown node location area locking in heterogeneous network

式中,是整數。
如果的數值是2,那么未知節點處于信標節點,,的交集 區域中。
1.2 基于改進遺傳算法的船舶異構網絡定位方法
1.2.1 基于TOA 測距的基站與未知節點距離測量


式中,為信號傳輸速度。
此測距方式下,如果未知節點的晶體振蕩器輸出信號執行倍頻處理后,其脈沖頻率為,那么它的脈沖周期為:

如果信號傳播的時鐘周期是,那么未知節點信號傳輸時間為:

式(5)是基于理想狀態中計算的信號傳輸時間,但現實晶體振蕩器對溫度的敏感性較高,輸出的脈沖存在頻率偏移問題,則實際的脈沖頻率是=+Δ,Δ表示屬于頻率偏移隨機量。實際脈沖周期為:

如果未知節點信號傳輸至基站時,實際抵達時間是,那么信號傳輸速度為:

現實應用時,設置基站獲取未知節點傳輸的無線信號時,脈沖頻率是,屬于標準值,那么未知節點信號傳輸時間實測值為:

綜上所述,結合基站與未知節點的距離,使用基站坐標與距離相減,便可估計未知節點的所在位置 θ。
1.2.2 改進遺傳算法的異構網絡定位誤差校正方法
結合測量的未知節點位置θ,考慮到異構網絡無線設備晶體振蕩器的頻率漂移會導致未知節點信號傳輸時間和實測信號傳輸時間并不一致,此時未知節點定位結果θ存在偏差。為此,多次測量θ之后,使用基于改進遺傳算法的異構網絡定位方法,將多次測量的基站與未知節點距離值設成遺傳算法的初始群體,通過改進遺傳算法,校正測量誤差,實現未知節點的高精度定位。定位流程如圖2 所示。

圖2 基于改進遺傳算法的異構網絡定位方法Fig.2 Heterogeneous network location method based on improved genetic algorithm
1)運算未知節點坐標群體θ的適應度值,結合適應度值將未知節點坐標群體執行輪盤賭處理,構建未知節點坐標的父代群體,輪盤賭處理方法屬于遺傳算法常用選擇方法,操作較為簡單,可結合未知節點坐標群體θ中,某個未知節點坐標被選擇的概率和適應度存在關聯這一標準,選擇代表最優未知節點坐標的個體,被選擇概率主要通過適應度判斷,適應度較高,則被選擇概率較大。
為了提取可用于構建父代群體的個體,必須執行多輪選擇,選擇時,構建一個取值區間是0~1 的隨機數,把此隨機數設成篩選依據。
2)使用式(9)執行交叉處理,將未知節點父代群體以交叉的方式,構建新的個體(,):

式中:是時刻;,依次是未知節點所在位置的橫坐標與縱坐標;δ是親近系數,取值區間是0~1,可用于判斷交叉后子代和父代個體之間親近度;X,Y依次是+1時刻未知節點坐標個體的坐標。
3)將交叉處理后未知節點坐標群體,通過非一致性變異算子執行變異處理,便可獲取子代群體。
4)運算子代群體里全部個體適應度,提取最大適應度所屬的異構網絡未知節點坐標個體,此個體位置就是最終定位結果。
5)運算定位誤差,分析改進遺傳算法收斂條件:如果迭代次數為最大值,便可結束收斂,輸出定位結果,反之回到步驟1)再次定位。
2 實驗結果與分析
為分析本文算法的應用效果,設置船舶異構網絡模式是單基站WCDMA+WLAN 網絡。此類異構網絡應用下,單基站WCDMA 網絡、WLAN 網絡的覆蓋半徑依次設成1 000 m,400 m。基站坐標是(700 m,300 m),將其設成,未知節點坐標設成(80 m,60 m),將其設成。目前WLAN 網絡存在的信標節點數目是4 個,4 個信標節點均可以和未知節點通信,信標節點的位置依次是1(20 m,30 m),2(110 m,70 m),3(30 m,90 m),4(80 m,25 m)。
本文算法首先使用基于Bounding Box 算法的異構網絡未知節點位置區域鎖定方法,提取未知節點位置所在區域,結果如圖3 所示。圖中,異構網絡未知節點位置區域的4 個頂點坐標依次是(30 m,10 m),(30 m,90 m),(85 m,10 m),(85 m,90 m),邊長1、邊長2 依次是80 m,55 m。

圖3 異構網絡未知節點位置區域鎖定結果Fig.3 Area locking result of unknown node location in heterogeneous network
本文算法對船舶異構網絡未知節點定位時,迭代次數與定位精度、定位耗時存在直接聯系,定位精度、定位效率影響船舶的定位應用效果,定位效率還對網絡節點的使用壽命存在影響,因為網絡定位要求算法在應用時需要保證消耗較少的能量,才可保證網絡節點壽命不受損,如果定位耗時較多,消耗能量較多,便會導致節點壽命受損。為此,需要設置合理的迭代次數,以此保證定位精度與定位效率滿足需求,從而實現異構網絡定位的合理操作。則迭代次數與定位精度、定位效率的關系如圖4 和圖5 所示。由圖可知,迭代次數是4 時,本文算法對船舶異構網絡未知節點定位時,定位精度最高,超過0.95,定位耗時最少,僅有0.2 s。為此,在后續應用時,設置迭代次數為4。

圖4 迭代次數與定位精度的關系Fig.4 Relationship between iteration times and positioning accuracy
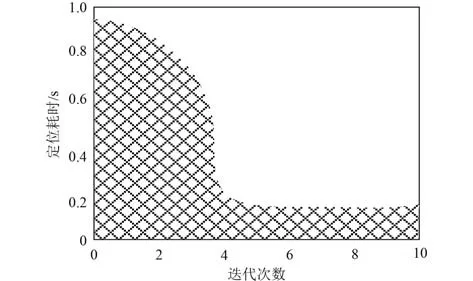
圖5 迭代次數與定位效率的關系Fig.5 Relationship between iteration times and positioning efficiency
基于迭代次數為4 的條件下,本文算法對船舶異構網絡未知節點定位結果示意圖如圖6 所示。可知,本文算法對船舶異構網絡未知節點定位結果與圖3 相符,代表定位結果正確。
圖7 為對一個未知節點的定位效果,而異構網絡環境下,還會存在多個未知節點需定位的情況,則本文算法應用下,多個未知節點定位效果同圖6 一致,本文算法對多個未知節點的定位結果均與實際位置相符,說明本文算法在移動網絡環境下,對船舶異構網絡的定位精度可滿足應用需求,解決船舶異構網絡的定位問題。

圖6 船舶異構網絡未知節點定位結果Fig.6 Location results of unknown nodes in ship heterogeneous network

圖7 多個未知節點定位效果Fig.7 Effect of locating multiple unknown nodes
3 結 語
移動網絡環境下的船舶異構網絡定位問題,是船舶無線定位應用的核心問題。本文研究了一種移動網絡環境下的船舶異構網絡定位算法,并通過實驗驗證該算法的應用效果,實驗驗證結論顯示:
1)迭代次數是4 時,本文算法對船舶異構網絡未知節點定位時,定位精度最高,定位耗時最少,所以為了保證本文算法對異構網絡定位效果,將迭代次數設成4。
2)本文算法對單個未知節點、多個未知節點的定位結果符合實際坐標信息,證實其定位結果可信。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30