關于果蔬采摘機器人機械系統設計與關鍵技術的研究*
2022-10-20 14:59:16王甦
南方農機 2022年20期
關鍵詞:設計
王 甦
(河池市職業教育中心,廣西 河池 547000)
隨著社會的快速發展,人工采摘作為農業生產中需要人力最多的一環,成本越來越高,許多國家為了促進采摘業的發展,均在努力研發采摘機器人。通過機器代替人工,既節約成本又提高效率[1]。果蔬采摘機器人是一種采摘設備,其主要的功能是對果蔬進行精準采摘,其工作原理是通過PLC控制系統,在系統中編寫特定的驅動程序;同時,機械手采摘機構應在液壓機的作用下工作,位置檢測裝置的實時監控應返回控制系統,以便相應地調整機構的位置,保證位置的準確性,使得采摘機構能夠按照設定完成動作,滿足果蔬采摘的工作要求。
1 果蔬采摘機器人結構及控制系統的設計
1.1 設計技術要求
主要用途:對果蔬進行采摘及搬運[2];主要參數:三自由度;手臂可以旋轉180°,速度小于或等于70 mm/s;定位方式:根據地形設置起止位置;定位精度:±0.3 mm;驅動方式:液壓驅動與電機驅動結合;控制方式:PLC;手指握力:500 N;夾持范圍:8 dm3,10 kg,車體部分為直流電機驅動,荷載100 kg。
1.2 果蔬采摘機器人機械手的運動分析
根據果蔬采摘機器人的設計要求,其主要是在PLC的控制下,在編寫程序后,行駛到指定位置,采摘果蔬并運到指定位置。其主要動作順序為:液壓缸處于收縮狀態,手臂處于后限位,小車行駛,識別到成熟果蔬,行駛到指定位置,機械手開始作業:手爪張開—手臂前伸下降—手臂中止—檢測位置—手臂下降—手爪閉合—手臂上升—手臂旋轉180°—手臂下降—手臂下降到指定位置—手爪張開—手臂上升—手臂回轉180°至原始位置[3-4]。
2 手部設計及計算校核
2.1 機械手部設計要求
1)具有一定的夾緊力與驅動力,并且保證具有足夠的夾緊力以便夾斷瓜藤。
2)夾具應有一定的夾緊間隔和開閉角度,從而抓取果蔬。
3)手爪應具有一定的定位方式,從而實現對果蔬的精準抓取。
2.2 手部設計方案
根據設計參數及其工作用途,其要實現果蔬的抓取及瓜藤的切斷,并將果蔬放入小車當中,所以果蔬采摘機器人是用來抓取果蔬及切割瓜藤的夾持裝置。綜上考慮,將抓取部件設計為鏟斗形式,通過螺紋桿的轉動,使得移動平臺移動,進而實現機械手的收縮,完成采摘動作。手爪結構如圖1所示。

圖1 手爪結構示意圖
分析表明,在電機動力不變的情況下,隨著角度的增大,握力增大,因此牽引桿的拉伸增大,手部的設計尺寸應增大,所以α=30°~45°最好。
3 手臂設計及計算校核
3.1 機械手手臂的設計要求
1)臂部因需要承載果蔬及爪部重量,應保證其剛度及強度、承載能力并且控制重量[5]。
2)手臂運動速度要平穩,盡量降低慣性沖擊。
3)減少手臂部件的摩擦,手臂結構盡量簡單緊湊。
3.2 手臂設計方案
本設計的機械手臂,在液壓缸的收縮下能夠實現彎曲運動,而回轉動作則是由機身上的回轉臺在電機的帶動下實現的。采取雙液壓缸的形式對手臂進行推拉從而實現手爪位置的精準控制[5-6]。在最末端裝入電機連接螺紋桿,通過電機的正反轉來實現手部的收縮與張開,進而實現對果蔬的摘取與放下。其結構如圖2所示。

圖2 機械臂結構
4 車身設計及計算校核
4.1 車身的設計要求
1)需安裝一個果蔬機械臂回轉機構并保證其精度及剛度。
2)為采摘機構提供一個穩定的工作平臺。
3)能夠穩定轉向。
4.2 機身的設計方案
本文選用直流電機作為整個裝置的動力源,因此直流電機性能直接決定整個裝置的運行情況。選用電機不僅要考慮價格合理,降低整個裝置成本,也要能夠提高足夠的動力,保證整個裝置穩定運行,還不能選用動力遠大于所需的電機,這樣會造成性能過剩,而且價格昂貴,不符合設計理念。因此選擇電機時,不能考慮單一指標,不僅要考慮多種因素,也要考慮工作環境。計算直流電機功率:

考慮本裝置的整體結構,本裝置需要承受的質量為100 kg,需要載荷為1 000 N,其運行速度V=0.5 m/s,因此:

該機構的傳動效率是0.85,則:

本裝置連接軸轉動,軸的直徑為20 mm,則轉速為:

根據上述計算和論述,考慮到工作環境和實際需求,考慮設計余量,本裝置選取功率為1.5 kW電機,其轉速為2 980 r/min,型號為Y80M1-2[7-9]。如圖3所示。
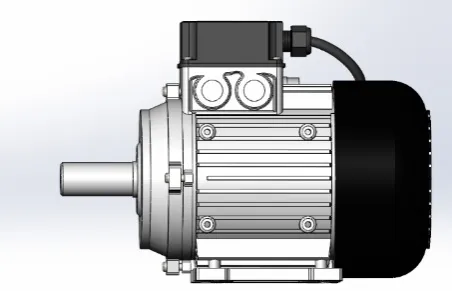
圖3 電機結構示意圖
5 機械手液壓系統
5.1 機械手液壓系統原理圖設計
根據果蔬采摘機器人的設計要求,本機械手具有三個自由度,具有液壓驅動和PLC控制,能夠實現對果蔬的精確采摘功能[10]。
5.2 液壓元件明細表及模型展示
液壓元件明細、液壓缸模型分別如表1、圖4所示。
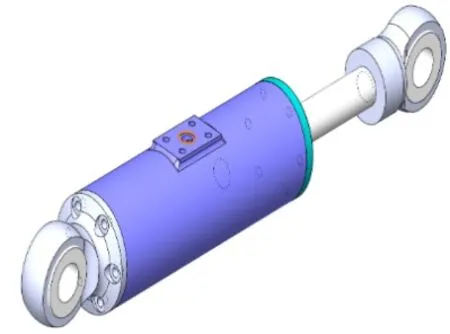
圖4 液壓缸模型圖
6 總結
課題組通過對國內外果蔬采摘機器人的了解,對相關技術領域的學習,發現自己的設
計還有很多不足。具體的不足如下:1)結構設計還不夠成熟,由于果蔬的果實與葉片顏色近似,導致果蔬采摘機器人的成功采摘率不高;結構設計還不夠緊湊,機器人價格過高,要想投入生產還需進一步優化;2)PLC設計程序設計可能過于理想,還有許多情況沒有考慮到,程序設計也需要進一步完善;3)在設計過程中,為了追求各個部件的動力充足,在一些方面忽略了環保理念。希望隨著科技的發展,可以制造出識別精確、采摘平穩、動力環保、價格低廉的果蔬采摘機器人,早日幫助果蔬種植戶們解決人工采摘成本高、效率低這一難題。

表1 液壓元件明細表
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04