肩關(guān)節(jié)全驅(qū)動上肢康復(fù)機器人的設(shè)計與分析
2022-10-21 07:17:36王占禮段志峰高墨堯龐在祥
機械傳動 2022年10期
關(guān)鍵詞:康復(fù)
王占禮 段志峰 李 爽 高墨堯 龐在祥
(長春工業(yè)大學(xué) 機電工程學(xué)院, 吉林 長春 130012)
0 引言
隨著人口老齡化的加劇、生活節(jié)奏的加快以及不良飲食習(xí)慣的影響,因腦卒中造成肢體運動障礙的人口迅速增長。腦卒中作為發(fā)病率高、復(fù)發(fā)率高、致殘率高、死亡率高的腦血管疾病,正以每年300多萬人的速度增長;患病的存活者中,約80%會留有不同程度的肢體功能障礙[1-5]。醫(yī)學(xué)和臨床實踐表明,治療腦卒中最有效的方法就是治療后轉(zhuǎn)為反復(fù)的康復(fù)訓(xùn)練。傳統(tǒng)的康復(fù)治療一般是通過治療師與患者面對面、長時間的接觸來幫助患者進行肢體上的反復(fù)運動,從而達到康復(fù)治療的效果。這種治療往往過于依賴治療師的自身治療經(jīng)驗,并且現(xiàn)階段治療師數(shù)量與患者的數(shù)量相差較大,存在康復(fù)治療效率低、成本高、操作難度大且不易隨時進行的缺點。上肢康復(fù)機器人的出現(xiàn)彌補了以上缺點,將機器人技術(shù)與康復(fù)醫(yī)學(xué)相結(jié)合,可使治療效果事半功倍。
隨著康復(fù)醫(yī)療技術(shù)與人工智能技術(shù)的不斷發(fā)展,針對上肢運動功能障礙治療的康復(fù)機器人正成為研究的重點,國內(nèi)外眾多學(xué)者及相關(guān)單位都對其進行了大量的研究,并取得了一些成果。國外研發(fā)的具有代表性的產(chǎn)品有:Lünenburger L 等[6]開發(fā)的基于跑步機的外骨骼式康復(fù)機器人Lokomat,由Colomer C等[7]研制的可提供手臂減重系統(tǒng)、增強表現(xiàn)反饋和評估工具的Armeo 機器人,Nef T 等[8]開發(fā)的具有6 自由度半骨架結(jié)構(gòu)的ARMin 機器人等。國內(nèi)研發(fā)的具有代表性的產(chǎn)品有:Huang X 等[9]研發(fā)的10 自由度上肢外骨骼康復(fù)機器人,李慶玲等[10]研發(fā)的5自由度康復(fù)機械臂系統(tǒng),以及與肩關(guān)節(jié)轉(zhuǎn)動中心相匹配的新型上肢康復(fù)機器人等[11-13]。
目前,對上肢康復(fù)機器人的研究逐漸向外骨骼式康復(fù)機器人方向發(fā)展,通過機器人運動帶動患者上肢運動來達到康復(fù)訓(xùn)練的目的。其中,大部分的外骨骼式康復(fù)訓(xùn)練機器人運動形式單一、結(jié)構(gòu)質(zhì)量大,康復(fù)運動存在局限性,康復(fù)周期長,很難對患者進行有效的康復(fù)訓(xùn)練。因此,本文中在深入了解上肢康復(fù)機理的前提下,基于人體解剖學(xué)與人機工程學(xué)理論,設(shè)計了一種5自由度肩關(guān)節(jié)全驅(qū)動上肢外骨骼康復(fù)機器人,可實現(xiàn)肩關(guān)節(jié)的內(nèi)收/外展、前屈/后伸、旋內(nèi)/旋外運動,肘關(guān)節(jié)的屈伸運動及腕關(guān)節(jié)的橈屈/尺屈運動。建立了該上肢康復(fù)機器人的運動學(xué)和動力學(xué)模型,推導(dǎo)了其運動學(xué)和動力學(xué)方程,應(yīng)用Adams 對該上肢康復(fù)機器人進行仿真分析,分析了其工作空間,為進一步的研究提供理論依據(jù)。
1 上肢康復(fù)機器人結(jié)構(gòu)設(shè)計
從人體解剖學(xué)的角度看,人體上肢主要包括肩、肘、腕3個關(guān)節(jié)。肩關(guān)節(jié)作為人體關(guān)節(jié)中活動范圍最大的關(guān)節(jié),可作為3軸進行運動,主要的運動功能由盂肱關(guān)節(jié)實現(xiàn),其由肱骨頭和肩胛骨關(guān)節(jié)盂構(gòu)成,屬于球窩關(guān)節(jié),支撐整個肩部,維持人體重心。肩關(guān)節(jié)構(gòu)型如圖1所示。
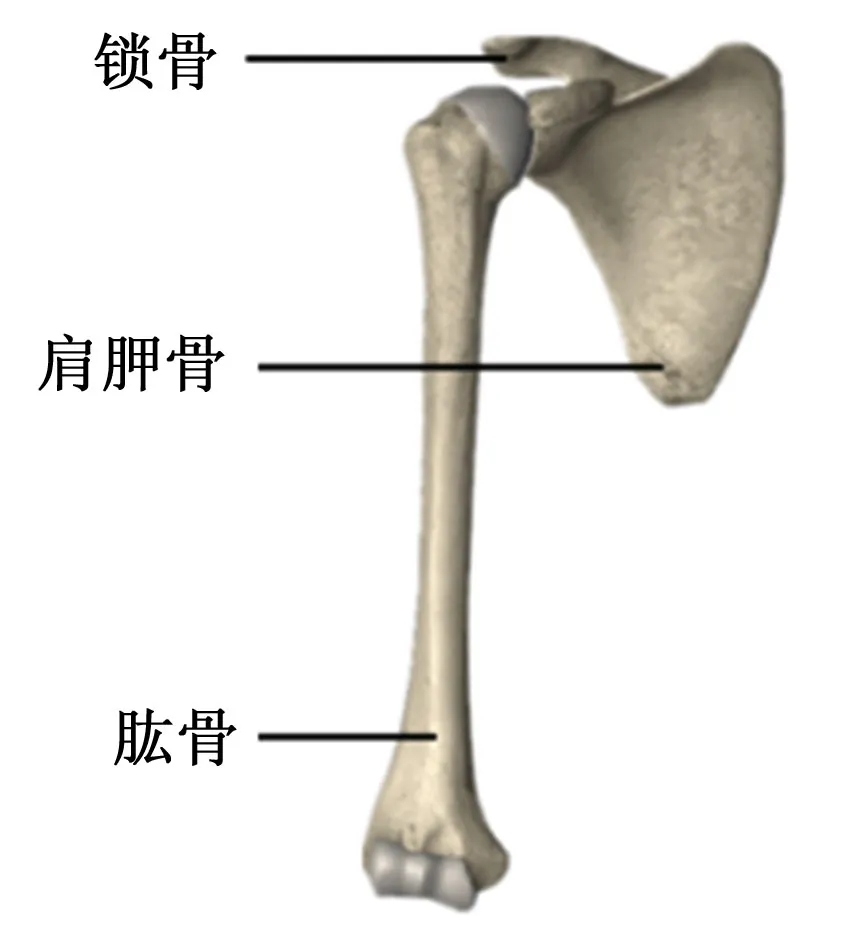
圖1 肩關(guān)節(jié)構(gòu)型Fig.1 Shoulder joint configuration
本文中所設(shè)計的5自由度上肢康復(fù)機器人整體結(jié)構(gòu)如圖2所示。其中,肩關(guān)節(jié)的3個自由度均為被動自由度,每個主動關(guān)節(jié)對應(yīng)1個驅(qū)動模塊的全驅(qū)動方式,通過外骨骼機器人帶動患者肢體進行運動。相比欠驅(qū)動方式,全驅(qū)動機器人的優(yōu)勢在于可以提供單關(guān)節(jié)的康復(fù)訓(xùn)練、工作空間與人體運動空間更接近。肘關(guān)節(jié)和腕關(guān)節(jié)分別有1個自由度,均為主動自由度,患者可自行運動并帶動外骨骼機器人進行運動。
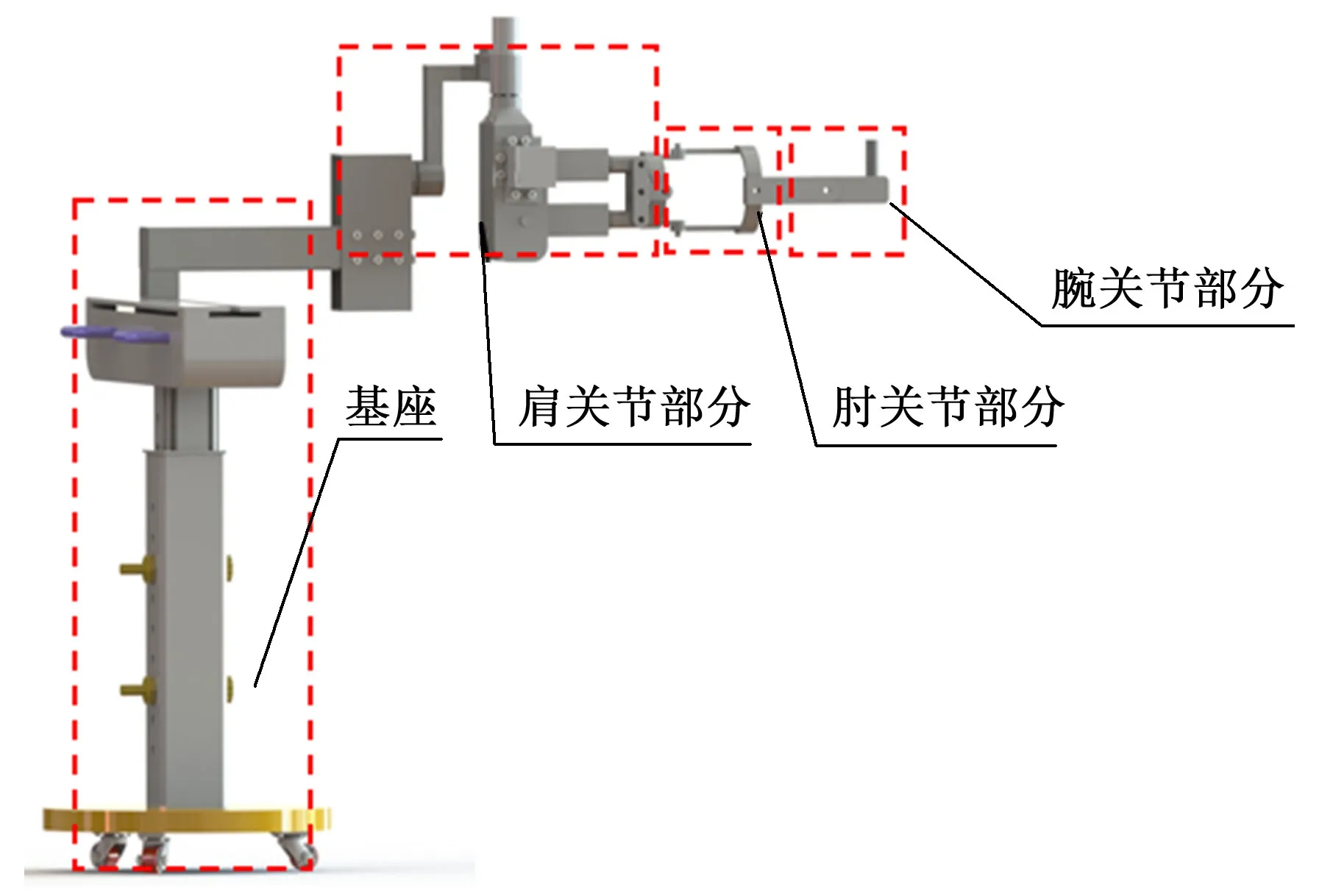
圖2 上肢康復(fù)機器人整體結(jié)構(gòu)示意圖Fig.2 Schematic diagram of the overall structure of the upper limb rehabilitation robot
以人體右臂為例,建立人體上肢各關(guān)節(jié)運動自由度的模型如圖3 所示。對應(yīng)人體上肢自由度分別是:肩關(guān)節(jié)的內(nèi)收/外展(J1)、旋內(nèi)/旋外(J2)、前屈后伸(J3);肘關(guān)節(jié)的屈曲/伸展(J4);腕關(guān)節(jié)的橈屈/尺屈(J5)。
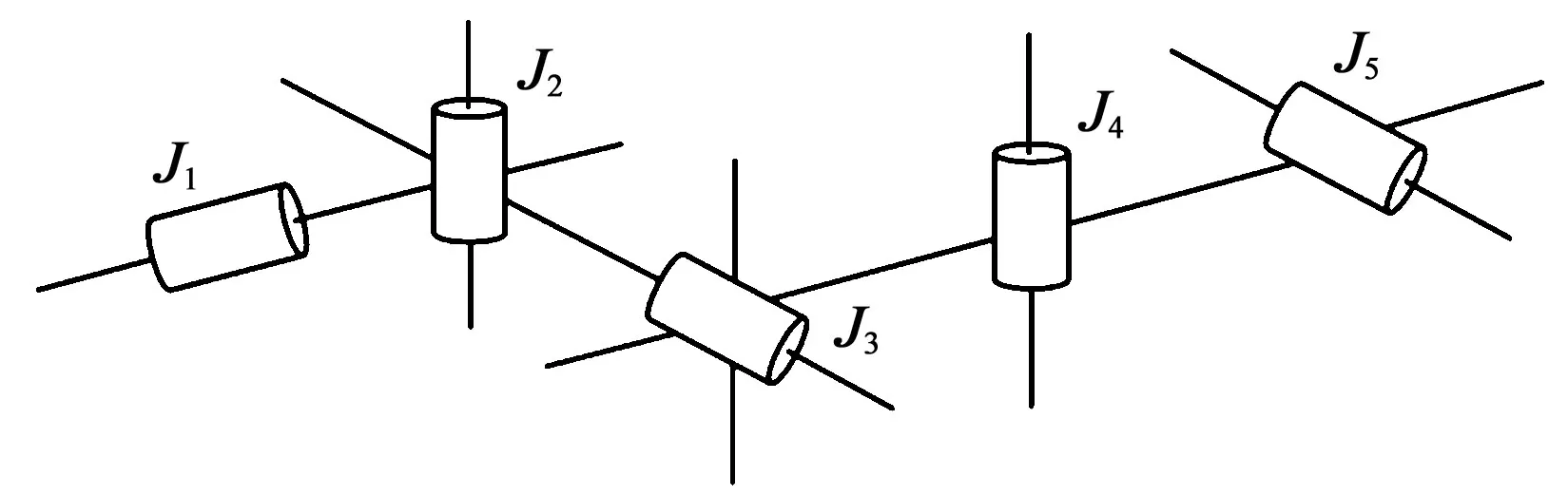
圖3 機器人自由度簡圖Fig.3 Schematic diagram of degrees of freedom of robots
人體上肢各項尺寸與關(guān)節(jié)參數(shù)依據(jù)GB 10000—88《中國成年人人體尺寸標(biāo)準(zhǔn)》[14]1-14來設(shè)計,人體上肢關(guān)節(jié)運動范圍及機器人運動范圍如表1所示。
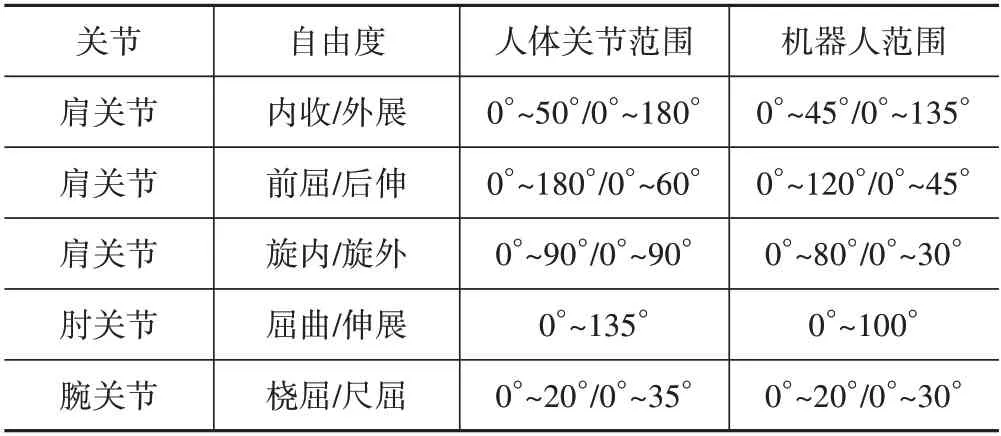
表1 人體上肢關(guān)節(jié)運動范圍及機器人運動范圍Tab.1 Range of motion of the upper limb joint of the human body and the range of motion of the robot
上肢康復(fù)機器人肩關(guān)節(jié)結(jié)構(gòu)如圖4所示。肩關(guān)節(jié)的3個自由度分別為前屈/后伸、內(nèi)收/外展、旋內(nèi)/旋外,3個自由度回轉(zhuǎn)中心交于肩關(guān)節(jié)一點,與人體上肢肩關(guān)節(jié)結(jié)構(gòu)相匹配,可以完成X軸、Y軸、Z軸3個方向的轉(zhuǎn)動。
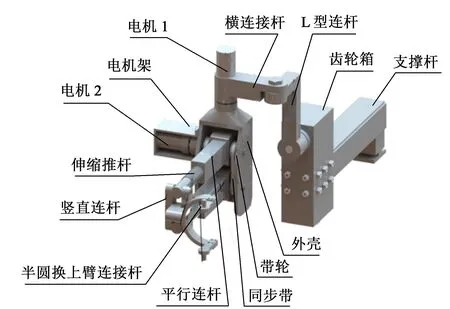
圖4 肩關(guān)節(jié)結(jié)構(gòu)示意圖Fig.4 Schematic diagram of shoulder joint structure
肩關(guān)節(jié)前屈/后伸自由度采用平行連桿結(jié)構(gòu),平行連桿末端連接伸縮推桿。其中,伸縮推桿上端與連桿固定相連,伸縮推桿下端與連桿套接,可以相對滑動,既能保證上臂結(jié)構(gòu)的強度,又減小作用力,通過電機驅(qū)動同步帶輪實現(xiàn)平行連桿在矢狀面上的運動,如圖5所示。
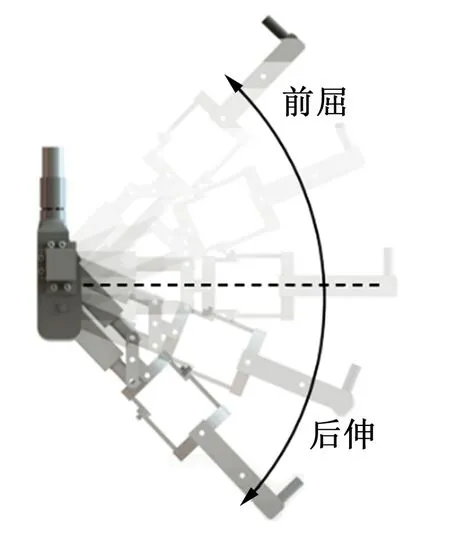
圖5 肩關(guān)節(jié)前屈/后伸結(jié)構(gòu)示意圖Fig.5 Schematic diagram of shoulder joint flexion/extension structure
肩關(guān)節(jié)內(nèi)收/外展自由度如圖6 所示。傳統(tǒng)的康復(fù)機器人在進行肩關(guān)節(jié)內(nèi)收/外展運動時,需要配合運動才可完成;而該設(shè)計可以提供單關(guān)節(jié)的康復(fù)訓(xùn)練,通過電機驅(qū)動錐齒輪傳動可直接完成該自由度的運動。齒輪箱固定在后部支撐桿,大大減輕了整體機械結(jié)構(gòu)的質(zhì)量。肩關(guān)節(jié)旋內(nèi)/旋外運動如圖7 所示。機器人整體結(jié)構(gòu)更為簡便,減小了裝置與人體之間的干涉,提高了空間利用率,使整體結(jié)構(gòu)更為緊湊。
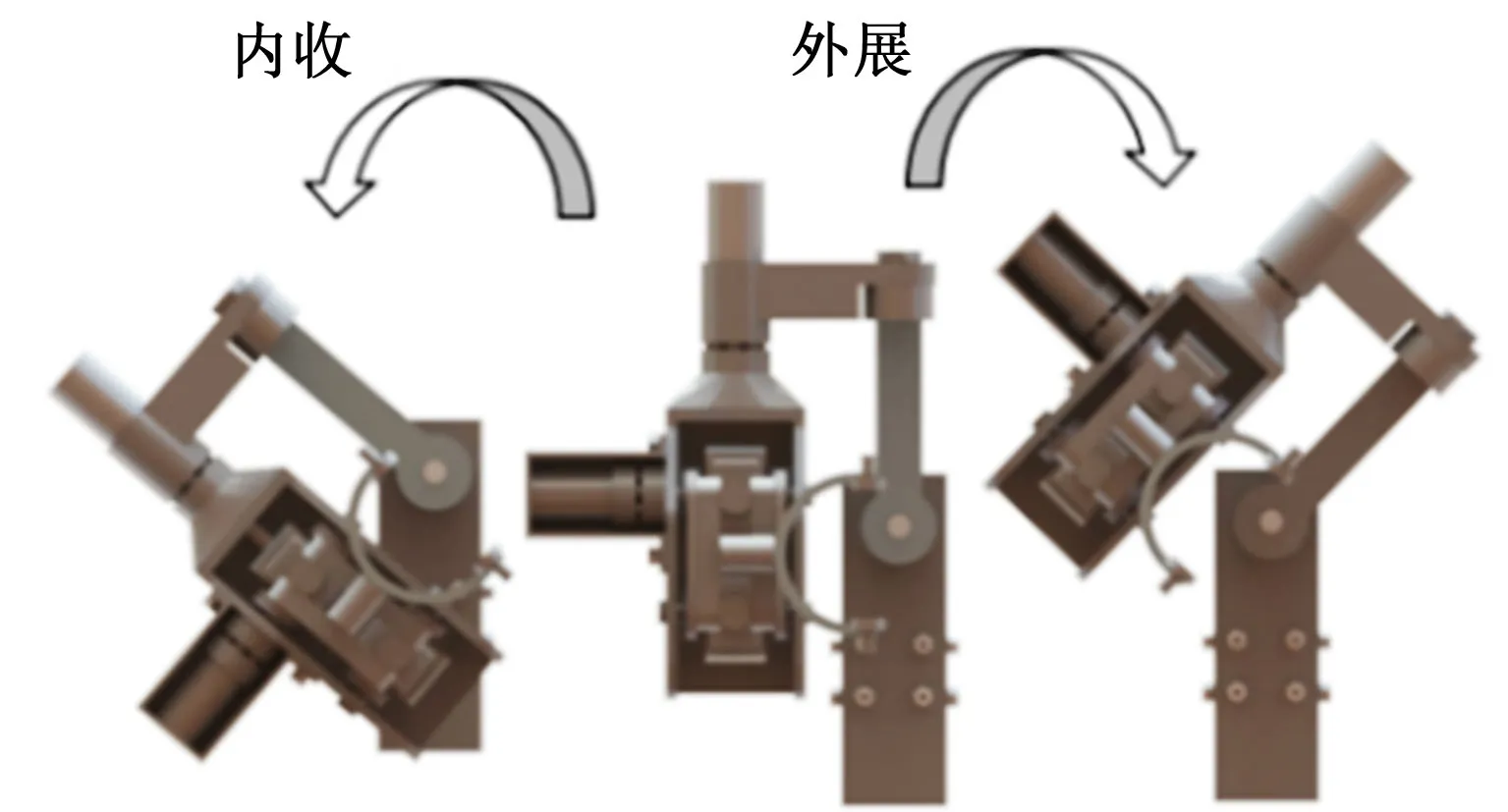
圖6 肩關(guān)節(jié)內(nèi)收/外展結(jié)構(gòu)示意圖Fig.6 Schematic diagram of shoulder joint adduction/abduction structure

圖7 肩關(guān)節(jié)旋內(nèi)/旋外結(jié)構(gòu)示意圖Fig.7 Schematic diagram of shoulder joint internal rotation/external rotation structure
整個上肢康復(fù)系統(tǒng)由康復(fù)機器人和基座兩部分組成。患者在康復(fù)過程中,手臂與機器人末端接觸,上肢通過機器人驅(qū)動牽引機構(gòu)完成肩關(guān)節(jié)的主被動康復(fù)訓(xùn)練和肘、腕關(guān)節(jié)的主動康復(fù)訓(xùn)練。基座可根據(jù)不同人體的高度進行調(diào)整,以適應(yīng)患者體型的差異及不同的康復(fù)治療環(huán)境。
2 運動學(xué)分析
2.1 正運動學(xué)分析
為得到上肢康復(fù)機器人相鄰桿件之間的平移旋轉(zhuǎn)關(guān)系以及末端位姿,本文中采用D-H 坐標(biāo)系法建立上肢康復(fù)機器人的D-H 參數(shù)模型,如圖8 所示。其中,D-H模型參數(shù)如表2所示。
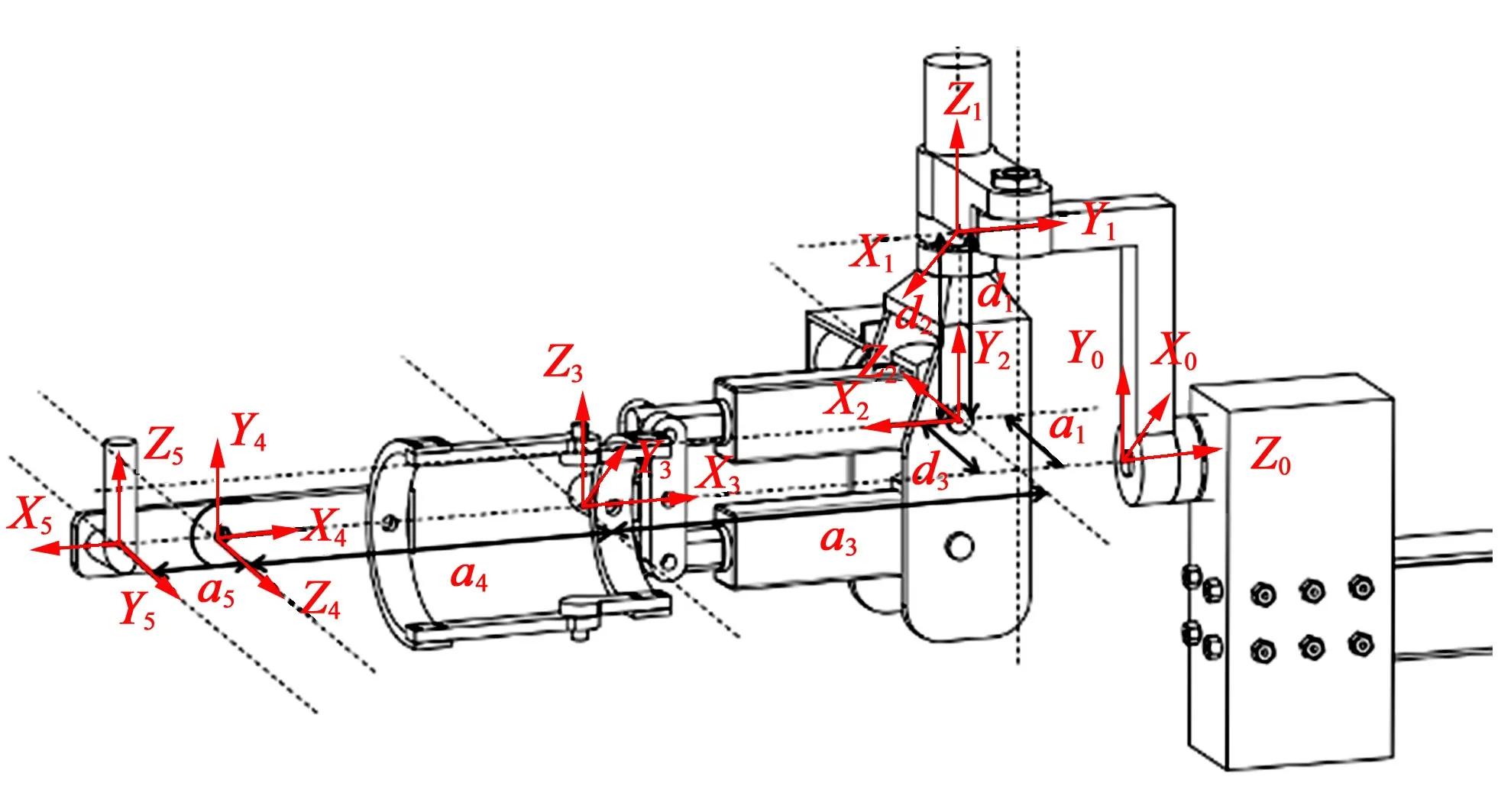
圖8 上肢康復(fù)機器人D-H參數(shù)模型Fig.8 D-H parameter model of upper limb rehabilitation robots
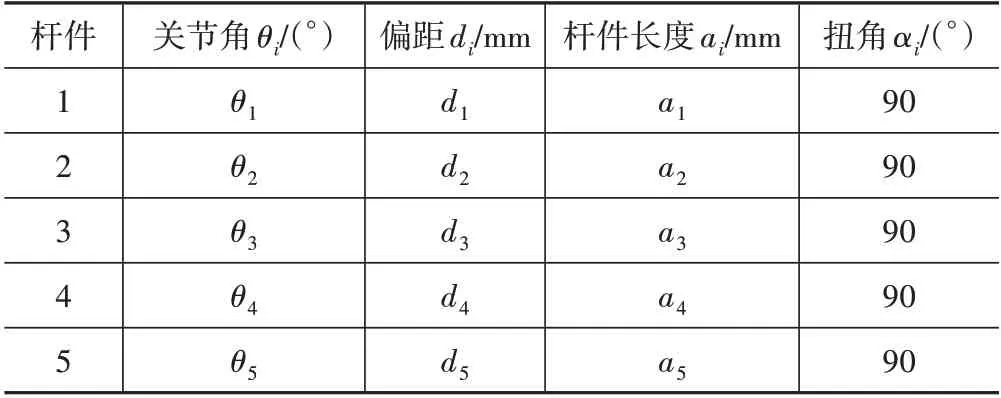
表2 上肢康復(fù)機器人D-H參數(shù)表Tab.2 D-H parameter table of upper limb rehabilitation robots
利用坐標(biāo)系變換,實現(xiàn)坐標(biāo)系{Oi-1}到坐標(biāo)系{Oi}之間的坐標(biāo)變換。相鄰坐標(biāo)系{Oi}和{Oi-1}間的坐標(biāo)變換為

式中,cθi= cosθi;sθi= sinθi;cαi= cosαi;sαi=sinαi;i-1Ti=Ai= Rot(Z,θi)× Trans(0,0,di)。
末端手握把處坐標(biāo)系相對于基座坐標(biāo)系的位姿矩陣可以表示為
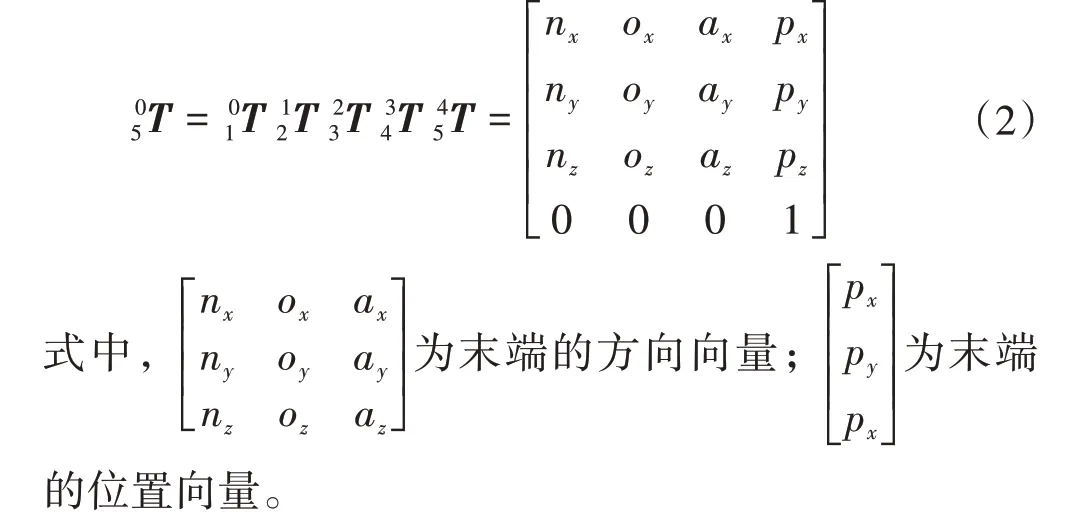
將上肢康復(fù)機器人的初始參數(shù)代入式(2),得機器人末端初始位姿與機器人三維模型的初始位置一致,由此驗證了上肢康復(fù)機器人正運動學(xué)求解的正確性。
2.2 逆運動學(xué)分析
機器人的逆運動學(xué)是機器人運動學(xué)的一個重要組成部分,是進行機器人軌跡規(guī)劃的前提和基礎(chǔ),通過已知機器人末端位姿,求解各個關(guān)節(jié)變量。在眾多的逆運動學(xué)求解方法中,本文中采用代數(shù)法進行求解。
機器人末端齊次變換矩陣為
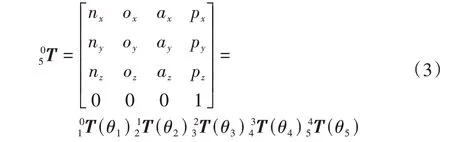
由于簡化了機器人運動模型,對基座的運動學(xué)不做分析。設(shè)θ1為已知量,通過逆解上述矩陣,分別得到關(guān)節(jié)角θ為
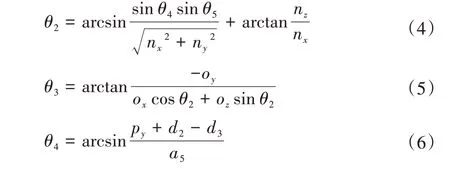

將上肢康復(fù)機器人的末端變量相應(yīng)位置的點代入式(3)中,得到相應(yīng)各關(guān)節(jié)的理論旋轉(zhuǎn)角度,這與三維模型中各關(guān)節(jié)轉(zhuǎn)角一致,由此驗證了上肢康復(fù)機器人逆運動學(xué)求解的正確性。
3 動力學(xué)分析
為了驗證上肢外骨骼康復(fù)機器人的力學(xué)性能是否能夠滿足關(guān)節(jié)訓(xùn)練的要求,對上肢康復(fù)機器人進行動力學(xué)分析計算。本文中采用拉格朗日方程法,計算出自變量為笛卡爾坐標(biāo)的廣義動力學(xué)2階微分方程。對上肢康復(fù)機器人進行簡化分析,可將其簡化為如圖9 所示的機構(gòu)。其中,L1、L2、L3分別為上臂、前臂和小臂。

圖9 上肢康復(fù)機器人動力學(xué)模型Fig.9 Dynamic model of upper limb rehabilitation robots
圖9 中,設(shè)連桿1、連桿2 和連桿3 的關(guān)節(jié)變量轉(zhuǎn)角分別為θ1、θ2和θ3,對應(yīng)關(guān)節(jié)1、關(guān)節(jié)2和關(guān)節(jié)3的力矩分別為τ1、τ2和τ3,3 個桿的質(zhì)量分別為m1、m2和m3,3個桿的質(zhì)心分別為p1、p2和p3,質(zhì)心距離關(guān)節(jié)轉(zhuǎn)動中心的距離分別為d1、d2和d3。
上肢康復(fù)機器人的拉格朗日方程的標(biāo)準(zhǔn)形式為

式中,τi為各關(guān)節(jié)的關(guān)節(jié)力矩;q?i為角速度或線速度;n為連桿數(shù)量。
拉格朗日方程中,動勢算子L為

式中,K為動能函數(shù);P為勢能函數(shù)。
4 運動學(xué)與動力學(xué)仿真分析
4.1 人體關(guān)節(jié)力矩分析
人體上肢質(zhì)心分布如圖10 所示,對人體解剖學(xué)數(shù)據(jù)的研究[15]。圖10 中,上臂質(zhì)心c1與上臂近端距離L1約為上臂長度Lu的43.6%,前臂質(zhì)心c2與前臂近端距離L2約為前臂長度Lf的43%,手臂質(zhì)心c3與手部近端距離L3約為手長Ls的46.8%;根據(jù)國家標(biāo)準(zhǔn)GB 10000—88[14]1-4,取中國成年男性體質(zhì)量80 kg,手部長為202 mm,小臂長為268 mm,上臂長為349 mm。上肢關(guān)節(jié)所受重力產(chǎn)生的關(guān)節(jié)力矩Tg為
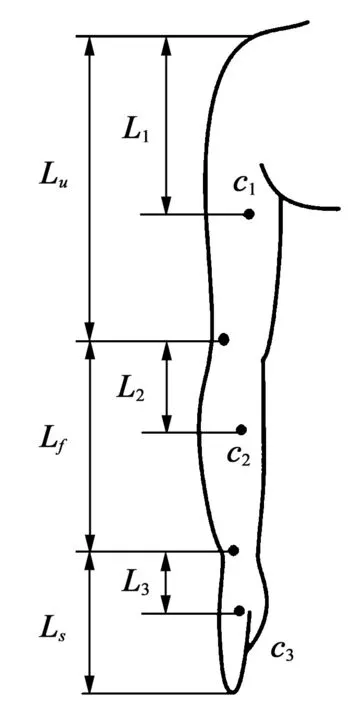
圖10 人體上肢質(zhì)心分布Fig.10 Distribution of the center of mass of the upper limbs of the human body
Tg=m1gL1+m2g(Lu+L2)+m3g(Lu+Lf+L3)= 14.31 N·m
由于人體上肢質(zhì)量分布不均勻,所以,給出的表達式為一個范圍而不是準(zhǔn)確值。
4.2 可行性和穩(wěn)定性驗證
為了驗證所設(shè)計的上肢康復(fù)機器人的可行性及所建模型在運動過程中的平穩(wěn)性,利用Adams 軟件建立機器人的虛擬樣機,根據(jù)運動學(xué)與動力學(xué)方程的計算結(jié)果,添加慣性參數(shù)、重力項參數(shù)以及由人體上肢重力產(chǎn)生的力矩,選取機器人各關(guān)節(jié)轉(zhuǎn)矩和末端質(zhì)心作為測量對象,整個運動時間設(shè)置為10 s。仿真得到各關(guān)節(jié)轉(zhuǎn)矩、末端質(zhì)心的位移、角速度、角加速度曲線如圖11所示。
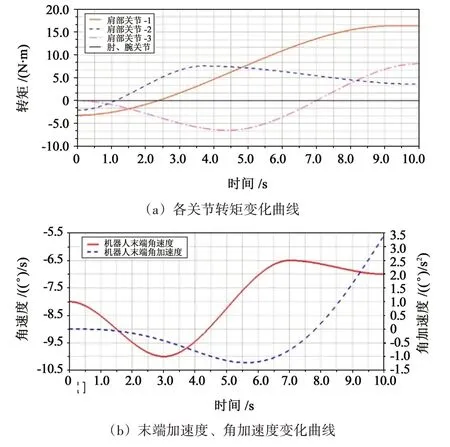
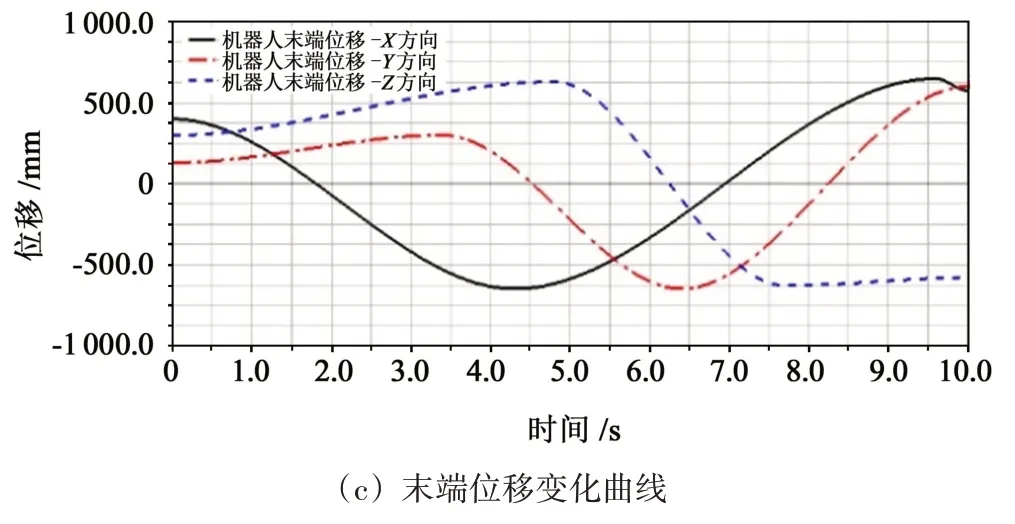
圖11 上肢康復(fù)機器人Adams仿真曲線Fig.11 Adams simulation curve of upper limb rehabilitation robots
圖11(a)所示為各關(guān)節(jié)運動時轉(zhuǎn)矩隨時間變化曲線,圖11(b)所示為機器人末端角速度、角加速度隨時間變換曲線。在圖11(a)中,Joint1、Joint2、Joint3 為肩關(guān)節(jié)3 個自由度運動過程中的轉(zhuǎn)矩變化曲線,Joint4 為肘關(guān)節(jié)運動時的轉(zhuǎn)矩變化曲線。整個運動過程中,曲線較為平滑,關(guān)節(jié)轉(zhuǎn)矩波動不大,最后逐漸趨于平穩(wěn)。其中,肘腕關(guān)節(jié)運動時所需轉(zhuǎn)矩很小,所以曲線幾乎無變化。圖11(c)為末端位移隨時間變化曲線,由曲線可知,機器人運動過程中在X、Y、Z方向上所能達到的最大位移分別為708 mm、715 mm、550 mm。
仿真結(jié)果表明,機器人在整個運動過程中較為平穩(wěn),末端運動軌跡連續(xù)無間斷,曲線在運動階段無任何突變且曲線的變化符合實際。因此,所設(shè)計的上肢康復(fù)機器人合理且穩(wěn)定性良好,機構(gòu)之間無干涉。
4.3 康復(fù)過程便捷性驗證
為驗證所設(shè)計的上肢康復(fù)機器人在進行肩關(guān)節(jié)內(nèi)收/外展運動時所需時間小于機器人配合運動完成所需要的時間,選取完成肩部內(nèi)收/外展運動的關(guān)節(jié)作為測量對象,設(shè)置仿真時間為16 s,以恒定角速度運動,仿真過程如圖12 所示。圖12(a)所示為肩關(guān)節(jié)內(nèi)收/外展自由度配合完成時的運動過程,從初始狀態(tài)經(jīng)旋外90°到達手臂展開狀態(tài),經(jīng)內(nèi)收30°后反向旋轉(zhuǎn)90°。圖12(b)所示為肩關(guān)節(jié)內(nèi)收/外展自由度直接完成時的運動過程,從初始狀態(tài)直接內(nèi)收30°再反向旋轉(zhuǎn)90°。
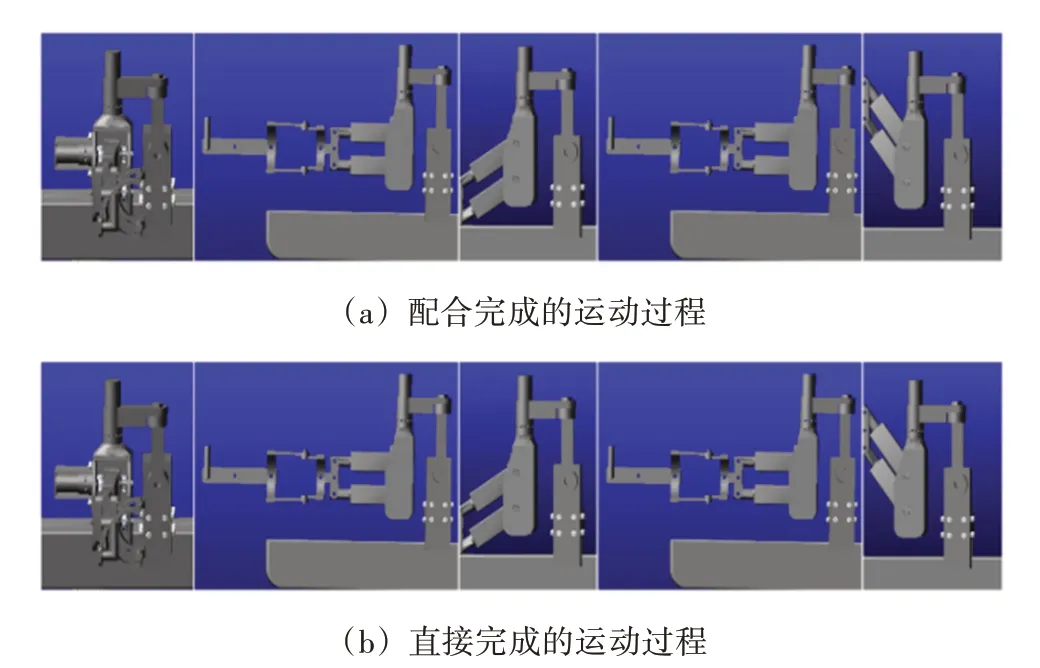
圖12 肩關(guān)節(jié)內(nèi)收/外展運動仿真過程示意圖Fig.12 Schematic diagram of the simulation process of shoulder joint adduction/abduction movement
仿真曲線如圖13 所示,曲線1 為配合運動時角度隨時間的變化,前4 s 內(nèi)為手臂打開的過程,機器人在內(nèi)收/外展方向上并沒有運動;曲線2、曲線3為肩關(guān)節(jié)內(nèi)收/外展運動直接完成時角度隨時間變化曲線。由圖13中可知,在肩關(guān)節(jié)內(nèi)收/外展運動到相同角度時,所需時間相較配合完成該運動減少4 s,而達到相同的運動時間,內(nèi)收、外展運動角度分別增加15°、10°。因此,所設(shè)計的上肢康復(fù)機器人在肩關(guān)節(jié)內(nèi)收/外展運動上更為方便,提高了康復(fù)效率。
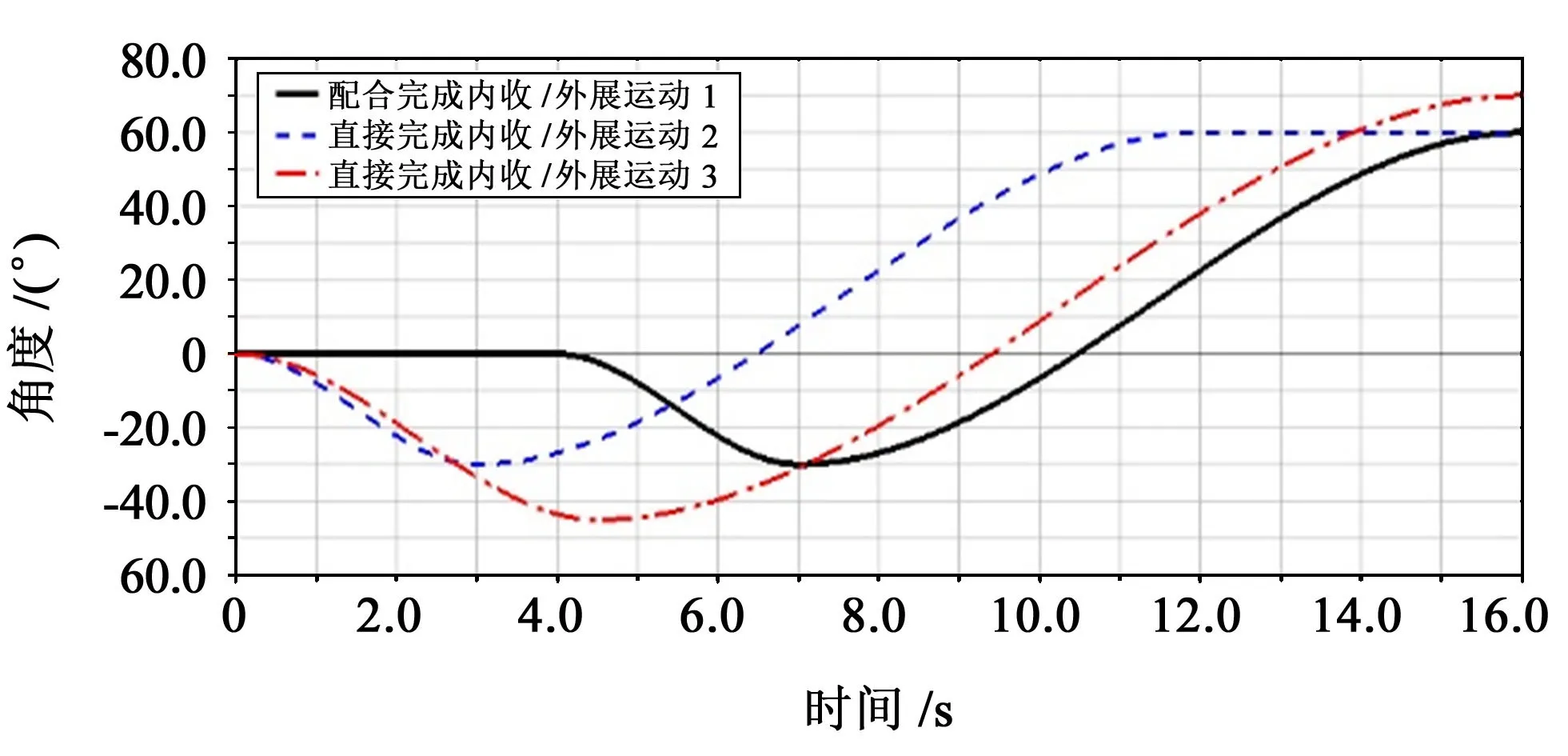
圖13 內(nèi)收/外展運動角度隨時間的變化曲線Fig.13 Change curve of adduction/abduction motion angle with time
5 工作空間分析
機器人的工作空間是機器人進行康復(fù)訓(xùn)練的過程中,上肢在空間中所能達到的最大運動范圍,是衡量康復(fù)機器人設(shè)計是否合理的重要依據(jù)。本文中應(yīng)用蒙特卡洛法,結(jié)合運動學(xué)方程和各關(guān)節(jié)角的運動范圍,利用Matlab 編程,得到機器人仿真結(jié)果如圖14所示。
由圖14 中可知,上肢康復(fù)機器人在X軸和Y軸的工作半徑相同,均為733 mm,在Z軸的工作半徑為559 mm,與運動學(xué)仿真所求得最大位移接近。根據(jù)人體工程學(xué)可知,我國中等人體手臂平均長度為742 mm,表明機器人運動的極限位置與人體上肢動態(tài)極限位置非常接近。因此,所設(shè)計的上肢康復(fù)機器人滿足上肢康復(fù)需求。
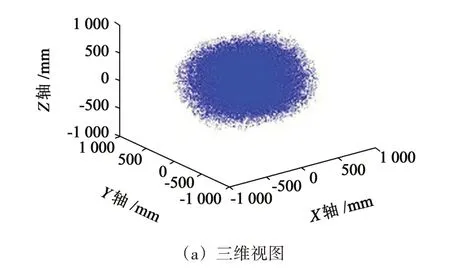
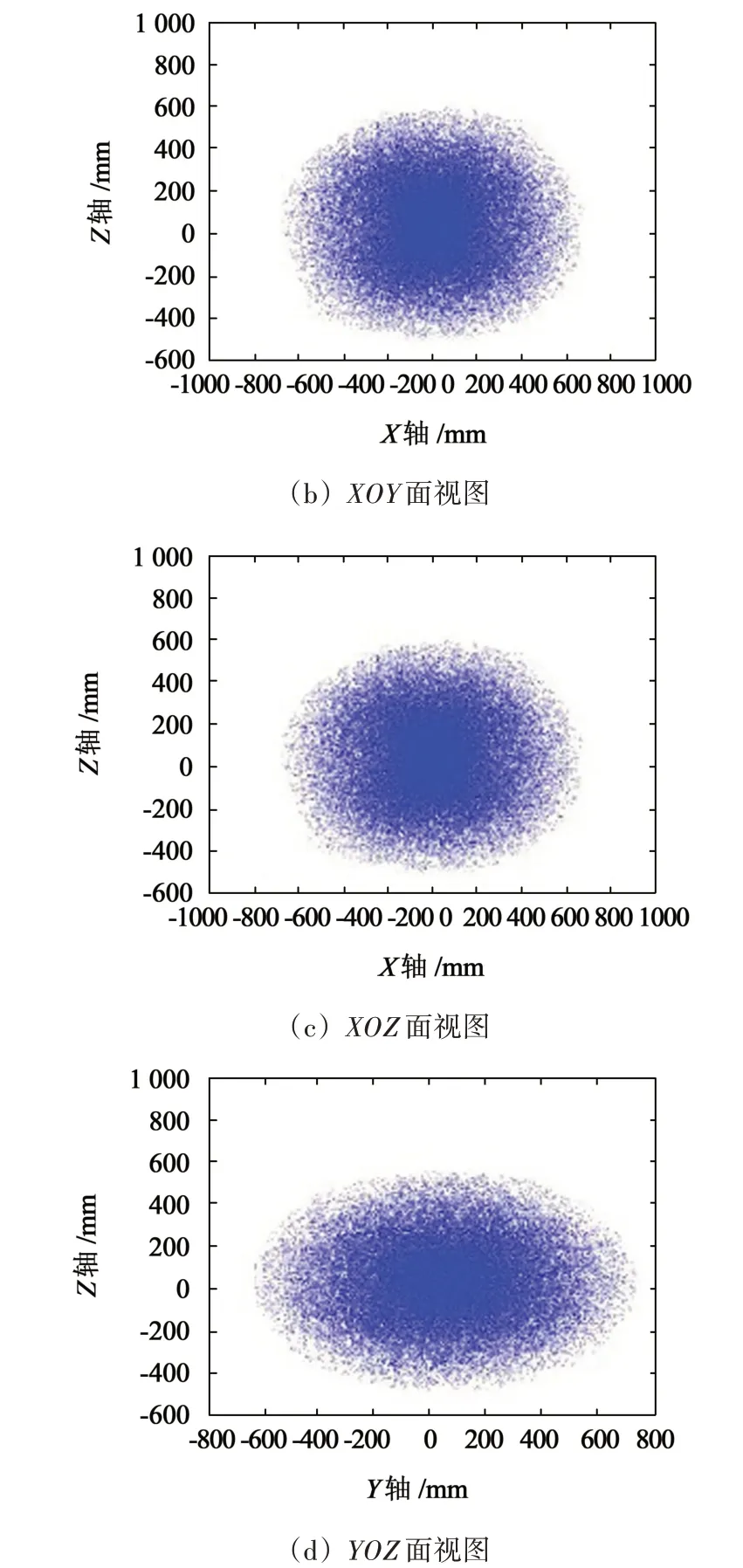
圖14 機器人工作空間仿真圖Fig.14 Robot workspace simulation diagram
6 結(jié)論
提出了一種肩關(guān)節(jié)全驅(qū)動式上肢康復(fù)機器人,設(shè)計肩、肘、腕3個關(guān)節(jié)的結(jié)構(gòu),實現(xiàn)康復(fù)機器人的康復(fù)訓(xùn)練運動;建立機器人的運動學(xué)和動力學(xué)參數(shù)模型,推導(dǎo)運動學(xué)方程;應(yīng)用Adams 建立康復(fù)機器人的虛擬樣機并進行了仿真。結(jié)果表明,機器人在整個運動過程中平穩(wěn),運動軌跡波動較小且連續(xù)無間斷,無突變產(chǎn)生;對比分析肩關(guān)節(jié)內(nèi)收/外展兩種運動方式,該設(shè)計在相同運動角度可減少運動時間;分析機器人的工作空間,得到的運動空間與人體上肢運動范圍接近,由此驗證了所設(shè)計的上肢康復(fù)機器人的合理性。
猜你喜歡
康復(fù)(2023年11期)2023-11-20 07:45:54
康復(fù)(2023年14期)2023-11-20 06:04:54
中老年保健(2021年4期)2021-08-22 07:08:14
護理與康復(fù)(2021年2期)2021-03-05 08:10:44
家庭醫(yī)學(xué)(下半月)(2020年1期)2020-05-11 02:05:46
廣東醫(yī)科大學(xué)學(xué)報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
反射療法與康復(fù)醫(yī)學(xué)(2017年7期)2017-01-16 01:11:02
中國衛(wèi)生(2014年6期)2014-11-10 02:30:50
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年23期)2014-03-01 04:33:45
