淺談大型機器人演繹裝置
2022-10-21 14:02:02邱雙武
科學技術創新 2022年30期
邱雙武
(東莞市環宇文化科技有限公司,廣東 東莞 523000)
引言
近年國內演繹事業蓬勃發展,新業態、新演繹層出不窮。國家提倡夜經濟發展,戶外演出和夜游演出越來越受歡迎,常規的演出裝置及舞美效果已滿足不了觀眾對視覺和體驗感的追求。為了追求不一樣的視覺和體驗效果,我司特打造一款蒸汽朋克時代的重型機器人裝置。其硬朗的外形,充滿力量感,蒸汽朋克式的造型,營造出蒸汽工業時代的強烈氛圍。
1 機器人的主要構成
1.1 機器人介紹
機器人總重量約200 t,高度20 m,手臂展開后寬度40 m,腳步行走輪組跨距11 m。機器人身上有多個表演平臺,身上安裝有風特效、霧森特效、火特效、煙特效及煙花特效等。
1.2 機器人結構
機器人總體結構設計分成五部分。腰身以下鋼結構、腰身以上鋼結構、頭部鋼結構、手臂鋼結構、行走輪機構等。
1.2.1 機器人腰身以下結構 采用優質合金鋼Q355B型材焊接。總體框架固定在底部行走輪機構上,結構采用龍門框架式結構[2-3]。連接方式采用高強螺栓連接固定。設計采用3D 建模,有限元分析,優化和驗算結構在不同工況下的穩定性等[1]。腰身以下結構底部兩邊吊掛儲車庫和電柜房,車庫門采用后拉式結構,驅動方式采用三相電機和鏈條,控制方式采用變頻控制。
1.2.2 腰身以上結構 結構設計同樣采用優質合金鋼Q355B型材焊接。結構形式采用框架式結構[2-3],通過3D建模和有限元分析[1],簡化了結構模型,提高了結構穩定性,減輕了材料重量。用有限元重點分析了手臂旋轉固定底座的結構強度及各種工況下結構變形情況,確保了結構的穩定。
1.2.3 頭部鋼結構 采用弧形框架結構焊接,旋轉方式采用電機驅動回轉支撐傳動。頭部結構外側舞美包裝采用玻璃鋼材料,頭部可以旋轉0°~360°,眼睛可發光,鼻孔可以噴煙等。
1.2.4 手臂鋼結構 一級手臂采用優質合金鋼Q355B,手臂尾部和腰身結構連接處受力最大,需要對此處進行強度和屈曲校核[1]。一級手臂翻轉角度0°~20°,翻轉方式采用油缸,控制采用伺服液壓系統控制。二級臂采用鋁合金6063-T6 焊接制作,重量輕,二級臂固定在一級臂上,二級臂身上包裝采用鍍鋅板封裝,運動部位的封板采用薄鋁板。二級臂翻轉角度0°~90°,翻轉方式采用油缸,控制采用伺服液壓系統控制。二級臂外側安裝有旋轉鋸盤,鋸盤骨架結構采用鋁合金管材焊接,外側封板采用鋁合金和EVA 材料。鋸盤的驅動方式采用液壓馬達驅動鋸盤齒輪無限旋轉。
腳底分為上場門和下場門,每個場門右分為儲車庫和電柜房。儲車庫可以停放演繹用車輛,電柜房擺放機器人電箱和特效設備電箱,上場門電箱負責給腰身以下設備提供電力,下場門電箱負責給上場門設備提供電力。
手臂翻轉液壓油站,火特效燃料箱等安裝在腰身以上機構的二層平臺上。靠近上場門液壓站負責控制上場門機械手臂,靠近下場門液壓站控制下場門機械手臂。火特效燃料箱負責腰身以上噴火設備的控制。
1.2.5 機器人行走機構 機器人總體可以前后移動,行走在兩條重型軌道上,行走輪軌道采用兩條平行的QU70 鋼軌,單根鋼軌總長度約25 m,兩根軌道中心跨度11 m。考慮機器人結構自重和載荷較大,行走距離長,單個輪子承載力大,為了行走時確保每個輪子受力均勻,特將行走輪結構形式采用平衡橋結構進行設計,確保每個行走輪都能很好的接觸軌道面,能很好的承受荷載。單邊合計8 套行走輪,長度約9 m,安裝2 套動力驅動輪,6 套行走惰性輪,兩邊合共計16 套輪組,其中有4套驅動動輪系統。驅動電機采用三相異步變頻電機,電機參數為:AC380 V 15 KW,單制動電機,每套電機尾部安裝有編碼器。四套電機通過變頻器同步驅動。行走系統的設計和安裝進度要求高,行走輪組的8 個輪子要在一個平面內,平面度誤差2 mm/8 m,平衡橋剛性形變不大于跨度的1/1 000。平衡橋結構采用Solidworks2016建模,采用有限元分析結構的強度和撓度[1]。平衡橋采用先進的CNC 加工安裝面,整套行走輪組系統在工廠加工、安裝、調試達到設計要求后,整體包裝發送現場拼裝。軌道安裝測量運用水準儀和專用管道間距檢具測量,軌道面高差2 mm/10 m。軌道兩側做成活動蓋板,便于軌道調整和檢修。平衡橋結構設計見圖1。
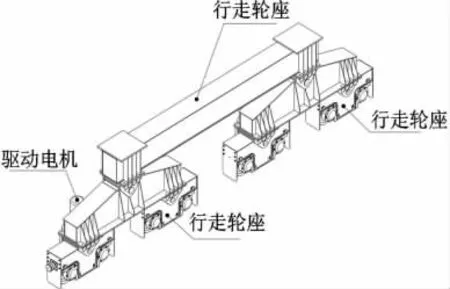
圖1 行走系統平衡橋結構
1.3 機器人腰身以上動力系統
腰身以上旋轉機構傳動系統采用大型回轉支撐和三相異步電機驅動,大型回轉支撐直徑2 500 mm,外齒輪。回轉支撐底部固定在腰身以下機構底座上,上部固定在腰身上部鋼架底座上。回轉支撐以上部分可以選擇,電機不隨上部結構旋轉,電機采用三相異步電機AC380 V 15 KW,單制動,減速器采用工業級行星減速,電機尾部安裝有旋轉編碼器,電機控制采用變頻調速控制。
1.4 機器人手臂動力系統
機器人手臂分成一級臂和二級臂,手臂展開后根部彎矩受力最大,一級臂根部結構受力較大,設計和制造上采用Q355B 合金鋼材焊接,通過3D 建模和有限元分析,確定根部最有利的結構形式[1]。二級臂受力較小,主要受力為自身重量和鋸盤重量,結構設計上采用輕型鋁合金型材6063-T6 焊接,鋸盤也采用6063-T6 焊接,手臂包裝材料為EVA 和薄鋁板,鋸盤盤面采用鋁皮,鋸齒采用輕量化EVA組合。
一級手臂旋轉采用大型回轉支撐和三相異步電機驅動,電機采用變頻調速控制。翻轉采用伺服控制的液壓油缸,翻轉角度0°~20°。
二級手臂翻轉采用伺服控制的液壓油缸,翻轉角度0-180 度。鋸盤采用液壓馬達驅動,轉速7 r/min,無限旋轉。手臂的結構設計圖見圖2。
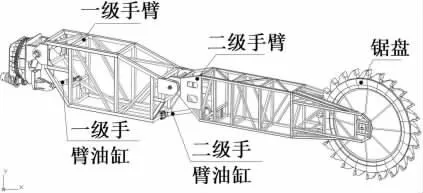
圖2 機器手臂結構
1.5 機器人裝置區域分布
機器人主體鋼結構采用合金鋼型材Q355B 焊接,腰部以下結構采用龍門框架式結構。龍門框架固定在行走機構的平衡橋橫梁上。儲車庫和電柜房掛在龍門框架底部,腰身以上鋼結構直接固定在腰部回轉支撐上表面。腰身平臺一層為設備安裝層,液壓站和噴火主機柜等都布置在該平臺。腰身平臺二層留有多個表演用的空間平臺,腰身上部鋼結構正面和背面都留有步梯和爬梯,各個平臺具有聯通。機器人頭部固定在腰身機構頂端,頭部可以0°~180°旋轉,機器人的眼睛可以發出紅色的光,鼻孔可以噴煙。機器人結構圖見圖3,機器人效果圖見圖4。
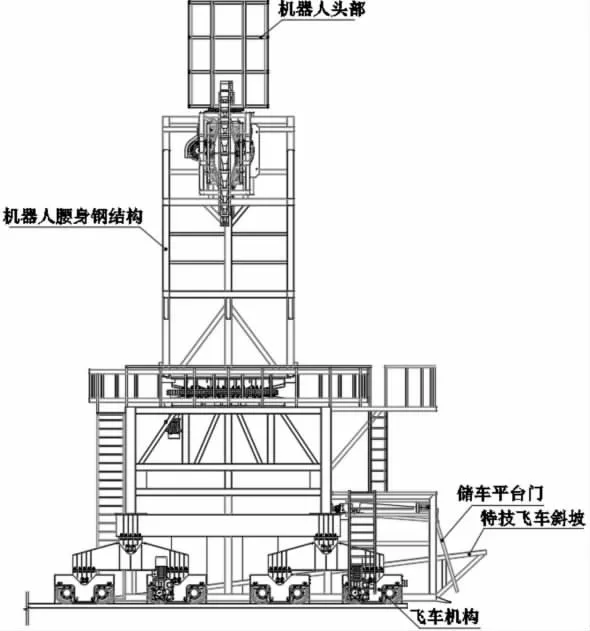
圖3 機器人結構

圖4 機器人效果
2 機器人電氣控制系統的構成
2.1 機器人裝置行走供電方式
采用特殊定制自動卷線器同時傳輸強電信號和弱電信號。行走驅動采用4 套三相異步電機,驅動控制采用現場總線控制方式,電機采用變頻調試控制。電機同步性采用跟隨和同步控制,確保電機同步性,電機行程和位置精準度通過電機尾部編碼器實時測量、比較,調整,保證4 套驅動電機的一致性和同步性[5-7]。
2.2 腰部動力系統
腰部旋轉驅動系統和頭部旋轉驅動系統采用三相異步電機,變頻調速控制。位置和角度測量通過旋轉編碼器和行程限位開關檢測。
2.3 手臂控制系統參數
一級手臂翻轉0~20°,采用伺服液壓站,通過恒壓力,變流量控制調節液壓油缸伸縮速度。二級手臂翻轉0~90°,采用伺服液壓站,通過恒壓力,變流量控制調節液壓油缸伸縮速度。液壓站油路塊內置壓力傳感器,單向閥和防爆閥等安全措施,電機采用伺服控制,啟動和停止平穩,無抖動。
2.4 門控制方式
儲車庫開合門,采用電機和鏈輪驅動系統,門的開合方式為后拉滑動式,門打開后,翻轉90°,門位于車庫頂部。導向機構采用滾輪直線導軌,精度高,無間隙,運行無噪聲。控制電機采用變頻調速控制,啟動和停止平穩,無振動。
2.5 胸部開合門系統
胸部開合門采用推拉式結構,傳動方式采用齒輪和齒條嚙合,驅動電機固定在鋼架上,齒條和門框架固定在一起,齒條隨門一起左右移動。
2.6 安全保障措施
安全措施保障,機器人行走、腰部旋轉、頭部旋轉、手臂旋轉、手臂翻轉等均設內部軟限位,演出位置限位及極限限位,機械硬限位等。機器人動作和周邊配套設備相互互鎖,確保機器人運行安全。急停開關設計位于控制室、機器人身上平臺,機器人腳底電氣控制柜等位置。
3 機器人運行情況
3.1 結構運行情況
總體運行穩定,前進和后退驅動系統同步性好,無啃軌現象。電纜卷線器運行順暢,電纜展開平整,無剮蹭,扭曲。供電系統運行穩定,電力和信號傳輸穩定,各項安全指標均達到設計要求。
3.2 手臂運行情況
手臂翻轉啟動和停止抖動小,運行速度快,系統響應快等。液壓系統運行正常,無異響和異常發熱情況。油缸、管道和接頭無漏油,振動,電機驅動系統運行無異響,發熱等。
3.3 機器人總體聯動情況
總體聯動動作協調,運行軌跡平滑,總體無抖動,滑行,無異常噪音,運行穩定,多次測試、運行未發現異常,總體測試運行符合設計要求。
3.4 機器演出情況
機器人至開始投入演出以來,設備運行穩定,操作簡便,保養維護方便,受到演員及甲方領導的多次肯定。其大體量和蒸汽朋克風格,吸引了無數的觀眾來一睹它的表演,機器人裝置成了僑城園區標志性的機械裝置和網紅打卡點。
4 電氣控制原理
電氣控制原理圖見圖5。

圖5 電氣控制系統
4.1 電氣控制方式
電氣控制機械控制臺布置在機器人外側專用控制功能房。機器人腳底電柜房電柜也可對機器人進行控制。機械控臺對機器人的控制通過現場總線,采用有線連接控制[5-7]。
4.2 機器人運行情況
機器人設備作為表演裝置,他的運行軌跡和動作都是提前編排好的,演出時通過自動控制程序,自動運行場景,自動監控,操控人員及時監控及控制。
4.3 機器人安裝措施
機器人的運行動作和周邊其它設備均設有位置互鎖。操作時,機械控制人員按下啟動按鈕,機器人自動按照編好的場景程序運行,操控人員全程監控,發現異常,及時停止,確保設備運行穩定、安全[5-7]。
4.4 機器人應急措施
機器人裝置設置有多個緊急停止開關,位置分布于機械控臺、電控柜、卷線器、腰身旋轉平臺等。遇到突發事件,專業培訓保障人員及時就近按下急停開關。
5 結論
該機器人裝置各項指標都滿足設計要求,至參與演出以來,運行穩定,結構可靠,故障率低等。其蒸汽朋克式的風格和機械質感的外形,深受觀眾的喜愛。隨著國內演繹事業的不斷發展,國家大力提倡夜文化、夜經濟,我們將打造出更多的符合大眾審美的機架類裝置。
猜你喜歡
建材發展導向(2022年14期)2022-08-19 02:10:10
建材發展導向(2022年14期)2022-08-19 02:08:18
山東冶金(2022年1期)2022-04-19 13:40:48
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年9期)2021-07-16 07:10:58
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中國公路(2017年15期)2017-10-16 01:31:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
