礦用防爆輔運車輛自動駕駛線控轉向系統研究
2022-10-24 07:32:24陳永峰韋建龍
金屬礦山 2022年9期
陳永峰 韋建龍
(1.陜西鐵路工程職業技術學院鐵道裝備制造學院,陜西 渭南 714000;2.中國煤炭科工集團太原研究院有限公司,山西 太原 030006)
《關于加快煤礦智能化發展的指導意見》指出,到2025年大型煤礦要基本實現智能化,井下重點崗位機器人作業,實現智能連續作業和無人化運輸[1]。目前煤礦井下輔運設備還停留在人工感知操作階段,靠人的感覺、經驗和技術來操作運輸設備大大影響了煤礦機械技術的發展[2-3]。煤礦井下環境復雜,長時間繁重、復雜的操作勞動易造成駕駛人員疲勞,從而發生碰撞及側翻事故,對駕駛人員、設備造成重大傷害,對作業人員的安全保障形成巨大挑戰,因此亟需高效、安全、智能的輔助運輸方案。煤礦輔運車輛運行路線相對固定、運行道路封閉,為無人駕駛技術提供了有利的實施空間[4-5]。研發適應性好、越障能力強,具有良好控制能力和信息處理能力,并能實現自動駕駛功能的煤礦輔運車輛,對于現代化煤礦實現安全高效綠色開采具有良好的促進作用[6-8]。
煤礦輔助運輸要實現智能化、無人化、機器人化,輔運設備必須具有信息監測和自主處理能力,從而實現自動駕駛、路徑循跡等功能。線控轉向技術作為車輛自動駕駛的關鍵基礎技術,其控制精確性直接決定著車輛自動駕駛的整體性能。20世紀60年代末,奔馳公司已開始對轎車前輪線控轉向系統進行了研究,并進行了F400Carving車型應用驗證;博世公司就線控轉向系統的安全性及可靠性進行了論證[9-10];國內同濟大學提出四輪驅動電動車電子轉向系統方案并設計出國內首輛四輪微型概念車“春暉3號”[11];武漢理工大學及中國科學院合肥智能機械研究所都對電子轉向系統的控制策略技術進行了深入研究;工程機械巨頭卡特彼勒提出了露天礦卡無人駕駛方案并推出了相關產品;吉林大學王同建博士團隊對裝載機線控轉向技術應用方面進行了深入研究,并在控制算法、容錯方法等方面取得了一定的進展[12]。然而,上述研究都是針對地面轎車或地面工程機械,煤礦井下地形復雜、障礙多、坡陡彎急、行駛空間有限、光線照明差,煤壁、粉塵在一定程度上會吸收激光雷達波,導致信號減弱從而使得設備對周圍工況檢測的準確性大打折扣。因此煤礦井下輔運設備對指令信號后處理的響應性、反應靈敏度等方面都要高于地面車輛,為提高系統響應性和改善系統精準控制性能,本研究建立了礦用輔運車輛自動駕駛線控轉向系統數學模型,設計了基于PID的閉環控制器,實現了PID參數在線整定,并對自動駕駛轉向系統進行了仿真驗證。
1 輔運車輛線控轉向系統設計
1.1 系統組成
以某礦用防爆輔運車輛為基礎,設計了一套自動駕駛線控轉向系統(Steer-by-Wire System for Automatic Driving,SWAD),系統主要由轉向液壓泵、安全閥、液壓轉向器、電磁閥組、轉向電機、轉向油缸、轉向執行機構、角度傳感器、轉向控制器、轉向電機驅動器及液壓油箱等元件組成。礦用防爆輔運車輛SWAD結構如圖1所示。
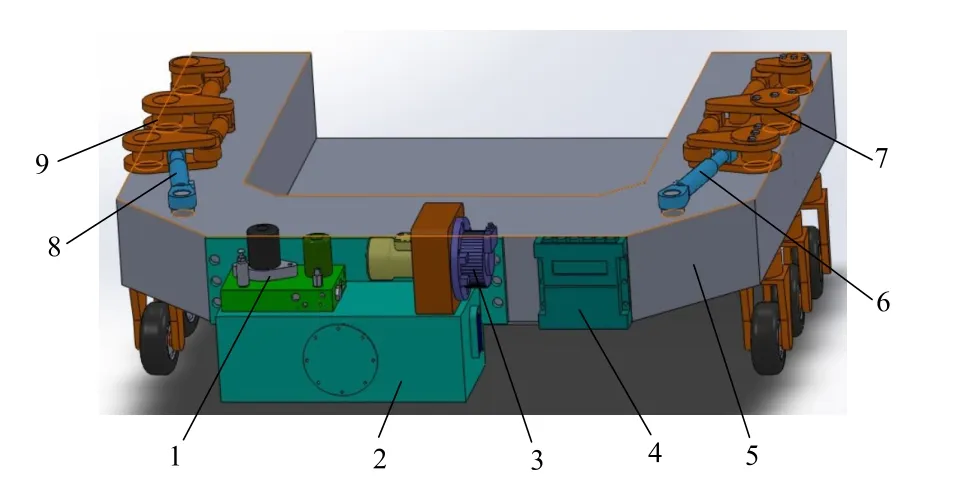
圖1 礦用防爆輔運車輛SWAD結構Fig.1 Mine explosion-proof auxiliary transport vehicle SWAD
轉向油缸的一端固定在機架大梁上方,另一端與轉向機構鉸接(圖2);液壓泵、安全閥、電磁閥組、轉向器及轉向電機采用模塊化集成式設計,通過安裝閥塊固定在液壓油箱上,轉向電機通過聯軸塊與液壓轉向器直連,液壓油箱整體固定在機架前方;轉向控制器和轉向電機驅動器分別固定在機架前方液壓油箱兩側,既使得空間利用最大化又縮短了控制器與驅動器、轉向電機之間的距離,減少了線路分布。

圖2 轉向機構結構Fig.2 Steering mechanism structure
1.2 系統功能結構
SWAD系統根據功能結構分為轉向執行機構、液壓動力系統以及轉向控制系統。執行機構由轉向油缸、轉向連桿機構以及輪胎構成,轉向油缸活塞桿與轉向連桿機構連接,缸筒固定連接在機架上,通過轉向器控制轉向油缸動作推動執行機構旋轉,實現輔運車輛轉向。選擇變量液壓泵作為動力源,為轉向系統提供動力,基于負載反饋控制機理并根據轉向阻力提供匹配的壓力、流量輸出,優化系統節能效果[13-14],安全閥用于限定系統最大壓力防止系統沖擊造成元件損壞。轉向控制系統是自動駕駛線控轉向系統的核心,主要由轉向控制器、電磁閥組、電機驅動器、轉向電機、液壓轉向器、角度傳感器和CAN通信系統組成,主要作用是接收上位機轉向指令信號并將信號發送給驅動器控制轉向電機實施上位機轉向指令,同時通過轉向執行機構上的角度傳感器采集實際轉向角度即反饋信號,控制器計算目標轉角和實際轉角的偏差值,以該偏差值為輸入值,PID控制器進行計算輸出,控制轉向電機驅動液壓轉向器進行轉向修正,從而完成轉向,實現對自動駕駛的精準控制[15-16]。自動駕駛線控轉向系統結構如圖3所示。
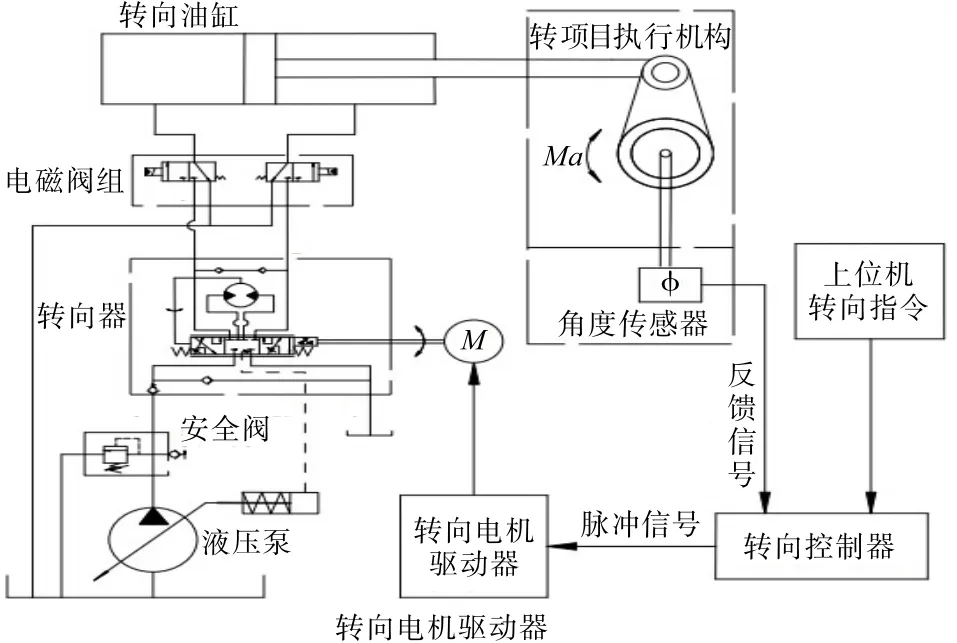
圖3 自動駕駛線控轉向系統結構示意Fig.3 Schematic of the structure of automatic steer-by-wire system
2 SWAD控制程序設計
2.1 關鍵參數分析
礦用輔運車輛要準確、穩定、快速地實現轉向必須具備兩個基本功能:① 輔運車輛在限定路徑循跡行駛過程中,根據實際路況對其可能的轉向方向和轉向角度做出正確判斷,即轉向控制器必須根據上位機的預設轉向目標指令信號精準控制轉向輪向預設方向轉動,實現輔運車輛的轉向方向控制;② 適宜的轉向速度控制,即根據輔運車輛實際運行的不同轉向條件設定合理的轉向速度值。如行駛速度相同時,小轉彎半徑轉向速度快,大轉彎半徑轉向速度慢;轉彎半徑相同時,不同的行駛速度需要的轉向時間也不相同。因此,SWAD系統必須兼顧輔運車輛轉向方向、角度和轉向速度的聯合控制,才能真正意義上實現輔運車輛自動駕駛轉向系統的精準控制。
2.2 工作原理
SWAD控制系統采用典型閉環控制系統,系統控制系統框架如圖4所示。上位機通過CAN總線將目標轉角信號輸入微控制器,控制器根據目標轉角信號向轉向電機驅動器發送脈沖信號u(t),驅動器接收到信號后驅動轉向電機動作,同時電磁閥組得電接通,轉向器向轉向油缸輸出與目標轉角相應的流量控制油缸動作,完成輔運車輛轉向輪目標轉角輸出。同時輔運車輛實際轉角測量裝置的角度位移傳感器檢測輔運車輛的實際轉角信號,并通過模數轉化模塊將轉換信號發送給微控制器,形成閉環控制系統的反饋信號,控制器進行目標轉角r(θ)和實際轉角y(θ)偏差運算得出轉角偏差e(θ)信號值[17]。PID控制算法根據偏差信號值計算得到轉向電機控制脈沖信號,轉向電機驅動器根據信號控制轉向電機轉速,進而驅動液壓轉向器動作,實現輔運車輛轉向輪的轉向方向、速度及角度控制。偏差信號的正負決定了轉向電機的轉動方向,偏差信號大小決定轉向角度和速度大小,通過偏差信號控制轉向輪轉向和轉速來減小偏差值,不斷重復上述糾偏過程,最終使得偏差值小于系統控制精度誤差設定值,完成輔運車輛平穩、快速地跟蹤目標轉角,實現輔運車輛自動駕駛精準轉向控制。
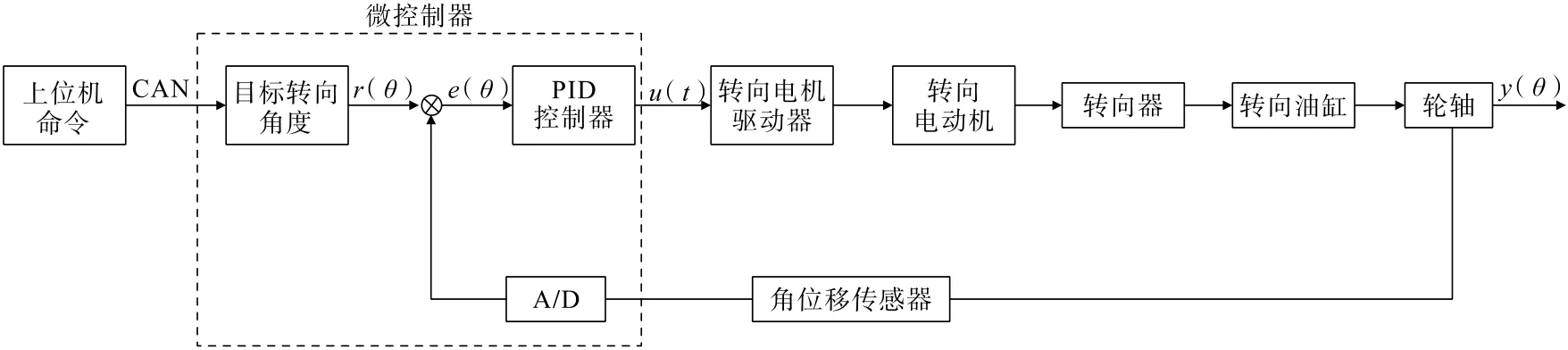
圖4 SWAD控制系統框架Fig.4 Framework of SWAD control system
根據阿克曼轉向幾何原理,輔運車輛同軸內、外側轉向輪的轉角一定不相等[18],因此輔運車輛轉向油缸采用雙作用單桿形式,利用轉向油缸有桿腔和無桿腔有效作用面積的差異,實現在相同供油量情況下,轉向油缸活塞桿不同的運動速度和運動位移輸出。輔運車輛實際轉向時,一側轉向油缸有桿腔進油而另一側轉向油缸無桿腔進油。在相同偏差信號輸入情況下,確保兩側轉向油缸不同的輸出來滿足阿克曼轉向幾何原理,防止輔運車輛兩側車輪轉向時發生既有滾動,又有滑動,增加轉向阻力,導致轉向困難,輪胎磨損嚴重。由以上分析可推導出系統PID控制算法的數學表達式為

式中,u(t)為脈沖頻率,Hz;Kp為比例系數,Hz/(°);Ti為積分系數,s;Td為微分系數,s;e(t)為t時刻目標轉角與實際轉角的偏差,(°)。
結合全液壓轉向器和轉向電機參數,將上式計算所得的脈沖頻率轉化為周期信號,從而對轉向電機進行控制。
2.3 PID控制程序流程
PID控制器分為比例、積分、微分3個環節,實際操作中通過調節Kp、Ti、Td這3個系數來實現被控對象的最優控制[19]。SSAD系統的PID控制程序的運行流程如圖5所示。
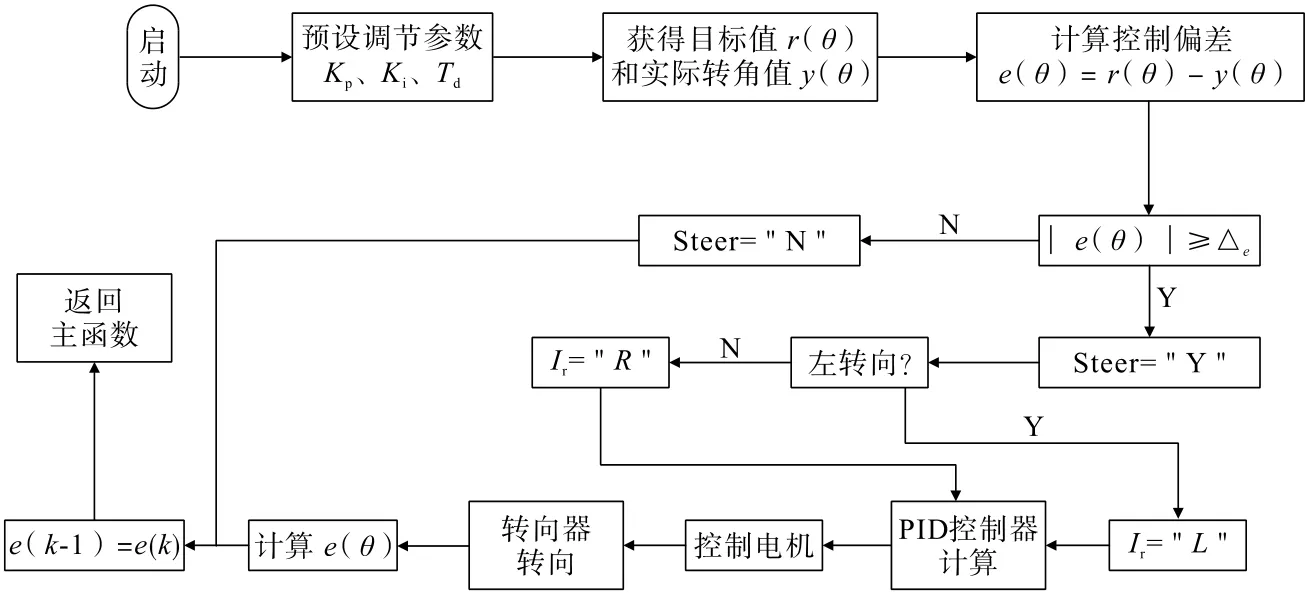
圖5 系統PID控制程序流程Fig.5 Operation flow of the PID control program of the system
3 SWAD系統臺架試驗
3.1 PID轉角偏差控制系統
礦用輔運車輛SWAD系統是針對煤礦井下輔運設備設計研發,是基于某礦用重型支架輔運車輛為模型進行搭建。根據輔運車輛實際參數按比例縮放的裝配實體如圖6所示。該型車輛采用多輪多軸轉向結構,可實現直行、斜行、多角度轉向、原地掉頭等多種行駛模式。
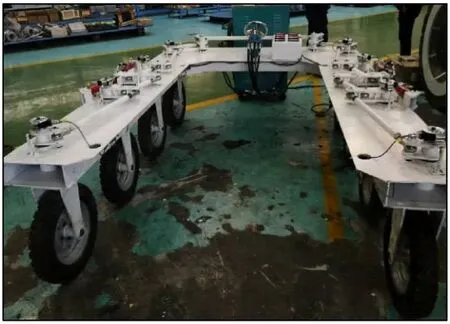
圖6 輔運車輛比例縮放實體Fig.6 Assisted robot scaling entity
系統轉向機構采用四油缸連桿機構(圖7),每根轉向油缸單獨控制1個車輪進行轉向,通過控制器(圖8)實現各個轉向油缸不同的輸入,從而控制單個車輪偏轉不同的轉向角度,實現輔運車輛多模式行駛。
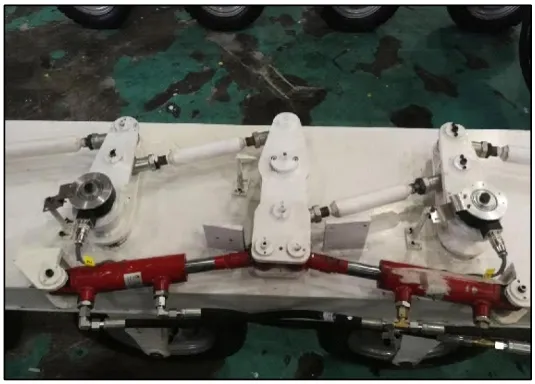
圖7 轉向連桿機構Fig.7 Steering link mechanism

圖8 轉向系統控制器Fig.8 Controller of steering system
試驗時選擇在良好的水泥硬化路面進行理想工況下的轉向模擬試驗。根據臨界比例度法計算初選PID控制系統調節參數為Kp=72 Hz/(°)、Ti=60 s、Td=15 s,設定轉向區間角度為5°~30°,測得如圖9所示的SWAD系統跟蹤正弦信號轉向曲線。
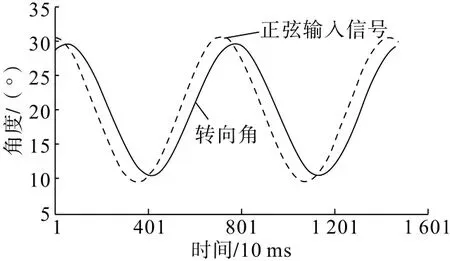
圖9 系統正弦跟蹤曲線Fig.9 System sinusoidal tracking curves
由圖9可知:在上述初步確定的調節參數下,系統轉向過程中動態性能較好,能夠對指令信號做出快速響應;系統幅值出現一定程度失調,系統穩定性有所偏差。
3.2 PI轉角偏差控制系統
PID控制系統中比例參數Kp的作用是加快系統的響應速度,提高系統的調節精度。積分作用參數Ti的最主要作用是消除系統的穩態誤差,Ti過小,系統的穩態誤差將難以消除,影響系統的調節精度;Ti越大,系統的穩態誤差消除的越快。微分作用參數Td的作用是改善系統的動態性能,其主要作用是在響應過程中抑制偏差向任何方向變化,對偏差變化進行提前預報,Td過大,會使響應過程提前制動,延長調節時間,從而降低系統快速響應性能。
從煤礦井下實際運行工況出發對系統進行分析可知:①由于煤礦井下地形復雜、障礙多、輔運車輛的實際運行狀況具有多變性,轉向角度、方向、轉向時間等因素都是不確定的,因此偏差信號也是毫無規律地隨機變化。控制器中微分環節是根據偏差信號變化趨勢進行超前調節,因此微分控制對于礦用輔運車輛SSAD轉向系統的控制作用有限,可考慮去除微分環節控制。②為確保安全性,煤礦井下重型輔運車輛在運輸過程中行駛速度較低,因此SWAD系統的響應性遠比精確性重要,可在允許誤差范圍內,確保系統響應性能的同時適當降低系統精準性能。
根據上述分析對調節參數取值進行重新設定,根據系統曲線圖增大控制系統比例系數取值,設定Kp=80 Hz/(°)、Ti=142 s,去除微分環節,重新進行場地試驗,得到如圖10所示的改進系統正弦信號跟蹤曲線圖。
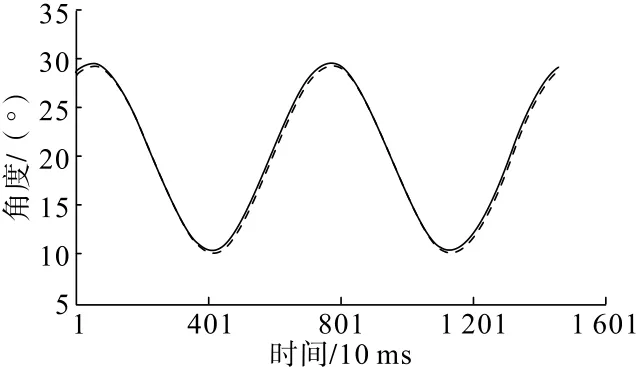
圖10 改進系統正弦跟蹤曲線Fig.10 Improved system sinusoidal tracking curves
由圖10可知:改進后的PI控制系統在響應速度、系統幅值失調以及系統穩定性偏差等方面都得到了改善,系統輸出性能滿足設計要求。
搭載改進控制系統的輔運車輛分別在進行左轉和右轉試驗過程中,轉向油缸行程與轉向電機測試數據曲線如圖11所示。
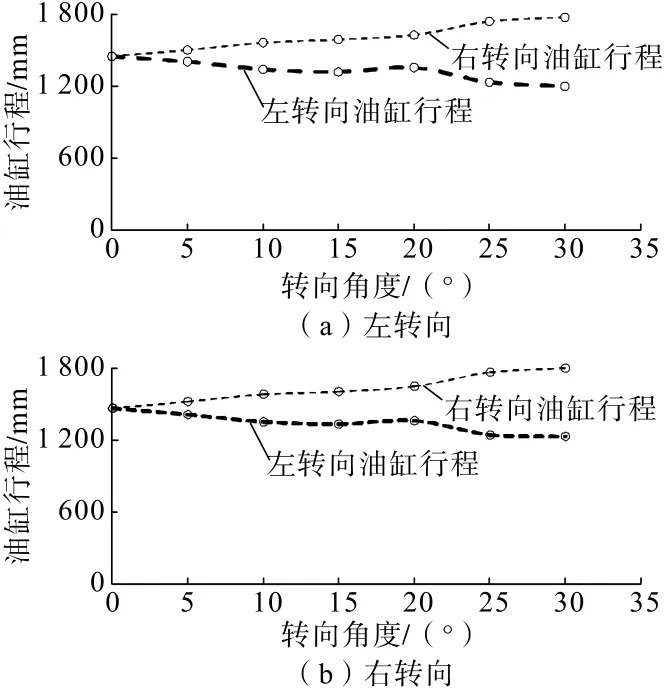
圖11 轉向測試曲線Fig.11 Steering test curves
SWAD轉向系統臺架試驗證明:參數改進后,系統消除了震蕩,同時系統響應性也得到一定程度的提升,系統轉角偏差由3.8°降低至2°,達到預期目標,可滿足礦用輔運車輛的實際工況需求。
4 結 論
(1)研制了一套基于雙液壓缸轉向的電液線控轉向系統,采用了大積分增益的PI控制系統,提高了控制系統的魯棒性,系統抗干擾能力強、響應快速、超調量小。
(2)對于礦用重型支架輔運車輛而言,車輛運行路徑相對固定,運行環境單一,車輛行駛速度緩慢,但路況較差,采用該系統不僅結構簡單、故障率低,而且系統的大積分增益環節可消除坑洼復雜路況造成的車輛偏差影響,抗干擾強,可為煤礦同類型車輛實現自動駕駛提供技術參考。
(3)對于行駛速度較慢的礦用重型支架輔運車輛而言,采用PI控制可提高系統的快速響應性;但對于車速快、慣性大的設備,該控制系統存在震蕩環節長的局限性,需考慮前饋控制、大滯后控制等其他控制方案。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
