應用慣性傳感單元測量下肢力線的研究
2022-10-24 07:18:08王家麟閆俊蘭楊鵬飛趙家鑫劉暾王思源王偉
實用骨科雜志 2022年10期
關鍵詞:測量
王家麟,閆俊蘭,楊鵬飛,趙家鑫,劉暾,王思源,王偉*
(1.西安交通大學第二附屬醫院骨關節外科,陜西 西安 710000;2.西北工業大學,陜西 西安 710072)
骨關節炎(osteoarthritis,OA)是一種關節退行性疾病,以膝關節軟骨變性和丟失及關節邊緣骨質增生、滑膜炎等癥狀為主的慢性關節疾病稱為膝骨關節炎(knee osteoarthritis,KOA),典型表現有膝關節部位的疼痛、畸形和功能障礙[1],是臨床常見、具有較高致殘性的骨關節病。KOA的治療目的是緩解或消除疼痛、矯正畸形和改善功能,提高患者的生活質量。結合骨關節炎的特點,臨床醫師根據疾病的不同階段,針對KOA各期的臨床特征及病理變化,可選擇基礎性治療、藥物性治療、修復治療以及重建性治療等相應階梯治療方法。脛骨高位截骨術(high tibial osteotomy,HTO)為KOA最常用的截骨保膝的手術方法。HTO的核心理論依據是對下肢力線偏移的糾正,使異常的下肢機械軸由承重較大區域移向另一側的承重較小區域,使膝關節受力從關節內側為主變為內外側受力平衡或輕度外側受力為主[2],從而有效延緩膝關節內側間室的破壞,使得已經受損的內側關節軟骨不再受到過大的壓力而有修復再生的條件,進而達到改善KOA患者臨床癥狀、減輕疼痛、延遲膝關節置換的時間,甚至最終避免置換,保留患者自身膝關節的目的。臨床上,通過股骨頭中心點到踝關節脛骨下端中心點的直線被稱為下肢機械軸線或下肢力線。在冠狀面上,根據該定義,當膝關節中心遠離該直線時就存在對線異常,盡管一般認為在對線正常時下肢機械軸通過膝關節中心點,但是實際上下肢力線在多數情況下是從膝關節中心點的稍偏內側處經過[3]。
對于KOA患者,臨床上常通過拍攝負重位雙下肢全長X線片來判斷患者由于膝關節的軟骨磨損、脛骨股骨發育或后天損傷、軟組織不平衡等所造成的下肢力線異常的情況[4-5]。在HTO或其他膝關節手術的圍手術期需要獲取患者下肢力線的各項數據,用以在術前進行手術設計,術中監測矯正效果,術后監測患者恢復效果。因此,下肢力線及相關參數的測量對于治療KOA十分重要。但目前臨床上HTO術前規劃仍主要采用傳統的X線攝片的方法來檢測患者的下肢力線,術中調整力線過程中需要進行多次透視,延長手術及麻醉時間,增大了術者及患者放射線的暴露量,如果能找到一種測量方便、準確且無輻射的測量方法,既可以用于術前規劃,同時也可以開發為術中的力線監測裝置,用于手術中輔助力線矯正,一定會更好地得到推廣應用。計算機輔助導航技術是目前較成熟的一種臨床手術輔助技術[6-10],在骨科手術中可以精準地定位人體骨骼目標點,實現精準手術操作[11-13]。基于慣性傳感器的導航技術,是研究下肢力線測量方法的新領域[14]。慣性傳感器等原件因其自身具有測量準確、便攜等優點[15],使其運用于人體測量下肢力線具有其他方法所不具備的優勢[16-20],目前臨床上已有應用慣性傳感器輔助于骨科手術[21-25]。隨著原件測量準確性的提高,不再依賴于傳統下肢X線透視的方法,就可以準確測量下肢力線。本研究設計出一種基于慣性傳感單元的便攜式下肢力線測量裝置,通過不同體位在多種特定運動方式下測量下肢力學軸線的相關數據,并與臨床常用方法測量結果進行比較,探索使用該裝置測量人體下肢力線的適宜姿勢,并評價其可行性及測量準確性,為未來運用于HTO等保膝手術下肢力線的監測提供一種無輻射、準確、便攜的方法。
1 資料與方法
1.1 研究對象 本研究選取15名正常成人作為志愿者,確保志愿者不存在任何骨骼肌肉損傷情況及對主動運動有影響的疾病,也不存在認知方面的缺陷,志愿者均簽署了書面知情同意書,該研究獲得了西安交通大學第二附屬醫院倫理委員會批準。其中男性10名,女性5名;年齡22~27歲,平均(25.4±1.4)歲。男性身高為1.67~1.83 m,平均(1.75±0.04)m;女性身高為1.63~1.68 m,平均(1.65±0.02)m。志愿者的信息見表1。
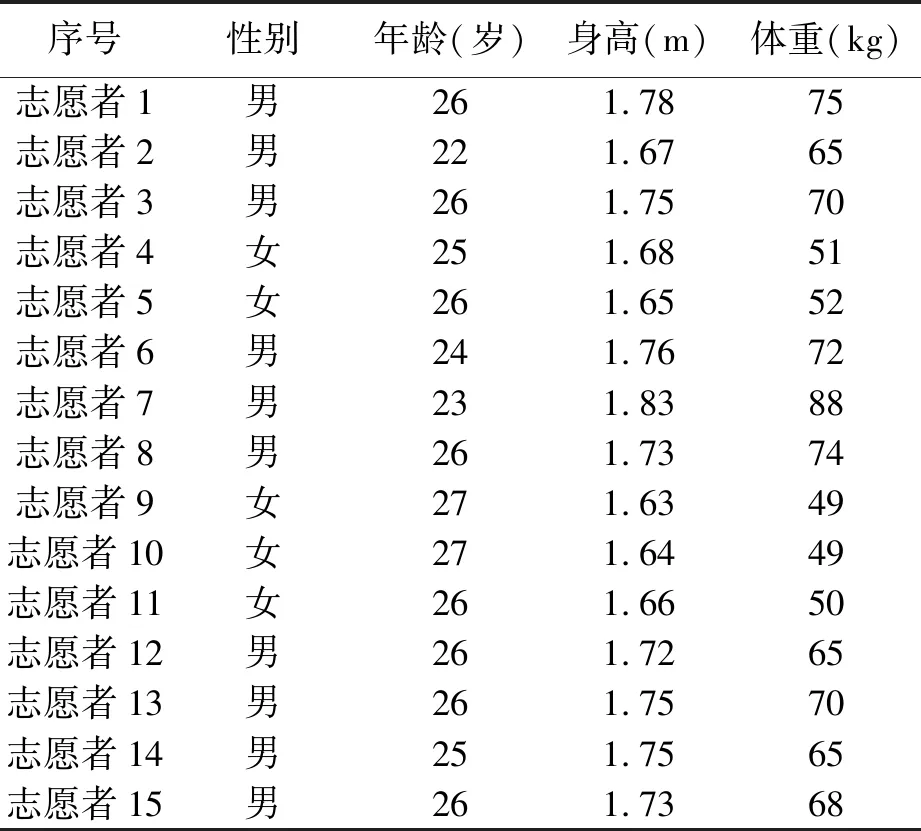
表1 志愿者基本信息表
1.2 實驗方法
1.2.1 慣性傳感單元的固定與校準 本研究采用四個慣性傳感器(見圖1a)。以右腿為例,志愿者充分暴露右腿膝關節及踝關節,將四個慣性傳感器(分別編號位1,2,3,4)固定于志愿者膝關節內外側和踝關節內外側。研究者觸及志愿者股骨內外側髁以及內外踝,將1號傳感器固定于股骨內側髁,2號傳感器固定于股骨外側髁,利用彈力帶將1、2號慣性傳感器通過外殼連接纏繞固定于膝關節,將3號傳感器固定于內踝側,4號傳感器固定于外踝側,并利用彈力帶將3、4號慣性傳感器通過外殼連接纏繞固定于踝關節,如圖1b所示。
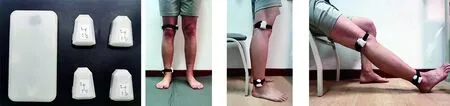
a 慣性傳感單元大體照(4個慣性傳感器和信號接收裝置) b 慣性傳感單元的固定 c 站姿校準 d 坐姿校準
由于4個慣性傳感器各有其自身坐標系,需要將慣性傳感器與志愿者的肢體坐標系統一。固定好4個慣性傳感器后,要求志愿者先站立位,其后放置一把靠背椅,志愿者執行從站立位到坐下這一連貫動作。要求站立到坐下過程中志愿者右腿保持膝關節伸直狀態,并且無內收與外展,必要時研究者輔助志愿者完成動作。以上從站立位到坐下動作完成兩次,采集到兩組數據。動作如圖1c~1d所示。
1.2.2 下肢力線的測量 在志愿者的姿勢要求上,分為站立位以及仰臥位兩種姿勢,這兩種方式的肢體穩定性不同,其中站立位時志愿者的下肢運動為志愿者自主運動,仰臥位時由研究者輔助志愿者完成動作,為被動運動。分別在志愿者下肢處于站立位矢狀面、站立位冠狀面、站立位環轉運動、仰臥位矢狀面以及仰臥位冠狀面5種運動狀態時測量下肢髖-膝-踝角度(hip-knee-ankle angle,HKA)、機械軸偏向(mechanical axis deviation,MAD)、機械軸股骨遠端外側角(mechanical lateral distal femur angle,mLDFA)及脛骨近端內側角(medial proximal tibia angle,MPTA)數值。如前所示佩戴慣性傳感器,完成一個運動姿勢視為一組,每個姿勢連續采集三組數據。
站立位時,志愿者在研究者協助下分別在膝關節和踝關節內外兩側佩戴1、2、3、4號慣性傳感器,采取左腿站立位,右腿稍抬起,站立于身體左側靠近墻面位置,在下肢運動過程中研究者協助志愿者保持平衡及下肢運動平面的穩定。在志愿者站立位時,一側下肢可以在矢狀面、冠狀面內運動,也可在三維空間中進行環轉運動。整個動作過程中盡量保持志愿者骨盆固定,以減小誤差。
仰臥位時,志愿者在研究者協助下分別在膝關節和踝關節內外兩側佩戴1、2、3、4號慣性傳感器,仰臥于硬板床上,右下肢被動運動,在下肢運動過程中研究者協助志愿者保持下肢運動平面的穩定。由于仰臥位時志愿者下肢無法做環轉運動,因此在這個姿勢下只有矢狀面及冠狀面內的運動。
1.2.3 計算目標值 通過慣性傳感單元在站立位和仰臥位采集到志愿者的下肢運動數據,將初始加速度、角速度以及角加速度數據導入MATLAB軟件(2016版,美國,MathWorks公司)。根據預先建立的在二維平面中的下肢力線以及角度和距離參數的算法,運用MATLAB生成志愿者在冠狀面內的HKA、MAD、mLDFA以及MPTA。
1.2.4 雙下肢全長片的拍攝與測量 志愿者于西安交通大學第二附屬醫院醫學影像科進行負重位雙下肢全長X線片的拍攝,拍攝前志愿者簽署知情同意書。使用了DR數字X線攝影系統。使用INFINITT PACS(3.0.11.3BN3版)軟件在計算機上分析志愿者負重位雙下肢全長X線片,標記出下肢股骨頭中心點、膝關節中心點及踝關節中心點,標出下肢力線以及HKA、MAD、mLDFA以及MPTA并測量以上各參數值。選擇3名骨科臨床醫師在INFINITT PACS軟件上對志愿者的負重位雙下肢全長X線片進行以上標記及測量冠狀面內的HKA、MAD、mLDFA以及MPTA。
2 結 果
2.1 便攜式下肢力線測量裝置結果 根據實驗步驟,在志愿者站立位和仰臥位,通過基于慣性傳感單元的便攜式下肢力線測量裝置分別在5種運動姿勢下獲取志愿者右下肢的運動數據,再由Matlab軟件(2016版,美國,MathWorks公司)生成志愿者在冠狀面內下肢分別處于站立位矢狀面、站立位冠狀面、站立位環轉運動、仰臥位矢狀面以及仰臥位冠狀面5種運動狀態時測量得到HKA、MAD、mLDFA以及MPTA數值,通過SPSS軟件計算得出在以上5種運動姿勢下的HKA、MAD、mLDFA以及MPTA的均數與標準差。
2.2 下肢全長片的測量結果 選擇3名骨科臨床醫師對雙下肢全長X線片上的各參數進行測量與分析,表2為志愿者的雙下肢全長X線片上測量得到的下肢力線及角度數據。

表2 志愿者雙下肢全長X線片的測量結果
表3為15名志愿者通過便攜式下肢力線測量裝置獲得的各組數據與雙下肢全長片獲得各組數據之間的差異分析結果,顯示在志愿者處于仰臥位下肢矢狀面內前屈運動時測得的HKA,MAD,mLDFA和MPTA值與雙下肢全長片上測量的值差異無統計學意義(P>0.05);而在站立位矢狀面、站立位冠狀面、站立位環轉運動和仰臥位冠狀面測得的HKA、MAD、mLDFA和MPTA數值和雙下肢全長片相比差異有統計學意義(P<0.05)。
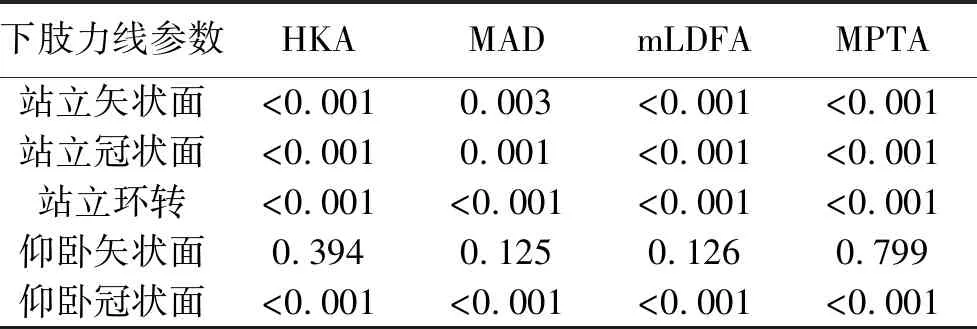
表3 5名志愿者慣性傳感器測量數據與下肢全長片的P值情況比較
為進一步評估便攜式下肢力線測量裝置在仰臥矢狀面獲得各組數據的可靠性,進一步采用MedCalc軟件對便攜式下肢力線測量裝置仰臥矢狀面和下肢全長片獲得的數據進行一致性分析。圖2為15名志愿者采用便攜式下肢力線測量裝置在仰臥位下肢矢狀面與雙下肢全長片間一致性的Bland-Altman圖,藍線表示兩組間HKA、MAD、mLDFA、MPTA差值的平均值,黃線表示差值為0,15個組間差值基本平均分布于黃線兩側,使用MedCalc軟件對兩組數據進行分析,慣性傳感器在仰臥位下肢矢狀面以及雙下肢X線全長片的測量結果之間一致性較好。
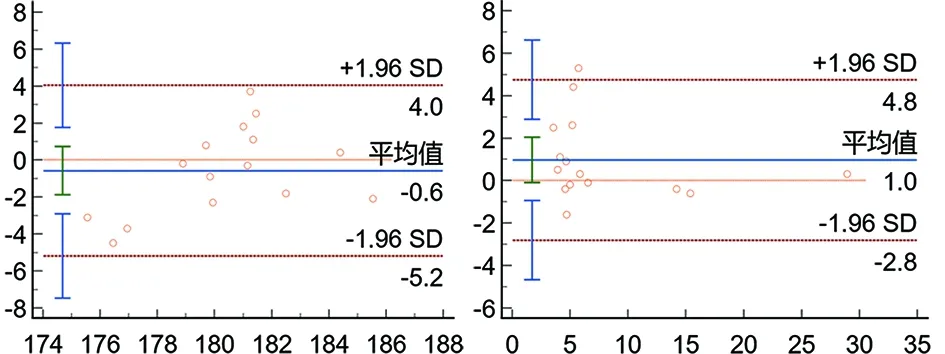
a HKA比較 b MAD比較
3 討 論
本研究中,使用基于慣性傳感單元的便攜式下肢力線角度測量裝置,佩戴于志愿者下肢特定位置,并使其作特定運動,測出下肢運動的加速度、角速度和角加速度,經過軟件計算得到志愿者下肢的HKA、MAD、mLDFA、MPTA的數值,并同時計算了志愿者在雙下肢全長X線片上測量出的下肢力線參數,比較兩種方法得到的數值。結果顯示在志愿者下肢仰臥位矢狀面運動時測得的HKA、MAD、mLDFA、MPTA數值與雙下肢全長片上測量的值相比,差異無統計學意義(P>0.05),并且通過一致性分析可見仰臥位矢狀面與站立位全長片兩組數據之間得一致性較好;在站立位矢狀面、站立位冠狀面、站立位環轉運動和仰臥位冠狀面測得的HKA、MAD、mLDFA、MPTA數值和雙下肢全長片相比,差異均有統計學意義(P<0.05)。以上結果表明使用下肢力線測量裝置在仰臥位矢狀面上測量的HKA,MAD,mLDFA和MPTA結果較準確,與雙下肢全長片無明顯差異且一致性良好,支持仰臥位矢狀面作為臨床上使用慣性傳感單元測量下肢力線的姿勢;在站立位矢狀面、站立位冠狀面、站立位環轉運動和仰臥位冠狀面測得的HKA、MAD、mLDFA、MPTA數值均不準確,與雙下肢全長片差異較大,不能作為臨床上使用慣性傳感單元測量下肢力線的姿勢。
本研究中采取站立與仰臥兩種姿勢主要是基于以下方面的考慮。首先,本研究是以利用慣性傳感單元測量人體下肢力線各參數這個目的為出發點,在前期選擇合適的下肢關節中心點定位方法、設計下肢力線測量裝置以及建立下肢力線參數的計算模型等過程中都要充分考慮慣性傳感器的運行特點,采集數據需要在志愿者下肢運動的狀態下完成,基于以上要求,選擇了站立姿勢作為測量姿勢之一。另外,為了滿足減少志愿者骨盆移動的要求,也需要采用仰臥姿勢,在此狀態下志愿者的肢體更易于保持固定。
研究中所用到的慣性傳感器在測量過程中,除了自身隨著被測量物體運動外,被測量物之間的移動越少,其測量誤差越小,精度越高[14,26]。站立位時,下肢運動時肢體更容易產生晃動,造成志愿者骨盆不穩,運動中心(即股骨頭中心)產生移動,使得測量的加速度數據等誤差變大,最終測得的各項參數偏差較大[27]。而在仰臥位,由于硬板床或地面一側的固定,下肢運動時產生的晃動減小,骨盆相對固定,所測得的數據較站立位偏差更小。同時慣性傳感器在被測量物體運動狀態更單一時,其所測得的數據更精確[14,18]。志愿者在做下肢環轉運動時,運動的相對復雜性使得肢體產生更多的不穩定,慣性傳感器和下肢之間的相對移動更大,因此在矢狀面或冠狀面等單一二維平面內運動時,慣性傳感器測得的下肢力線參數相較于三維空間的環轉運動更穩定。
而在相對更穩定的仰臥位測量姿勢,差異來源于在志愿者仰臥時下肢髖關節屈曲和外展時的不同。仰臥位外展時由于存在被測量的一側臀部上抬,導致下肢外展時的實際運動平面與冠狀面之間產生了夾角,其穩定性差于仰臥位矢狀面運動,同時下肢靠近地面或床面的運動較難保持其肢體穩定,產生了被測下肢的上下晃動,因此測出的下肢力線參數偏差較大。
在站立位與仰臥位兩種姿勢下,志愿者采取不同體位運動狀態對于慣性傳感單元測量過程的影響不同[28]。在站立位矢狀面和站立位冠狀面下肢運動時測出的MAD值仍在正常范圍,但與下肢全長片相比差異具有統計學意義,這可能是由于佩戴慣性傳感器測量時的下肢非負重位與雙下肢全長片的負重位的差異導致。本研究中所建立的下肢力線計算模型,由于在計算過程中MAD需要用到的慣性傳感器運動數據較少,HKA、mLDFA和MPTA等角度需要用到的慣性傳感器運動數據較多,因此角度的測量更易受到肢體姿勢偏移、傳感器固定不穩所產生誤差的影響[29],故而在站立位矢狀面、站立位冠狀面下肢運動時,得到的MAD數值與志愿者在雙下肢全長X線片上測得的MAD值相差不大,而角度差異較大。
人體下肢在站立位受到自身重力的影響,使得下肢各關節受力情況與非負重位有所不同[5,30-33]。在雙下肢全長片上可以觀察到膝關節間隙的寬度(joint space width,JSW),由于重力的影響,使得JSW在非負重位(仰臥位)時的X線測量值大于負重位。目前臨床上常用的負重位下肢力線檢測方法有雙下肢全長負重位X線片以及錐形束計算機斷層掃描兩種[30],它們分別是被檢查者在站立位時接受X線的掃描得到的二維或三維[4]檢查圖像。臨床上人體自然負重位以及人工模擬負重位,均相當于是人體保持靜止的姿勢,用其測得的下肢力線可以看作人體在某種靜止狀態時的下肢力線及下肢力線參數。而下肢力線測量裝置由于其具有慣性傳感器的測量特性,需要在被測量下肢運動過程中來測量數據,因此利用慣性傳感單元測出的數據可以看作是特定運動狀態下的下肢力線參數。
本研究具有以下優勢:(1)具有慣性傳感器的準確、便攜、非侵入等優點;(2)相較于傳統下肢力線測量方法,無X線照射,減少了對患者和醫師的潛在傷害;(3)基于慣性傳感單元的便攜式下肢力線測量裝置對于下肢力線的測量不局限于術前,在HTO等需要監測術中下肢力線矯正情況的手術以及術后測量下肢力線均可應用;(4)測量過程簡單,患者依從性高,擁有測量人體運動過程中下肢力線的潛力,因此具有廣泛的臨床應用前景,通過優化未來可運用于臨床HTO等手術中下肢力線的監測。本研究的內容中存在一些不足之處,主要在以下幾個方面:(1)本研究僅探討了正常人在二維冠狀面內的下肢力線,為了獲得人體實際的下肢力線情況來指導膝骨關節炎的治療,以三維空間中的下肢力線為參考進行矯正較冠狀面內更加準確;(2)本研究數據測量部分僅基于健康成年人進行了下肢力線參數的評估,沒有對膝骨關節炎患者進行下肢力線的測量,因此研究結果僅能說明在正常人群中該裝置的準確性;(3)本研究中基于慣性傳感單元的便攜式下肢力線測量裝置僅能得出被測量者在非負重位時的下肢力線情況,而對于負重位的下肢力線則不能以此方法獲得,導致在分析膝關節情況時可能會因負重與非負重的不同而出現差異;(4)本研究中慣性傳感器的固定方法是通過固定卡扣以彈力帶纏繞固定于下肢,這就導致慣性傳感單元與人體間的位置關系存在潛在的相對不穩定,在志愿者下肢運動過程中,會產生下肢與慣性傳感器間的相對位移而引入誤差,導致測量結果出現偏差。
綜上所述,基于慣性傳感單元的便攜式下肢力線測量裝置在被測試者處于仰臥位并在矢狀面內行髖關節屈曲運動時,可以替代下肢全長片來測量正常人的HKA、MAD、mLDFA及MPTA。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00