基于改進的模型參考自適應的飛行控制律設計
2022-10-27 08:35:26鄔正堃屈曉瑜
科學技術創新 2022年31期
鄔正堃,屈曉瑜
(中國航天科工集團第六研究院二一〇所,陜西西安 710018)
引言
提高飛行控制器的魯棒性是科研工作者們一直追求的目標。基于常規的比例積分微分(proportion integration differentiation,PID)控制算法設計的飛行控制算法雖然理論簡單易實現,并且魯棒性比較好,但PID 控制方法結構和參數固定,因而在復雜的飛行環境下,可能無法保證飛機達到期望的動態性能,進而降低飛行器的飛行品質。
隨著現代控制的發展,自適應控制的提出和發展對提高飛行控制系統在復雜環境下的魯棒性有著很大的幫助。文獻[1]將模型參考自適應控制與BP 神經網絡結合,設計了航天器的姿態控制器,實現了航天器攻角的自適應控制。文獻[2]基于模型參考自適應控制設計了四旋翼的姿態容錯控制,實現了四旋翼在擾動存在和執行機構故障下的姿態角跟蹤。此外,文獻[3]開展了基于模型參考自適應的直升機懸停控制,實現了直升機姿態的滿意控制。除此之外,模型參考自適應控制還被應用于柴油機轉速控制[4]、導彈控制[5]以及大側滑角飛行控制[6]等場景中。
飛行控制具有飛行包線范圍大、擾動復雜等特點。考慮到常規模型參考自適應控制本質是仍是線性控制器,因而在飛行狀態大范圍初值變化情況下會出現性能降級的問題。鑒于此,本研究對常規模型參考自適應控制進行了改進,以拓寬其適用性。并且在初始飛行狀態變化和參數拉偏擾動下對基于改進模型參考自適應飛行控制律的魯棒性和控制性能進行驗證。
1 模型分析和相關假設
在擾動影響下,被控對象的非線性微分方程可寫為

為了后續研究,這里對系統做出以下幾個必要的假設:
假設1(維數假設):系統是完全驅動系統,并且系統的輸出量為狀態量,即n=m=l。
假設2(可控性假設):系統的控制矩陣G(x)的逆存在。

假設5(系統控制效能矩陣部分已知):系統的控制效能矩陣假設為符號已知的對角矩陣。
2 基于改進的模型參考自適應控制
從結構上來看,傳統模型參考自適應控制由被控對象、參考模型、自適應律以及控制律四個部分組成。其中,參考模型作為系統的參照,具有被控對象期望的動態;自適應律則是根據被控對象和參考模型之間的誤差估計出擾動參數,控制律則是根據估計出的擾動來消除被控對象的擾動影響,最終保證被控對象的響應跟蹤上參考模型動態。
但從形式上來看,傳統參考模型實質上仍是線性控制器。從飛行控制角度來看,傳統模型參考自適應控制器具有以下幾個缺陷:
(1) 單個控制器適用范圍有限,在初始狀態變化較大的情況下會出現控制性能降級;
(2) 在整個包線內,傳統模型參考自適應控制器需要設計多個參考模型,因此,該控制器的通用性不足。
為了消除上述模型參考自適應控制器中的不足,本文借鑒文獻[7],對基于參考模型的自適應控制進行改進。改進后的參考模型自適應控制器的結構不變,具體設計如下控制律設計為


在自適應律中,Γ 表示自適應增益,這與系統擾動估計速率相關,Γ 越大,自適應律估計速率越快;相反,Γ 越小,自適應律估計速率越小。過高的 Γ容易導致系統振蕩,因此實際選擇增益的過程中應兼顧系統的快速性和瞬態性能。
從控制律(3)和參考模型(4)的形式來看,改進后的模型參考自適應控制系統是非線性的,與系統的動態和控制矩陣有關。單個控制器適用于整個飛行包線內,并且控制器參數較少,通用性強,很好地彌補了常規模型參考自適應控制的缺陷。
3 穩定性分析
本小節在Lyapunov 穩定性要求下,證明了改進后的模型參考自適應控制器對擾動的魯棒性。
選取Lyapunov 函數

結合狀態誤差、自適應估計誤差的定義,上式可進一步寫成

4 飛行控制律設計
以典型三翼面飛機為研究對象,飛機的操縱舵面包括左右升降舵(δel,δer)、左右副翼(δal,δar)和方向舵( δr)。
根據牛頓第二定律,飛機所受的力矩可以建模成以下形式

其中

根據第2 節中參考模型(4),自適應律(5)和控制器(3),可以設計出基于改進的模型參考自適應的飛行控制律。控制器中參數選取如下

5 仿真驗證
本小節主要對所設計的基于改進的模型參考自適應飛行控制律進行驗證。
為了突出控制效果,選取常規模型參考自適應控制作為對照組。在高度2 000 m,速度100 m/s 的平飛狀態下設計模型參考飛行控制律。
在高度5 000m,速度150 m/s 的平飛狀態下對比以上兩種控制方法。給飛機俯仰和滾轉角度階躍指令,期間偏航角速度保持為零。12 s 時飛機靜穩定導數突變20%,對比結果,見圖1~圖6。

圖1 滾轉角速度對比圖
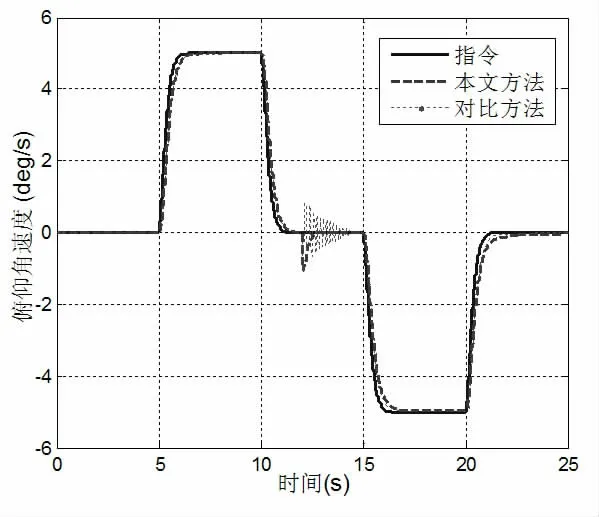
圖2 俯仰角速度對比圖

圖3 偏航角速度對比圖

圖4 升降舵對比圖

圖5 副翼對比圖

圖6 方向舵對比圖
從對比結果能夠看出,基于改進的模型參考自適應飛行控制律動態和穩態性能都優于傳統模型參考自適應控制,并且在參數拉偏的干擾下能夠保證飛控系統的性能不降級,角速度并未出現震蕩,依舊實現期望動態。因此,本研究提出的方法適用范圍較傳統模型參考自適應控制有明顯提升。
6 結論
本研究提出一種基于模型參考自適應控制方法,并應用于飛行控制律設計。改進后的模型參考自適應控制克服了傳統模型參考自適應控制因初始狀態變化導致的性能降級問題。因而,適用范圍更大。并且改進后的方法設計的流程更加簡單。數字對比仿真驗證了理論分析。結果表明基于本研究提出方法設計的飛行控制律能夠克服參數拉偏干擾,并且能夠保證飛機動態性能和穩定性達到預期。本研究對提高飛行控制律魯棒性做出了一定貢獻。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
