面切割結合k-means聚類的測點自識別隧道監測方法
2022-10-27 10:25:32鄭榮政吳勇生蘇哿張浩楊承昆
鐵路技術創新 2022年3期
關鍵詞:全站儀
鄭榮政,吳勇生,蘇哿,張浩,楊承昆
(1.中國鐵路設計集團有限公司 土建工程設計研究院,天津 300308;2.湖南聯智科技股份有限公司,湖南 長沙 410200)
1 概述
隧道施工期間,由于周圍地質情況復雜且施工過程中巖土力學行為的不斷變化等原因,會對隧道產生綜合影響從而使隧道產生變形,因此,隧道監控量測是隧道施工安全控制的重要環節[1-3]。隧道變形是其內部力學行為變化的最直觀外部反映之一[4],傳統方法采用鋼尺接觸量測和全站儀非接觸量測方式以及多功能激光斷面儀等進行變形量測,鋼尺量測受人為影響較大,具有明顯的局限性且精度難以保證[5],目前國內外廣泛使用的全站儀[6]、激光斷面儀量測方法作業效率較低、工作量較大[7]。
Moser等[8]嘗試在結構內部提供數百個應變和溫度傳感點,并提供有關隧道襯砌行為的全新信息,但成本高昂,無法普遍應用。也有學者使用攝影測量方法進行隧道變形監測[6],雖成本較低但精度難以保證,無法獲得較為可靠的監測結果[9]。隨著三維激光掃描技術的發展,嘗試將該技術引入隧道監控量測工作中[10]。趙寧寧等[11-13]通過對獲取的隧道點云數據進行切片處理從而對隧道收斂情況進行分析;杜黎明等[14-15]利用移動式三維激光掃描技術獲取絕對坐標系下的隧道點云數據,從而直接根據坐標值提取斷面,該斷面提取方法較為簡單,但移動式三維激光掃描精度較低,無法用于監控量測;孫澤會等[16-17]通過對隧道橫斷面點云進行橢圓擬合,利用擬合得到的橢圓參數進行斷面長、短半軸形變分析;李勇兵等[18]通過對點云進行三角網化,將離散點云轉化為點云三角網模型,再通過多期監測數據對比或與設計模型對比進行多斷面監控量測;Menéndez-Díaz等[19]通過軟件自動化或半自動化識別點云中關鍵區域的變形趨勢進行隧道全面監測,該方法具有創新性但不符合我國現有技術規程。
以上三維激光掃描隧道監控量測方法均是將相鄰兩期斷面點云進行對比分析,隧道監測點的變形軌跡并不確定,隧道內巖體常常發生偏壓或整體沉降,此類方法設定的監控量測控制點在2次監控量測數據中已經不是真正意義上的相同參照物,其監控量測結果無法滿足現有規范要求。可見,現有基于三維激光掃描斷面的監控量測方法所設定的監測點與實際監測點有較大位差。吳超等[20]通過手動提取標靶點云后進行標靶中心坐標的自動識別,但需人工選取標靶點云所在位置,并不能實現完全自動化識別。
為解決上述問題,兼顧傳統測量方法和三維激光掃描技術優點,以自制三維激光掃描標靶作為監測點進行監控量測,結合施工隧道特點切割隧道點云平面,獲得平面標靶點云,并結合文獻[20]中基于k-means聚類的平面標靶自識別方法,提出面切割結合k-means聚類的測點自識別隧道監控量測方法(簡稱結合量測法),并設計了全站儀與三維激光掃描儀2種儀器,同時進行隧道監控量測標靶識別的精度對比試驗,驗證結合量測法進行隧道監控量測的可行性。
2 基于平面切割和k-means聚類的監測標靶自識別
通過平面切割方法自動獲取平面標靶點云,再通過k-means聚類方法自動識別平面標靶坐標,完成監測點平面標靶的自識別。
2.1 基于平面切割的平面標靶點云自動獲取
根據三維激光掃描的特點,設計一種基于平面切割的平面標靶點云自動獲取方法。為保證標靶點云數量和質量,掃描平面標靶時采用區域精掃模式,選取的掃描區域略大于標靶所在區域,隧道監測平面標靶掃描點云示意見圖1。
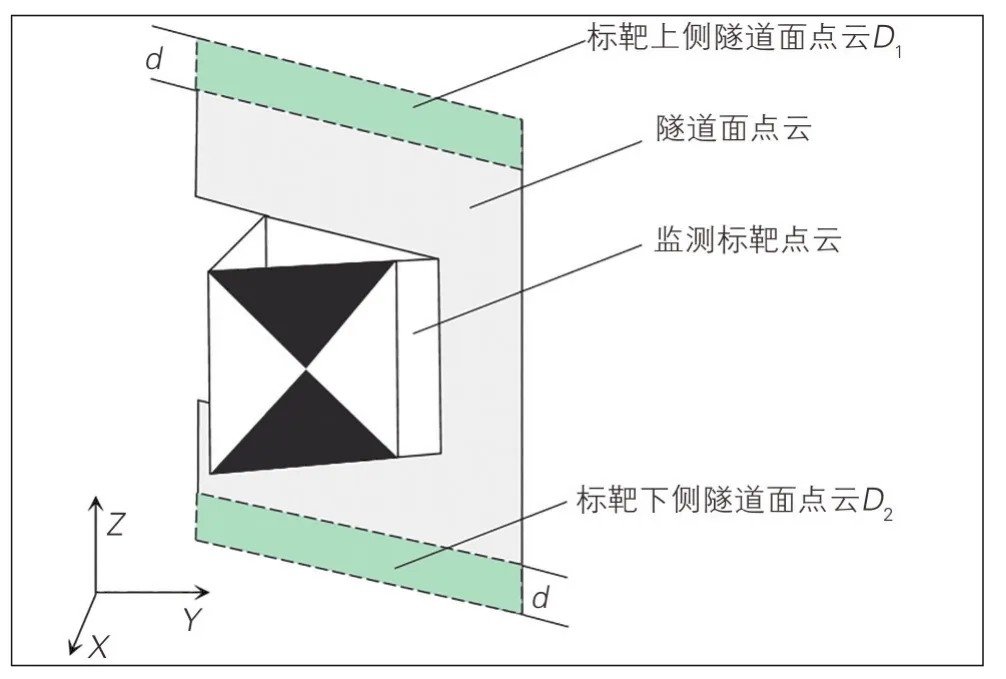
圖1 隧道監測平面標靶掃描點云示意圖
黑白標靶布設于隧道面上,標靶上、下側分別有較多隧道面點云。設該區域點云高程最大值為Zmax、最小值為Zmin,標靶點云高程最大值為Zt-max、最小值為Zt-min,設距離閾值d(d<Zmax-Zt-max∧d<Zmin-Zt-min),分別取高程大于Zmax-d的點云D1和高程小于Zmin+d點云D2。同理當標靶位于拱頂時,獲取水平方向的隧道面點云。
已知平面E:

式中:A、B、C、D分別為平面參數;x,y,z分別為平面內點坐標。根據文獻[21]內平面擬合方法擬合得到[D1,D2]所在重心平面參數A、B、C、D。
設向量:k(A,B,C),k為常數系數,即垂直于E。令,d′為平面標靶正面圖案距離隧道面的最短距離,從E開始,分別以平行于E法向量方向平移向量和-向量的平面E1和E2,得到E1與E2間的點云切割區域,其相應關系示意見圖2。
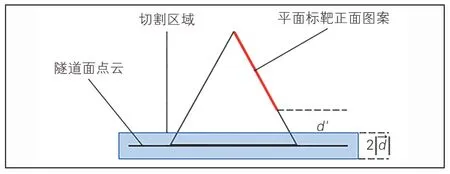
圖2 切割平面與平面標靶幾何關系示意圖
如圖2所示,藍色框為點云切割區域,設點p(x,y,z)到平面E的距離絕對值為d,則:


2.2 基于反射強度和k-means聚類的標靶自識別
在獲取平面標靶點云后,根據點云數據的反射強度值予以分級,使各區域點云數目相當,實現點云數據的區域分割;最后通過k-means聚類方法自動獲取標靶中心坐標。
在對掃描數據分割為n個區域后,對每一區域的點云選取k個初始聚類中心進行k-means聚類,得到每一區域的k個聚類中心點si(s1,s2,s3,...,k),得到區域的中心點ˉ:

然后得到標靶中心點坐標pc:

3 監控量測對比試驗設計及結果分析
3.1 對比試驗設計
試驗采用高精度全站儀與三維激光掃描儀進行對比,全站儀使用徠卡TS50高精度全站儀,儀器測角精度為0.5″,掃描儀使用Z+F IMAGER 5010X型掃描儀,線型誤差為1 mm。采用一種自制三維激光掃描黑白格網監控標靶作為三維激光掃描儀和全站儀共同的測量標靶(見圖3),該標靶中心點清晰可辨,表面平整光滑,當反射面平整光滑時,全站儀免棱鏡測量精度較高,該標靶中心由全站儀免棱鏡模式進行精確測量[22-23],同時該標靶的點云通過結合量測法自動識別出中心坐標。

圖3 三維激光掃描儀與全站儀共用標靶
對比試驗隧道內每個斷面,共布設5個監控標靶,監控標靶位于拱頂和兩側拱腰位置(見圖4),分3個斷面分別布設,斷面間距為10 m,斷面預定里程分別為DK155+633、DK155+643、DK155+653。為方便表示,將3個斷面的拱頂點分別表示為A2、B2、C2,收斂點表示為A1—A3、B1—B3、C1—C3。
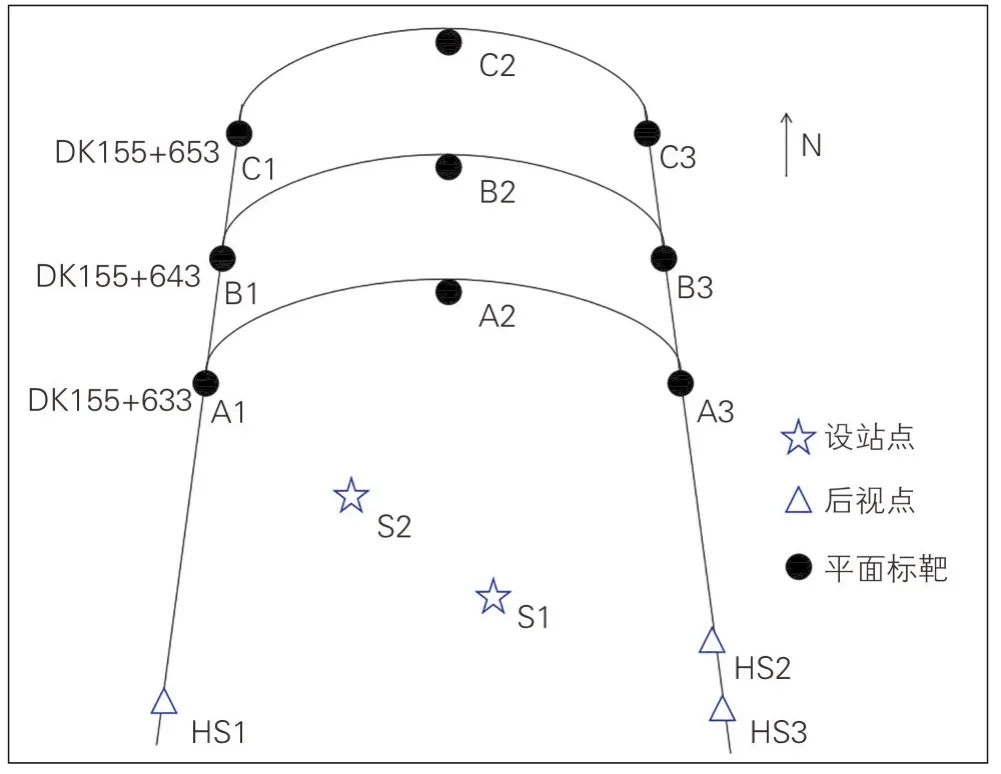
圖4 標靶布設斷面示意圖
參考文獻[24]優化現場儀器架設和標靶布設方案,并對其中3個標靶進行多次重復觀測。
在現場監控量測數據獲取完畢后,全站儀監控量測值由全站儀現場測量得到,掃描儀監控量測值分別由標靶自動識別和儀器自帶點云處理軟件識別方法進行識別得到。
設各次觀測值為Lm(m為觀測次數),觀測值均值為,各觀測值與均值的差值為m=lm-,因各觀測值相互獨立,觀測值權陣P為對角單位陣,為所有的矩陣表示,則各觀測值的內符合精度計算如下:

設全站儀坐標值為真值,則外符合精度計算如下:

3.2 試驗結果分析
采用結合量測法進行標靶中心坐標提取,并將坐標識別點標注在三維圖像上,標靶中心識別見圖5(圖中紅色十字)。

圖5 結合量測法標靶中心坐標提取
以全站儀測量數據為真值,由式(6)、式(7)計算得到內、外符合精度及其均值和標準差(見表1、表2)。
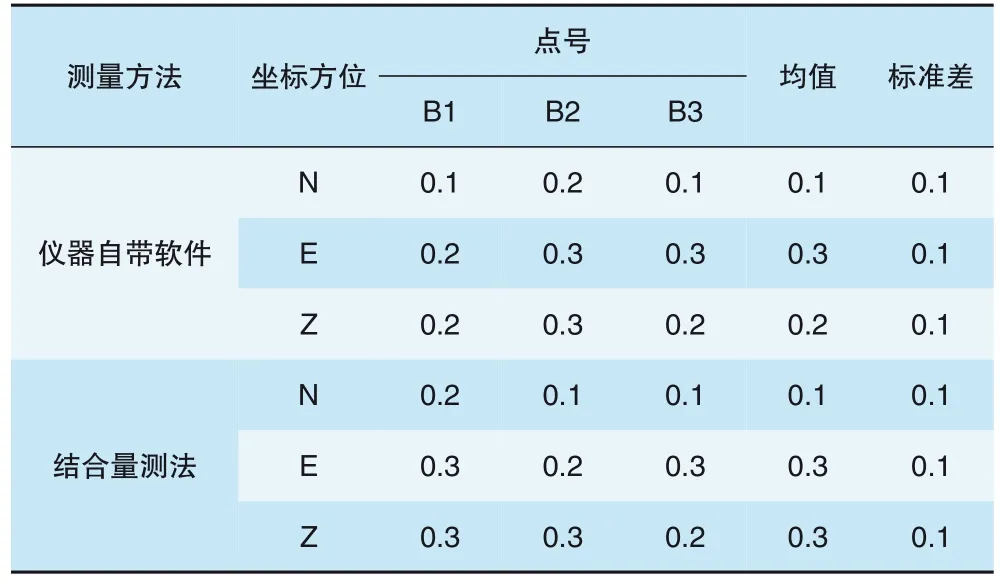
表1 內符合精度 mm
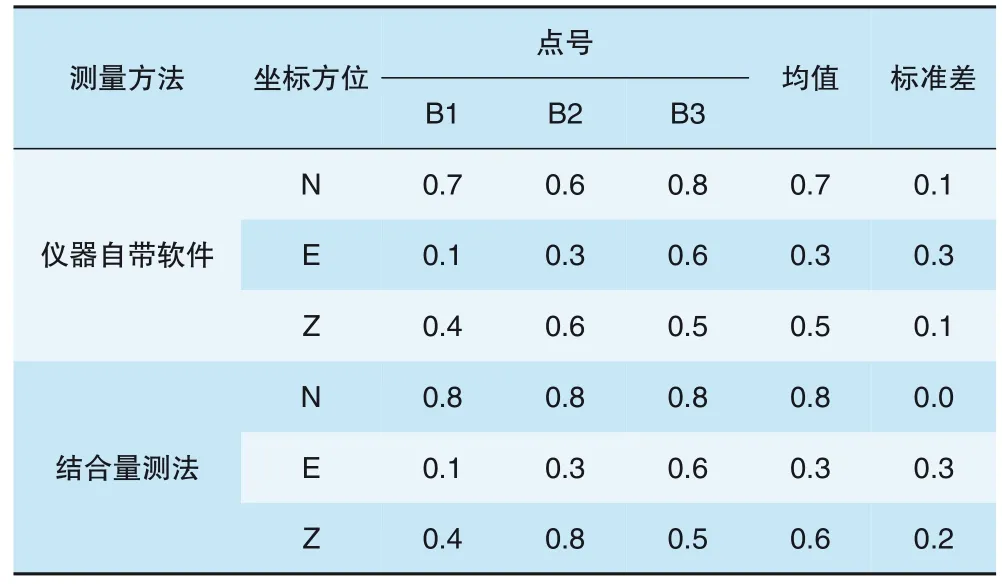
表2 外符合精度 mm
由表1、表2可知,儀器自帶軟件測量與結合量測法測量相比,內符合精度均值均在0.5 mm以內,且標準差均為0.1 mm;外符合精度均值均在1.0 mm以內,標準差均小于0.5 mm;儀器自帶軟件測量與結合量測法兩者的內、外符合精度差值約0.1 mm,精度相當。
2站監測點3種方法偏距測量差比較見圖6。為方便比較,對圖6數據求取均值和標準差(見表3)。
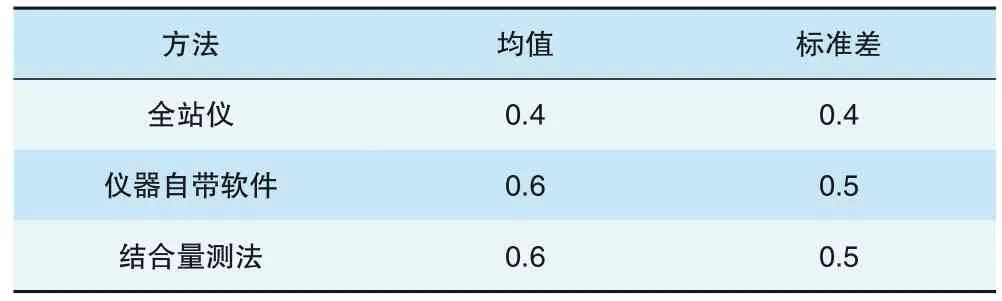
表3 2站監測點3種方法偏距測量差均值與標準差對比 mm
綜上所述,結合量測法測量精度與高精度全站儀測量精度相似,坐標測量內、外符合精度滿足鐵路隧道監控量測要求的1 mm精度。且結合量測法自動化程度高,作業人員在環境復雜的施工隧道內無需繁雜、精細操作,僅需在儀器中框選標靶大致位置進行掃描即可得到標靶坐標,大幅減少外業工作人員工作量,降低施工隧道內操作儀器的人為誤差可能性。
4 結論
根據監測對比分析得到如下結論:
(1)當使用自識別三維激光掃描標靶作為監控量測監控點時,結合量測法和儀器自帶軟件半自動識別監測精度相當,測量內符合精度均低于0.5 mm;
(2)根據隧道點云平面切割和k-means聚類方法,實現了三維激光掃描監測標靶中心坐標的自動識別,無需人為瞄準監測標靶中心進行測量,可進一步提升監測智能化水平;
(3)結合量測法測量外符合精度低于1.0 mm,滿足鐵路隧道監控量測要求的1 mm精度要求。
可見,使用隧道點云平面切割和k-means標靶自識別的隧道三維激光掃描自動監控量測方法,在保證與現有常規監控量測方法同等級監測精度的基礎上提升了監測自動化、智能化水平。在后續研究中,將進一步探究影響三維激光掃描監控量測精度的因素,優化監測方法。
猜你喜歡
經緯天地(2021年5期)2021-12-27 02:31:46
北京測繪(2020年12期)2020-12-29 01:37:18
礦產勘查(2020年1期)2020-12-28 00:21:36
水電站設計(2020年4期)2020-07-16 08:23:48
工程與建設(2019年3期)2019-10-10 01:40:18
鐵道標準設計(2018年12期)2018-11-22 12:26:38
電測與儀表(2016年9期)2016-04-12 00:29:52
鐵道勘察(2015年2期)2015-03-16 11:34:43
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
