基于MATLAB的牛頭刨床主切削機(jī)構(gòu)運(yùn)動(dòng)仿真
2022-10-28 04:26:38吳廣益于光忠
機(jī)械工程與自動(dòng)化 2022年5期
關(guān)鍵詞:動(dòng)畫
吳廣益,于光忠
(德州職業(yè)技術(shù)學(xué)院,山東 德州 253034)
0 引言
牛頭刨床是機(jī)械制造企業(yè)常用的金屬加工機(jī)床之一,主要用于平面和溝槽加工,其主切削運(yùn)動(dòng)機(jī)構(gòu)由擺動(dòng)導(dǎo)桿機(jī)構(gòu)和導(dǎo)桿滑塊機(jī)構(gòu)組成,各構(gòu)件運(yùn)動(dòng)過程中的位置、速度和加速度對刀具切削工件時(shí)的加工效率和平穩(wěn)性有著非常大的影響。本文采用矢量法構(gòu)建機(jī)構(gòu)獨(dú)立位置方程并對其進(jìn)行分析,借助MATLAB軟件計(jì)算出滑塊的線位移和各桿件的角位移,并最終得到牛頭刨床主運(yùn)動(dòng)機(jī)構(gòu)的動(dòng)畫,解決了利用力學(xué)分析和手工繪圖精度差、效率慢、不容易理解的問題。
1 位置分析和創(chuàng)建位置矢量方程
牛頭刨床主切削運(yùn)動(dòng)機(jī)構(gòu)的運(yùn)動(dòng)簡圖如圖1所示。
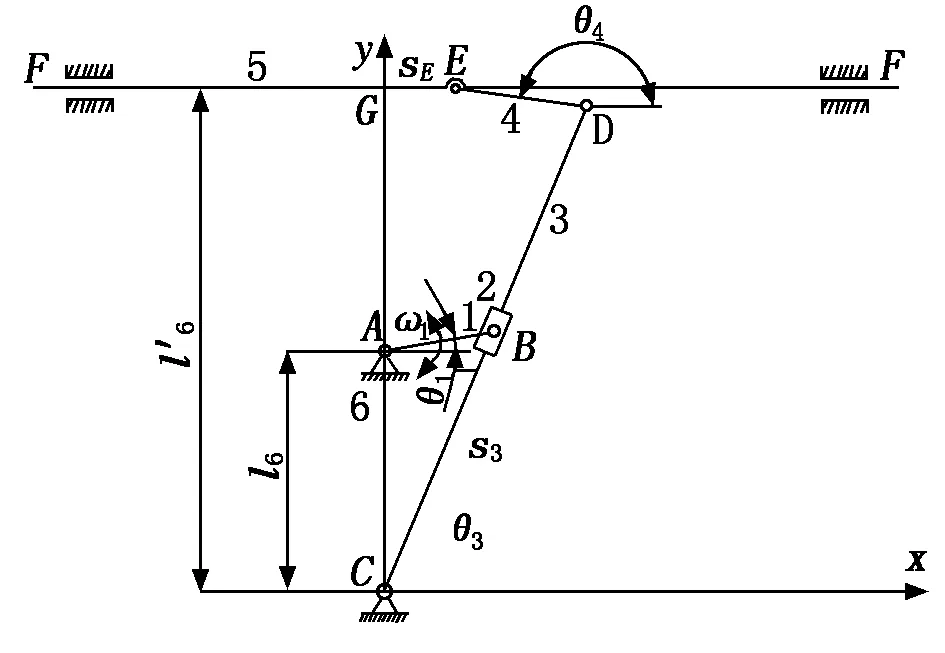
圖1 牛頭刨床主切削運(yùn)動(dòng)機(jī)構(gòu)運(yùn)動(dòng)簡圖
該機(jī)構(gòu)的輸入運(yùn)動(dòng)為構(gòu)件1以角速度ω1作勻速轉(zhuǎn)動(dòng),輸出運(yùn)動(dòng)有滑塊2的平面運(yùn)動(dòng)、導(dǎo)桿3的擺動(dòng)、連桿4的平面運(yùn)動(dòng)和桿件5的移動(dòng)。為了對該機(jī)構(gòu)進(jìn)行運(yùn)動(dòng)分析,需要在圖1所示的直角坐標(biāo)系中將各構(gòu)件表示為桿矢,并將每個(gè)矢量向x和y軸方向做投影得出運(yùn)動(dòng)方程[1,2]。
首先由桿矢CA(桿長為l6)、桿矢AB(桿長為l1)和桿矢CB(桿長為s3)畫出如圖2所示的封閉矢量三角形,列出其矢量方程:
l6+l1=s3.
(1)
將式(1)向x和y軸作投影可得:
(2)
解方程得:
(3)
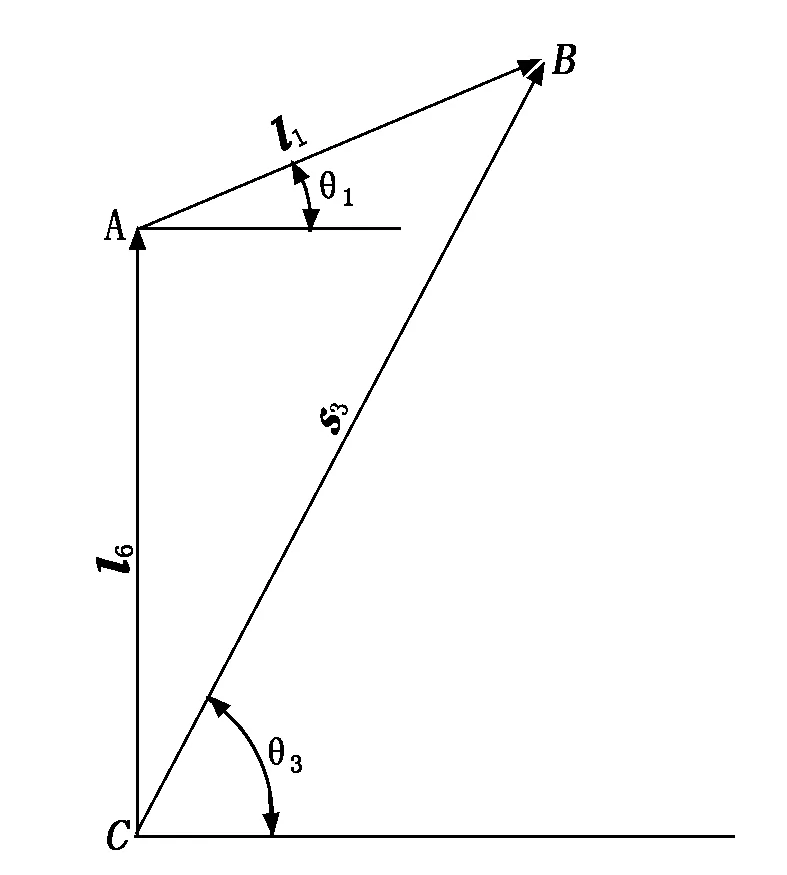
圖2 CABC矢量封閉圖形

(4)
將式(4)向x和y軸作投影:
(5)
解方程得:
(6)
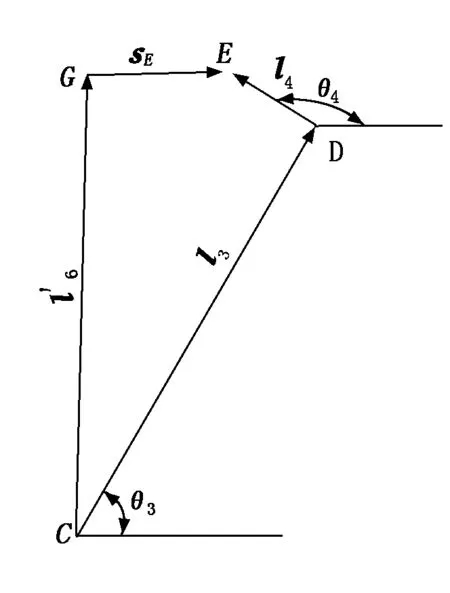
圖3 CDEGC矢量封閉圖形
2 編寫MATLAB程序
2.1 編寫主程序ntbc1.m
%1.輸入已知數(shù)據(jù)
clear;
l1=0.110;
l3=0.535;
l4=0.134;
l6=0.380;
l61=0.524;
omega1=1;
hd=pi/180;
du=180/pi;
2.2 編寫計(jì)算牛頭刨床主切削運(yùn)動(dòng)機(jī)構(gòu)中構(gòu)件的線位移(或角位移)程序ntbc2.m(需調(diào)用子程序ntbc4.m)
%2.調(diào)用子函數(shù)ntbc4計(jì)算牛頭刨床主切削運(yùn)動(dòng)機(jī)構(gòu)的位移(或角位移)
for n1=1:459
theta1(n1)=-2*pi+5.8119+(n1-1)*hd;
ll=[l1,l3,l4,l6,l61];
[theta]=ntbc4(theta1(n1),ll);
s3(n1)=theta(1); %s3表示滑塊2相對于導(dǎo)桿CD的線位移
theta3(n1)=theta(2);%theta3表示導(dǎo)桿3的角位移
theta4(n1)=theta(3);%theta4表示連桿4的角位移
sE(n1)=theta(4); %sE表示桿5的線位移
end
2.3 編寫牛頭刨床主切削運(yùn)動(dòng)機(jī)構(gòu)的仿真程序ntbc3.m
%3.牛頭刨床主切削運(yùn)動(dòng)機(jī)構(gòu)仿真動(dòng)畫
figure(1);
m=moviein(20);
j=0;
for n1=1:5:360
j=j+1;
clf;
x(1)=0;y(1)=0;
x(2)=(s3(n1)*1000-50)*cos(theta3(n1));
y(2)=(s3(n1)*1000-50)*sin(theta3(n1));
x(3)=0;y(3)=l6*1000;
x(4)=l1*1000*cos(theta1(n1));
y(4)=s3(n1)*1000*sin(theta3(n1));
x(5)=(s3(n1)*1000+50)*cos(theta3(n1));
y(5)=(s3(n1)*1000+50)*sin(theta3(n1));
x(6)=l3*1000*cos(theta3(n1));
y(6)=l3*1000*sin(theta3(n1));
x(7)=l3*1000*cos(theta3(n1))+l4*1000*cos(theta4(n1));
y(7)=l3*1000*sin(theta3(n1))+l4*1000*sin(theta4(n1));
x(8)=l3*1000*cos(theta3(n1))+l4*1000*cos(theta4(n1))-900;
y(8)=l61*1000;
x(9)=l3*1000*cos(theta3(n1))+l4*1000*cos(theta4(n1))+600;
y(9)=l61*1000;
x(10)=(s3(n1)*1000-50)*cos(theta3(n1));
y(10)=(s3(n1)*1000-50)*sin(theta3(n1));
x(11)=x(10)+25*cos(pi/2-theta3(n1));
y(11)=y(10)-25*sin(pi/2-theta3(n1));
x(12)=x(11)+100*cos(theta3(n1));
y(12)=y(11)+100*sin(theta3(n1));
x(13)=x(12)-50*cos(pi/2-theta3(n1));
y(13)=y(12)+50*sin(pi/2-theta3(n1));
x(14)=x(10)-25*cos(pi/2-theta3(n1));
y(14)=y(10)+25*sin(pi/2-theta3(n1));
x(15)=x(10);
y(15)=y(10);
x(16)=0;
y(16)=0;
x(17)=0;
y(17)=l6*1000;
k=1:2;
plot(x(k),y(k));
hold on;
k=3:4;
plot(x(k),y(k));
hold on;
k=5:9;
plot(x(k),y(k));
hold on;
k=10:15;
plot(x(k),y(k));
hold on;
k=16:17;
plot(x(k),y(k));
hold on;
grid on;
axis ([-500 600 0 650]);
title('牛頭刨床主切削運(yùn)動(dòng)機(jī)構(gòu)');
grid on;
xlabel('mm');
ylabel('mm');
plot(x(1),y(1),'o');
plot(x(3),y(3),'o');
plot(x(4),y(4),'o');
plot(x(6),y(6),'o');
plot(x(7),y(7),'o');
hold on;
grid on;
xlabel('mm');
ylabel('mm');
axis([-400 600 0 650]);
m(j)=getframe;
end;
movie(m);
2.4 編寫子程序ntbc4.m
function[theta]=ntbc4(theta1,ll)[4]
l1=ll(1);
l3=ll(2);
l4=ll(3);
l6=ll(4);
l61=ll(5);
%4.計(jì)算線位移和角位移
s3=sqrt((l1*cos(theta1))*(l1*cos(theta1))+(l6+l1*sin(theta1))*(l6+l1*sin(theta1)));
theta3=acos((l1*cos(theta1))/s3);
theta4=pi-asin((l61-l3*sin(theta3))/l4);
sE=l3*cos(theta3)+l4*cos(theta4);
theta(1)=s3;
theta(2)=theta3;
theta(3)=theta4;
theta(4)=sE;
end
3 仿真
將編寫的各部分MATLAB程序錄入到MATLAB R2016b應(yīng)用程序中,編譯通過后執(zhí)行文件,最終得到牛頭刨床主切削運(yùn)動(dòng)機(jī)構(gòu)的仿真動(dòng)畫,仿真動(dòng)畫結(jié)束后的圖形如圖4所示。

圖4 牛頭刨床主切削運(yùn)動(dòng)機(jī)構(gòu)圖形
4 結(jié)束語
本文根據(jù)牛頭刨床主切削運(yùn)動(dòng)機(jī)構(gòu)的運(yùn)動(dòng)簡圖,運(yùn)用矢量解析法建立運(yùn)動(dòng)方程,并求解出滑塊2、構(gòu)件5的線位移和導(dǎo)桿3、連桿4的角位移,結(jié)合MATLAB編程對其進(jìn)行運(yùn)動(dòng)仿真,形象直觀地展現(xiàn)出各構(gòu)件的運(yùn)動(dòng)過程,為牛頭刨床主切削運(yùn)動(dòng)機(jī)構(gòu)的創(chuàng)新設(shè)計(jì)和運(yùn)動(dòng)分析奠定了基礎(chǔ)。
猜你喜歡
動(dòng)漫界·幼教365(大班)(2024年7期)2024-12-31 00:00:00
瘋狂英語·新讀寫(2022年3期)2022-11-22 09:51:45
小哥白尼(趣味科學(xué))(2021年12期)2021-03-16 05:40:38
小學(xué)科學(xué)(學(xué)生版)(2020年10期)2020-10-28 07:52:18
四川工商學(xué)院學(xué)術(shù)新視野(2020年2期)2020-08-13 03:18:30
文苑(2019年22期)2019-12-07 05:28:56
流行色(2019年7期)2019-09-27 09:33:28
新聞傳播(2018年3期)2018-05-30 07:01:39
小學(xué)生必讀(低年級版)(2017年5期)2017-08-12 03:47:07
學(xué)生天地(2016年9期)2016-05-17 05:45:06
