
一種上下料機器人的靜力學仿真與整機模態分析
2022-10-28 05:03:40楊鵬
機械工程與自動化 2022年5期
楊 鵬
(安徽理工大學 機械工程學院,安徽 淮南 232001)
0 引言
配備多軸機械手的工業機器人具有極高的自由度,可實現多種動作,因此這種工業機器人在制造業領域的應用范圍越來越廣泛[1,2]。
用于沖壓機床上下料的機器人可代替人工進行簡單重復的勞動,降低了潛在的生產風險,提高了生產自動化程度。姜振廷等[3]通過ANSYS軟件對六自由度機器人的整體進行了靜力學分析和模態特性研究,并對機械臂進行了優化;林義忠等[4]通過Pro/E與ADAMS軟件的聯合仿真,對六自由度焊接機器人的設計方案進行優化;馬睿等[5]通過對小型六自由度機器人的三維建模,運用ANSYS有限元分析軟件對機器人的關鍵部位進行靜力學仿真,驗證了機械臂的可靠性;陳祝權等[6]首先對設計完成的機械結構模型進行優化,然后對優化后的三維模型進行靜力學、運動學分析,驗證了設計的可靠性。
現有研究對上下料機器人工作時的力學性能和動態性能研究較少。本文以用于沖壓機床上下料的工業機器人為研究對象,根據機器人的機械結構、工作原理和使用要求,利用SolidWorks軟件構建機器人的三維模型,借助ANSYS軟件分析機械臂受力最大情況下的應力和位移,驗證了機器人結構的可靠性,并利用模態分析得到的機器人固有頻率,對機器人整機的動態特性進行評價。
1 上下料機器人三維模型的建立
1.1 上下料機器人的機械結構
上下料機器人安置于加工車床旁,機器人底座與地面固定,待夾取的加工件最大質量為10 kg。因為待加工工件質量較小,所以該機器人機械臂采用四自由度的關節結構,伺服電機驅動,控制精度高、運行穩定。
機器人主要由底座、底部電機、轉臺和機械臂主體組成。其中機械臂主體由大臂、大臂電機、小臂、小臂電機、末端翻轉電機和末端執行機構等構成。轉臺主要由底部電機驅動,轉臺上安裝大臂電機,大臂電機驅動大臂轉動,大臂末端安裝小臂電機,小臂由小臂電機驅動,小臂末端與末端執行機構連接。通過末端執行機構實現零件的夾取,通過底部電機、大臂電機、小臂電機的相互配合實現機械臂的運動,從而完成待加工工件的上下料過程。
1.2 上下料機器人主要參數
機械臂的大臂長度為900 mm,小臂長度為850 mm,最大伸長量為1 580 mm,各關節主要性能參數如表1所示。

表1 各關節主要性能參數 (°)
機器人的底座采用低合金高強度結構鋼16Mn,與普通的鋼材相比焊接性能良好、強度高。因為被分揀物體質量輕,機械臂強度需求較低,為減輕機械臂整體質量,機械臂的大臂、小臂和末端執行機構采用6061鋁合金,其加工性能優良,可降低加工成本。兩種材料的性能參數如表2所示。

表2 兩種材料的性能參數
1.3 上下料機器人三維模型建立
由于多自由度機器人的結構復雜,本文忽略掉機器人的內部線路、導線管等對計算結果影響不大的部分,對機械臂模型進行合理化簡,利用SolidWorks軟件建立機器人的三維模型,如圖1所示。
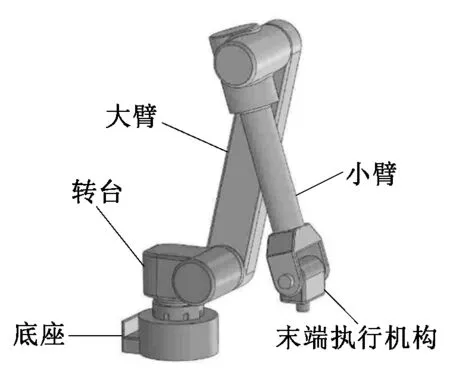
圖1 上下料機器人三維模型
2 機械臂靜力學仿真分析
2.1 機械臂受力分析
機械臂主體受到的力主要是自身的重力和抓取物體的重力,機械臂大臂與底部轉臺連接處受到的力矩M為:
M=M1+M2+M3.
其中:M1為大臂自身重力提供的轉矩;M2為小臂自身重力提供的轉矩;M3為末端執行機構和被夾取的加工件重力提供的轉矩。
分析發現,當機械臂伸到最大行程時,即大臂和小臂夾角最大為180°且機械臂大臂與小臂處于水平位置時,機械臂大臂與底部轉臺連接處受到的力矩M最大,即此時機械臂的受力狀態是最不利的,所受載荷如圖2所示。

圖2 機械臂受力最不利狀態
2.2 機械臂小臂靜力學仿真分析
利用ANSYS Worbench的靜力學模塊對小臂工作時最不利的受力狀態進行分析。將小臂的三維模型導入ANSYS Worbench模塊,設置機械臂小臂材料為6061鋁合金,輸入材料屬性。劃分網格時采用Mechanical物理參數,相關度設置為10。在小臂末端的夾取裝置上施加載荷100 N。通過靜力學分析得到小臂的應力云圖和位移云圖,如圖3、圖4所示。
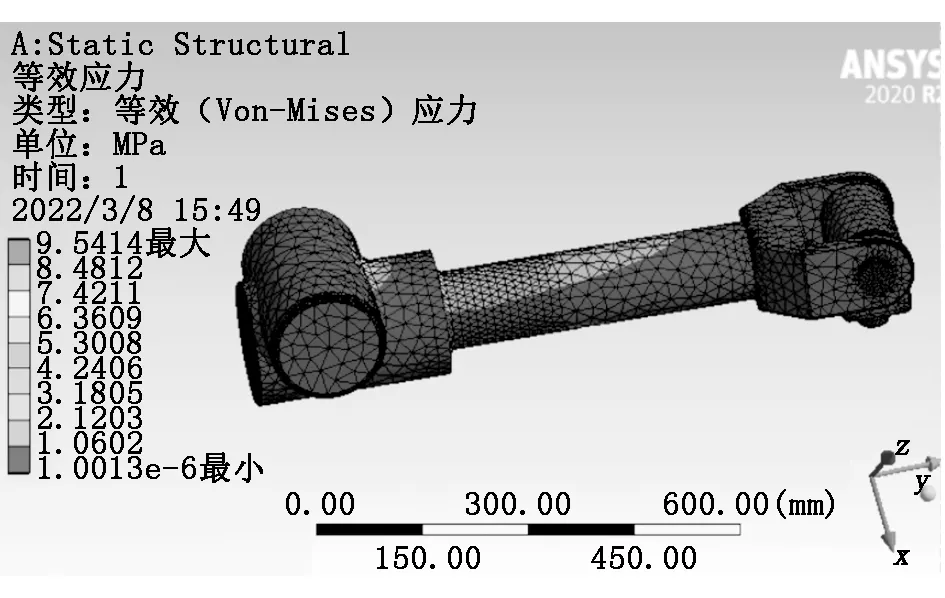
圖3 小臂應力云圖
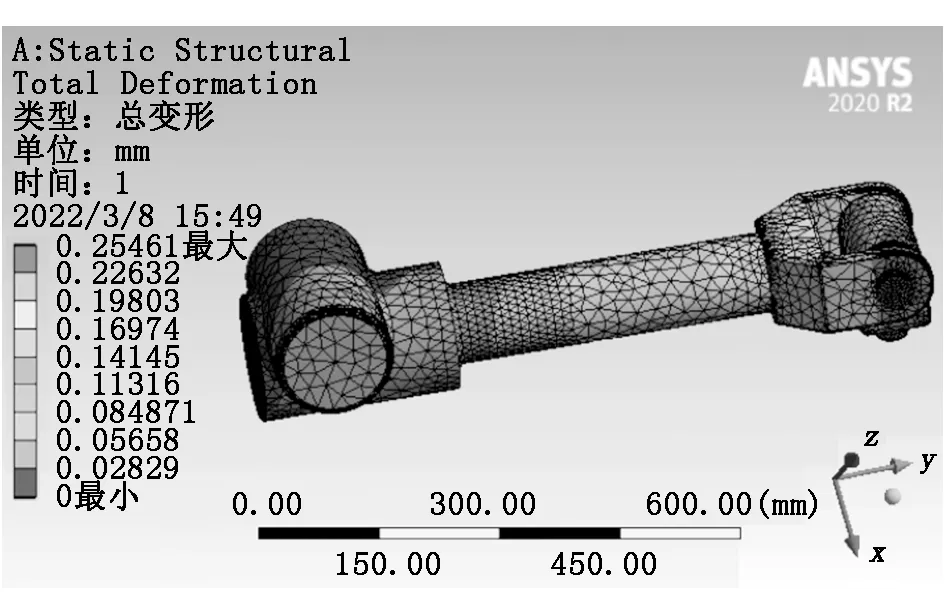
圖4 小臂位移云圖
由圖3可知,小臂的最大應力為9.54 MPa,位于小臂和大臂的連接處。小臂的最大應力小于材料6061鋁合金的抗拉強度,滿足要求。由圖4可知,小臂的最大位移為0.255 mm,位于小臂末端。
2.3 機械臂大臂靜力學仿真分析
同樣利用ANSYS Worbench的靜力學模塊對大臂工作時最不利的受力狀態進行分析。通過上述對小臂的靜力學分析得知,小臂和大臂的連接處產生的力矩和力分別為119 630 N·mm和232.43 N,在大臂與小臂的連接處施加相反的力和力矩。通過靜力學分析得到的大臂應力云圖和位移云圖如圖5、圖6所示。

圖5 大臂應力云圖
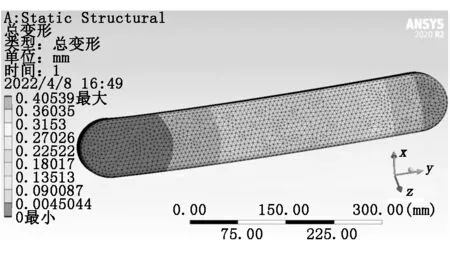
圖6 大臂位移云圖
由圖5可知,大臂的最大應力為16.99 MPa,位于大臂和旋轉底座的連接處。大臂的最大應力小于材料6061鋁合金的抗拉強度,滿足要求。由圖6可知,大臂的最大位移為0.41 mm,位于大臂末端。
3 整機模態分析
為比較全面地了解該機器人的整體模態情況,分別選取水平位姿(圖2所示姿態)、收攏狀態(如圖7所示)和豎直位姿(如圖8所示)三種典型姿態進行模態分析。
圖7 收攏狀態 圖8 豎直位姿
常見的模態分析法有有限元分析法[7,8]和振動實驗法[9],本文采用有限元分析法。
模態分析得到的機器人前10階固有頻率如表3所示。機器人在三種典型位姿下的固有頻率較為接近,最小包絡體積下的1階固有頻率為18.87 Hz,相比其他兩種姿態略有提高,最大高度位姿下的1階固有頻率最小,為12.25 Hz。
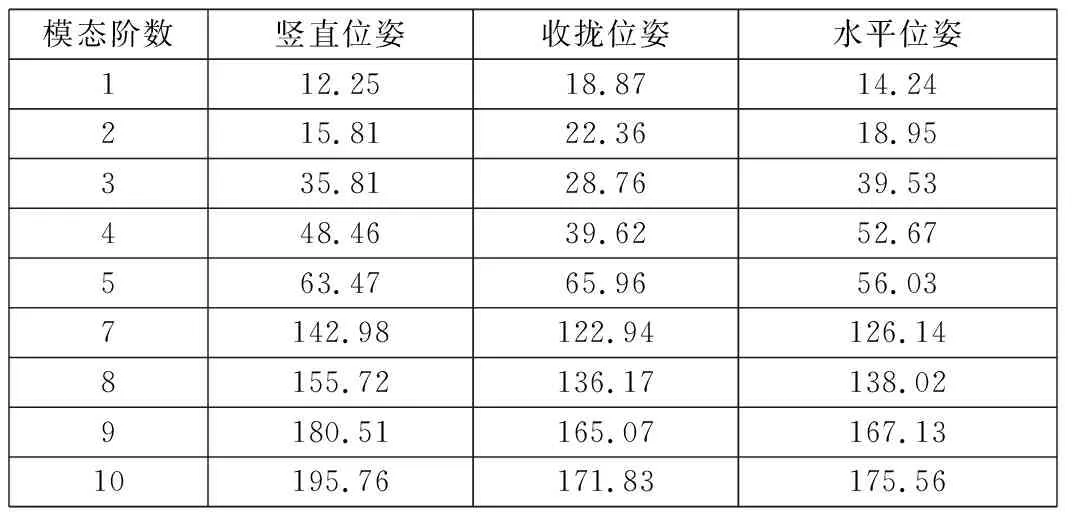
表3 機器人前10階固有頻率 Hz
三種位姿下的1階固有頻率均較低,處于10 Hz~20 Hz之間,可以看出,機器人整體結構的剛度較低,若需要提高機械人的低階固有頻率,后期需要進行結構加強,以提高整體剛性。
4 結論
通過對上下料機器人的靜力學分析和模態分析表明:
(1) 機器人機械臂結構滿足設計要求。
(2) 機器人的固有頻率較低,在實際工作中需要避開低階振型,防止低階振型帶來的危害,或者對機器人的整體剛度進行加強處理。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
當代工人(2020年8期)2020-05-25 09:07:38
電子制作(2018年18期)2018-11-14 01:48:24
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
山東工業技術(2016年15期)2016-12-01 05:31:22
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
