一種無人機自動換電系統的設計
2022-10-28 04:26:46趙梓杰蘭天翔鄒紅艷
機械工程與自動化 2022年5期
楊 睿,趙梓杰,蘭天翔,鄒紅艷
(南京林業大學 機械電子工程學院,江蘇 南京 210018)
0 引言
四旋翼無人機在當代社會已經有了較為廣泛的應用,但是續航問題還沒有得到很好的解決,一般無人機續航時間維持在10 min~20 min左右。因此,不少研究者提出一些方法以提升無人機的續航時間,例如利用無線充電等方式來延長無人機工作時間[1,2],或者是通過使用燃料電池進行續航[3]。張值勛等[4]提出通過算法提高無人機續航時間。但是有關無人機自動返回換電站更換電池的相關研究仍是較少。李海琳等[5]提出通過機器視覺和衛星-慣性導航組合定位來返回移動基站,但是成本較高。張帆等[6]對智慧換電平臺的設計作了簡要說明,但是缺少無人機返航方面相應的論述。
超寬帶技術(Ultra-Wideband,UWB)由于擁有較低的系統復雜度、較低的發射信號功率譜密度、較好的測距能力等性能,近年來廣泛應用于各種定位系統的設計中[7-15]。因此,本文將UWB技術與基于航軌推算法的IMU(Inertial Measurement Unit)定位技術相融合,作為無人機空間定位方式,并通過視覺識別換電站上圖標的方式進行無人機停靠,彌補UWB技術和IMU技術在實際應用場合中容易產生較大誤差的缺陷。
本文設計的飛行器首先使用UWB技術結合TDOA(Time Difference of Arrival,到達時間差)算法,通過4個地面基站與飛行器之間的通訊得出飛行器在空間中的坐標作大范圍低精度的定位;然后使用攝像頭作小范圍高精度定位,通過對采集到的圖像進行高斯濾波[16]結合霍夫變換法[17],得到換電站平面的圖形信息,從而準確降落。
1 UWB和IMU融合定位系統
1.1 UWB定位
UWB定位系統主要用于無人機實時的空間坐標獲取,由各自搭載NodeMCU-BU01開發板的4個基站和1個搭載NodeMCU-BU01模塊作為定位信標的無人機組成。UWB定位系統結構如圖1所示。
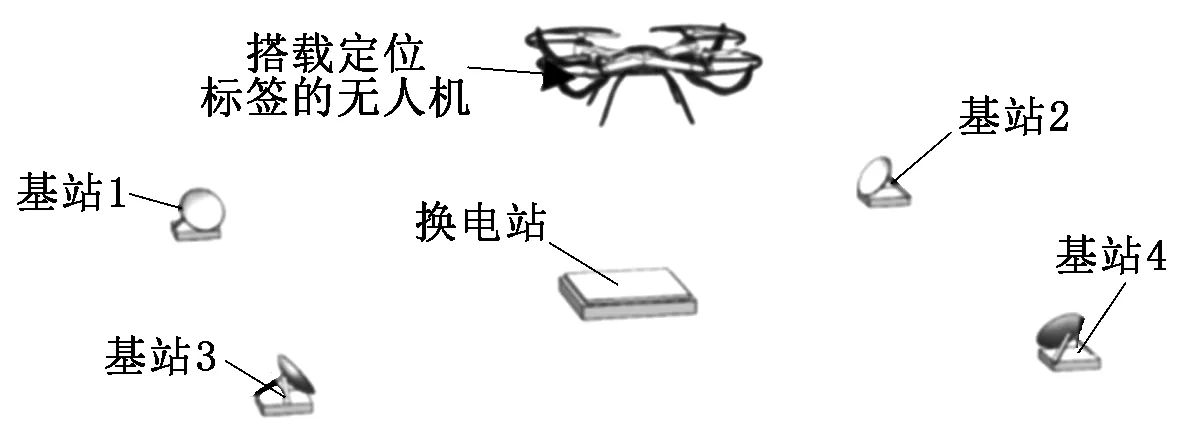
圖1 UWB定位系統結構圖
無人機標簽坐標的獲取采用TDOA算法,通過檢測無人機發出信號到達多個時間戳精準同步的基站的時間差來計算無人機的實際坐標。根據數學規律,到達兩個不動點的距離差為固定常數的點一定在以這兩個不動點為焦點的雙曲線上。現有基站1、2、3、4,則會有4條雙曲線,且唯一都相交于無人機標簽一點。算法示意圖如圖2所示。
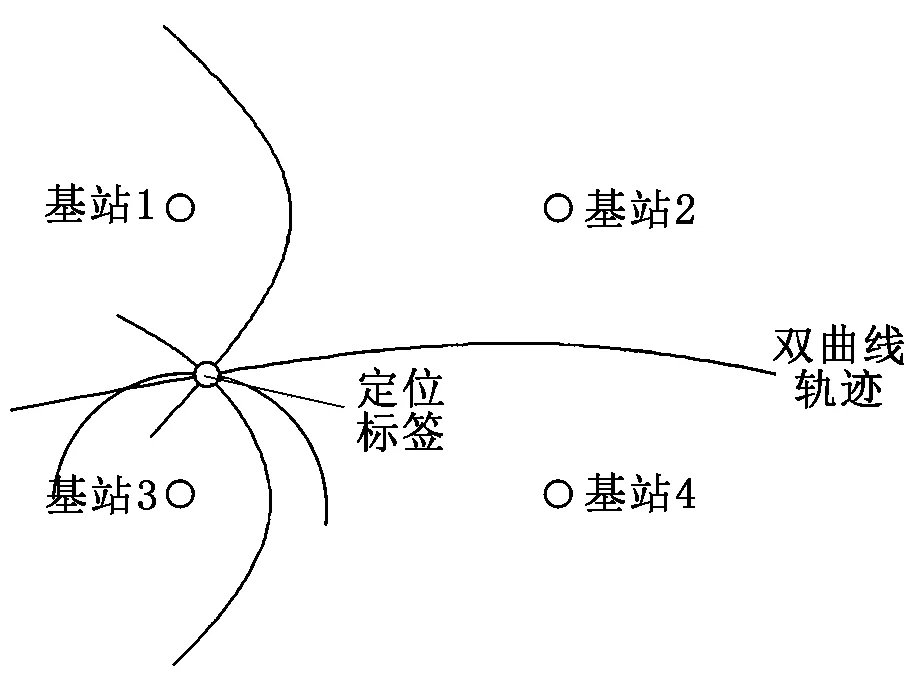
圖2 TDOA算法原理示意圖
現假設基站與無人機搭載的定位標簽時間戳同步,將4個基站和換電站的空間位置人為設置好。規定換電站的空間坐標Sc=(xc,yc,zc)T。UWB定位解算出的無人機定位標簽的空間坐標為Sf1=(xf1,yf1,zf1)T。基站i的空間坐標為Si=(xi,yi,zi)T,基站j的空間坐標為Sj=(xj,yj,zj)T。基站i、基站j與無人機定位標簽間的距離分別為Ri、Rj;Rij為基站i、基站j與定位標簽的距離之差。當定位標簽發出信號后,基站i與基站j接收到的時間分別為ti、tj;tij為基站i收到定位標簽發出信號的時間與基站j收到定位標簽發出信號的時間之差。當i=4時,j=1;否則,j=i+1;i,j=1,2,3,4。規定電磁波的傳播速度為C,則可以得到以下公式:
Rij=tij×C.
(1)
(2)
(3)
其中:Rij=Ri-Rj;tij=ti-tj。
(4)
(5)
由Rij=Ri-Rj可得:
(6)
將式(4)、式(5)代入式(6)中可得:
(7)
其中:xij=xi-xj;yij=yi-yj;zij=zi-zj。當i=4時,j=1;否則,j=i+1;i,j=1,2,3,4。
最終代入數據求解式(7),可解得無人機定位標簽的空間坐標Sf1=(xf1,yf1,zf1)T。
1.2 IMU定位
IMU是慣性測量單元的縮寫,IMU結合了陀螺儀和加速度計,可以測量運動物體的矢量加速度和三軸角速度,廣泛應用于無人機飛行控制。
IMU定位基于航軌推算法,即通過無人機前一時刻位置坐標及運動狀態推算出當前目標的位置坐標。反映在公式上表達如下:
(8)
其中:Sinit和Sf2分別為無人機的前一時刻位置坐標和IMU定位推算出的當前位置坐標,分別為(xinit,yinit,zinit)T和(xf2,yf2,zf2)T;v為IMU解算得到的無人機前一時刻空間速度矢量,為(vx,vy,vz)T;a為無人機前一時刻空間加速度矢量,為(ax,ay,az)T;T為系統采樣時間。每一次計算出的當前位置坐標都作為下一刻的前一時刻坐標。
1.3 UWB和IMU融合
基于TDOA的UWB定位需要信標與基站的定位模塊時間戳完全同步,且信號的傳輸會受到較大的環境影響。而IMU定位是基于運動積分進行的,因此歷史中的定位誤差會不斷累積體現在新的定位數據中,隨著時間的變化,定位精度不斷下降。將UWB和IMU定位進行融合,可以很好地彌補各自的缺陷。UWB和IMU定位算法更新過程如圖3所示。
UWB定位解算出無人機坐標Sf1=(xf1,yf1,zf1)T,IMU定位推算出無人機坐標Sf2=(xf2,yf2,zf2)T。Sf1乘以權值B,Sf2乘以權值A,兩者求和得出無人機的解算坐標Sf=(xf,yf,zf)T,并將無人機的解算坐標作為下一次IMU定位坐標推算的前一時刻位置坐標。權值A、B根據實際系統調節而定。上述計算用公式表達如下:
Sf=ASf2+BSf1.
(9)
A=1-B.
(10)
無人機執行返航動作后,實時比較無人機的空間坐標和換電站的坐標數據;當xf≈xc,yf≈yc,zf-zc≈X時,開始執行視覺輔助定位。其中,X為無人機距離換電站的豎直高度,根據實際系統的情況而定,確保攝像頭能捕捉到換電站上的圖形標志。
1.4 實驗數據
由于高度的測量難以進行,因此本系統在學校操場進行二維平面上的實驗。由人拿著定位標簽代替無人機。式(9)中的權值參數設置為:A=0.3,B=0.7。相關坐標設置如表1所示。

表1 實驗系統坐標設置 m
系統啟動后,對定位誤差記錄如圖4、圖5所示。
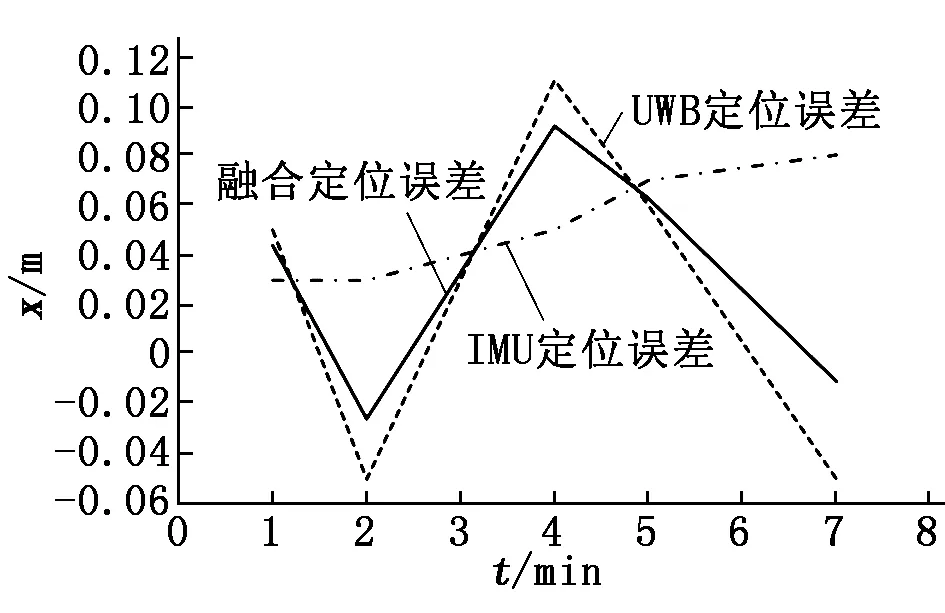
圖4 實驗數據橫坐標推算誤差
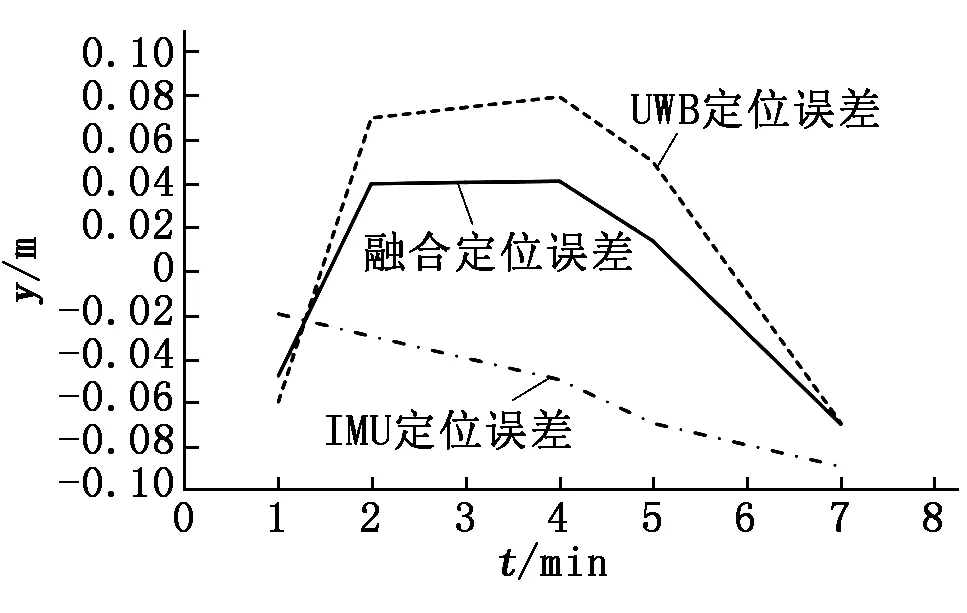
圖5 實驗數據縱坐標推算誤差
圖4、圖5為實驗數據誤差。從圖4和圖5中可以得出,UWB系統解算得出的坐標誤差不穩定,在0~11 cm左右。在采樣時間為4 min時,橫、縱坐標的解算誤差達到最大,此時是由于基站2與無人機定位信標的信號直線傳輸路徑被一擋板截斷,由此可見UWB定位系統受環境條件影響較大。IMU系統推算出的坐標雖然一開始誤差較小,但是隨著時間變化,誤差逐漸增大。將UWB和IMU定位技術融合后,補足了兩種方法各自的缺陷,減小了系統誤差,使其基本穩定在0~9 cm左右。
2 視覺輔助定位
2.1 識別系統及流程
視覺部分采用樹莓派、攝像頭結合OpenCV對換電站平臺上的圖形進行檢測識別,平臺表面示意圖如圖6所示。
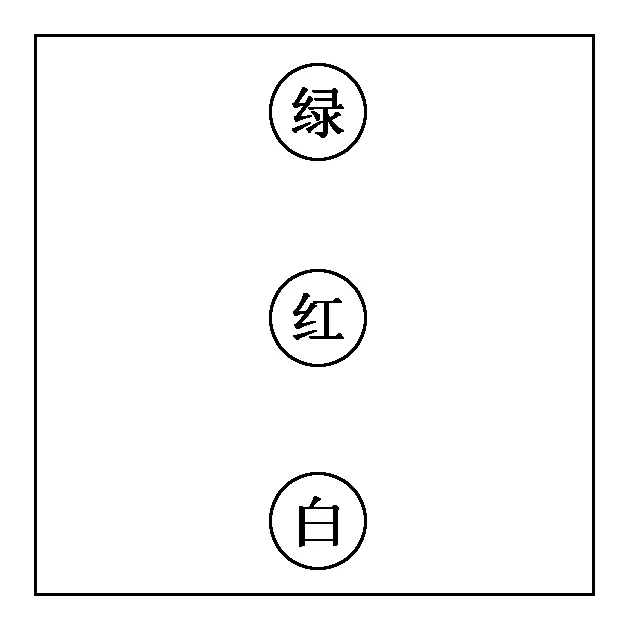
圖6 換電站平臺示意圖
換電站正方形平臺為全黑色,中間從上至下分別有綠、紅、白三個圓形標記,紅色圓心標記位于平臺的正中央。檢測識別流程如圖7所示。
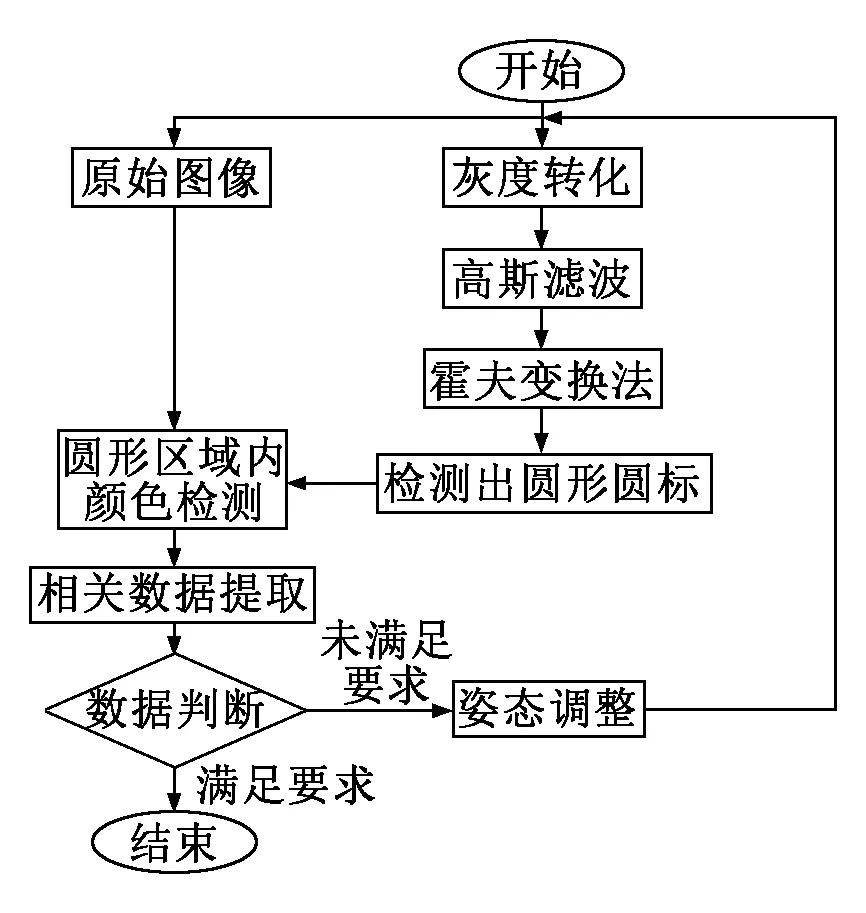
圖7 視覺定位檢測識別流程圖
在攝像頭開始工作后,將采集到的每幀圖像拷貝一份,并將拷貝的圖像灰度化,通過高斯濾波減少圖像中的噪點。再通過霍夫變換法檢測出灰度圖中的圓。隨后將圓在灰度圖中的區域標記在原始圖像上,并檢測圓形區域內的顏色,同時提取三個圓的中心坐標。
當三個中心圓的橫坐標未能保持在正方形平臺的中間,或紅色圓的圓形坐標未能處于正方形平臺的正中心,或圖像中從上至下并非是綠、紅、白的順序,則不滿足要求,無人機需根據參數情況進行平移或者旋轉直至要求滿足,視覺輔助定位部分結束。
2.2 圓檢測實驗
通過霍夫變換法對圖6中的圓進行檢測,提取出中心坐標。檢測數據如表2所示。根據圖6,給圖中圓自上而下編號為圓1、圓2、圓3。
由圖6和表2可知,實驗結果準確,視覺輔助定位方法可行。
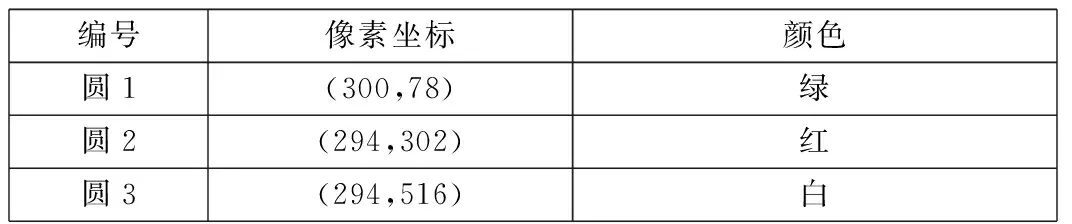
表2 圓檢測實驗數據
3 無人機電源系統設計
在無人機自動換電系統中,電源結構的設計與換電過程關聯緊密,為保證換電過程的順利進行,無人機端的微型處理器必須保持全程帶電不停機的狀態,為此設計大、小雙電池方案來構建無人機的電源系統。
大電池為無人機的主電源部分,為11.2 V鋰電池,為無人機上所有設備供電。該電池設計為由電磁卡扣與機身連接的快速拆卸形式,方便在換電時電池快速脫落以及新電池的安裝。電池的兩個電源觸點與無人機電源系統之間使用接觸式彈簧觸點連接,在保證良好的電流供應前提下做到了電池的快拆卸設計,如圖8所示。
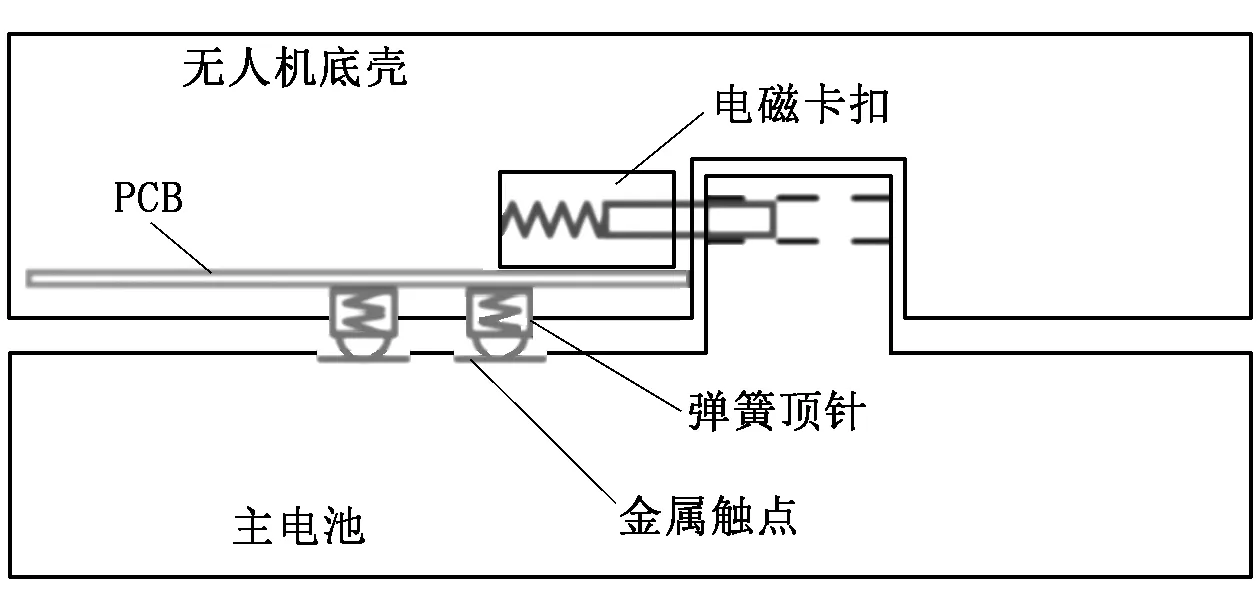
圖8 無人機主電池部分結構圖
副電池是無人機的備用電池,其容量較小。副電池保證無人機系統在大電池脫落的情況下,與換電過程直接相關的器件有充足的電力供應。在本系統中,以一塊超級電容作為無人機的副電池,其最大的特點是支持的充放電電流極大,完全可以滿足短時間大電流工作需求。
主電池需通過BUCK降壓DC-DC電路[18]進行降壓,從而為無人機內部所有低壓器件進行供電。副電池的放電端需設置BOOST升壓DC-DC電路[19],使輸出到系統的電壓維持穩定。主、副電池的電路結構如圖9所示。
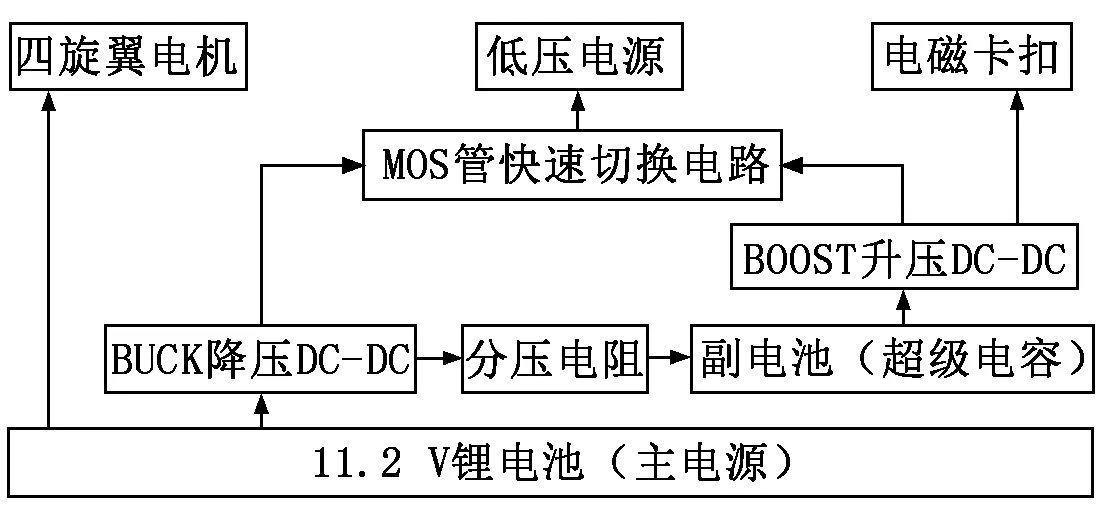
圖9 主、副電池電路結構圖
4 結束語
本文設計了一套無人機自動換電的理論定位系統,通過UWB和IMU融合定位技術和圖像處理技術確保無人機在電池低壓后能夠自動地返回換電站進行電池更換。在室外環境下,UWB和IMU融合定位技術可以控制定位誤差在0~9 cm左右,基本滿足定位的需求。通過研究分析,本文提出的方案雖然仍未解決無人機延長供電時間等問題,但是可以通過自動檢測并更換電池,達到更長時間持續執行任務的效果,對于無人機監測等領域具有一定的意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
