鋤鏟式玉米中耕除草機設計與作業(yè)性能研究
2022-10-30 05:55:08牛萌萌方會敏薦世春
農(nóng)業(yè)裝備與車輛工程 2022年3期
牛萌萌,方會敏,薦世春
(250100 山東省 濟南市 山東省農(nóng)業(yè)機械科學研究院)
0 引言
雜草作為農(nóng)作物強有力的競爭對手,其與作物爭奪養(yǎng)分和水分,直接影響作物產(chǎn)量和質量[1],同時也是病蟲害的主要寄主,農(nóng)田雜草滋生已成為農(nóng)業(yè)生產(chǎn)不可忽視的一個重要問題。目前國內對雜草的控制一般采用化學法,化學除草具有高效、及時、省工、徹底等特點[2]。但其帶來諸如雜草群落變遷[3]、抗藥性增強且抗藥譜擴大[4],以及環(huán)境污染[5]、農(nóng)藥殘留[6]等問題。自2016年以來,每年的中央1 號文件都提到農(nóng)藥化肥零增長,甚至2018 年以來強調農(nóng)藥化肥投入減量化、負增長。
在國家大力提倡減藥增效和雜草綠色防控背景下,機械除草作為一種環(huán)境友好、針對性強、見效快且兼具農(nóng)藝功能的非化學防除方法,對于應對抗性雜草繁衍、農(nóng)業(yè)環(huán)境惡化和糧食安全挑戰(zhàn)等具有重要意義[7]。本文從行間鋤鏟式中耕除草機的設計出發(fā),首先對鋤鏟式除草機作用下土壤和秸稈的運動進行研究,進而分析了行間除草作業(yè)后土壤的破碎情況,為除草機械的設計與優(yōu)化提供理論參考。
1 整機結構與關鍵部件設計
1.1 整機結構及工作原理
黃淮海地區(qū)的玉米種植模式一般為60 cm 等行距播種,少數(shù)農(nóng)戶以70 cm 等行距播種。因此本文設計的鋤鏟式除草機行間距為60±10 cm(可調)。該除草機由6 個(共3 組)鋤鏟式除草部件組成,每個作業(yè)行內有2 個鋤鏟安裝在前后梁上,以保證玉米行間雜草的清除效果。
拖拉機在前進過程中,鋤鏟將土體破開,切開撕裂土壤的同時將行間雜草從土壤中拔出,并引導行間雜草運移至兩側。田間除草時,調整仿形輪使鋤鏟入土深度控制在10~15 cm。
1.2 鋤鏟設計
行間中耕除草鏟主要由鏟柄和鋤鏟組成,如圖1 所示。其主要設計參數(shù)包括鋤鏟入土角α、切土角β、鏟翼張角γ、鋤鏟作業(yè)幅寬B。
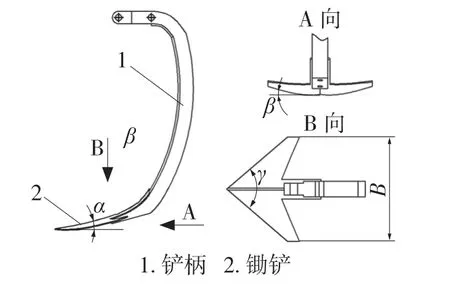
圖1 行間鋤鏟式除草部件Fig.1 The weeding parts of inter-row hoe type weeder
鋤鏟入土角過小時,鏟刃部強度較弱;而入土角過大,工作時土壤上移量增加、土層抬高、土壤擾動增強,造成中耕除草時整機工作阻力增加。本文鋤鏟的入土角α設計為16 °。
鋤鏟切土角過小時會影響鏟面高度;切土角過大時,土壤易被推向兩側,使土壤外翻量增加,極易在除草過程對兩旁植株造成壓苗傷苗情況。本文切土角β設計為10 °。
鏟翼張角的作用是引導雜草沿刃口滑切,使雜草順利滑出鋤鏟表面,防止雜草纏繞在鋤鏟上。因此本文鏟翼張角γ設計為80 °,既避免了過小張角造成鏟翼切斷草根的能力減弱,也避免了張角過大時發(fā)生纏草、黏土、擁堵。
考慮到設計的鋤鏟應對現(xiàn)有玉米播種行距具有普遍適用性,同時充分考慮沒有自動駕駛輔助情況下農(nóng)機操作者的操作誤差,出于對兩側玉米植株的保護考慮,結合整機鋤鏟部件的布置結構,此處鋤鏟作業(yè)幅寬B 設計為265 mm。
2 試驗參數(shù)與方法
2.1 試驗地點
試驗于2020 年7 月在山東省農(nóng)業(yè)機械科學研究院試驗基地山東省濟南市章丘區(qū)棗園鎮(zhèn)進行,該試驗田已連續(xù)進行了多年小麥-玉米輪作試驗。試驗時正值玉米苗4~5 葉期,是機械除草的關鍵時期。經(jīng)調查,田內雜草以麥草和裂葉牽牛占絕對優(yōu)勢。試驗時,土壤密度為1.45 g/cm3,0~5 cm、5~10 cm 土層內土壤平均含水率分別為16.37%和16.41%,5 cm 和10 cm 處土壤緊實度分別為0.71,0.46 MPa。
2.2 試驗小區(qū)布置
為了測量除草過程中土壤和雜草的運動,本研究采用示蹤法[8-10]。使用不銹鋼塊模擬土壤。試驗時,將不銹鋼塊嵌入土壤中模擬不同位置土塊,將標牌系在雜草上標記不同位置雜草,通過追蹤示蹤器的運動來分析土壤和雜草的運動情況。其中,土壤示蹤器按照不同深度和距離除草中心線不同位置進行布置,雜草示蹤器則在自然生長位置處的雜草上進行標記。土壤示蹤器和雜草示蹤器布置如圖2 所示。除草試驗重復3 次,單次除草長度為30 m。
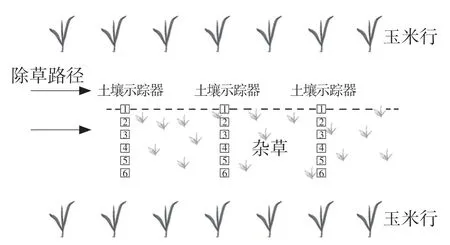
圖2 土壤和雜草示蹤器布置圖Fig2 Schematic view of tracer placements in field
除草試驗中,在除草鏟除草路徑中心線垂直方向上布置土壤示蹤器,編號1 的示蹤器布置在相鄰2 行玉米的中心線上,之后分別以5 cm 間隔布置編號2~6 的土壤示蹤器。按此相對位置,在地表、地下5 cm 處及地下10 cm 處分別布置示蹤器,即合計18 個示蹤器。單次試驗布置3 組,合計54 個土壤示蹤器。
雜草按實際生長位置進行標記,其中距離除草路徑中心線垂直距離小于5 cm 范圍內的雜草定義為第一范圍內雜草;距離除草路徑中心線垂直距離5~15 cm 范圍內的雜草定義為第2 范圍內雜草;距離除草路徑中心線垂直距離15~25 cm范圍內的雜草定義為第3 范圍內雜草。
2.3 試驗測定內容
2.3.1 除草效果
每個試驗小區(qū)選擇3 個樣點(寬為玉米行距0.7 m,長為0.45 m),將此范圍內的雜草全部拔出,記錄雜草的株數(shù)并稱其鮮重。
利用式(1)、式(2)計算株防效Ep和鮮重防效Ef:

式中:Ep——株防效;Nb——空白對照區(qū)雜草株數(shù);Nt——處理區(qū)雜草株數(shù)。

式中:Ef——鮮重防效;Wb——空白對照區(qū)雜草鮮重;Wt——處理區(qū)雜草鮮重。
單次除草試驗后,統(tǒng)計30 m 試驗區(qū)內被土塊壓住或被除草部件刮傷的玉米植株株數(shù),利用式(3)計算傷苗埋苗率Rs:
式中:Rs——傷苗埋苗率;NI——被傷被埋玉米株數(shù);NP——玉米總株數(shù)。
2.3.2 土壤和雜草的運動
土壤和雜草的運動情況通過測量各示蹤器在除草作業(yè)前后的位置之差來表達,通過不同位置示蹤器的運動位移結合除草部件結構分析土壤和雜草在除草機作用下的運動特性。
2.3.3 土壤的破碎特征
采用數(shù)碼攝像機(SONY SR11E)對除草過程進行跟蹤拍攝,分析每幀圖像中土壤的破碎行為,歸納總結土壤結構在不同除草機構作用下的破壞規(guī)律。
每次試驗后,在除草試驗路徑過程中框選出3 處(長×寬=60 cm×60 cm)進行除草后土壤尺寸的測量,每個取樣框中隨機選取10 個破碎后的土壤塊進行最大直徑的測量。
3 結果與討論
土壤和秸稈在鋤鏟式玉米中耕除草機作用下有破碎、運移等情況,雜草在除草機作用下的運移及土壤的運動和破碎情況直接反映工作部件的作用效果。通過對其作用下土壤和雜草的運動情況進行分析,可以歸納總結除草機的作用方式及范圍。土壤在除草機作用下的破碎情況能夠反映除草機作用過程對土壤的擾動。雜草的清除效果則是除草機械工作效果的最直接反映,是衡量除草機械作業(yè)效果的首要因素。
3.1 雜草的清除效果
鋤鏟式除草機單行內的作業(yè)幅寬較大(36.5 cm),因此土壤受擾動面積大,導致雜草清除面積大,除草率高。在此次試驗中,鋤鏟式玉米中耕除草機的除草株防效為83.4%,鮮重防效為82.6%。而且,鋤鏟式除草部件入土較深,作業(yè)時的最大土壤擾動寬度可達 62 cm 以上,更進一步提高了雜草清除效果。
然而,鋤鏟式除草機作業(yè)時土壤擾動大,也常出現(xiàn)將部分土塊拋至玉米苗上,造成其傷苗壓苗比率達3.6%。
3.2 土壤的運動
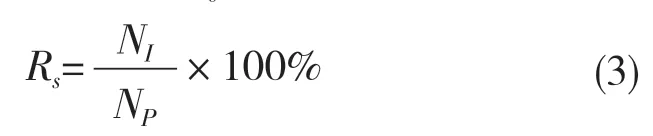
鋤鏟式玉米中耕除草機作用下土壤的運動情況如圖3 所示。在鋤鏟式除草機作用下,表層各位置土壤的水平位移顯著大于其縱向位移,主要原因在于鋤鏟式除草部件的作業(yè)方式是水平前進式。1~3 號位置的土壤示蹤器運動位移較大,因其處于鋤鏟直接作用范圍內,受鋤鏟運動的影響大;4~6 號位置的示蹤器距離鋤鏟的有效運動范圍較遠,故運動位移較小,尤其6 號示蹤器的運動僅僅是因鏟翼對其周邊土壤的擾動。
圖3 鋤鏟式除草機作用下土壤的運動位移Fig.3 The soil displacements under the condition of mechanical weeding with hoe-type weeder
在所有示蹤器中,2 號位置的土壤示蹤器既靠近右側鋤鏟的鏟尖(水平距離約82.5 mm),同時又位于左側鋤鏟的鏟翼運動范圍內(與鏟翼的垂直坐標相同),因此在雙鏟作用下的位移最大;而3 號位置的示蹤器雖距離右側鋤鏟的鏟尖最近,但缺乏左側鏟尖的二次作用,其運動位移對比2 號位置的示蹤器運動位移要小得多。同理,1 號位置的示蹤器雖距離左右側的鏟尖都較遠,但是在雙鏟作用下的運動位移還是大于3 號而小于2 號示蹤器的運動位移。
對于土下5 cm 處的土壤運動而言,僅1~3號位置的土壤有小范圍運動,其不同位置的運動位移與表層土壤的運動位移具有類似趨勢。但對于土下10 cm 處的土壤而言,其運動位移極小,可能是地表不平或秸稈等的存在影響了除草機的作業(yè)深度。對于深度方向的運動而言,幾乎表層和土下5 cm 位置的所有土壤示蹤器都往表層運動,這與鏟面非水平面有關,說明鋤鏟式除草機有破土及小幅翻土的效果,作業(yè)時土壤擾動較大。
3.3 雜草的運動
對除草作業(yè)而言,在3 個范圍內共布置了雜草示蹤器27 株。在第1 范圍內有運動位移的雜草比例占88.9%;第2、3 范圍內則分別是83.3%和58.3%,而第3 范圍之外的雜草皆沒有運動。
若以3 號土壤示蹤器的位置為基準,向內考查此范圍(即對應土壤示蹤器1~3 位置的范圍)內雜草的運動比例,發(fā)現(xiàn)此范圍內高達80%的雜草有運動,此與前述分析土壤運動的趨勢一致,主要因為此范圍為鋤鏟的高效運動范圍。
縱觀所有雜草的運動,發(fā)現(xiàn)運動雜草的平均水平位移為20.8 cm,縱向位移為38.1 cm;而鋤鏟高效運動范圍內的雜草平均水平位移為30.3 cm,縱向位移為38.1 cm;非鋤鏟高效運動范圍內的雜草平均水平位移和縱向位移為1.7 cm 和38.0 cm。
由此可見,在鋤鏟式除草機作用下,不同位置雜草縱向運動位移相差不大,都在鋤草部件前進過程中因破土被側向移位;而不同位置的雜草其跟隨鋤鏟前進的距離不同,越靠近鋤鏟的中心位置,其越容易跟隨鋤鏟前進至一定程度被拋出。
3.4 土壤的破碎
鋤鏟式玉米中耕除草機作用下的土壤結構變化如圖4 所示。鋤鏟式除草機工作時,呈垂直安裝的鏟柄最下端的鋤鏟向前上方擠壓土壤,被擠壓的土壤向鏟柄和鋤鏟的兩側移位同時產(chǎn)生裂紋。鋤鏟的持續(xù)向前運動,使得裂紋進一步擴大(見圖4(b)),進而在鏟柄和鋤鏟通過時土壤發(fā)生破碎(見圖4(c))。
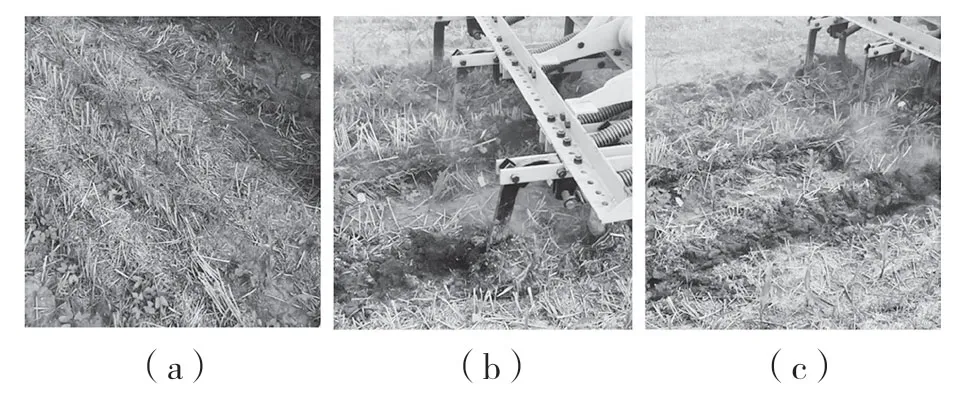
圖4 鋤鏟式除草機作用下土壤的破碎過程Fig.4 The crushing process of the complex under the action of hoe-type weeder
鋤鏟式除草機作業(yè)后土壤結構典型直徑為10.4 cm。同時其除草后的土壤體積較大,處于幼苗期的雜草根系較完整地包含在該土壤中。鋤鏟式除草機作業(yè)后5 cm 處的土壤緊實度約254.0 kPa,較未除草前降低了64.4%。
4 結語
針對玉米田雜草的機械防除需求,本文設計了一種行間鋤鏟式玉米中耕除草機。并從土壤和雜草運動、土壤破碎、除草效果等角度對其作業(yè)性能進行了研究。
研究表明,鋤鏟式除草機作用下,表層各位置土壤的水平位移顯著大于其縱向位移,且位于鋤鏟高效運動范圍內的土壤運動位移顯著大于非高效運動范圍內的土壤運移。處于鋤鏟高效運動范圍內的雜草運動比例高達80%,此范圍內雜草平均水平位移為30.3 cm,縱向位移為38.1 cm;鋤鏟式除草機主要靠擠壓作用讓土壤破碎,破碎后土壤結構的典型直徑為10.4 cm,5 cm 深度處土壤緊實度降低了64.4%。
猜你喜歡
科教新報(2022年22期)2022-07-02 12:34:28
今日農(nóng)業(yè)(2021年5期)2021-11-27 17:22:19
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
高中生學習·閱讀與寫作(2019年2期)2019-09-10 07:22:44
故事大王(2016年7期)2016-09-22 17:30:08
現(xiàn)代農(nóng)業(yè)(2015年5期)2015-02-28 18:40:49
兒童故事畫報(2013年3期)2013-06-24 05:40:30
雜草學報(2012年1期)2012-11-06 07:08:33
