葉菜類(lèi)收割機(jī)行走機(jī)構(gòu)設(shè)計(jì)及有限元分析
2022-10-30 05:55:16高玉芝王君玲高欣張衛(wèi)國(guó)馬強(qiáng)趙學(xué)軍仁德志
農(nóng)業(yè)裝備與車(chē)輛工程 2022年3期
高玉芝,王君玲,高欣,張衛(wèi)國(guó) ,馬強(qiáng),趙學(xué)軍,仁德志
(1.063000 河北省 唐山市 河北省智能裝備數(shù)字化設(shè)計(jì)及過(guò)程仿真重點(diǎn)實(shí)驗(yàn)室,唐山學(xué)院;2.063000 河北省 唐山市 唐山蘭坨機(jī)械設(shè)備有限公司;3.110866 遼寧省 沈陽(yáng)市 沈陽(yáng)農(nóng)業(yè)大學(xué))
0 引言
我國(guó)是蔬菜生產(chǎn)大國(guó),近年來(lái),蔬菜產(chǎn)量、產(chǎn)值均超糧食,成為我國(guó)第一大農(nóng)產(chǎn)品[1]。蔬菜的產(chǎn)銷(xiāo)量中葉菜類(lèi)蔬菜占到了30%~40%[2]。在葉菜類(lèi)蔬菜中,北方地區(qū)又以韭菜居多。韭菜是中國(guó)大規(guī)模種植的蔬菜,常年種植面積占蔬菜田總面積的60%~70%[3]。
在蔬菜生產(chǎn)作業(yè)中,收獲作業(yè)約占整個(gè)作業(yè)量的40%[4]。以韭菜收獲為例,我國(guó)韭菜產(chǎn)地多在北方地區(qū),基本上種植在春季拱棚和冬季溫室大棚中。首先由于設(shè)施空間小、不標(biāo)準(zhǔn),普遍存在著作業(yè)機(jī)械“路難走、門(mén)難進(jìn)、邊難耕、頭難掉”的現(xiàn)象,導(dǎo)致行走裝置難以達(dá)到良好的通過(guò)性[4],在這樣的空間中進(jìn)行作業(yè),對(duì)于收獲機(jī)械的行走機(jī)構(gòu)提出了較高的要求;其次,韭菜的采收有一定的農(nóng)藝要求,特別是對(duì)割茬高度要進(jìn)行精準(zhǔn)控制。割茬過(guò)高不但影響到收割產(chǎn)量,還可能導(dǎo)致割刀在在葉柄的基部之上進(jìn)行切割,從而導(dǎo)致散葉;割茬過(guò)低可能會(huì)傷害韭菜葉鞘的分生組織和幼芽,進(jìn)而影響后期產(chǎn)量,嚴(yán)重的可能會(huì)傷到根部,影響韭菜的生長(zhǎng)。多年生韭菜收割時(shí)葉鞘基部要留5 cm 左右,不能割得過(guò)高或過(guò)低[5]。因此,要求收割機(jī)既能適應(yīng)種植環(huán)境條件,又可以根據(jù)地面高度自動(dòng)調(diào)節(jié)割刀高度,從而自動(dòng)調(diào)節(jié)割茬高度,以滿(mǎn)足韭菜的收割要求。
課題組根據(jù)我國(guó)北方設(shè)施農(nóng)業(yè)生產(chǎn)實(shí)際,研究和設(shè)計(jì)了一款結(jié)構(gòu)緊湊、易于操作和控制的葉菜類(lèi)收割機(jī)。本文主要對(duì)所設(shè)計(jì)收割機(jī)的關(guān)鍵部分即四輪驅(qū)動(dòng)差速轉(zhuǎn)向水平微調(diào)行走機(jī)構(gòu)結(jié)構(gòu)設(shè)計(jì)(包括工作參數(shù)進(jìn)行了設(shè)計(jì)和選型)進(jìn)行分析、機(jī)構(gòu)工作原理進(jìn)行了闡述,同時(shí)對(duì)機(jī)架部分受力進(jìn)行了有限元分析。為后續(xù)的機(jī)器加工和制造奠定了基礎(chǔ)。
1 四輪驅(qū)動(dòng)差速轉(zhuǎn)向水平微調(diào)行走機(jī)構(gòu)總體設(shè)計(jì)
蔬菜收獲機(jī)的行走裝置是解決收獲機(jī)在田間行走、移動(dòng)、轉(zhuǎn)向及轉(zhuǎn)場(chǎng)等問(wèn)題的機(jī)構(gòu)[6]。要求行走裝置對(duì)田間起伏不平的地形和土壤環(huán)境具有較強(qiáng)的適應(yīng)性、行走平穩(wěn)性、高通過(guò)性、低打滑率,并且要減少對(duì)田地的碾壓。
1.1 整體結(jié)構(gòu)組成
四輪驅(qū)動(dòng)差速轉(zhuǎn)向水平微調(diào)行走機(jī)構(gòu)結(jié)構(gòu)如圖1 所示,主要包括機(jī)架,以及由行走電機(jī)、離合器、輪胎等構(gòu)成的行走機(jī)構(gòu)。機(jī)架作為基礎(chǔ),上面安裝有動(dòng)力電池、收割刀架及收割刀、柔性震蕩梳理機(jī)構(gòu)、打捆機(jī)構(gòu)等主要功能部件,下面裝有行走機(jī)構(gòu)。
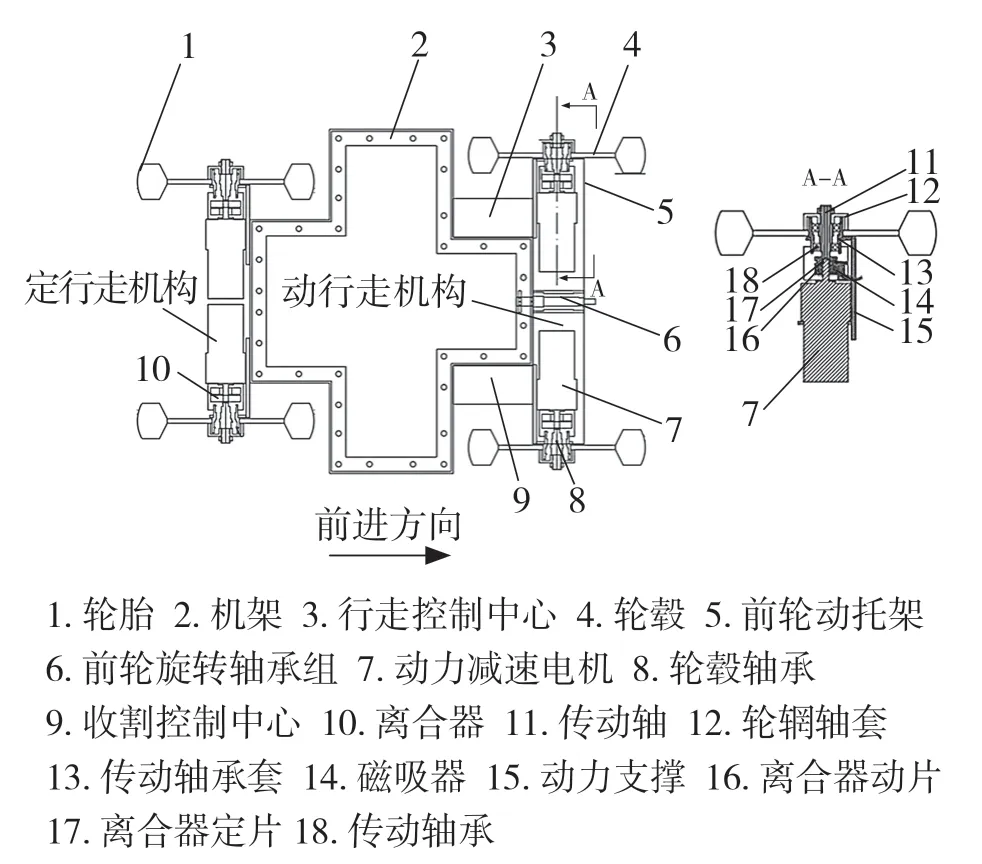
圖1 四輪驅(qū)動(dòng)差速轉(zhuǎn)向水平微調(diào)行走機(jī)構(gòu)Fig.1 Four-wheel drive differential steering and horizontal fine tuning walking mechanism
設(shè)計(jì)的行走機(jī)構(gòu)具有2 個(gè)功能:(1)機(jī)器四輪驅(qū)動(dòng)行走,具有差速轉(zhuǎn)向功能;(2)為保證割茬高度,可以實(shí)現(xiàn)在水平面高度的微調(diào)功能。
1.2 工作原理
(1)四輪驅(qū)動(dòng)差速轉(zhuǎn)向功能
由圖1 可以看出,行走機(jī)構(gòu)位于機(jī)架沿著行走方向的兩側(cè),包括定行走機(jī)構(gòu)(后輪)和動(dòng)行走機(jī)構(gòu)(前輪)。
定行走機(jī)構(gòu)包括2 個(gè)行走輪、離合器以及2個(gè)動(dòng)力減速電機(jī),兩側(cè)行走機(jī)構(gòu)分別和機(jī)架固定。
動(dòng)行走機(jī)構(gòu)的組成基本上與定行走機(jī)構(gòu)相同,不同的是定行走機(jī)構(gòu)包括了一個(gè)固定板,固定板上設(shè)置有軸套,動(dòng)行走機(jī)構(gòu)和機(jī)架采用軸桿連接。定行走機(jī)構(gòu)和動(dòng)行走所采用的減速電機(jī)、輪胎、離合器型號(hào)相同。
行走機(jī)構(gòu)的運(yùn)動(dòng)主要由圖1 中部件3 行走控制中心進(jìn)行控制,電機(jī)與車(chē)輪的動(dòng)力傳輸由離合器分離和結(jié)合實(shí)現(xiàn)。按照輪轂電機(jī)原理,同側(cè)為一組可正反驅(qū)動(dòng),4 個(gè)輪轂電機(jī)的轉(zhuǎn)向和轉(zhuǎn)速可以單獨(dú)進(jìn)行控制。路面平整時(shí),4 個(gè)行走輪以相同的速度進(jìn)行直線行駛;原地轉(zhuǎn)向時(shí),由內(nèi)側(cè)車(chē)輪反轉(zhuǎn)、外側(cè)車(chē)輪正轉(zhuǎn)實(shí)現(xiàn),大大減小了轉(zhuǎn)彎半徑,這對(duì)于棚室狹小空間作業(yè)至關(guān)重要。并且,4 個(gè)輪轂電機(jī)的獨(dú)立驅(qū)動(dòng)保證了行走平穩(wěn)性,降低了輪胎的打滑率。
(2)水平微調(diào)功能
沿著機(jī)器的行走方向,機(jī)架前方安裝有收割刀架及收割刀。實(shí)際工作中,當(dāng)左右兩側(cè)行走輪地面高度不一致時(shí),動(dòng)行走機(jī)構(gòu)中的前輪托架5之上安裝的前輪旋轉(zhuǎn)軸承6 之內(nèi)的旋轉(zhuǎn)軸就會(huì)發(fā)生偏轉(zhuǎn)。假定工作時(shí)左邊的土壤表面高于右邊的土壤表面,旋轉(zhuǎn)軸偏轉(zhuǎn)時(shí),托架左側(cè)就會(huì)向上傾斜,帶動(dòng)左側(cè)的割刀同時(shí)向上傾斜,右邊的動(dòng)行走機(jī)構(gòu)由于高度未發(fā)生變化,托架上的割刀仍然正常保持水平。割刀的高度隨著地面的起伏由水平微調(diào)機(jī)構(gòu)自動(dòng)進(jìn)行調(diào)整,隨著行走輪高度的調(diào)整進(jìn)行仿形運(yùn)動(dòng),從而降低了收割刀具兩端上下浮動(dòng)頻率,保證了收割產(chǎn)品質(zhì)量及留茬高度。此外,定行走機(jī)構(gòu)的左右驅(qū)動(dòng)輪之間的距離小于動(dòng)行走機(jī)構(gòu)的左右驅(qū)動(dòng)輪之間的距離。這樣就保證了前后車(chē)輪在運(yùn)動(dòng)中不同轍,解決了同轍對(duì)地面重復(fù)碾壓的危害。
2 行走機(jī)構(gòu)工作參數(shù)計(jì)算及電機(jī)選型
2.1 行走機(jī)構(gòu)工作參數(shù)計(jì)算
行走機(jī)構(gòu)所需要的功率與機(jī)器的行走速度、收割機(jī)質(zhì)量以及土壤條件等有關(guān)。蔬菜收獲機(jī)在行走時(shí),車(chē)輪與地面之間會(huì)產(chǎn)生滾動(dòng)摩擦力。收割機(jī)正常工作時(shí)以 0.5 m/s 的速度行駛,輪子直徑D=200 mm,收割機(jī)整機(jī)質(zhì)量80 kg,按照800 N 進(jìn)行計(jì)算。工作時(shí),收割機(jī)驅(qū)動(dòng)輪與地面會(huì)產(chǎn)生切向、法向的相互作用力,阻礙輪子行走的力被稱(chēng)為滾動(dòng)阻力,用Ff表示。
依據(jù)收割機(jī)的機(jī)械設(shè)計(jì)手冊(cè)可得出驅(qū)動(dòng)輪滾動(dòng)阻力

式中:G——收割機(jī)整機(jī)總重,取為800 N;μ——滾動(dòng)阻力系數(shù),滾動(dòng)阻力系數(shù)根據(jù)機(jī)械設(shè)計(jì)手冊(cè)可知選取0.25[7]:α——坡角度,取值為0(因?yàn)榕锸彝恋剌^為平整)。
計(jì)算得:Ff=200 N。
驅(qū)動(dòng)整臺(tái)機(jī)器需要扭矩為

2.2 電機(jī)選型
電機(jī)每分鐘的轉(zhuǎn)速為

當(dāng)收割機(jī)以最快速度0.8 m/s 工作時(shí),代入式(3),得到電機(jī)轉(zhuǎn)速為74 r/min。依據(jù)設(shè)計(jì)手冊(cè),取傳動(dòng)比i=4,傳動(dòng)效率η=0.96,安全因數(shù)n=2,則電機(jī)額定轉(zhuǎn)速n額=304 r/min。

當(dāng)收割機(jī)以v=0.8 m/s 行走時(shí)輸出最高功率P=Fv=160 W。
通過(guò)計(jì)算,可以確定行走電機(jī)參數(shù):額定電壓24 V,額定輸出功率80 W,額定轉(zhuǎn)速310 r/min,額定扭矩11 N·m,額定電流8.5 A,電機(jī)效率80%。
電機(jī)功率與牽引力、行駛速度、電機(jī)扭矩和電動(dòng)機(jī)轉(zhuǎn)速存在以下關(guān)系[8]

式中:P——提供的最大牽引力,N;v——機(jī)器行走最大速度,m/s;T——扭矩,N·m;n——額定轉(zhuǎn)速,r/min;η——電機(jī)效率。
將上述數(shù)據(jù)代入公式計(jì)算可得F=345 N。
電機(jī)提供的牽引力大于驅(qū)動(dòng)輪的滾動(dòng)阻力,所以電機(jī)選型合適。
3 機(jī)架的有限元分析
機(jī)架是整機(jī)的核心承載區(qū),需要對(duì)其進(jìn)行靜力有限元分析,驗(yàn)證其強(qiáng)度。
3.1 機(jī)架的載荷施加
將模型導(dǎo)入,在DM 中建立印記面,進(jìn)行六面體網(wǎng)格劃分,共15 151 個(gè)單元,52 107 個(gè)節(jié)點(diǎn)。施加邊界條件載荷和遠(yuǎn)端力載荷,并施加了線約束,如圖2 所示。
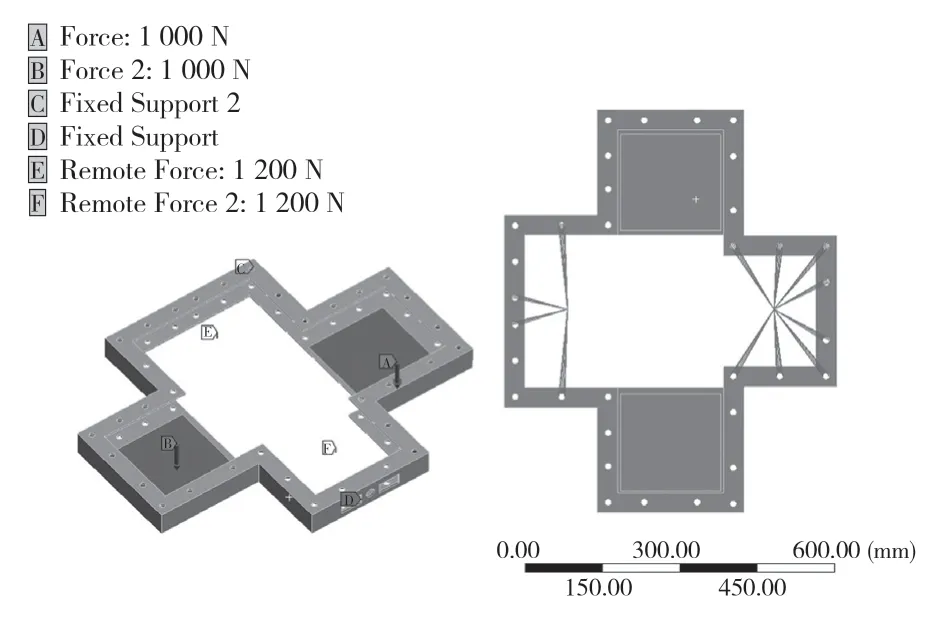
圖2 載荷施加情況Fig.2 Load application
3.2 結(jié)果分析
首先進(jìn)行變形分析,變形圖如圖3 所示。載重兩端變形量較大,最大變形量為1.117 mm,遠(yuǎn)小于許用變形量,剛度滿(mǎn)足使用要求。
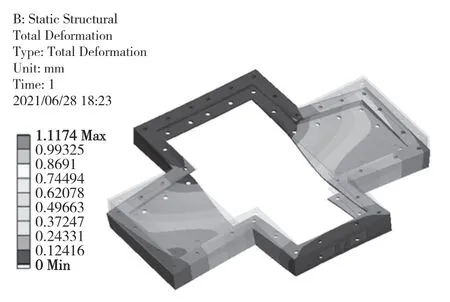
圖3 變形圖Fig.3 Deformation
然后進(jìn)行Mises 應(yīng)力分析,應(yīng)力圖如圖4 所示。分析結(jié)果表明,最大應(yīng)力282.13 MPa,發(fā)生在切割臺(tái)連接處和水平微調(diào)機(jī)構(gòu)連接處,與實(shí)際情況相一致。因有線約束的存在,有應(yīng)力集中現(xiàn)象,如圖4 所示,左側(cè)探針標(biāo)出為應(yīng)力集中點(diǎn),除去應(yīng)力集中點(diǎn),應(yīng)力較大處為180 MPa 左右,其余位置為30 MPa 以下。分析結(jié)果表明,該機(jī)架滿(mǎn)足強(qiáng)度要求。
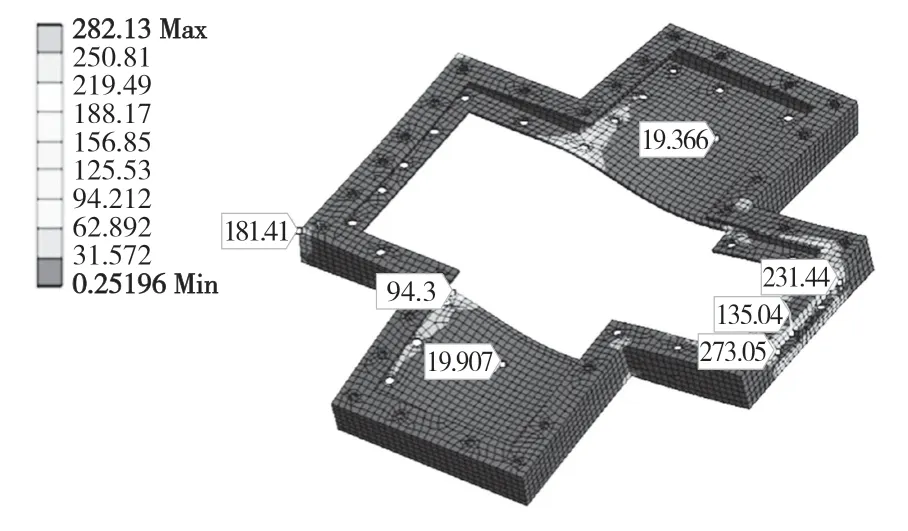
圖4 應(yīng)力云圖Fig.4 Stress nephogram
4 結(jié)語(yǔ)
根據(jù)我國(guó)設(shè)施蔬菜種植生產(chǎn)實(shí)際,針對(duì)葉菜類(lèi)蔬菜收獲的特點(diǎn)與難題,設(shè)計(jì)了一款智能葉菜類(lèi)蔬菜收割機(jī)。本文就行走機(jī)構(gòu)設(shè)計(jì)和機(jī)架受力分析得到如下結(jié)論:
(1)不同于傳統(tǒng)采用變速器的傳動(dòng)機(jī)構(gòu),本設(shè)計(jì)機(jī)器通過(guò)4 個(gè)輪轂電機(jī)驅(qū)動(dòng),能夠?qū)崿F(xiàn)在狹小的棚室空間靈活進(jìn)行轉(zhuǎn)彎和轉(zhuǎn)向。
(2)針對(duì)其中的關(guān)鍵機(jī)構(gòu)即四輪驅(qū)動(dòng)差速轉(zhuǎn)向水平微調(diào)行走機(jī)構(gòu)的設(shè)計(jì)、工作原理進(jìn)行了詳細(xì)闡述,計(jì)算了行走機(jī)構(gòu)工作參數(shù),確定了行走電機(jī)參數(shù):額定電壓24 V,額定輸出功率80 W,額定轉(zhuǎn)速310 r/min,額定扭矩11 N·m,額定電流8.5 A,電機(jī)效率80%。
(3)在蔬菜收割過(guò)程中,四輪驅(qū)動(dòng)差速轉(zhuǎn)向機(jī)構(gòu)能夠根據(jù)地面高低起伏,自動(dòng)調(diào)節(jié)刀架高度,從而控制割茬高度,按收割質(zhì)量要求完成收割。
(4)機(jī)架有限元分析結(jié)果表明:最大應(yīng)力282.13 MPa,發(fā)生在切割臺(tái)連接處和水平微調(diào)機(jī)構(gòu)連接處,機(jī)架滿(mǎn)足強(qiáng)度要求。
