船用防爆型助力液壓搬運車的設計與應用
2022-10-30 12:10:44李金通
機電產(chǎn)品開發(fā)與創(chuàng)新 2022年5期
郭 奎, 李金通, 王 琦
(1.92942 部隊, 北京 100161; 2.91395 部隊, 北京 102401)
0 引言
隨著船舶行業(yè)的快速發(fā)展, 各型船舶上的機械設備也越來越多樣化,部分多用途型船舶在運輸柴油、航空燃料油等物資的同時,也會攜帶小型集裝箱、貨框等形式的物資, 集裝箱或貨框需要由叉車等機械設備進行叉裝運輸、堆垛等,并且,因船上空間有限,對叉車等機械設備的大小也有限制,使其能滿足在小型空間內(nèi)使用,具備能夠原地旋轉(zhuǎn)等功能,又因攜帶了部分油氣資源,在船上某些位置會出現(xiàn)油氣混合區(qū),這樣就會形成防爆區(qū)域。根據(jù)防爆區(qū)域要求,此類防爆區(qū)一般為Ⅱ類防爆區(qū),在此區(qū)域工作的設備要求具備防爆功能。 本文依據(jù)助力液壓搬運車的防爆性能、使用要求等方面的技術要求,進行了分析和設計。
1 組成
根據(jù)船舶上助力液壓搬運車的使用要求,其主要組成由車體、 框架總成、驅(qū)動輪總成、 電氣控制系統(tǒng)、液壓控制系統(tǒng)等組成。 其外形圖見圖1。
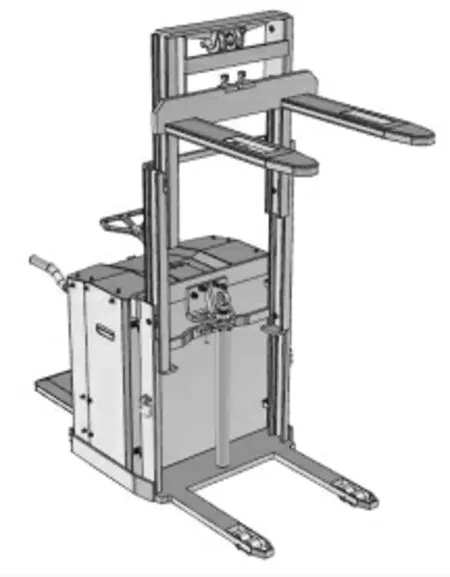
圖1 助力液壓搬運車外形圖
2 設計原理
該型助力液壓搬運車采用電液一體化設計, 采用蓄電池組提供動力源,電機提供動力,電機驅(qū)動液壓泵,液壓泵帶動液壓馬達再驅(qū)動行走輪使搬運車行走, 可實現(xiàn)速度指標內(nèi)的無級變速。 貨叉的起升與降落由液壓控制,推動液壓油缸上下運動升降貨叉和貨物。 操作手柄既是整車行走開關也是轉(zhuǎn)向操作的方向桿。 具有省力、 效率高、運行平穩(wěn)、操作簡單、安全可靠、噪音小,無污染等特點。 其液壓系統(tǒng)和電氣控制系統(tǒng)原理如下:
2.1 液壓系統(tǒng)
叉車行走及提升方式采用液壓驅(qū)動, 液壓系統(tǒng)主要由泵、防爆電磁閥、調(diào)速閥、單向閥、溢流閥、行走馬達、提升油缸液壓管路附件等組成。
液壓系統(tǒng)油源由泵供給,經(jīng)由防爆電磁閥,控制行走馬達、 提升油缸兩種執(zhí)行元件。 為保證裝卸過程工作平穩(wěn),提升油缸安裝調(diào)速閥,控制提升速度調(diào)節(jié),可避免沖擊,有利于保護油缸,提高系統(tǒng)可靠性。
2.2 電氣系統(tǒng)
整車電氣系統(tǒng)主要包括防爆電源控制系統(tǒng)、 防爆蓄電池組、防爆電機控制器、交流防爆電機、防爆防腐操作柱及線束。電源控制系統(tǒng)及電機控制器采用Q235 材質(zhì)防爆殼進行隔離防爆,防爆殼防爆等級滿足2 區(qū)ExdⅡBT4 Gc。 選用3KW 三相交流防爆電機,電機防爆等級滿足2區(qū)ExdⅡBT4 Gc。 啟動及急停操作柱選用防爆操作柱,防爆操作柱防爆等級滿足2 區(qū)ExdⅡCT6 Gc。蓄電池防爆箱和電機內(nèi)均設有溫度傳感器,達到設定保護溫度自動停機。
其中防爆電池組由16 塊單體電池組成,工作方式采用串聯(lián)形式,額定電壓為48V,額定總?cè)萘繛?00AH,由電源管理系統(tǒng)對其進行管理, 電源管理系統(tǒng)主要功能是保障蓄電池組安全的充放電工作。 管理系統(tǒng)可實時監(jiān)測蓄電池組的單體電壓、單體溫度、系統(tǒng)充放電電流,計算蓄電池組剩余容量。當系統(tǒng)出現(xiàn)過壓、欠壓、過溫、過流等非正常情況時,系統(tǒng)報警并同時切斷電池主回路。
助力液壓搬運車的電氣系統(tǒng)、 液壓系統(tǒng)通過多個折彎支架、框架結(jié)構(gòu)實現(xiàn)上述兩個系統(tǒng)與車體的連接,最終為整車提供動力,實現(xiàn)整車行走、轉(zhuǎn)向、轉(zhuǎn)運、舉升、堆碼等功能。 并根據(jù)其防爆性能要求,采用了導靜電輪胎、防爆操作手柄等。
3 分析與計算
助力液壓搬運車在工作過程中, 要承受堆碼的重量,根據(jù)其承載重量對其進行受力分析,結(jié)合助力液壓搬運車的使用環(huán)境,本文分析只針對轉(zhuǎn)彎時的操作受力分析及船舶航行過程中的滿載使用狀態(tài)進行分析計算,航行時滿載狀態(tài)下是助力液壓搬運車使用的極端條件,在該條件下能夠滿足使用要求,則其他情況下也能夠滿足使用要求。
3.1 平面狀態(tài)下滿載時轉(zhuǎn)彎受力分析
計算相關基礎數(shù)據(jù):
車身自重: G=1300kg;
前輪兩輪中心距離:L1=0.7m;
重心偏離中心軸線距離:L2=0.039m;
重心距離地面高度:H=0.4396m;
驅(qū)動輪與前輪中心距:L=1.14m;
最大行駛速度:vmax=0.7m/s;
最大轉(zhuǎn)向角:θ=30°;
對助力液壓搬運車轉(zhuǎn)彎時進行運動分析得, 助力液壓搬運車進行左轉(zhuǎn)向時相比于右轉(zhuǎn)向時更容易發(fā)生側(cè)翻情況,因此對左轉(zhuǎn)向時進行受力分析,受力分析圖見圖2。
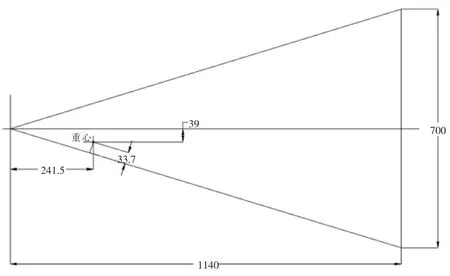
圖2 空載時左轉(zhuǎn)向受力分析圖
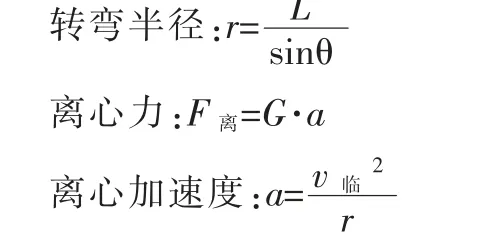
通過受力分析圖分析得, 左轉(zhuǎn)向發(fā)生側(cè)翻的臨界狀態(tài)為內(nèi)側(cè)支撐輪(左前輪)提供的支撐力為0,即F1=0,經(jīng)計算:
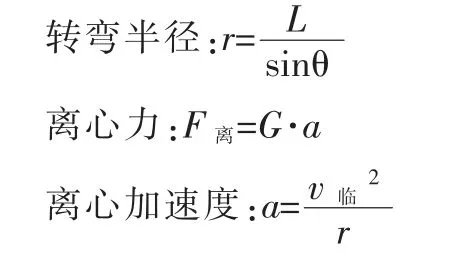
根據(jù)力矩平衡:G·g×0.0337=F離·H;(對外側(cè)支撐輪(右前輪)著地中心點計算力矩)
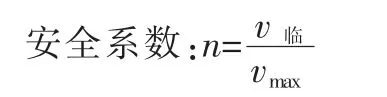
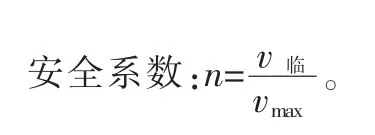
經(jīng)計算得:n=1.8, 因此助力液壓搬運車空載左轉(zhuǎn)彎時不會發(fā)生側(cè)翻,滿足使用要求。
3.2 平面狀態(tài)下滿載時轉(zhuǎn)彎受力分析
對助力液壓搬運車轉(zhuǎn)彎時進行運動分析得,助力液壓搬運車進行左轉(zhuǎn)向時相比于右轉(zhuǎn)向時更容易發(fā)生側(cè)翻情況,因此對左轉(zhuǎn)向時進行受力分析,受力分析圖見圖3。

圖3 滿載時左轉(zhuǎn)向受力分析圖
通過受力分析圖分析得, 左轉(zhuǎn)向發(fā)生側(cè)翻的臨界狀態(tài)為內(nèi)側(cè)支撐輪(左前輪)提供的支撐力為0,即F1=0,經(jīng)計算:
根據(jù)力矩平衡:G·g×0.0337=F離·H;(對外側(cè)支撐輪(右前輪)著地中心點計算力矩)

經(jīng)計算得:n=2.3>1, 因此助力液壓搬運車滿載左轉(zhuǎn)彎時不會發(fā)生側(cè)翻,滿足使用要求。
3.3 船舶航行過程中空載狀態(tài)下的受力分析
助力液壓搬運車在驅(qū)動輪兩側(cè)設計有離地高度為5mm 的萬向軸承,其寬度與前支撐輪寬度相同,在助力液壓搬運車行駛時驅(qū)動輪與一前支撐輪鎖鏈直線為助力液壓搬運車側(cè)翻的傾翻軸線, 此軸線為助力液壓搬運車的一級安全軸線, 萬向軸承與其對應前支撐輪組成的軸線為二級安全軸線,在實際使用過程中,若在二級安全軸線下發(fā)生失穩(wěn),則判定為助力液壓搬運車失穩(wěn)。
在進行空載坡面行駛轉(zhuǎn)彎時發(fā)現(xiàn)一級安全軸線已失穩(wěn),因此對助力液壓搬運車二級安全軸線進行校核。
坡度:α=8.53°;(設計指標要求車輛爬坡度15%,按8.53°計算);對助力液壓搬運車轉(zhuǎn)彎時進行運動分析得,助力液壓搬運車進行左轉(zhuǎn)向時相比于右轉(zhuǎn)向時更容易發(fā)生側(cè)翻情況,因此對左轉(zhuǎn)向時進行受力分析,受力分析圖見圖4。
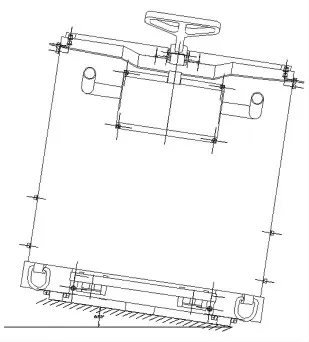
圖4 空載時坡面左轉(zhuǎn)向受力分析圖
通過受力分析圖分析得, 左轉(zhuǎn)向發(fā)生側(cè)翻的臨界狀態(tài)為內(nèi)側(cè)支撐輪提供的支撐力為0,即F1=0,經(jīng)計算:
離心力:F離=G·a

根據(jù)力矩平衡:G·cosα·g·(L2-H·tanα)=F離·H/cosα(對傾翻軸計算力矩)
經(jīng) 計 算 得:n=4.85,因此助力液壓搬運車坡面行駛轉(zhuǎn)彎時不會發(fā)生側(cè)翻,滿足使用要求。
在進行載重作業(yè)時,由于重物使整車重心前移,重力作用力臂增加,重力防止整車傾翻的力矩增加,所載重物對整車穩(wěn)定系統(tǒng)起正作用,即更為穩(wěn)定,因此不進行校核。
3.4 船舶航行過程中滿載狀態(tài)下的受力分析
助力液壓搬運車在驅(qū)動輪兩側(cè)設計有離地高度為5mm 的萬向軸承,其寬度與前支撐輪寬度相同,在助力液壓搬運車行駛時驅(qū)動輪與一前支撐輪鎖鏈直線為助力液壓搬運車側(cè)翻的傾翻軸線, 此軸線為助力液壓搬運車的一級安全軸線, 萬向軸承與其對應前支撐輪組成的軸線為二級安全軸線,在實際使用過程中,若在二級安全軸線下發(fā)生失穩(wěn),則判定為助力液壓搬運車失穩(wěn)。
在進行空載坡面行駛轉(zhuǎn)彎并伴有橫搖時發(fā)現(xiàn)一級安全軸線已失穩(wěn), 因此對助力液壓搬運車二級安全軸線進行校核。
助力液壓搬運車轉(zhuǎn)彎時自身離心加速度:a1
垂直補給所需航速和海況條件下船的橫搖最大角加速度為1.09°/s2、甲板距船底高度8.8m,計算得船橫搖加速度最大為:
a 橫搖=1.09×π÷180×8.8=0.167m/s2
對助力液壓搬運車轉(zhuǎn)彎時進行運動分析得, 助力液壓搬運車進行左轉(zhuǎn)向時相比于右轉(zhuǎn)向時更容易發(fā)生側(cè)翻情況, 因此其坡面行駛轉(zhuǎn)向并考慮船橫搖情況進行側(cè)翻受力分析,受力分析圖見圖5。
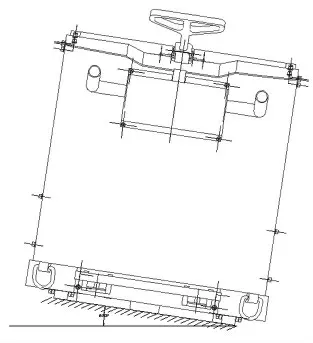
圖5 空載時橫搖下坡面左轉(zhuǎn)向受力分析圖
通過受力分析圖分析得, 右轉(zhuǎn)向發(fā)生側(cè)翻的臨界狀態(tài)為內(nèi)側(cè)支撐輪提供的支撐力為0,即F1=0,經(jīng)計算:
離心力:F離=G·a

根據(jù)力矩平衡:G·cosα·g·(L2-H·tanα)=F離·H/cosα(對外側(cè)支撐輪(右前輪)著地中心點計算力矩)
經(jīng) 計 算 得:n=4.77>1,因此助力液壓搬運車滿載狀態(tài)下在坡面行駛轉(zhuǎn)向并考慮船橫搖情況下不會發(fā)生側(cè)翻,滿足使用要求。
4 試驗驗證
為了驗證設計的可行性和可靠性,在載重1T 集裝箱狀態(tài)下,驗證助力液壓搬運車在滿載狀態(tài)下的下坡試驗,從試驗情況看,試驗狀況良好, 助力液壓搬運車能夠滿足在極限狀態(tài)下船舶航行時滿載的運行、堆碼和載重。并對各個防爆分系統(tǒng)進行防爆性能檢測,防爆技術要求符合2 區(qū)防爆等級要求。
5 結(jié)束語
助力液壓搬運車能夠在小空間內(nèi)使用,且具備防爆、轉(zhuǎn)運和堆碼等功能, 能夠解決現(xiàn)有船舶內(nèi)因空間受限導致無法進行小型物資的轉(zhuǎn)運和堆碼,且能夠原地旋轉(zhuǎn),改善了防爆環(huán)境下小空間范圍內(nèi)物資的轉(zhuǎn)運和堆碼問題。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
科學大眾(2021年9期)2021-07-16 07:02:40
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
金橋(2020年9期)2020-10-27 01:59:44
中學生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
電子制作(2018年18期)2018-11-14 01:48:24
商周刊(2017年17期)2017-09-08 13:08:58
山東工業(yè)技術(2016年15期)2016-12-01 05:31:22
中國衛(wèi)生(2016年2期)2016-11-12 13:22:18
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
