一種用于皮影戲表演的可擴展機器人裝置
2022-10-31 04:01:46廖海燕王婧怡希治遠黃明揚余亞東龐飛
電子制作 2022年18期
廖海燕,王婧怡,希治遠,黃明揚,余亞東,龐飛
(紹興文理學院 數理信息學院, 浙江紹興,312000)
0 引言
皮影戲作為中國首批非物質文化遺產,歷經千年生生不息,但面對日新月異的時代,其傳承之路舉步維艱,近年來我國公開的皮影戲發展動態數據整合顯示,其“模式舊”成為皮影藝術向前發展的最大挑戰。
從國內外研究我們發現,數字化技術現在已經成為一種主流的傳播形式,將皮影藝術與數字化和機械融合,為傳統文化注入新的時代氣息,將傳統皮影的優勢特點與現代的科技相結合,推陳出新,制作出符合當代人們喜聞樂見的新式皮影戲,是未來皮影藝術的發展方向。皮影藝術的數字化我們能挖掘的內容還有很多,可以與數字藝術相結合的內容也有很多。
基于此,在如今科技發展迅速的時代背景下,皮影表演也需要在繼承傳統的基礎上大膽改革創新。本文介紹了一種用于皮影戲表演的可擴展機器人裝置,本設計充分運用了分層指令集等技術,將單片機系統結合滑輪、聯軸器等機械零件設計出了皮影戲表演的機器人裝置。
1 總體設計
該裝置的結構主要由動作編排系統、主從機通信系統、機電控制執行系統三大部分組成。其運作流程如圖1所示,組成框圖如圖2所示。

圖1 運作流程

圖2 系統整體框圖
本系統由兩個24V電源供電,該機器人表演系統啟動后,由秒鐘層控制的獨立指令根據時間軸組合編排至分鐘層或時鐘層,主機接收到計算機編排好的動作指令,將通信模塊觸發后,通過I2C總線進行ATmega芯片系統之間的數據通信和傳遞,最后由電機控制執行系統中的機械零件,帶動影人開始表演。
程序運行完成即表演完成時,整個系統將回到初始狀態,若表演未結束則繼續完成未完成動作。
2 硬件模塊設計
2.1 控制模塊
主控板選取MEGA2560 R3單片機開發板,先確定I2C總線設備掛載,再運行完成各個動作的任務調動,將每個支點任務傳送到子開發板。該單片機是一種集成電路(IC),以ATmega 16U2作為主控芯片,調試信息串口輸出,通過I2C協議進行系統間的通信,核心處理器是AVR,具有先進的RISC體系結構。我們無需額外的編譯器,直接連接電腦USB接口,即可使用IDE進行表演動作的編程、編譯、燒錄,然后將數據送到指定寄存器即可。

圖3 電路原理圖
2.2 通信模塊
采用主從機通信,每個從機控制一個皮影人物的關節,主機通過I2C接口給從機發送控制命令,從而使得控制邏輯清晰,增加或減少關節時只需在主機中添加或刪除相應的程序模塊即可,極大的提高了系統的易用性,增強了系統的適應性和可擴展性。

圖4 主從機控制
2.3 執行模塊
執行部分主要由57mm 2相步進電機組成,該電機具有低溫升和低噪音的優點,該設計主要依靠齒輪傳動和滑輪轉動來實現三個自由度的機械動作。首先每個支點由兩個電機組合調控,分別依靠齒輪以及滑輪傳遞動作,實現左右移動和上下移動;而位于底部的電機控其完成轉身動作,從而實現三個自由度的完美結合;選擇齒輪齒條的傳動,可以使得工作平穩,可靠性高,能保證恒定的傳動比,傳遞任意夾角兩軸間的運動。而其整體的外部框架采用鋁材、鋼材的構成支架結構,在軌道中固定起支撐作用的底座、多個滾輪套件、若干支撐桿以及壓緊螺栓,這樣的結構組合使表演平臺的穩定性得到了進一步提升。

圖5 電機結構
2.4 藍牙模塊
為了增加人物表演的生動性,我們選用XH-A158超清藍牙功放板播放音樂。該藍牙模塊主要由兩塊PAM8403芯片構成,PAM8403是一種D類音頻功率放大器 IC,具有諧波失真低、噪聲串擾小的特點使其對聲音的重放得到較好的音質。連接了兩個5W功率的優質揚聲器,配接合適的皮影戲曲目可以放大4倍的音量并自由調整其節奏,使其與動作匹配。
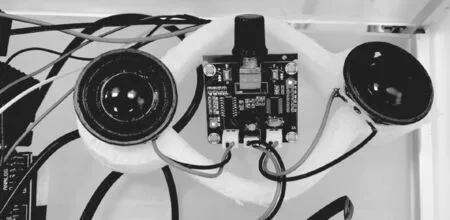
圖6 藍牙模塊
3 軟件控制設計
3.1 分層控制系統
基于分層指令集技術設計皮影戲動作編排系統。指令集分為三層,第一層指令由若干能獨立完成一套動作的指令構成,每個第一層指令又可以分解為若干第二層指令,每個第二層指令都分別可以完成一個獨立動作,每個第二層指令又可以分解為若干第三層令,每個第三層指令控制各個關節(節點)的運動。
3.2 基于ROS機器人操作系統
構建分布式的進程(或稱為節點)框架,每個子節點作為一個進程,向主節點訂閱指令,主節點根據節目內容按時間順序發布指令,控制各個關節協調動作,演繹完美的節目。
3.3 代碼自動生成系統
該系統根據動作編排系統輸出文件自動生成代碼,按時間順序設定各個皮影角色動作,包括動作幅度、持續時間等參數,代碼自動生成系統首先將角色動作指令分解到各第三層,然后將第三層指令分配至各個節點,在此基礎上生成驅動各個節點的代碼。
4 系統創新分析
4.1 動作編排自動化
分層指令集大大降低了軟件的使用難度,使得皮影戲制作人員可以專心進行皮影戲內容創作,無需過多關注皮影角色動作的具體實現方法,同時皮影戲制作人員在編排內容時可以快速觀看皮影角色動作效果并反復改進,大大提高皮影戲制作效率和表演效果。
4.2 機電控制一體化
該機器人系統硬件模塊集開發板、驅動器等機電裝置為一體,只要依靠后臺程序的程序操控,就能智能控制表演全過程,并且該機器人的設備較簡單成本較低,易于推廣使用。
4.3 皮影表演精細化
數字化的機器人表演模式是結合傳統文化與數字科技的新型表演形式,相較于傳統表演需要反復排練才能完成一場皮影戲,該系統通過聯軸器等機械元件揮舞皮影人物,后臺制作人員在編排內容時可以根據需求觀看皮影角色動作效果,無需排練即可精準表演。
5 裝置功能測試與分析
首先計算出人物的轉動角度、動作時間等參數,結合電機的步距角為1.8o進行插值量化,基于MCU微控制器編程技術構建分層指令,將關節數據(如位置、速度信號以及各種通訊信息)轉化得到關節位置變化或轉速,再通過Arduino完成人物角色的動作編排程序,并將程序燒錄到主單片機開發板。
程序燒錄完成后,控制指令依次完成從主機、子機、驅動器到電機的傳遞。開發板和擴展板基于I2C通信協議傳遞數據,每個驅動器接收到該支點的轉動數據后驅動電機,每個步進電機基于電機微分驅動技術以及控制寄存器的設置執行特定功能。
電機驅動器通過PID算法自動控制電機,輔以滑輪、導軌、齒輪等機械零件,在步進電機達到3%高精度的基礎上,由伸縮繩連接滑輪、彈簧連接動作支點人物帶動手部及頭部的位置變換,由剛性聯軸器實現人物整體的旋轉變化,通過以上動作的不斷變化從而完成表演。

圖7 表演系統測試
本裝置通過不斷地將各模塊細化調試,成功地完成了較為完整的皮影戲表演節目測試,其中有自創曲目《猴王戲虎》以及創新曲目《小豬佩奇》等表演。
同時本設計裝置的技術可推廣使用,不僅可以在大型舞臺上實現皮影大幅度的動作變換,而且通過數字化媒體配以唱腔故事,不需要排練就可以避免出現錯誤的動作。
6 結束語
本設計打造演繹皮影劇的可擴展機電控制系統,實現數字化的皮影戲表演,從而提高表演效率。通過智能化的皮影藝術,在科技飛速發展時代,將傳統的地域文化升級,使人們對非遺文化的數字化保護重視起來,走出遺失的困境,實現非物質文化遺產的創新發展和永續傳承,同時爭取將智能化表演模式快速推廣。
本文通過對皮影戲表演機器人裝置系統各功能設計及實現的相關介紹,較完整地闡述了系統從模塊到相關功能實現的過程,并通過對相關表演功能進行測試,表現該系統的整體表演性能較為優良,系統的穩定性和可靠性較高,達到預期的設計目的。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
家庭影院技術(2017年9期)2017-09-26 03:41:45
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41