鍋爐汽包液位控制系統(tǒng)設(shè)計(jì)
2022-10-31 09:43:46毛永康王雪晶董文琦曹玉波
吉林化工學(xué)院學(xué)報(bào) 2022年7期
毛永康,王雪晶,董文琦,曹玉波*
(1.吉林化工學(xué)院 信息與控制工程學(xué)院,吉林 吉林 132022;2.吉林石化公司 合成樹脂廠,吉林 吉林 132021)
汽包作為鍋爐生產(chǎn)過程中重要的蒸發(fā)設(shè)備,其良好的液位控制是工業(yè)生產(chǎn)穩(wěn)定運(yùn)行和產(chǎn)品質(zhì)量保證的關(guān)鍵[1].在運(yùn)行過程中,汽包水位需始終處于程序設(shè)定的安全位置,過高或過低都會(huì)對(duì)鍋爐的運(yùn)行質(zhì)量和安全系數(shù)造成影響.據(jù)統(tǒng)計(jì),約25%的鍋爐事故均由汽包水位異常波動(dòng)引起[2].因此,將汽包水位控制在安全范圍內(nèi),對(duì)鍋爐安全、可靠、經(jīng)濟(jì)地運(yùn)行具有重要意義.
近年來,關(guān)于鍋爐汽包液位的先進(jìn)控制方法不斷被提出,如李一良設(shè)計(jì)了一款基于DCS系統(tǒng)的汽包液位控制系統(tǒng)[3],該系統(tǒng)通過與緊急停車系統(tǒng)的結(jié)合,實(shí)現(xiàn)了汽包的連鎖控制,但對(duì)液位反復(fù)波動(dòng)、調(diào)節(jié)時(shí)間過長等問題未能實(shí)現(xiàn)良好的控制改進(jìn);田剛使用模糊-PID控制器實(shí)現(xiàn)了對(duì)汽包液位超調(diào)量的有效控制[4];袁俊文提出了一種將模糊控制理論與BP神經(jīng)網(wǎng)絡(luò)相結(jié)合的控制方法[5],二者均采用了更為先進(jìn)的模糊控制方案,但仍停留在理論研究階段,無法在PLC和實(shí)際工程中得到廣泛的應(yīng)用.本文基于西門子300-PLC其特有的梯形圖編程指令、豐富的尋址方式和獨(dú)有的FB41數(shù)據(jù)處理模塊,將微分先行算法與PID控制相結(jié)合,設(shè)計(jì)了汽包液位-流量串級(jí)控制系統(tǒng);采用上位機(jī)與下位機(jī)協(xié)同控制的方式,實(shí)現(xiàn)了對(duì)現(xiàn)場數(shù)據(jù)的實(shí)時(shí)顯示、存儲(chǔ)、報(bào)警處理以及參數(shù)的設(shè)定,系統(tǒng)投運(yùn)后,有效改善了液位反復(fù)波動(dòng)和超調(diào)量過大的問題,提高了液位控制的穩(wěn)定性,在實(shí)際工程中取得了良好的控制效果.
1 鍋爐汽水循環(huán)工藝流程及控制要求
鍋爐汽包液位的控制在鍋爐的蒸汽產(chǎn)量、品質(zhì)及降低能耗、安全生產(chǎn)等方面起著重要的作用[6].液位過高,汽水分離裝置受到破壞,影響系統(tǒng)的蒸發(fā)效率;液位過低,造成鍋爐水循環(huán)管的損壞,燒毀汽包.由此可見,汽包液位的穩(wěn)定對(duì)鍋爐高效生產(chǎn)具有十分重要的意義.鍋爐汽水循環(huán)工藝流程如圖1所示,經(jīng)省煤器預(yù)加熱處理后的水進(jìn)入汽包后,由于溫度的不同帶來水的比重也不同,給水在進(jìn)入汽包后先向下移動(dòng)進(jìn)入下降管,流入爐底的下聯(lián)箱,后經(jīng)上升管進(jìn)入水冷壁吸收爐膛的輻熱,在吸收大量的熱量后發(fā)生相變形成汽水混合物進(jìn)入汽包,在汽包內(nèi)進(jìn)行水汽分離[7],分離出的飽和蒸汽經(jīng)過過熱器形成過熱蒸汽送往生產(chǎn)負(fù)荷設(shè)備進(jìn)行供能,分離出的水回到汽包進(jìn)行下次循環(huán).液位PID控制為主回路,流量PID控制為副回路.其中,主回路設(shè)置汽包液位控制器,其輸出與蒸汽流量變送值共同作為副控制器的輸入給定值;副控制器設(shè)置進(jìn)水流量控制器,其輸出作用于進(jìn)水調(diào)節(jié)閥的開度值.
2 汽包液位三沖量控制方案及控制算法設(shè)計(jì)
2.1 三沖量控制方案
汽包液位控制的目的是克服蒸汽負(fù)荷變化等擾動(dòng)作用對(duì)液位的影響,維持汽包液位在允許的范圍內(nèi)變化.目前在工業(yè)汽包液位控制系統(tǒng)中,針對(duì)不同的控制信號(hào)衍生出了單沖量、雙沖量和三沖量控制系統(tǒng).
鍋爐作為一個(gè)多輸入多輸出、相互關(guān)聯(lián)性強(qiáng)且具有非線性和時(shí)間滯后的系統(tǒng)[8-9],若采用普通單沖量單回路控制,無法改善“虛假液位”現(xiàn)象和進(jìn)水量突變帶來的影響,而三沖量控制是在雙沖量的基礎(chǔ)上加入進(jìn)水流量控制信號(hào),組成雙閉環(huán)控制系統(tǒng),其優(yōu)點(diǎn)不僅可以有效克服“虛假液位”現(xiàn)象,對(duì)進(jìn)水?dāng)_動(dòng)也起到了快速調(diào)節(jié)的作用,維持了汽包液位的穩(wěn)定.為了可以有效控制內(nèi)部和外部干擾對(duì)液位帶來的影響,此次系統(tǒng)首先構(gòu)建了流量副控制器消除系統(tǒng)內(nèi)部進(jìn)水流量的干擾,之后以液位主控制器的輸出作為流量副控制器輸入的給定值,使流量控制器按照汽包液位高度的要求進(jìn)行工作,同時(shí)將蒸汽流量信號(hào)引入到系統(tǒng)的前饋控制環(huán)節(jié)當(dāng)中,由此構(gòu)成了三沖量液位-流量串級(jí)控制系統(tǒng),如圖2所示.
在系統(tǒng)穩(wěn)定時(shí),汽包液位值不變,主調(diào)節(jié)器的輸出不變,流量調(diào)節(jié)器僅會(huì)按副回路測量值和給定值進(jìn)行比較調(diào)節(jié),控制進(jìn)水調(diào)節(jié)閥的開度,使汽包液位向設(shè)定高度調(diào)節(jié).
當(dāng)汽包液位發(fā)生變化時(shí),主調(diào)節(jié)器不斷改變副調(diào)節(jié)器的輸入值,副調(diào)節(jié)器按照設(shè)定值和現(xiàn)場實(shí)際值進(jìn)行比較并輸出控制調(diào)節(jié)閥的開度,直到汽包液位重新穩(wěn)定到設(shè)定值為止.
2.2 微分先行-PID控制算法
主控制器以偏差作為輸入,采用PID控制算法,其比例、積分環(huán)節(jié)輸入信號(hào)為:
E1(k)=R(k)-H(k),
(1)
微分部分采用微分先行算法,其微分環(huán)節(jié)輸入信號(hào)為:
ΔH(k)=H(k)-H(k-1),
(2)
式中,E1(k)為采樣時(shí)刻主回路液位高度偏差;R(k)為采樣時(shí)刻主回路液位設(shè)定值;H(k)為采樣時(shí)刻主回路液位實(shí)際值;H(k-1)為上一采樣時(shí)刻主回路液位實(shí)際值;ΔH(k)為液位高度變化量.PLC系統(tǒng)采用循環(huán)掃描、順序執(zhí)行的工作方式,本次采樣周期控制器輸出值與上一采樣周期控制器輸出值作差值運(yùn)算處理,可得第k次主控制器增量為:
ΔU1(k)=Kp1[E1(k)-E1(k-1)]+Ki1E1(k)+ΔUd1(k),
(3)
其中:
式中,Kp1為主回路比例系數(shù);Ki1=Kp1/Ti為主回路積分系數(shù);Kd1=Kp1·Td為主回路微分系數(shù),γ為增益系數(shù),γ<1.
整理公式(1)~(3)可得液位控制器輸出:
U1(k)=ΔU1(k)+U1(k-1).
(4)
3 汽包液位控制系統(tǒng)設(shè)計(jì)與應(yīng)用
3.1 上位機(jī)操作畫面設(shè)計(jì)
本次監(jiān)控系統(tǒng)采用西門子公司的WinCC7.0組態(tài)軟件設(shè)計(jì)了人機(jī)接口畫面,能夠監(jiān)控系統(tǒng)的工作狀態(tài)以及檢測儀表的參數(shù)反饋信息等.整個(gè)監(jiān)控系統(tǒng)主要由工藝流程總畫面、參數(shù)設(shè)置畫面、歷史曲線畫面組成[10].
汽包液位控制系統(tǒng)中電氣設(shè)備主要由一臺(tái)循環(huán)泵和一個(gè)調(diào)節(jié)閥構(gòu)成[11],由現(xiàn)場操作人員進(jìn)行啟動(dòng)控制,在監(jiān)控畫面內(nèi)可以觀測系統(tǒng)的運(yùn)行狀態(tài)和調(diào)節(jié)閥開度大小.系統(tǒng)投入自動(dòng)運(yùn)行后,給水調(diào)節(jié)閥持續(xù)產(chǎn)生作用使汽包內(nèi)液位穩(wěn)定在要求范圍70~85 cm內(nèi),監(jiān)控畫面實(shí)時(shí)顯示系統(tǒng)運(yùn)行數(shù)據(jù).當(dāng)故障發(fā)生時(shí),給水泵由程序控制持續(xù)運(yùn)轉(zhuǎn),保證汽包內(nèi)水量充足,在自動(dòng)或者手動(dòng)模式下,操作人員可以在畫面中對(duì)設(shè)備進(jìn)行急停控制,保證生產(chǎn)安全,如圖3所示.
系統(tǒng)操作畫面具有顯示、查詢、報(bào)警及報(bào)表等功能.在參數(shù)設(shè)定畫面中,可根據(jù)工藝需求以及系統(tǒng)的運(yùn)行情況,設(shè)置控制器參數(shù),對(duì)液位和流量等參數(shù)設(shè)置報(bào)警限值;趨勢曲線畫面,以曲線方式實(shí)時(shí)顯示液位和流量等參數(shù)信息變化趨勢,便于觀察參數(shù)的實(shí)際情況;利用報(bào)表功能,可以記錄現(xiàn)場生產(chǎn)過程中數(shù)據(jù)的變化情況,根據(jù)需求查詢、打印歷史信息.
3.2 下位機(jī)控制程序設(shè)計(jì)
3.2.1 三沖量控制程序
汽包液位信號(hào)、蒸汽流量信號(hào)和給水流量信號(hào)共同組成了汽包液位控制系統(tǒng)的三沖量.蒸汽流量信號(hào)和主控制器輸出U1作為副控制器FIC103的給定值,與給水流量信號(hào)作差值運(yùn)算得到系統(tǒng)偏差E2,通過FB41模塊計(jì)算后輸出控制信號(hào)U2,經(jīng)模擬量輸出模塊轉(zhuǎn)化為電信號(hào)對(duì)調(diào)節(jié)閥進(jìn)行控制,調(diào)節(jié)給水流量,實(shí)現(xiàn)液位的定值控制[12].汽包液位三沖量控制程序如圖4所示.
3.2.2 微分先行-PID控制器實(shí)現(xiàn)
在PLC控制程序中,采用微分先行-PID控制算法進(jìn)行LIC103主控模塊的設(shè)計(jì).將汽包液位設(shè)定值與測量值的偏差E1,作為控制器比例環(huán)節(jié)和積分環(huán)節(jié)的輸入信號(hào),微分環(huán)節(jié)采用微分先行算法只對(duì)輸出量微分而不對(duì)輸入量微分的控制結(jié)構(gòu),將液位增量值ΔH(k)作為微分環(huán)節(jié)的輸入信號(hào),經(jīng)PLC運(yùn)算后得到控制量信號(hào)U1.微分先行-PID控制器程序如圖5所示.
3.3 汽包液位控制系統(tǒng)應(yīng)用
傳統(tǒng)PID控制與微分先行-PID控制效果對(duì)比曲線如圖6所示.
系統(tǒng)運(yùn)行過程中,隨著輸入量的變化要求,系統(tǒng)脫離了原來的穩(wěn)定狀態(tài),通過觀察,常規(guī)PID和微分先行-PID控制都能調(diào)節(jié)至系統(tǒng)穩(wěn)定,但微分先行-PID控制在跟蹤設(shè)定值階躍變化時(shí)的響應(yīng)速度更快,控制輸入信號(hào)(給水流量)的調(diào)節(jié)更為迅速.由表1實(shí)驗(yàn)分析對(duì)比可知,微分先行算法的應(yīng)用不僅降低了系統(tǒng)的超調(diào)量,減少了系統(tǒng)的過渡時(shí)間,并且有效改善了調(diào)節(jié)過程中液位波動(dòng)的問題,使系統(tǒng)的整體控制效果優(yōu)于常規(guī)PID控制.
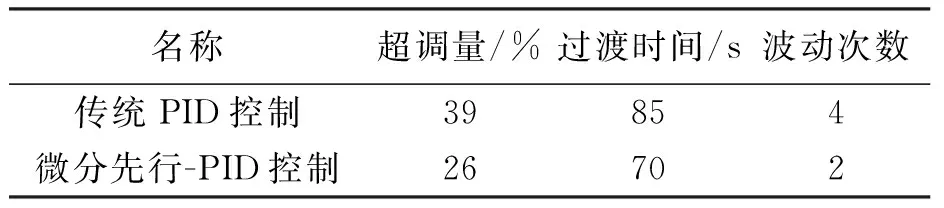
表1 實(shí)驗(yàn)分析對(duì)比
4 結(jié) 論
本文在鍋爐汽包液位控制系統(tǒng)中,選用西門子S7-300 PLC作為控制核心,在PID單回路的基礎(chǔ)上,結(jié)合微分先行控制算法設(shè)計(jì)了液位-流量串級(jí)PID控制系統(tǒng),改善了液位反復(fù)波動(dòng)和超調(diào)量過大的問題,提高了系統(tǒng)的穩(wěn)定性和快速性.利用WinCC組態(tài)軟件組建了人機(jī)交互畫面,對(duì)現(xiàn)場數(shù)據(jù)的集中監(jiān)控和操作控制提供了幫助.系統(tǒng)投運(yùn)后穩(wěn)定運(yùn)行,減輕了工作人員的勞動(dòng)強(qiáng)度,提升了系統(tǒng)的抗干擾能力,人機(jī)交互畫面良好,汽包液位穩(wěn)定在安全范圍內(nèi).
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
測控技術(shù)(2018年9期)2018-11-25 07:45:00
石油化工自動(dòng)化(2018年5期)2018-11-14 02:34:30
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
