自動(dòng)化集裝箱碼頭平面與工藝總體布局現(xiàn)狀與發(fā)展趨勢(shì)
2022-11-01 05:34:52麥宇雄
水運(yùn)工程 2022年10期
關(guān)鍵詞:作業(yè)
麥宇雄,劉 洋,梁 浩
(中交第四航務(wù)工程勘察設(shè)計(jì)院有限公司,廣東 廣州 510290)
自動(dòng)化集裝箱碼頭的發(fā)展已經(jīng)歷了近30年[1],在降低碼頭人力成本、實(shí)現(xiàn)環(huán)保低碳、提升港口品牌形象等方面發(fā)揮重要作用,是未來港口發(fā)展的必然趨勢(shì),但在加快新建、改造自動(dòng)化集裝箱碼頭的進(jìn)程方面仍存在困難,主要存在3方面突出矛盾:1)目前自動(dòng)化碼頭的數(shù)量占所有碼頭的比例只有5%,初期建設(shè)投資高阻擋了部分小型企業(yè)發(fā)展自動(dòng)化的進(jìn)程;2)港區(qū)自然條件、集疏運(yùn)形式、運(yùn)營(yíng)業(yè)務(wù)模式等應(yīng)用場(chǎng)景的不同,鑄就了每一個(gè)自動(dòng)化集裝箱碼頭都值得擁有自己的“個(gè)性化”,單一技術(shù)路線無法滿足自動(dòng)化集裝箱碼頭個(gè)性化的“私人訂制”服務(wù)需求;3)現(xiàn)存在營(yíng)的傳統(tǒng)集裝箱碼頭自動(dòng)化改造技術(shù)仍有待突破。
隨著新一輪科技革命和產(chǎn)業(yè)變革加速演進(jìn),自動(dòng)控制、人工智能、視覺計(jì)算、智能化分配、無線通訊、自動(dòng)導(dǎo)航定位、自動(dòng)識(shí)別、新能源供電等新科技的發(fā)展推動(dòng)國內(nèi)智能制造業(yè)、裝備業(yè),將新型裝卸與運(yùn)輸設(shè)備應(yīng)用于港口碼頭,再結(jié)合一系列技術(shù)多樣性、普適性、突破性的平面總體布局,以適應(yīng)國內(nèi)外港口的不同應(yīng)用場(chǎng)景需求,在多樣性平面總體布局、新型裝卸設(shè)備升級(jí)等方面探討自動(dòng)化集裝箱碼頭的發(fā)展現(xiàn)狀與趨勢(shì),進(jìn)一步推動(dòng)港口逐步向工業(yè)化、智能化、綠色化和產(chǎn)業(yè)化轉(zhuǎn)型升級(jí)。
1 自動(dòng)化碼頭平面總體布局的發(fā)展現(xiàn)狀與趨勢(shì)
自動(dòng)化集裝箱碼頭平面總體布局是平面布置與工藝系統(tǒng)技術(shù)高度融合的綜合性體現(xiàn),即基于碼頭的吞吐量、船型、集疏運(yùn)及陸域等條件,通過碼頭總平面布置與工藝裝卸系統(tǒng)相互協(xié)調(diào)、相互兼容,形成平面工藝技術(shù)一體化。為了直觀理解自動(dòng)化集裝箱碼頭技術(shù)方案,簡(jiǎn)化描述平面總體布局中包含3個(gè)方面,分別為港區(qū)內(nèi)自動(dòng)化水平運(yùn)輸設(shè)備與外集卡避免同時(shí)混行的隔離方式、堆場(chǎng)布置形式、堆場(chǎng)海側(cè)交互與陸側(cè)交互的形式。自動(dòng)化碼頭發(fā)展進(jìn)程如圖1所示,“平面空間隔離+堆場(chǎng)垂直+兩端交互”總體布局在20世紀(jì)90年代產(chǎn)生于人力資源短缺的歐洲地區(qū),后在亞洲、美洲等地區(qū)廣泛應(yīng)用并提升;近5年來,“側(cè)邊裝卸”平面布局技術(shù)逐步落地推廣使用;隨著智能技術(shù)的不斷發(fā)展,如“立體式”布局等一批新技術(shù)將逐步登上歷史舞臺(tái)。

圖1 世界自動(dòng)化集裝箱碼頭發(fā)展歷程
1.1 厚植優(yōu)勢(shì)的發(fā)展階段
目前,全球已建和在建的近20座全自動(dòng)化碼頭[2]80%以上采用“平面空間隔離+堆場(chǎng)垂直+兩端交互”總體布局,例如荷蘭鹿特丹港ECT、Euromax、德國HHLA-CTA、美國長(zhǎng)灘中港、中國青島前灣、上海洋山四期等碼頭。
碼頭港區(qū)中的前沿作業(yè)地帶與堆場(chǎng)均為相互獨(dú)立的封閉自動(dòng)化裝卸區(qū)域,并且與外集卡完全物理隔離;堆場(chǎng)的箱區(qū)布置采用垂直于碼頭前沿線的形式;港內(nèi)外交互方式采用兩端交互,其中海側(cè)交互區(qū)完成港內(nèi)水平運(yùn)輸設(shè)備與堆場(chǎng)軌道吊交互,陸側(cè)交互區(qū)負(fù)責(zé)堆場(chǎng)軌道吊與外集卡交互。工藝流程如圖2[3]所示。
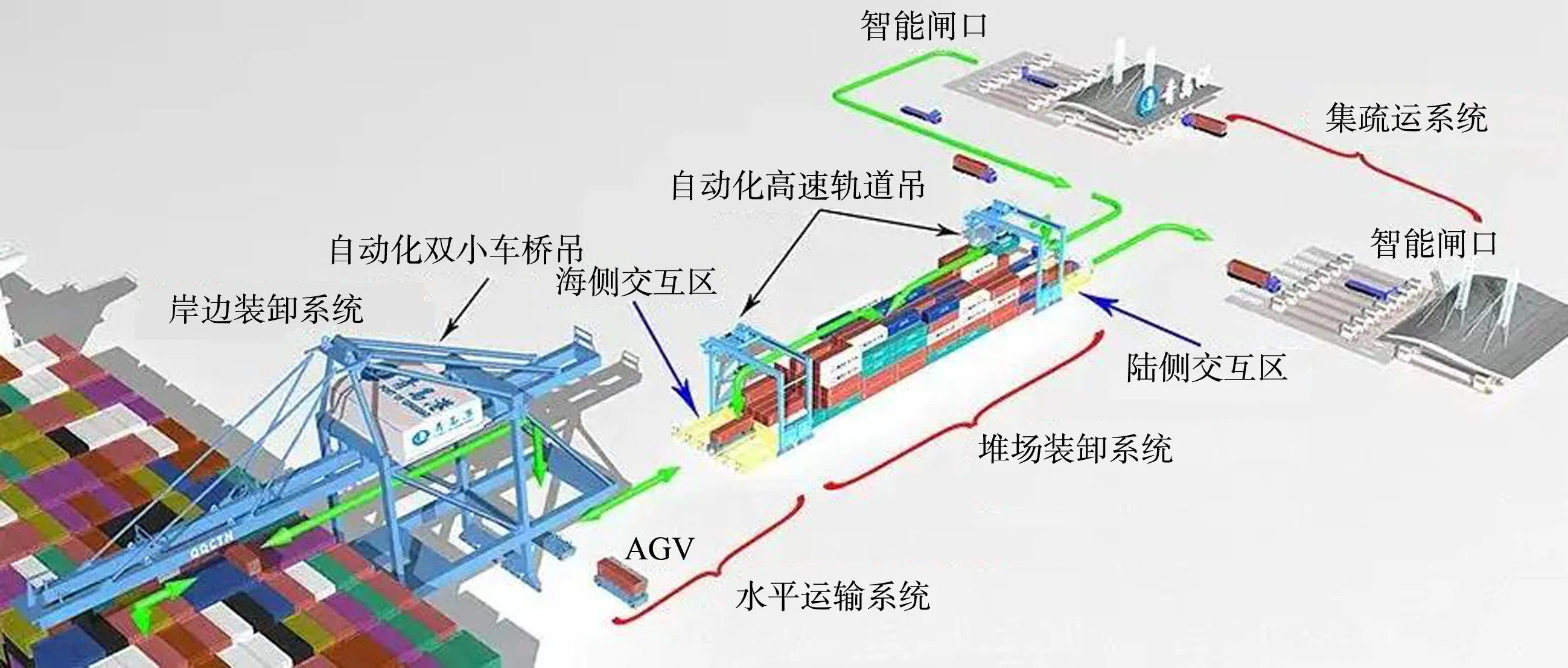
圖2 “平面空間隔離+堆場(chǎng)垂直+兩端交互”工藝流程
在這樣的總體布局中,岸邊裝卸設(shè)備可選用自動(dòng)化雙小車岸橋、自動(dòng)化單小車岸橋,水平運(yùn)輸設(shè)備可以選用智能導(dǎo)引車(IGV)、自動(dòng)導(dǎo)引車(AGV)、跨運(yùn)車(SC),堆場(chǎng)軌道吊采用對(duì)稱接力型高速軌道吊。
此總體布局多應(yīng)用于公路集疏運(yùn)占比高、岸線平順無附屬港池、港區(qū)陸域縱深適中(箱區(qū)長(zhǎng)度一般不超過350 m)的場(chǎng)景。優(yōu)點(diǎn)包括堆場(chǎng)利用率高、港區(qū)自動(dòng)化路徑優(yōu)化算法較為簡(jiǎn)單,有利于保障自動(dòng)化作業(yè)流程的流暢性與高效性。由于采用對(duì)稱接力型高速軌道吊,設(shè)備投資較高且高速軌道吊充當(dāng)堆場(chǎng)水平運(yùn)輸?shù)慕巧\(yùn)營(yíng)期間的能耗較高。
1.2 突飛猛進(jìn)的發(fā)展階段
近年來,以建設(shè)、生產(chǎn)階段均可降本增效為目的,不斷引入人工智能、衛(wèi)星導(dǎo)航、精準(zhǔn)定位、5G通信等前沿科學(xué)技術(shù)在港區(qū)內(nèi)應(yīng)用,促使港口基礎(chǔ)設(shè)施與裝卸設(shè)備領(lǐng)域的不斷升級(jí),涌現(xiàn)出“側(cè)邊裝卸”空間布局新趨勢(shì),特別是針對(duì)智能駕駛L5級(jí)社會(huì)化應(yīng)用的不期而至,“側(cè)邊裝卸”技術(shù)為港內(nèi)外車輛混行預(yù)留了發(fā)展空間,如“時(shí)間隔離+堆場(chǎng)平行+側(cè)邊交互”“空間隔離+堆場(chǎng)平行+側(cè)邊交互”“平面空間隔離+堆場(chǎng)垂直+側(cè)邊交互”等布局,另外“側(cè)邊裝卸”技術(shù)更貼近于傳統(tǒng)集裝箱碼頭的裝卸工藝流程,便于自動(dòng)化改造升級(jí)。
1.2.1“時(shí)間隔離+堆場(chǎng)平行+側(cè)邊交互”總體布局
日本名古屋[4]、天津五洲等碼頭采用的是“時(shí)間隔離+堆場(chǎng)平行+側(cè)邊交互”總體布局。“時(shí)間隔離”是指港內(nèi)自動(dòng)化水平運(yùn)輸設(shè)備與外集卡共用車道時(shí),采用信號(hào)燈管控通行,在時(shí)間上進(jìn)行隔離避免混行的情況;堆場(chǎng)的箱區(qū)布置采用平行于碼頭前沿線的形式;港內(nèi)外交互方式采用側(cè)邊交互,其中港內(nèi)交互是水平運(yùn)輸設(shè)備通過專用車道進(jìn)入堆場(chǎng)內(nèi)與軌道吊點(diǎn)對(duì)點(diǎn)側(cè)邊交互,港外交互是外集卡通過專用通道進(jìn)入堆場(chǎng)內(nèi)與軌道吊點(diǎn)對(duì)點(diǎn)側(cè)邊交互。“時(shí)間隔離”布局如圖3所示。

圖3 “時(shí)間隔離”布局
岸邊裝卸設(shè)備可選用雙小車岸橋、單小車岸橋,水平運(yùn)輸設(shè)備可以選用IGV、AGV、SC,堆場(chǎng)軌道吊采用普通的低速自動(dòng)化雙懸臂軌道吊。
此總體布局適應(yīng)于各種集疏運(yùn)方式且陸域縱深不受限。由于自動(dòng)化水平運(yùn)輸設(shè)備與外集卡均可進(jìn)入港區(qū)且相互隔離互不干擾,實(shí)現(xiàn)堆場(chǎng)內(nèi)“多點(diǎn)”形式的點(diǎn)對(duì)點(diǎn)作業(yè),保證裝卸效率的同時(shí),運(yùn)營(yíng)期間的能耗較低,同時(shí)自動(dòng)化設(shè)備投資也較低,但港區(qū)自動(dòng)化路徑優(yōu)化算法較為復(fù)雜,不利于保障自動(dòng)化作業(yè)流程的流暢性。外集卡專用通道的布置導(dǎo)致堆場(chǎng)利用率較低,適用于陸域充裕的港區(qū)。該總體布局比較適宜于傳統(tǒng)集裝箱碼頭的自動(dòng)化改造。
1.2.2“空間隔離+堆場(chǎng)平行+側(cè)邊交互”總體布局
廣州港南沙港區(qū)四期碼頭[5]采用的是“空間隔離+堆場(chǎng)平行+側(cè)邊交互”總體布局。碼頭港區(qū)中的前沿作業(yè)地帶與堆場(chǎng)形成一個(gè)獨(dú)立的封閉自動(dòng)化裝卸區(qū)域,與外集卡完全物理隔離;堆場(chǎng)的箱區(qū)布置采用平行于碼頭前沿線的形式;關(guān)于港內(nèi)外交互方式采用側(cè)邊交互,其中港內(nèi)交互由水平運(yùn)輸設(shè)備與堆場(chǎng)軌道吊“多點(diǎn)”式的點(diǎn)對(duì)點(diǎn)作業(yè)完成,港外交互由后方設(shè)置的交互專區(qū)軌道吊與外集卡作業(yè)完成。隔離區(qū)域如圖4所示。
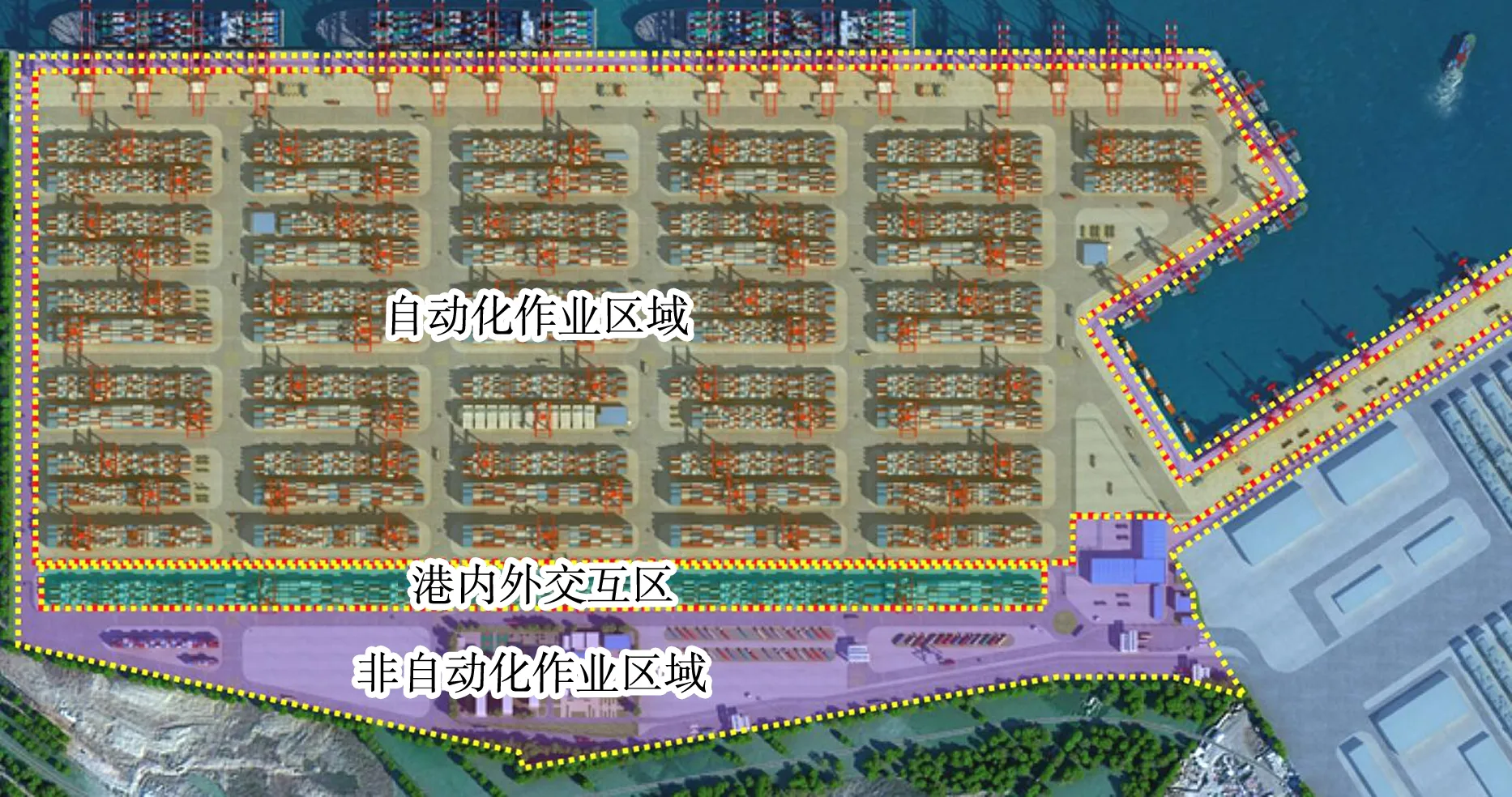
圖4 “空間隔離+堆場(chǎng)平行+側(cè)邊交互”隔離區(qū)域
岸邊裝卸設(shè)備可選用雙小車岸橋、單小車岸橋,水平運(yùn)輸設(shè)備可以選用IGV、AGV、SC,堆場(chǎng)軌道吊采用普通的低速自動(dòng)化單懸臂軌道吊。
此總體布局適應(yīng)于水水中轉(zhuǎn)占比高、岸線不規(guī)則的港區(qū)。由于自動(dòng)化水平運(yùn)輸設(shè)備可進(jìn)入堆場(chǎng),實(shí)現(xiàn)“多點(diǎn)”式的點(diǎn)對(duì)點(diǎn)作業(yè),保證裝卸效率的同時(shí),運(yùn)營(yíng)期間的能耗較低,由于堆場(chǎng)無外集卡專用通道,其堆場(chǎng)利用率高,自動(dòng)化設(shè)備投資也較低,但港區(qū)自動(dòng)化路徑優(yōu)化算法較為復(fù)雜,不利于保障自動(dòng)化作業(yè)流程的流暢性。
1.2.3“平面空間隔離+堆場(chǎng)垂直+側(cè)邊交互”總體布局
目前欽州港大欖坪港區(qū)大欖坪南作業(yè)區(qū)自動(dòng)化碼頭工程采用了“平面空間隔離+堆場(chǎng)垂直+側(cè)邊交互”總體布局,也稱作“U形”堆場(chǎng)垂直布置總體布局。“U形”是指外集卡車輛在堆場(chǎng)中的裝卸行駛車道呈U形,U形車道與堆場(chǎng)箱區(qū)、自動(dòng)化水平運(yùn)輸設(shè)備車道完全隔離;堆場(chǎng)的箱區(qū)采用垂直于碼頭前沿線的布置形式;港內(nèi)外采用側(cè)邊交互方式,其中港內(nèi)交互是水平運(yùn)輸設(shè)備通過專用車道進(jìn)入堆場(chǎng)內(nèi)與軌道吊點(diǎn)對(duì)點(diǎn)側(cè)邊交互,港外交互是外集卡通過U形通道進(jìn)入堆場(chǎng)內(nèi)與軌道吊點(diǎn)對(duì)點(diǎn)側(cè)邊交互。平面布局如圖5所示。

圖5 “平面空間隔離+堆場(chǎng)垂直+側(cè)邊交互”平面布局
岸邊裝卸設(shè)備可選用雙小車岸橋、單小車岸橋,水平運(yùn)輸設(shè)備可以選用IGV、AGV、SC,堆場(chǎng)軌道吊采用普通的低速自動(dòng)化雙懸臂軌道吊。
此總體布局適用于集疏運(yùn)方式多、陸路集疏運(yùn)比例高、陸域縱深大、集中到港突出的場(chǎng)景。由于自動(dòng)化水平運(yùn)輸設(shè)備與外集卡均可進(jìn)入港區(qū)且相互隔離互不干擾,實(shí)現(xiàn)堆場(chǎng)內(nèi)“多點(diǎn)”式的點(diǎn)對(duì)點(diǎn)作業(yè),保證裝卸效率的同時(shí),運(yùn)營(yíng)期間的能耗較低,同時(shí)自動(dòng)化設(shè)備投資較低,另外港區(qū)自動(dòng)化路徑優(yōu)化算法較為簡(jiǎn)單,有利于保障自動(dòng)化作業(yè)流程的流暢性與高效性。U形通道布置的堆場(chǎng)利用率較低,適用于陸域充裕的港區(qū)。
1.3 未來可期的發(fā)展布局
國內(nèi)外均提出了港口發(fā)展戰(zhàn)略構(gòu)想,共通點(diǎn)是從“土地資源集約化、集疏運(yùn)多級(jí)化、港產(chǎn)城融合化、探索智慧化”等方面進(jìn)行技術(shù)提升與高質(zhì)量發(fā)展,孵化出“立體式”空間布局的研究與應(yīng)用,如“立體倉儲(chǔ)式”“立體軌道式”等總體布局可緩解港區(qū)用地緊張的問題,并引入社會(huì)商業(yè)增值服務(wù)。
1.3.1“立體倉儲(chǔ)式”總體布局
這是一種用于存儲(chǔ)集裝箱的新型全自動(dòng)集裝箱智能堆場(chǎng)(貨架)系統(tǒng),國際港口運(yùn)營(yíng)公司 DP World在阿聯(lián)酋Jebel Ali碼頭安裝了首個(gè)能容納800個(gè)集裝箱的“Boxbay”垂直存儲(chǔ)系統(tǒng),其優(yōu)勢(shì)為配備的機(jī)器人起重機(jī)可以隨時(shí)提取任何一個(gè)集裝箱,無需重新堆放,這種創(chuàng)新和顛覆性的技術(shù)不僅增加了碼頭的裝卸量和集裝箱存儲(chǔ)容量,也使碼頭朝著可持續(xù)發(fā)展邁出了更遠(yuǎn)的一步,但是目前系統(tǒng)仍處于單級(jí)貨架的初級(jí)測(cè)試階段,仍需要大量的持續(xù)性測(cè)試。模型如圖6所示。

圖6 “立體倉儲(chǔ)式”模型
1.3.2“立體軌道式”總體布局
“立體軌道式”總體布局[6]包含兩大運(yùn)輸系統(tǒng),包括碼頭前沿立體軌道水平運(yùn)輸系統(tǒng)、立體集裝箱堆場(chǎng)裝卸系統(tǒng)。碼頭前沿立體軌道水平運(yùn)輸系統(tǒng)由緊靠岸橋陸側(cè)軌道并與之平行布置的兩層縱向軌道、與兩層縱向軌道垂直并分別無縫平接兩層橫移軌道以及字母軌道車和集裝箱中轉(zhuǎn)站組成。立體集裝箱堆場(chǎng)裝卸系統(tǒng)間隔設(shè)置于各箱區(qū)之間的基礎(chǔ)及軌道梁上,由平行于碼頭岸線布置的高架天車、穿梭轉(zhuǎn)載平臺(tái)、低架天車組成。
隨著自動(dòng)化集裝箱碼頭技術(shù)的不斷發(fā)展,仍會(huì)有更多樣性的總體路線不斷涌現(xiàn)。
2 主要裝卸工藝設(shè)備發(fā)展現(xiàn)狀與趨勢(shì)
2.1 碼頭前沿作業(yè)設(shè)備的發(fā)展
自動(dòng)化集裝箱碼頭前沿作業(yè)一般采用岸橋,其自動(dòng)化技術(shù)目前已發(fā)展到了相對(duì)成熟的階段,根據(jù)結(jié)構(gòu)形式和工作原理的不同,自動(dòng)化岸橋可分為自動(dòng)化單小車岸橋和自動(dòng)化雙小車岸橋兩種機(jī)型,如圖7所示。世界第一個(gè)自動(dòng)化集裝箱碼頭荷蘭鹿特丹ECT碼頭采用單小車岸橋作業(yè),其具有質(zhì)量輕、對(duì)碼頭結(jié)構(gòu)承載力要求低、設(shè)備單價(jià)低、作業(yè)能耗低等優(yōu)點(diǎn),但該設(shè)備對(duì)碼頭前沿自動(dòng)化和非自動(dòng)化作業(yè)區(qū)的區(qū)分、部分特殊操作流程的設(shè)計(jì)及安全性保障措施都有更高的要求。21世紀(jì)初,隨著船舶大型化和自動(dòng)控制技術(shù)的發(fā)展,自動(dòng)化雙小車岸橋應(yīng)運(yùn)而生,從德國HHLA-CTA碼頭開始,到鹿特丹Euromax碼頭、RWG碼頭、國內(nèi)的青島前灣、洋山四期等典型自動(dòng)化碼頭,均采用自動(dòng)化雙小車岸橋作業(yè),該設(shè)備通過機(jī)身集裝箱中轉(zhuǎn)平臺(tái)和雙小車機(jī)構(gòu),實(shí)現(xiàn)了主副小車的接力作業(yè),有效縮短了主小車循環(huán)作業(yè)時(shí)間,提高了集裝箱在船岸間的轉(zhuǎn)運(yùn)效率,但該設(shè)備質(zhì)量大、對(duì)碼頭結(jié)構(gòu)承載能力要求高、設(shè)備單價(jià)較高。
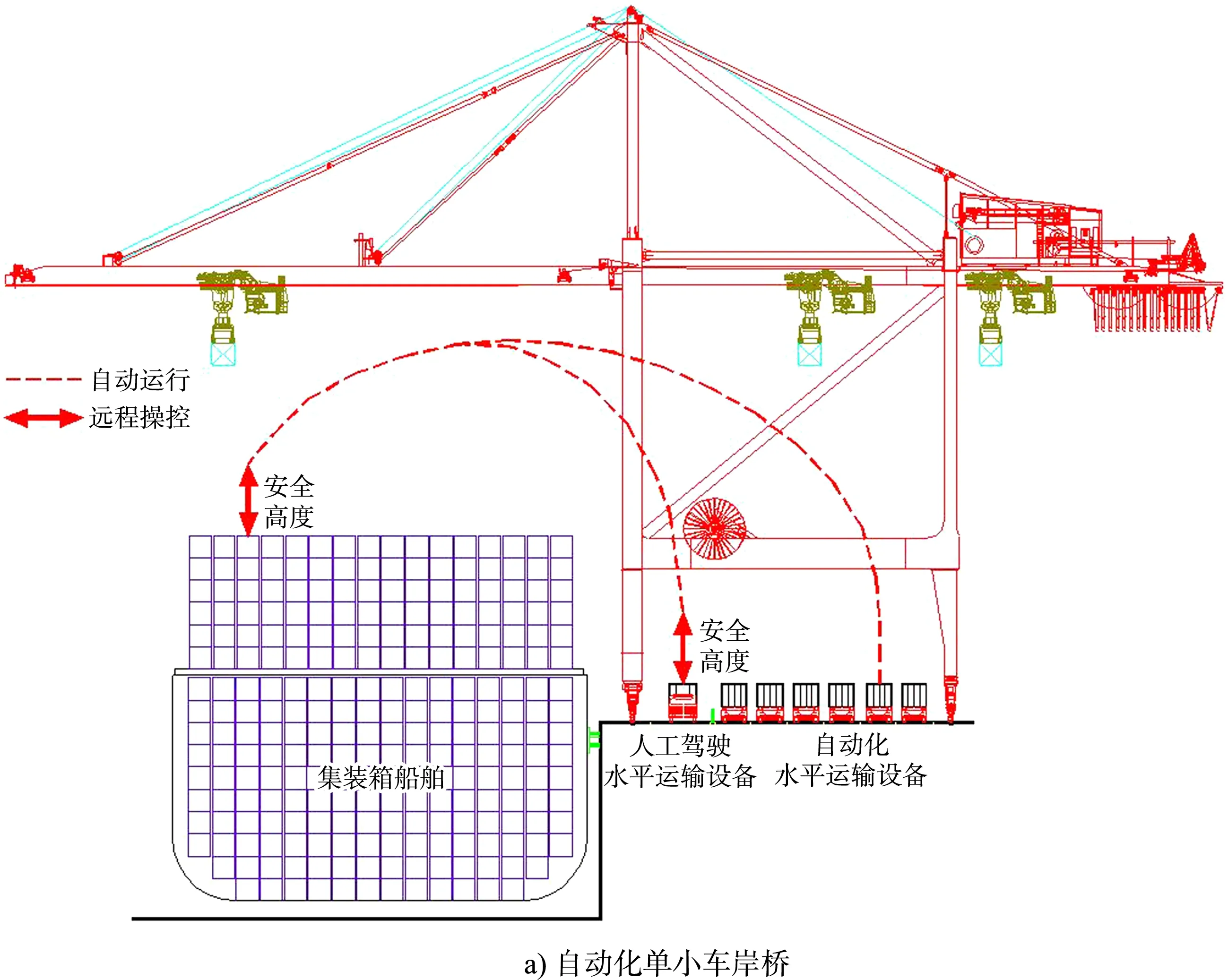
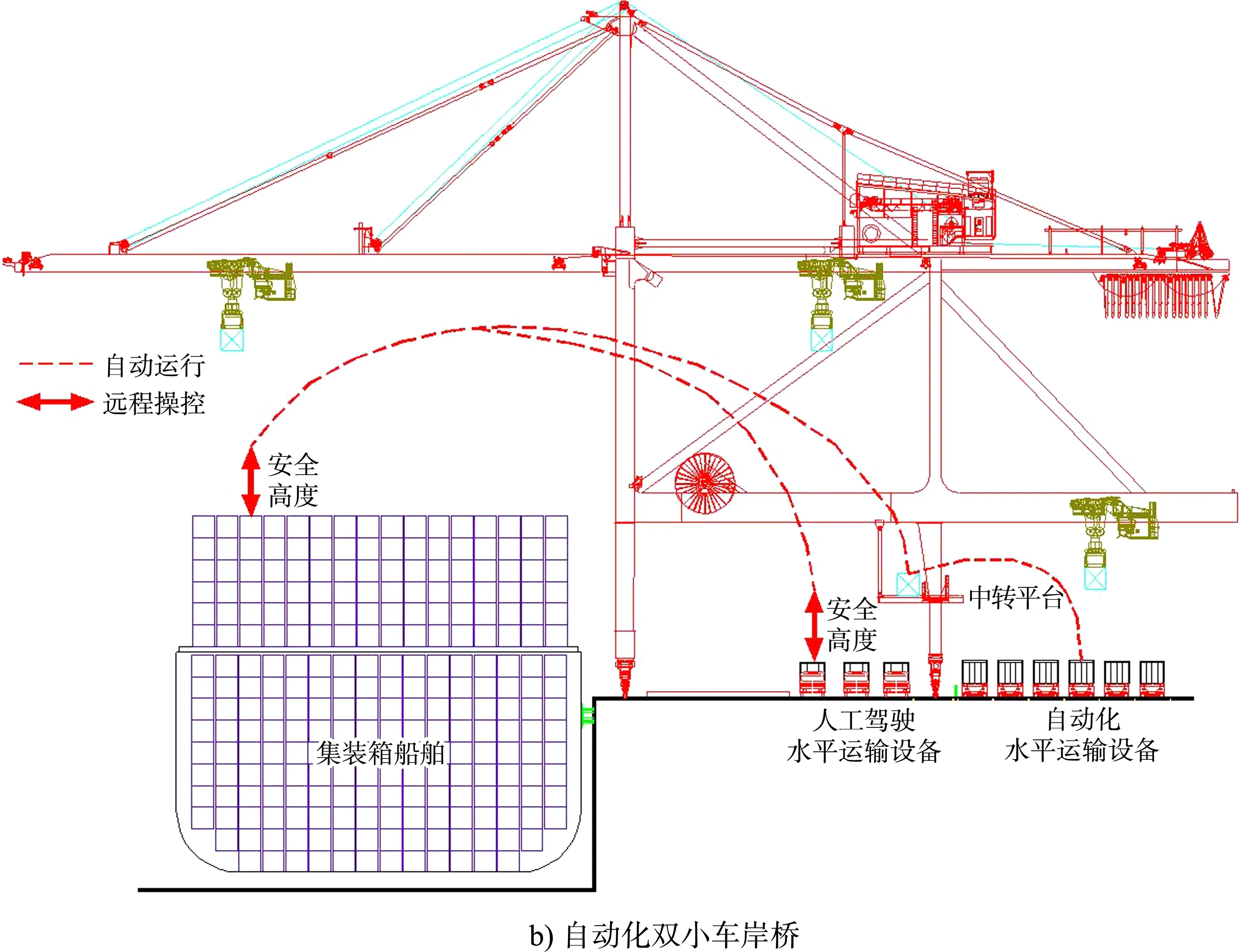
圖7 自動(dòng)化單小車和雙小車岸橋操作模式
自動(dòng)化雙小車岸橋在已建自動(dòng)化集裝箱碼頭中已得到廣泛應(yīng)用,隨著智能水平運(yùn)輸設(shè)備的更新迭代以及自動(dòng)化拆裝扭鎖技術(shù)的發(fā)展,使人機(jī)隔離等安全問題得到有效解決。自動(dòng)化單小車岸橋在成本、能耗方面的優(yōu)勢(shì)突出,在廣州南沙四期、天津北疆C段等自動(dòng)化碼頭中已得到成功應(yīng)用。特別是在傳統(tǒng)集裝箱碼頭的自動(dòng)化改造升級(jí)過程中,由于受碼頭結(jié)構(gòu)、空間布局等因素的制約,自動(dòng)化單小車岸橋?qū)⒌玫竭M(jìn)一步的推廣應(yīng)用。
2.2 堆場(chǎng)作業(yè)設(shè)備的發(fā)展現(xiàn)狀與趨勢(shì)
自動(dòng)化集裝箱堆場(chǎng)作業(yè)設(shè)備主要有自動(dòng)化輪胎龍門吊(ARTG)和自動(dòng)化軌道龍門吊(ARMG)兩種形式。其中ARTG采用橡膠輪胎,容易產(chǎn)生形變,運(yùn)行過程中容易跑偏,其大車定位、自動(dòng)通信等技術(shù)相對(duì)復(fù)雜,只有日本名古屋Tobishima碼頭等少數(shù)自動(dòng)化碼頭采用該類型設(shè)備。ARMG大車沿固定軌道行駛,大車定位精確且較容易實(shí)現(xiàn)自動(dòng)化控制,已廣泛應(yīng)用于已建自動(dòng)化集裝箱碼頭。ARMG根據(jù)結(jié)構(gòu)形式不同可分為無懸臂ARMG和帶懸臂ARMG,ARMG的選型與堆場(chǎng)的布局方式密切相關(guān),早期大多數(shù)自動(dòng)化碼頭采用端裝卸、無懸臂高速ARMG接力作業(yè)的堆場(chǎng)垂直布局方式,便于自動(dòng)化堆場(chǎng)的封閉管理和交通組織,但存在出箱點(diǎn)集中、能耗較高、易造成海陸側(cè)設(shè)備利用率不均衡等問題。而懸臂式ARMG無需帶箱行走,由水平運(yùn)輸設(shè)備帶箱進(jìn)入ARMG懸臂下進(jìn)行邊裝卸作業(yè),在降低能耗的同時(shí)可增加堆場(chǎng)的出箱點(diǎn),適用于堆場(chǎng)垂直布局和平行布局等多種方式。
懸臂式ARMG在洋山四期、欽州大欖坪等自動(dòng)化碼頭的成功應(yīng)用,以及自動(dòng)化碼頭總體布局技術(shù)路線多樣性的發(fā)展,更多的自動(dòng)化碼頭可根據(jù)陸域條件、集疏運(yùn)特點(diǎn)選擇合適的ARMG機(jī)型。對(duì)于絕大多數(shù)采用輪胎龍門吊(RTG)作業(yè)的傳統(tǒng)集裝箱碼頭,隨著智能駕駛和ARTG自動(dòng)化技術(shù)的發(fā)展成熟,其自動(dòng)化改造也是必然趨勢(shì)。
2.3 水平運(yùn)輸設(shè)備的發(fā)展現(xiàn)狀與趨勢(shì)
目前集裝箱自動(dòng)化水平運(yùn)輸設(shè)備主要有:自動(dòng)導(dǎo)引車(AGV)、智能導(dǎo)引車(IGV)、無人駕駛集卡、自動(dòng)跨運(yùn)車(ASHC)等,前三者的應(yīng)用較多。在其他新型自動(dòng)化水平運(yùn)輸設(shè)備應(yīng)用前,AGV一直是自動(dòng)化水平運(yùn)輸設(shè)備的首選。IGV是近年來隨著無人駕駛技術(shù)發(fā)展而誕生的,車身結(jié)構(gòu)更加輕量化,搭載了多傳感器融合導(dǎo)航定位系統(tǒng),在降低單機(jī)成本和碼頭配套基礎(chǔ)設(shè)施建設(shè)成本的同時(shí),提升了環(huán)境感知能力和規(guī)劃決策能力,對(duì)不同形態(tài)的自動(dòng)化堆場(chǎng)具備更好的適應(yīng)性,如圖8所示。無人駕駛集卡是在傳統(tǒng)集卡上加裝視覺相機(jī)、激光雷達(dá)、毫米波雷達(dá)和其他傳感器,并搭載自動(dòng)駕駛計(jì)算平臺(tái)和車隊(duì)管理系統(tǒng),從而實(shí)現(xiàn)集卡的無人駕駛,目前已在部分自動(dòng)化集裝箱碼頭改造項(xiàng)目中應(yīng)用,具有設(shè)備成本低、應(yīng)用場(chǎng)景廣等優(yōu)點(diǎn),是國內(nèi)外科技公司和港口研究的重點(diǎn)方向,如圖9所示。

圖8 IGV

圖9 無人駕駛集卡
現(xiàn)階段受制于無人駕駛技術(shù)和相關(guān)法律法規(guī)的制約,通常使用時(shí)空隔離和交通管制的方式將有人和無人設(shè)備分開作業(yè),隨著相關(guān)技術(shù)的發(fā)展成熟和法律法規(guī)的完善,混行作業(yè)的可靠性和安全性得到實(shí)質(zhì)性提升,將進(jìn)一步推動(dòng)多種自動(dòng)化水平運(yùn)輸設(shè)備的應(yīng)用和傳統(tǒng)自動(dòng)化碼頭的升級(jí)改造。
3 結(jié)語
1)由于自動(dòng)化集裝箱碼頭具有“個(gè)性化”特點(diǎn),其實(shí)施路徑屬于“私人訂制”服務(wù),決定了總體布局呈多樣性、普適性、突破性發(fā)展。
2)隨著新一輪科技革命和產(chǎn)業(yè)變革加速演進(jìn),以建設(shè)、生產(chǎn)階段均可降本增效為目的,不斷引入人工智能、衛(wèi)星導(dǎo)航、精準(zhǔn)定位、5G通信等前沿科學(xué)技術(shù)在港區(qū)內(nèi)應(yīng)用,涌現(xiàn)出“側(cè)邊裝卸”空間布局新趨勢(shì),特別是針對(duì)智能駕駛L5級(jí)社會(huì)化應(yīng)用的不期而至,“側(cè)邊裝卸”技術(shù)為港內(nèi)外車輛混行預(yù)留了發(fā)展空間。
3)在“土地資源集約化、集疏運(yùn)多級(jí)化、港產(chǎn)城融合化”建設(shè)大背景下,孵化出“立體式”空間布局的研究與應(yīng)用,如“立體倉儲(chǔ)式”“立體軌道式”等總體布局可緩解港區(qū)用地緊張的問題,并引入社會(huì)商業(yè)增值服務(wù)。
4)結(jié)合機(jī)械自動(dòng)化、人工智能、視覺感知計(jì)算、新能源等前沿科技技術(shù)引入與應(yīng)用,港口裝卸設(shè)備趨于“高效率、高安全、高穩(wěn)定、低成本、智能化、綠色化”方向發(fā)展。
猜你喜歡
小主人報(bào)(2022年1期)2022-08-10 08:28:44
新作文·小學(xué)低年級(jí)版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學(xué)版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學(xué)版(2020年7期)2020-01-02 10:10:44
趣味(數(shù)學(xué))(2018年12期)2018-12-29 11:24:10
小學(xué)生作文(中高年級(jí)適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08