液壓廂板式撒肥機設計與研究
2022-11-01 06:38:38王海慶劉建華張運輝
農業裝備與車輛工程 2022年10期
王海慶,劉建華,張運輝
(528300 廣東省 佛山市 廣東皓耘科技有限公司)
0 引言
近年來,我國畜牧養殖產業快速發展,現已形成規模化、集約化,但養殖業產生的畜禽糞污未能及時有效處理,會污染地下水資源、土壤及大氣,影響人類健康與生態環境[1-2],如何采取高效、環保及有效的措施,從根源上解決糞污顯得尤為重要。農田長期使用化肥會造成土壤板結、肥力退化[3-4],而施加有機肥可增加土壤有機質與通透性,改善土壤團粒結構,保障農作物增產、增收[5-6]。隨著人們耕地養護與環保意識的提高,以畜禽糞污為原料,經發酵處理變為有機肥,撒施回歸農田的方式,成為解決糞污的有效措施。
目前,雙立輥撒肥機是固態有機肥撒施作業中廣泛應用的運輸、拋撒一體設備,具有拋撒均勻、幅寬較大、不易堵塞等優點[7-9]。歐美等發達國家撒肥機技術成熟、自動化程度高,但售價相對較高,配件供應困難[10-11]。我國撒肥機處于起步階段,研究學者、企業主要針對中小機型,以引進仿制、改進創新為主[12-14],但設計方法多為宏觀經驗推測,未能深入研究螺旋葉片拋撒機理、廄肥側壓規律、能量損耗等基礎理論,以及如何設計作業狀態監控、變量施肥控制系統可獲得高效、智能的拋肥裝備。
考慮到廄肥拋撒結構、廄肥側壓力對拋肥機性能、可靠性的影響,本文采用理論分析的方法對廄肥拋撒能耗、廄肥側壓力進行探究,以期揭示螺旋葉片拋撒機理及幅寬調控機理,為拋肥機實際生產設計提供理論依據與實現方法。
1 設計原則及組成
1.1 設計原則
廄肥是將畜禽糞污、秸稈碎料、飼料殘屑堆積發酵、腐熟而成,含水率較高,且含有一定的未降解植物纖維[15]。廄肥長時間堆積或在惡劣寒冷環境下會產生結塊,直接還田影響作物生長,拋撒作業時需將其破碎、松散。
考慮到廄肥物料特性及施肥農藝要求,樣機設計原則如下:(1)廄肥推送、拋撒兩過程的技術參數應協調統一,以避免作業過程中產生堵塞、缺料及過載,保證施肥均勻、連續及變量可調,從而實現精準施肥控制;(2)推肥機構應避免因砂礫、石塊、結塊、植物纖維存在而產生的卡滯,以減少動力消耗,提升推送效率;(3)拋撒機構應破碎廄肥中的結塊、粘接,確保撒肥均勻;此外,針對以植物纖維形式存在的廄肥,應及時切碎、松散,防止拋撒輥因纏繞而抱死;(4)傳動系統設置過載保護機構,保證拋肥系統動力傳遞平穩,以避免各零部件損害。(5)廄肥推送、拋撒邏輯動作控制應具備監控、反饋與調整,如拋肥輥轉速下降較大時,應停止推肥。
1.2 結構組成與工作原理
樣機主要由車架、牽引架、料箱總成、推肥系統、拋肥系統及行走系統等組成,其結構如圖1所示。其中,推肥系統采用液壓廂板方式推送廄肥,主要由推肥廂板、推肥軌道、推肥油缸(2 級)組成。拋肥系統采用雙立式螺旋拋肥輥,主要由拋肥葉片、破碎刀、拋肥爪、甩板及拋撒圓盤組成,具有拋撒幅寬較大等特點。
拋肥機通過拖拉機牽引運輸、作業。工作時,動力首先由拖拉機后輸出軸輸出,經三聯體變速箱換向后傳遞給拋肥系統,使兩拋肥輥相向轉動;然后,料箱肥門受到液壓油缸驅動,開啟至拋肥支架頂部;隨后,液壓動力傳遞給推肥油缸,驅動推肥板架將料箱內廄肥輸送至拋肥輥;廄肥受到旋轉破碎刀、拋肥爪的打擊而破碎,碎物料隨螺旋葉片向上輸送不斷破碎,經回轉邊緣拋出機外,滑落至拋撒圓盤的碎廄肥,在甩板的作用下,均勻拋撒還田。
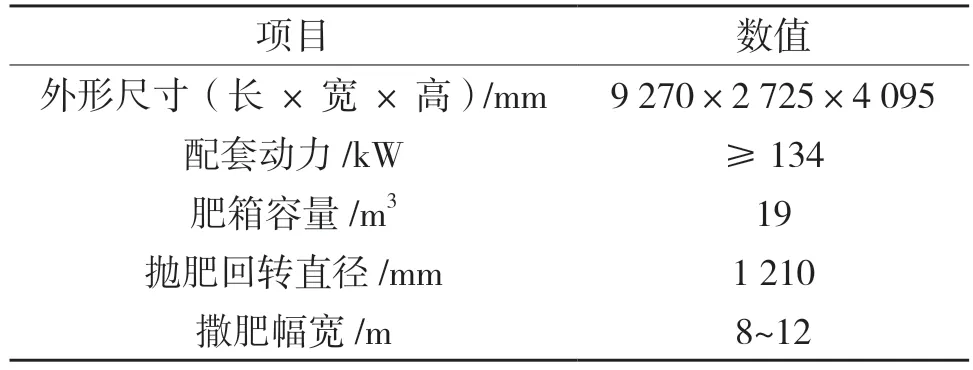
表1 撒肥機結構與技術參數Tab.1 Structure and technical parameters of manure spreader
2 料箱受力分析
料箱的主要作用為存儲廄肥物料,并與推肥系統共同作用,將廄肥向后輸送至拋肥輥。在運輸、靜置及作業過程中,廄肥會對箱體側板、前后端板產生側壓作用,最大載荷主要集中于料箱高度約1/3 處。這一載荷分布特征會使箱體側板底部螺紋連接處形成傾覆力矩,直接影響側板結構強度。為此,本文借鑒朗肯土壓力、庫倫土壓力及淺存倉側壁壓力等理論,分析箱體側板的受力情況,對側板結構設計具有一定指導意義。
2.1 靜置狀態廄肥側壓力
料箱內廄肥內部之間存在相互摩擦、土拱效應等多物理場效應,使廄肥沿一個或多個不規則滑動面剪切破壞,向兩側產生滑移(滑坡),從而對箱體側板產生側向壓力。側板壓力如圖2 所示。
圖2 中:H——箱體高度,m;φ——廄肥內摩擦角,°;α——側板(擋墻)與豎直方向的夾角,°;β——廄肥坡度角,錘切面內,廄肥切線與水平方向的夾角,°;θ——廄肥滑動水平傾角,°;δ——廄肥與側板的摩擦角,°;Ea——側壓力,N/m;N1——正壓力,N;FR——廄肥壓力,N;N2——正壓力,N。
根據朗肯土壓力、庫倫土壓力及淺存倉側壁壓力理論[16-18],對廄肥做出假設:物料為散粒體。廄肥對箱體的側壓力為:
式中:E——側板受到的壓力,N/m;Ka——廄肥填充壓實系數,取值1.2~1.5;γ——廄肥物料容重,kg/m3;g——重力加速度,m/s2。
考慮到工程應用及料箱側板危險位置,以廄肥側板的最大壓力為主動壓力。對式 (1)求導并獲取極大值,得到主動壓力為:
若廄肥箱體側板為直立側板,則側板主動壓力公式簡化為:
式中:Ea——側板受到廄肥的主動壓力,N/m;Kf——側板立柱數量補償系數,取值1.1~1.2;KZ——主動力壓力系數,直立側板、俯斜側板計算公式不同;h ——壓力集中點位置,mm。
由式(2)、式(4)、式(6)可知,料箱側板受到的側壓力主要影響廄肥的壓實程度、廄肥內摩擦角、側板支撐結構,主要受力點位于料箱高度的1/3 左右。
2.2 沖擊狀態側壓力
在顛簸、深坑及遇石塊等工況條件下,拋肥機車體會受到廄肥沖擊振動,直接影響料箱側板強度。料箱強度校驗核算應考慮沖擊振動這一因素[19-20],則側板動側壓力為:
式中:Ead——側板動側主壓力,N/m;a——車體縱向加速度,g,a 一般取0.6~0.8g。
2.3 側壓力分層計算
料箱側板結構形式不同時,由于各結構所對應的廄肥坡度角β、側板與豎直方向的夾角α存在較為明顯的差異,側壓力應分層計算。分層計算原則為:(1)頂層廄肥側壓力采用均質物料方法進行計算;(2)廄肥其它任意分層的側壓力計算時,其上層的物料應視為連續的均布載荷。
值得注意的是,撒肥箱體側壓力運算公式是基于廄肥狀態為散粒物料(低含水率土壤性狀)推算,而高含水率、較大粘度廄肥能否適應有待進一步商榷。
3 拋肥裝置設計與分析
目前,市場上廄肥拋撒裝置多為立式雙螺旋后拋撒結構,作業幅寬較大,可提高作業效率,為此拋肥裝置選用立式雙螺旋結構。考慮到機具作業環境、作業效率及廄肥性質等因素,設計主要目標為增加破碎效果、撒肥寬度及降低功耗。
3.1 技術參數確定
(1)拋肥輥轉速
拋肥輥轉速直接影響到螺旋葉片、破碎刀、甩板、拋撒圓盤的末端線速度,從而對拋肥裝置的破碎松散效果及拋撒寬度產生較大影響,決定了廄肥的拋撒均勻性、生產效率。此外,該轉速也是能量消耗的重要影響因素。拋肥輥轉速的提高可增大拋出的廄肥初速度,使得撒肥幅寬增大,從而提高工作效率。同時,拋肥輥轉速的提高會改善破碎效果,較好地保證拋撒均勻性,但轉速過高會增加能耗,減弱穩定性。拋肥輥轉速為
式中:n——拋肥輥理論轉速,r/min;X——工作幅寬,m;a——兩螺旋葉片中心距,m;R——葉片回轉直徑,m;h——廄肥高度中心到地面的高度,m;ε——單位時間內,廄肥拋撒時拋肥輥轉過的角度,°;K0——轉速修正系數。
對式(2)求導,獲得轉速n 極值
(2)拋肥輥傾斜角度
拋肥輥傾斜角度直接影響到撒肥作業性能,一般為10°~20°。研究資料表明[10],拋肥輥傾斜角度越大,施肥均勻性變異系數越小,施肥越均勻;撒肥幅寬會隨著拋肥輥傾斜角度先增大后減小。同時,拋肥輥傾斜角度越大會減弱拋撒裝置的穩定性。考慮到樣機結構、拋肥輥設計轉速等因素,拋肥輥傾斜角度設計為10°。
3.2 螺旋葉片
螺旋葉片是拋肥裝置的關鍵部件,主要作用是向上輸送物料,使物料在上升過程中不斷拋撒,保證撒肥的均勻性。此外,螺旋葉片配合破碎刀具增強碎肥效果。為使廄肥物料全部落入拋撒圓盤,螺旋葉片直徑須小于拋撒圓盤直徑。參見圖3。
為改善廄肥破碎效果,葉片邊緣處設置若干等直徑的圓弧切口,使受沖擊的廄肥不斷與破碎刀軌跡交叉運動,增加破碎機率。在葉片各圓弧切口相接處,沿周向交錯配置L 型破碎刀,以切碎植物纖維,避免葉片軸因纏繞而抱死。另外,L 型破碎刀成對配置,可增大打擊面積,從而改善破碎效果。此外,沿葉片邊緣周向且與L 型破碎刀間隔配置拋肥爪,以增大撒肥效果。
3.3 拋撒圓盤
拋撒圓盤與甩板、銷軸、固定板組成底部撒肥機構,甩板通過銷軸鉸連接于固定板。拋撒圓盤利用甩板的離心力將螺旋葉片表面滑落的廄肥拋撒還田,避免廄肥落在車體內損害零部件。參見圖4。
4 廄肥拋撒功耗分析
拋肥裝置主要依靠螺旋葉片旋轉所產生的離心力使廄肥獲得動能,同時葉片向上輸送廄肥物料克服重力做功。廄肥拋撒過程能量消耗主要分為2部分,一是拋肥葉片旋轉時從撞擊廄肥、帶廄肥運動至拋出且使物料具有一定動能所消耗的能量;二是拋肥系統動力傳遞過程中軸承、萬向節、變速箱等機械傳動因摩擦而損耗的能量。
4.1 拋肥功耗分析
為便于分析、研究與計算,取拋肥葉片單位時間內所拋送的廄肥量來確定功率消耗,不考慮大氣對廄肥的影響。此外,考慮到推肥機構速度較小,假定廄肥在與拋肥葉片相遇之前速度為0。
(1)廄肥拋撒量
廄肥拋撒量指單位時間內拋撒的物理量,計算公式為
式中:m——單位時間內的施肥量,kg/s;Q——每667 m2施有機肥的質量,kg;t0——每667 m2機具行走的時間,s。
其中,Q,t0可分別由式 (12)和式 (13)確定:
式中:ρ——廄肥密度,700~1 000 kg/m3;V——每667 m2施有機肥的體積,m3;B——拋撒寬度,m;v ——機具行走速度,m/s;S——土地面積,取S=667 m2。
(2)廄肥受葉片撞擊、隨葉片消耗的功率
廄肥進入拋肥裝置后,受到葉片(破碎刀)打擊、帶動并加速到與葉片相同轉速。由動量矩定理可得
式中:Jr——拋送輥轉動慣量,kg·mm2;ω——拋肥輥角速度,rad/s;ω0——撞擊后(瞬間)拋肥輥角速度,rad/s;l ——廄肥旋轉半徑;n0——拋肥輥轉速,r/min。
由能量守恒可得廄肥受葉片撞擊、隨葉片消耗的功率:
式中:P1——廄肥受葉片撞擊、隨葉片消耗的功率,kW;R——拋肥輥回轉半徑,mm;A——廄肥非均勻性系數,取值1.1~1.3。
(3)廄肥沿葉片滑移摩擦所消耗的功率
廄肥沿葉片滑移所消耗的功率為
式中:P2——單位時間內拋肥需要的功率,kW;t1——單位施肥時間,1 s;R0——拋肥輥中間軸半徑,mm。
(4)廄肥離開螺旋葉片時獲得的功率
式中:P3——廄肥離開葉片獲得的功率,kW;vr——廄肥相對速度,m/s;ζ——牽連速度與相對速度的夾角,°。
4.2 動力傳遞損耗
拋肥系統動力傳遞過程中,功率損耗主要為軸承摩擦、萬向節傳動,以及變速箱內部的齒輪嚙合、潤滑油的油阻及軸承摩擦等引起的損耗。動力傳遞功率損耗計算公式為
式中:ΣJTi——各傳動軸轉動慣量總和,kg·mm2;J1——變速箱輸入軸轉動慣量,kg·mm2;Ji——變速箱前其它旋轉部件轉動慣量,kg·mm2;J2——拋送輥轉動慣量,kg·mm2;J——折算到變速箱輸出軸的轉動慣量,kg·mm2;i——傳動系統減速比;ω——拋肥輥角速度,rad/s;n0——拋肥輥轉速,r/min;t——拋送輥啟動時間,s;T——拋送系統啟動需要的扭矩,N·m;P3——拋送系統啟動需要的功率,kW。Pc——動力傳遞損耗功率,kW;A0——損耗修正系數,取值1.1~1.3;η0——萬向節傳遞效率,取值0.97~0.99;η1——變速箱傳遞效率;η2——滾動軸承傳遞效率,取值0.99。
5 智能精準變量施肥控制策略
5.1 設計原則
廄肥主要是土壤性狀肥料,多用于底肥、基肥,精準變量施肥設計原則:
(1)針對不同的土壤特性、田間環境及土壤分布概況,實現精準變量拋撒肥量。
(2)廄肥物料喂入速率(推送速率)與撒肥速率(拋肥轉速)、作業速度等可采集、反饋與調控。
5.2 工作原理
精準變量施肥控制系統主要由稱重傳感器、推肥速度傳感器、車速傳感器,一、二級推肥油缸及控制閥組組成。推肥油缸通過控制閥組流量來實現推肥速度的精準控制。
作業時,精準施肥系統分別通過稱重傳感器、速度傳感器、車速傳感器實時采集廄肥質量、推肥速度、作業速度等數據信息,利用CAN 協議傳輸至車載ECU,并顯示在人機交互界面。用戶通過交互界面設置“目標施肥量”,并根據上述傳感數據信息計算施肥量,與目標施肥量實時追蹤對比與反饋,從而自動調控推肥速度、行駛速度,實現精準施肥。此外,該系統也可根據土壤肥力分布圖,實現田間不同區域的變量施肥。
5.3 廄肥稱重傳感器標定思考
以推肥速度方向為x 軸,車架體寬度方向為y軸,豎直為z 軸建立直角坐標系。考慮到撒肥機箱體內廄肥裝載狀態各異,廄肥向后推送過程中,物料質心會發生x、y、z 三個方向的變化,質心會對稱重傳感器產生繞x、y 兩方向的力矩,影響稱重傳感器讀數。稱重傳感器動態標定時,需要考慮x、y 方向質心坐標變化,x 方向可建立時間t 的線性標定函數,y 方向建立時間t 的非線性標定函數。
標定策略:以箱體底板為平面,廄肥沿x、y、z 軸細分成若干等分,記錄等分廄肥不同組合下(不同位置,不同質量)的質量,并獲取相對應廄肥質量下的傳感器讀數。基于遺傳算法等搜索記憶算法,以x、y、z 位置坐標以及傳感器讀數為輸入,廄肥質量為輸出建立標定函數關系式。
6 試驗與方法
6.1 試驗條件與材料
田間作業試驗與可靠性試驗在內蒙古通遼農場進行,試驗場地地表平整,坡度小于6°。試驗采用約翰迪爾1804 拖拉機,要求拖拉機使用前具備良好的性能狀態,駕駛員操作熟練,且了解廄肥拋肥機使用操作要求與規范。試驗用肥為牛羊糞堆肥,內部含有石塊、砂礫、粘接塊等。參見圖5。
6.2 試驗方法
為檢驗廄肥拋肥機的田間作業性能與可靠性,參照國家標準GB/T 25401-2010《農業機械 廄肥撒施機 環保要求和試驗方法》[21]及DG/T 106-2021《撒肥機》[22],主要測試內容包括拋撒寬度、施肥均勻性變異系數、軸承溫升等。
6.3 試驗結果
試驗結果如表2 所示。
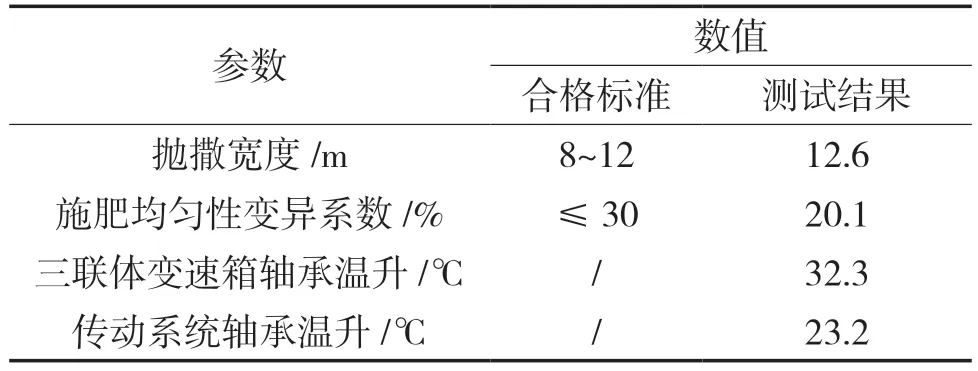
表2 田間試驗測試結果Tab.2 Field test results
由表2 可知,拋肥機撒肥寬度為12.6 m,施肥均勻性變異系數為20.1%,各項指標滿足國家標準。拋撒裝置軸承溫升較低,滿足設計要求。
7 結論
(1)基于理論力學等理論對機具料箱進行了受力分析,初步獲取了料箱側邊受力計算公式,但修正系數仍需進一步測試驗證;
(2)通過對廄肥拋肥過程中的功耗分析可知,拋肥功耗主要由拋撒廄肥、傳遞損失兩部分組成,其中,動力傳遞損失為軸承摩擦、萬向節傳動,以及變速箱內部的齒輪嚙合、潤滑油的油阻及軸承摩擦等引起的損耗。這一損耗可采用合理的加工精度與方法減少;
(3)田間試驗結果表明,拋肥機撒肥寬度、施肥均勻性變異系數分別為12.6 m、20.1%,滿足設計技術指標。