基于烏鴉算法的水輪機調速器參數優化研究
2022-11-02 11:37:12屈靖杰
大眾標準化 2022年19期
屈靖杰
(國能大渡河檢修安裝有限公司,四川 成都 610000)
目前我國水輪機調節系統大多采用PID控制,它對水電站電能質量有重要影響。調速器的比例(P)、積分(I)、微分(D)三種參數的設定決定了調節系統的調節性能,因此優化PID參數是改善系統調節能力的關鍵。
水輪機PID調速器的方法有:傳統的粒子群算法(PSO)、擾動觀察法(P&O)、遺傳算法(GA)等等,它們對水輪機調速器參數優化有積極的推動作用,但這些傳統算法都存在普遍存在收斂速度慢、精度低和易陷入局部最優等缺陷,同時算法存在調節參數多、算法復雜、振蕩幅度大的問題。學者們對傳統算法的不足進行改進,提出了仿生智能優化算法。
烏鴉算法(Crow Search Algorithm, CSA)是新型智能算法,它模擬烏鴉覓食竊取與反竊取行為。與相較傳統算法,CSA算法結構簡單,收斂速度快,精度高,有效避免陷入局部。目前在工程設計、圖像處理等優化問題中運用。
1 CSA算法
烏鴉會把剩余的食物藏起來,藏匿位置稱為記憶值;當竊取其他烏鴉食物時,而被竊取的烏鴉則會有一定的感知概率 ,會改變空間方位來保護食物。
CSA算法過程如下:首先生成大小為N的烏鴉群體:

(1)烏鴉j跟蹤烏鴉i,烏鴉i新位置:

(2)烏鴉j知道烏鴉i在跟蹤它,在空間隨機移動欺騙烏鴉i。
結合情況1、2,更新后的烏鴉位置為:

式中:rj是[0 1]之間的隨機數;APj,iter為烏鴉j在第ter次迭代后的感知概率AP;fli,iter是第i只烏鴉在iter次循環時的飛行距離。
1.1 算法步驟
步驟1:初始化參數N,fl、AP、iter;
步驟2:通過計算適應度函數,選出最優位置k*;
步驟3:隨機選取烏鴉j,如果ri≥AP,則烏鴉i更新位置:

步驟4:判斷新位置的可行性;
步驟5:重新計算適應度函數。比較前后適應度值更新烏鴉記憶;
步驟6:判斷迭代次數是否滿足要求。若滿足,輸出最優解;否則重新更新位置。
改進烏鴉算法流程圖如圖1所示。
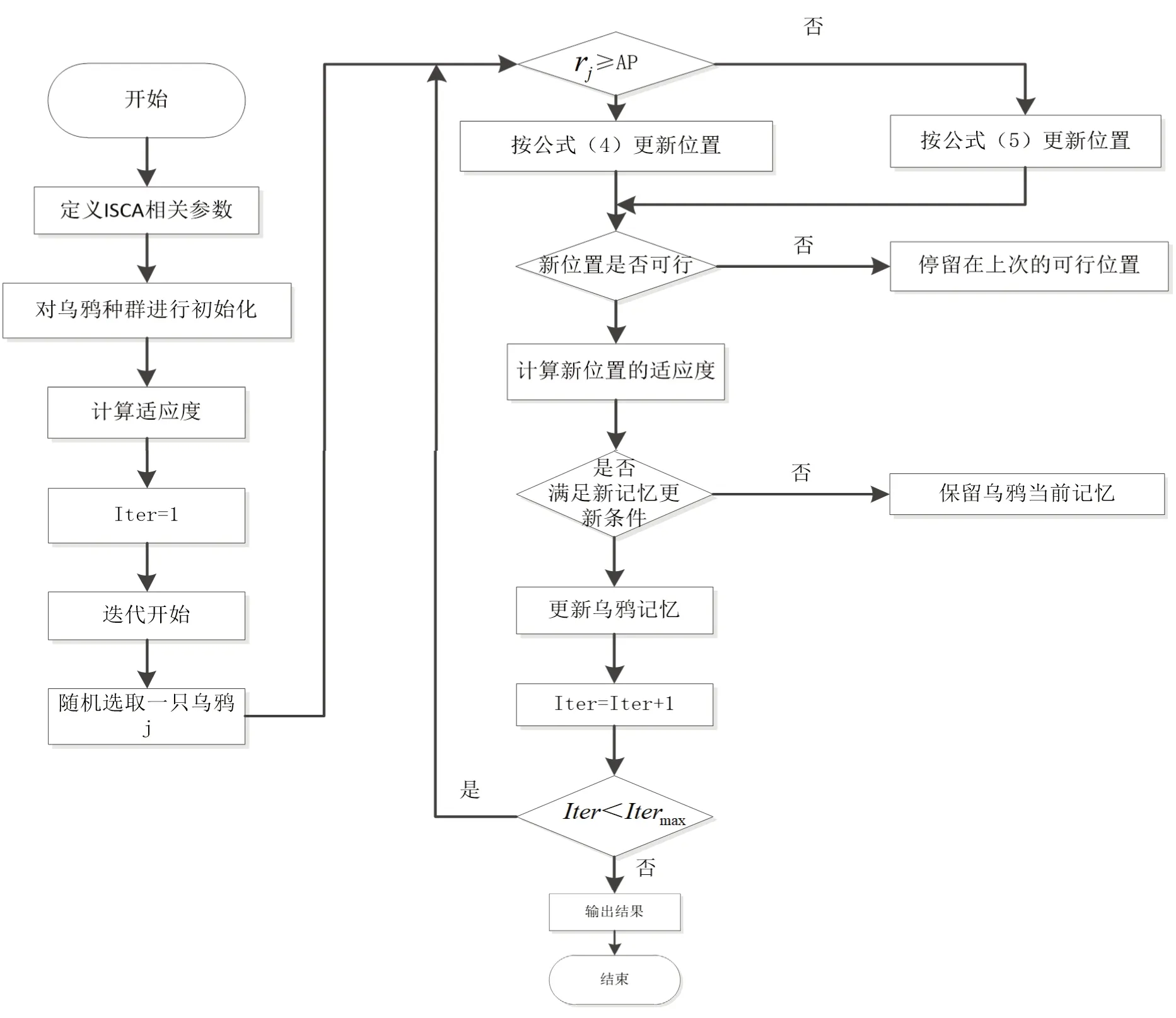
圖1 基于烏鴉算法的水輪機調速器參數優化的流程圖
2 基于CSA算法的水輪機PID調速器控制
2.1 典型水輪機調速器
典水輪機調節系統是由調節器、隨動系統、水輪機及引水系統、機組等部分組成。結構圖如2所示。

圖2 水輪機調節系統模型
圖中:Ty為接力器反應時間常數;ey為水輪機力矩對導葉開度的傳遞函數;eqh為水輪機流量對水頭的傳遞函數;eh水輪機力矩對水頭的傳遞函數;eqh為水輪機流量對導葉開度的傳遞函數;Tw為水流慣性時間常數;Ta為機組慣性時間常數;Tb為電網慣性時間常數;en為綜合自調節系數;xc為頻率給定值輸入;x為頻率輸出;mg0為負荷輸入。
調速系統分為連續系統與離散系統,調速器一般采用PID控制規律。決定了系統的穩定性,決定了系統的擾動抑制性能。

2.2 適應度函數的確定`
文章主要是對水輪機調節器的參數進行二次優化。首先根據給定值對模塊進行優化,得到優化后模塊的Kp值,然后將其固定,按照擾動抑制模塊進行優化,得到KiKd值。最終得到一組最優KpKiKd值,使系統的調節穩定時間更短,超調量更小。同時,采用ITAE準則作為性能指標函數,它的定義為:

式中:t為時間;e(t)為誤差。
3 仿真分析與結果分析
通過對水輪機調速器的數學模型進行Matlab/Simulink平臺下仿真實驗,驗證CSA算法的有效性與可靠性,并且與PSO算法就行對比。對于數值固定的模型參數如表1。

表1 水輪機傳遞系數
CSA算法的參數設置為:最大迭代次數為200,種群總數為30。優化參數的設置為:Kp、Ki、Kd的上限為10,下限為0。
3.1 空載工況實驗仿真
將模型置于空載情況下,對仿真機施加5%的頻率擾動。實驗結果如圖3~圖4所示。

圖3 5%頻率擾動轉速響應曲線
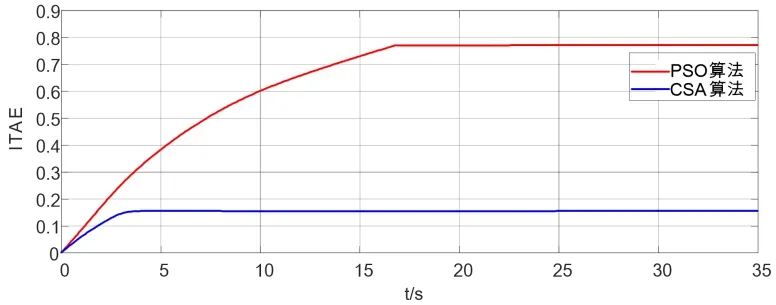
圖4 ITAE指標響應曲線
從圖3可知,在空載工況5%頻率擾動中,采用PSO算法的PID調節系統,其超調量較大,調節時間較長,PID最優參數值為Kp=3.01,Ki=1.37,Kd=2.49;采用CSA算法的PID調節系統,其超調量小,調節時間短,調節效率高,PID最優參數值為Kp=3.86,Ki=1.05,Kd=2.94。從圖4可知,CSA算法的轉速偏差ITAE指標更小,更早趨于穩定,表明CSA算法性能要遠高于PSO算法。
3.2 負荷工況實驗仿真
當水電站的負荷端擾動會造成供電頻率的波動,系統需要做出響應穩定供電頻率。為了驗證CSA算法的調節能力,設置孤網10%的負荷擾動實驗。實驗結果如圖5~圖6所示。
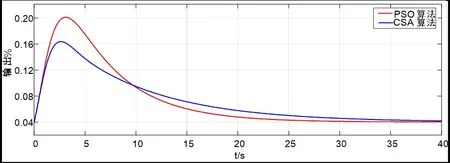
圖5 10%負荷擾動轉速響應曲線
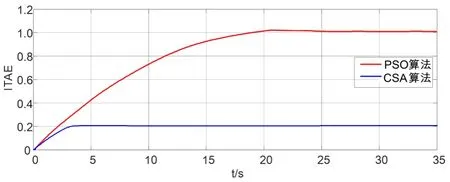
圖6 ITAE指標響應曲線
從圖5可知,在孤網10%的負荷擾動實驗中,采用PSO算法的PID調節系統,其超調量大,調節時間較長,穩定時間長,系統波動較大,PID最優參數值為Kp=4.26,Ki=1.58,Kd=2.84;采用CSA算法的PID調節系統,其超調量小,調節時間短,系統達到穩定時間短,PID最優參數值為Kp=5.13,Ki=1.16;Kd=3.22。圖6可 知,CSA算 法的ITAE指標更小,系統收斂時間短,CSA算法性能更優。
4 結論
為提高水輪機PID調速器的參數質量,文章提出了一種基于烏鴉算法的水輪機調速器參數優化。相較于用傳統方法優化,使用CSA算法收斂速度更快,有效避免局部最優,有更好的魯棒性。在空載工況實驗和負荷工況實驗仿真中,驗證了CSA算法在優化調速器參數,其超調量小,調節時間短,系統穩定快,調節效率高,ITAE指標更小。
猜你喜歡
大電機技術(2022年3期)2022-08-06 07:48:56
大電機技術(2021年3期)2021-07-16 05:38:24
裝備制造技術(2020年4期)2020-12-25 05:26:00
小天使·一年級語數英綜合(2018年5期)2018-06-22 10:27:56
小學閱讀指南·低年級版(2017年2期)2017-03-23 12:56:46
水電站機電技術(2016年1期)2016-02-28 14:21:50
水電站機電技術(2016年1期)2016-02-28 14:21:36
合成技術及應用(2015年3期)2015-12-11 08:36:27
紅領巾·萌芽(2014年1期)2014-12-01 09:02:57
水電站機電技術(2014年4期)2014-10-13 08:30:03
