工業(yè)鍋爐智能監(jiān)控系統(tǒng)設(shè)計(jì)與優(yōu)化
2022-11-02 13:03:40孫永芳
工業(yè)加熱 2022年9期
孫永芳
( 陜西國(guó)防工業(yè)職業(yè)技術(shù)學(xué)院 智能制造學(xué)院,陜西 西安 710300)
工業(yè)鍋爐憑借自身優(yōu)勢(shì)被應(yīng)用于多種工業(yè)領(lǐng)域,成為工業(yè)企業(yè)最普遍的動(dòng)力設(shè)備之一,其功能為:通過(guò)燃料在爐膛內(nèi)燃燒,鍋爐可將燃燒過(guò)程中產(chǎn)生的熱量轉(zhuǎn)化為熱能,并以蒸汽或熱水的形式輸送至工業(yè)生產(chǎn)的各種設(shè)備。但是傳統(tǒng)工業(yè)鍋爐主要采用人工的方式進(jìn)行控制,極少數(shù)大型工業(yè)鍋爐采用簡(jiǎn)單的儀表單回路調(diào)節(jié)系統(tǒng)實(shí)現(xiàn)對(duì)液位、壓力等數(shù)據(jù)的控制,該方式對(duì)于燃料的浪費(fèi)程度較大。為此本研究采用智能化的方式設(shè)計(jì)出工業(yè)鍋爐智能監(jiān)控系統(tǒng),對(duì)于工農(nóng)業(yè)生產(chǎn)領(lǐng)域的發(fā)展具有重要意義。
1 工業(yè)鍋爐智能監(jiān)控系統(tǒng)控制方案設(shè)計(jì)
工業(yè)鍋爐的結(jié)構(gòu)組成為:爐膛、燃燒室、熱交換、自動(dòng)上排料系統(tǒng)、內(nèi)循環(huán)系統(tǒng)、外循環(huán)系統(tǒng)和燃燒控制系統(tǒng)共同組成。鍋爐在燃燒過(guò)程中,其燃料主要由上料傳送帶直接傳送至爐膛,燃燒完畢后經(jīng)排渣傳送帶自動(dòng)排出。爐膛溫度的控制流程為:通過(guò)鼓風(fēng)機(jī)和引風(fēng)機(jī)協(xié)同作用,對(duì)燃燒室含氧量進(jìn)行精準(zhǔn)控制,以此實(shí)現(xiàn)對(duì)溫度的控制,風(fēng)門(mén)部分主要采用機(jī)械式風(fēng)門(mén),該風(fēng)門(mén)可隨著鼓風(fēng)機(jī)風(fēng)量的大小自動(dòng)開(kāi)關(guān)。對(duì)爐膛內(nèi)熱量進(jìn)行傳導(dǎo)時(shí),利用內(nèi)循環(huán)系統(tǒng)使熱水經(jīng)過(guò)內(nèi)循環(huán)泵,最終到達(dá)熱交換器,由熱交換器將水的熱量傳導(dǎo)至各個(gè)使用區(qū),外循環(huán)系統(tǒng)的作業(yè)流程與內(nèi)循環(huán)基本相似。該控制系統(tǒng)主要通過(guò)對(duì)爐膛壓力、溫度及水位進(jìn)行檢測(cè),實(shí)現(xiàn)自動(dòng)控制鼓風(fēng)機(jī)和引風(fēng)機(jī),完成對(duì)爐內(nèi)溫度的控制。為保證工業(yè)鍋爐的安全,對(duì)鍋爐壓力的上限值進(jìn)行設(shè)定,當(dāng)爐內(nèi)壓力達(dá)到上限值時(shí),控制系統(tǒng)可自動(dòng)開(kāi)啟電控泄壓閥。內(nèi)循環(huán)系統(tǒng)對(duì)熱能的有效利用主要通過(guò)檢測(cè)內(nèi)循環(huán)水位,實(shí)現(xiàn)對(duì)內(nèi)循環(huán)泵的自動(dòng)控制[1]。
控制系統(tǒng)為實(shí)現(xiàn)對(duì)鍋爐運(yùn)行狀態(tài)的實(shí)時(shí)監(jiān)控,將上位機(jī)監(jiān)控系統(tǒng)建立于組態(tài)王6.53上,并在該系統(tǒng)中設(shè)置工業(yè)鍋爐的運(yùn)行數(shù)據(jù)。對(duì)工業(yè)鍋爐的控制器進(jìn)行設(shè)計(jì)時(shí),為實(shí)現(xiàn)對(duì)風(fēng)機(jī)和泵的轉(zhuǎn)速進(jìn)行自動(dòng)控制,主要以CJ1M系列的PLC作為核心,通過(guò)A/D擴(kuò)展模塊對(duì)鍋爐溫度和壓力等信息的準(zhǔn)確讀取,并由PLC運(yùn)算后經(jīng)D/A模塊對(duì)模擬量進(jìn)行輸出,最終對(duì)系統(tǒng)變頻器進(jìn)行控制,該方式可達(dá)成現(xiàn)場(chǎng)操作補(bǔ)水、給煤控制等,工業(yè)鍋爐控制系統(tǒng)結(jié)構(gòu)如圖1所示[2]。
2 工業(yè)鍋爐智能監(jiān)控系統(tǒng)總體設(shè)計(jì)
該系統(tǒng)主要由PCI數(shù)據(jù)采集卡、工業(yè)控制計(jì)算機(jī)以及多種傳感器和執(zhí)行器共同組成,為保證工業(yè)鍋爐智能監(jiān)控系統(tǒng)的穩(wěn)定運(yùn)行,本研究主要采用上位機(jī)+下位機(jī)的控制模式實(shí)現(xiàn)對(duì)工業(yè)鍋爐的智能監(jiān)控。上位機(jī)在工業(yè)鍋爐智能監(jiān)控系統(tǒng)中主要負(fù)責(zé)對(duì)軟件部分進(jìn)行監(jiān)控和數(shù)據(jù)分析,而下位機(jī)主要負(fù)責(zé)對(duì)數(shù)據(jù)進(jìn)行采集與控制輸出。該系統(tǒng)的結(jié)構(gòu)組成為:汽包液位控制子系統(tǒng)、爐膛壓力調(diào)節(jié)子系統(tǒng)以及蒸汽溫度調(diào)節(jié)子系統(tǒng),其中汽包液位控制子系統(tǒng)包括液位變送器、蒸汽流量計(jì)以及調(diào)節(jié)閥開(kāi)度;爐膛壓力調(diào)節(jié)子系統(tǒng)包括壓力變送器、蒸汽流量計(jì)以及調(diào)節(jié)閥開(kāi)度;蒸汽溫度調(diào)節(jié)子系統(tǒng)由兩個(gè)溫度傳感器和一個(gè)調(diào)節(jié)閥開(kāi)度共同組成,工業(yè)鍋爐智能監(jiān)控系統(tǒng)總體結(jié)構(gòu)如圖2所示[3]。
3 工業(yè)鍋爐智能監(jiān)控系統(tǒng)硬軟件設(shè)計(jì)
3.1 鍋爐智能監(jiān)控系統(tǒng)硬件設(shè)計(jì)
該智能監(jiān)控系統(tǒng)的硬件設(shè)計(jì)部分主要由電源模塊、CPU模塊、開(kāi)關(guān)量輸入模塊、開(kāi)關(guān)量輸出模塊、模擬量輸入模塊、模擬量輸出模塊以及終端板共同組成,為保證系統(tǒng)的穩(wěn)定運(yùn)行,本研究通過(guò)對(duì)硬件部分的連接及I/O端口分配進(jìn)行設(shè)計(jì),有利于實(shí)現(xiàn)智能監(jiān)控系統(tǒng)的實(shí)時(shí)監(jiān)控[4]。
3.1.1 鍋爐智能監(jiān)控系統(tǒng)硬件連接
該智能監(jiān)控系統(tǒng)硬件連接部分的工作流程為:利用傳感器的功能,將系統(tǒng)檢測(cè)到的溫度信號(hào)轉(zhuǎn)換成4~20 mA的電流信號(hào),信號(hào)轉(zhuǎn)換完成后,由鍋爐智能監(jiān)控系統(tǒng)對(duì)模擬量輸入模塊進(jìn)行信號(hào)配置,從而實(shí)現(xiàn)把電流信號(hào)轉(zhuǎn)換成數(shù)字信號(hào),最后將轉(zhuǎn)換成功的數(shù)字信號(hào)送入PLC控制器中進(jìn)行相關(guān)處理[5]。
3.1.2 鍋爐智能監(jiān)控系統(tǒng)I/O端口分配
鍋爐智能控制系統(tǒng)主要由周邊控制程序段、內(nèi)循環(huán)溫度程序段、鼓風(fēng)機(jī)控制程序段、模擬量AD讀取程序段以及模擬量DA寫(xiě)出控制程序段共同組成。對(duì)智能監(jiān)控系統(tǒng)的I/O端口進(jìn)行分配時(shí),為保證該端口的合理分配,將鍋爐智能控制系統(tǒng)的輸入輸出點(diǎn)分為鍋爐壓力、溫度、水位、內(nèi)循環(huán)溫度、鼓風(fēng)機(jī)頻率以及內(nèi)循環(huán)泵頻率等單元,鍋爐智能監(jiān)控系統(tǒng)I/O端口分配如表1所示[6]。
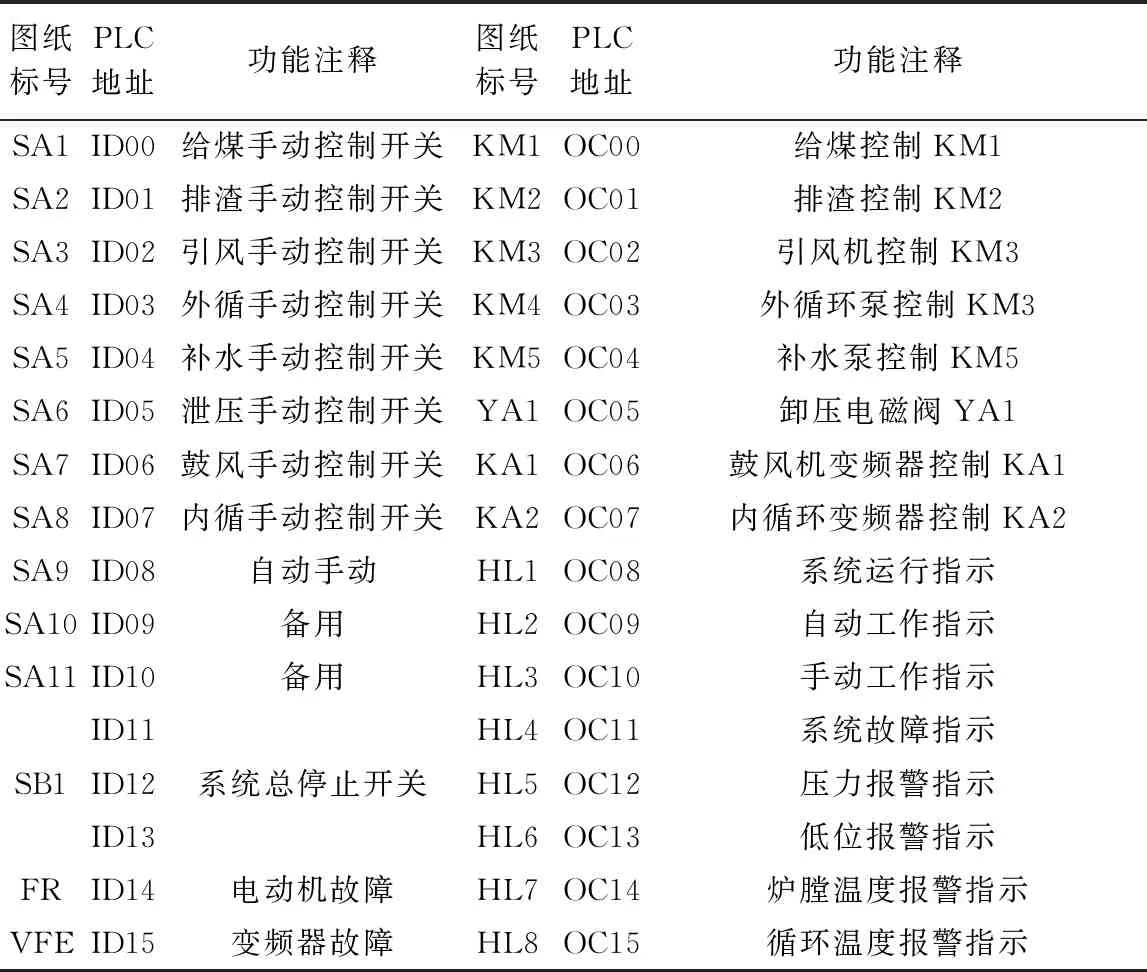
表1 鍋爐智能監(jiān)控系統(tǒng)I/O端口分配表
3.2 鍋爐智能監(jiān)控系統(tǒng)軟件設(shè)計(jì)
為保證工業(yè)鍋爐智能監(jiān)控系統(tǒng)的穩(wěn)定運(yùn)行,本研究對(duì)該系統(tǒng)的軟件部分進(jìn)行設(shè)計(jì)時(shí),重點(diǎn)研究上位組態(tài)軟件組態(tài)王人機(jī)界面,并對(duì)工業(yè)鍋爐內(nèi)的各個(gè)參數(shù)進(jìn)行控制,其參數(shù)控制流程為:首先依次對(duì)各個(gè)寄存器及A/D模塊參數(shù)進(jìn)行初始化,初始化完成后,對(duì)入口A/D信號(hào)進(jìn)行采集,并將采集的入口A/D信號(hào)進(jìn)行濾波,通過(guò)對(duì)濾波后的信號(hào)進(jìn)行計(jì)算,即可獲取當(dāng)前工業(yè)鍋爐的爐膛溫度、壓力以及液位的過(guò)程值,最后從人機(jī)界面可對(duì)各參數(shù)數(shù)據(jù)進(jìn)行讀取。在參數(shù)控制過(guò)程中,應(yīng)在工業(yè)鍋爐智能監(jiān)控系統(tǒng)內(nèi)對(duì)各參數(shù)的最大數(shù)值進(jìn)行設(shè)定,若各參數(shù)數(shù)據(jù)達(dá)到設(shè)定值,即可將數(shù)據(jù)結(jié)果輸出,若各參數(shù)數(shù)據(jù)未達(dá)到設(shè)定值,應(yīng)將數(shù)值繼續(xù)升高,直至參數(shù)數(shù)據(jù)達(dá)到設(shè)定值。
3.2.1 下位PLC控制流程
對(duì)工業(yè)鍋爐智能監(jiān)控系統(tǒng)下位機(jī)PLC控制流程進(jìn)行設(shè)計(jì)時(shí),應(yīng)充分結(jié)合工業(yè)鍋爐的實(shí)際控制要求,并按照工業(yè)鍋爐的工藝過(guò)程對(duì)相關(guān)數(shù)據(jù)進(jìn)行整理。該方式有利于更加便捷地對(duì)系統(tǒng)程序進(jìn)行編寫(xiě),使工業(yè)鍋爐可達(dá)到預(yù)期溫度、壓力以及液位穩(wěn)定的控制目標(biāo)。下位PLC控制流程為:首先進(jìn)入PLC控制入口,向PLC控制器中輸入工業(yè)鍋爐的各個(gè)參數(shù),對(duì)I/O數(shù)據(jù)進(jìn)行樣本采集,并利用PID算法對(duì)該數(shù)據(jù)進(jìn)行運(yùn)算,根據(jù)運(yùn)算獲取的最終結(jié)果,即可對(duì)I/O設(shè)備進(jìn)行更新,并將最終成果輸出至PLC控制出口。
3.2.2 上位人機(jī)界面
對(duì)上位人機(jī)界面進(jìn)行設(shè)計(jì)時(shí),主要采用組態(tài)王軟件實(shí)現(xiàn)人機(jī)交互。該界面可充分體現(xiàn)出工業(yè)鍋爐內(nèi)待控制參數(shù)的變化趨勢(shì),并且可展現(xiàn)出工業(yè)鍋爐智能監(jiān)控系統(tǒng)的實(shí)際工藝流程,對(duì)PLC控制器進(jìn)行參數(shù)設(shè)定時(shí),為保證工業(yè)鍋爐智能監(jiān)控系統(tǒng)的工藝流程更具個(gè)性化,將人機(jī)界面以圖形的方式向用戶(hù)展示,有利于用戶(hù)更加直觀地了解工業(yè)鍋爐智能監(jiān)控系統(tǒng)的操作流程[7]。
4 工業(yè)鍋爐智能監(jiān)控系統(tǒng)汽包液位控制子系統(tǒng)設(shè)計(jì)
由于汽包液位控制子系統(tǒng)對(duì)于工業(yè)鍋爐的正常運(yùn)行具有重要維持作用,本研究為實(shí)現(xiàn)對(duì)工業(yè)鍋爐的實(shí)時(shí)監(jiān)控,對(duì)該智能監(jiān)控系統(tǒng)的汽包液位控制子系統(tǒng)進(jìn)行重點(diǎn)研究,并利用模糊-PID控制技術(shù)對(duì)該系統(tǒng)進(jìn)行設(shè)計(jì)。
4.1 汽包液位控制子系統(tǒng)總體方案
傳統(tǒng)汽包液位控制方式對(duì)工業(yè)鍋爐進(jìn)行液位控制時(shí),受“虛假水位”的影響較大,可造成工業(yè)鍋爐的液位控制存在一定誤差,該誤差可表現(xiàn)為:當(dāng)工業(yè)鍋爐內(nèi)負(fù)載持續(xù)變大時(shí),汽包水位與之相反,處于不斷上升狀態(tài),該現(xiàn)象可直接造成汽包液位控制系統(tǒng)出現(xiàn)錯(cuò)誤決斷,而對(duì)工業(yè)鍋爐的調(diào)節(jié)閥進(jìn)行控制。本研究為解決傳統(tǒng)汽包液位控制方式存在的問(wèn)題,充分利用模糊-PID控制技術(shù)的優(yōu)勢(shì),對(duì)工業(yè)鍋爐的汽包液位進(jìn)行控制。
4.2 模糊-PID控制器設(shè)計(jì)
該設(shè)計(jì)是基于工業(yè)鍋爐汽包液位控制方案的基礎(chǔ)上進(jìn)行實(shí)現(xiàn)的,為保證該系統(tǒng)的穩(wěn)定運(yùn)行,本研究對(duì)模糊控制系統(tǒng)的整體方案進(jìn)行設(shè)計(jì),基于模糊-PID控制技術(shù)的控制系統(tǒng)如圖3所示[8]。
對(duì)模糊-PID控制器進(jìn)行設(shè)計(jì)時(shí),首先應(yīng)對(duì)模糊-PID控制技術(shù)中的各項(xiàng)參數(shù)進(jìn)行修改。本研究修改PID各項(xiàng)參數(shù)過(guò)程中,主要依據(jù)模糊控制規(guī)則,并對(duì)各參數(shù)之間存在的偏差e的變化規(guī)律進(jìn)行總結(jié),由此可推導(dǎo)出比例系數(shù)、微分系數(shù)以及積分系數(shù)的變化量,分別記作Kp、Kd、Ki。通過(guò)對(duì)各系數(shù)的變化量進(jìn)行推導(dǎo),即可實(shí)現(xiàn)對(duì)工業(yè)鍋爐智能監(jiān)控系統(tǒng)性能的最優(yōu)化,PID參數(shù)模糊控制規(guī)律如表2所示。
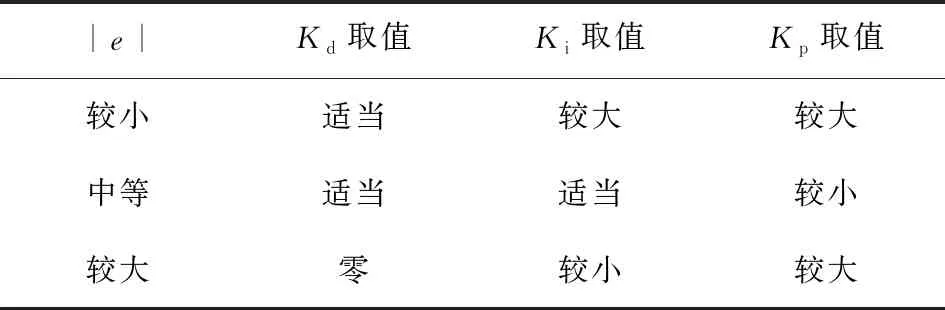
表2 PID參數(shù)模糊控制規(guī)律
模糊-PID控制器可實(shí)現(xiàn)對(duì)PID各項(xiàng)參數(shù)進(jìn)行實(shí)時(shí)調(diào)節(jié),其實(shí)現(xiàn)方式為:根據(jù)偏差絕對(duì)值|e|、偏差和的絕對(duì)值|ec|、偏差變化率絕對(duì)值|∑e|,并及時(shí)對(duì)時(shí)間進(jìn)行調(diào)整后,充分利用模糊PID技術(shù)即可實(shí)現(xiàn)實(shí)時(shí)調(diào)節(jié)PID參數(shù)。將工業(yè)鍋爐液位控制過(guò)程中存在的誤差e與誤差變化量ec作為輸入量輸入至控制器中,并利用查詢(xún)模糊推理算法的方式獲取決策表,最終可獲得Kp、Kd、Ki的修正系數(shù),將其代入以下公式:
(1)

汽包液位控制器的模糊輸入量存在液位偏差、偏差變化與偏差和,三者分別表示為e(k)、ec(k)=e(k)+e(k-1)、∑e(k)=e(k)+e(k-1)
模糊控制輸出量為
ΔKp、ΔKi、ΔKd
不同變量的模糊論域分配方式為
e(k)、∑e(k)、ec(k)、ΔKp、ΔKd的論域?yàn)?/p>
{-3,-2,-1,0,1,2,3}
對(duì)PID各變量模糊子集論域進(jìn)行設(shè)定時(shí),可根據(jù)模糊控制的一般理論完成設(shè)定,其論域?yàn)閧NB,NM,NS,O,PS,PM,PB},各論域代表的含義為{負(fù)大、負(fù)中、負(fù)小、零、正小、正中、正大}。
5 汽包液位控制子系統(tǒng)的Matlab仿真驗(yàn)證
為保證工業(yè)鍋爐智能監(jiān)控系統(tǒng)的穩(wěn)定運(yùn)行,并驗(yàn)證該系統(tǒng)的實(shí)際控制結(jié)果,采用Matlab中的Simulink對(duì)智能監(jiān)控系統(tǒng)進(jìn)行仿真測(cè)試。仿真流程為:Matlab使用模糊控制技術(shù),Simulink使用模糊-PID控制技術(shù),在加入給水?dāng)_動(dòng)的情況下對(duì)監(jiān)控系統(tǒng)進(jìn)行仿真驗(yàn)證。仿真過(guò)程中將工業(yè)鍋爐內(nèi)的液位值設(shè)定為45 mm,待監(jiān)控系統(tǒng)處于穩(wěn)定狀態(tài)時(shí),并且穩(wěn)定時(shí)間持續(xù)到500 s時(shí)刻加入給水?dāng)_動(dòng),模糊-PID控制仿真響應(yīng)曲線(xiàn)如圖4所示。
通過(guò)對(duì)仿真結(jié)果進(jìn)行分析可知,在工業(yè)鍋爐內(nèi)液位高度為45 mm時(shí),使用模糊控制技術(shù)汽包液位控制子系統(tǒng)的水位進(jìn)行監(jiān)控與PID控制相比可發(fā)現(xiàn),其最大超調(diào)量變小,調(diào)節(jié)時(shí)間明顯減少。而在500 s時(shí)刻向系統(tǒng)中加入給水?dāng)_動(dòng)可發(fā)現(xiàn),模糊-PID控制下的超調(diào)量更具優(yōu)勢(shì)。
6 結(jié) 語(yǔ)
本研究為實(shí)現(xiàn)對(duì)工業(yè)鍋爐的智能監(jiān)控,設(shè)計(jì)了一種工業(yè)鍋爐智能監(jiān)控系統(tǒng),并介紹了該系統(tǒng)中的核心應(yīng)用方法——模糊PID控制技術(shù)。將該技術(shù)應(yīng)用于汽包液位控制系統(tǒng)中,有利于提升工業(yè)鍋爐的穩(wěn)態(tài)性能。由于傳統(tǒng)汽包液位控制方式對(duì)工業(yè)鍋爐進(jìn)行液位控制時(shí),當(dāng)工業(yè)鍋爐內(nèi)負(fù)載持續(xù)變大時(shí),汽包水位與之相反,處于不斷上升狀態(tài),該現(xiàn)象可直接造成汽包液位控制系統(tǒng)出現(xiàn)錯(cuò)誤決斷,不利于系統(tǒng)的穩(wěn)定運(yùn)行,為解決傳統(tǒng)汽包液位控制方式存在的問(wèn)題,充分利用模糊-PID控制技術(shù)的優(yōu)勢(shì),對(duì)工業(yè)鍋爐的汽包液位進(jìn)行控制。通過(guò)仿真驗(yàn)證的方式對(duì)該系統(tǒng)的精確度進(jìn)行驗(yàn)證,其結(jié)果表明,該系統(tǒng)的穩(wěn)態(tài)性能較強(qiáng),對(duì)于工業(yè)鍋爐的控制精度具有提升作用。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
測(cè)控技術(shù)(2018年9期)2018-11-25 07:45:00
石油化工自動(dòng)化(2018年5期)2018-11-14 02:34:30
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45